Группа изобретений относится к области контроля перемещающихся своим ходом транспортных средств и других подвижных объектов и может быть использована для досмотра с целью обнаружения несанкционированного перевоза людей, животных, скрытых предметов, веществ и материалов для обеспечения безопасности, и надежности контроля.
В настоящее время с распространением терроризма и контрабандной торговли существует потребность в системах, которые могут эффективно сканировать транспортные средства и грузы с целью обнаружения подозрительных товаров и незаконных веществ. Наибольшее распространение для решения этой задачи получили способы, основанные на применении излучения с высокой проникающей способностью, в частности рентгеновского [1]. Чаще всего досмотр объекта осуществляется его сканированием зондирующим излучением, при этом регистрируется либо прошедшее сквозь объект излучение в результате чего получая его теневое изображение, либо обратно рассеянное. Перемещение области сканирования относительно источника излучения может осуществляться как за счет движения транспортного средства, так и за счет перемещения источника излучения при неподвижном объекте контроля. Весьма важным параметром досмотрового комплекса является его производительность, измеряемая обычно в количестве досмотренных объектов в час.
Технология досмотра, основанная на формировании теневого изображения и последующем его анализе, весьма эффективна для обнаружения предметов, состоящих из материалов с относительно высоким атомным номером, например, огнестрельного оружия. Поскольку поглощение рентгеновского (тормозного) излучения сильно зависит от плотности и атомного номера исследуемых веществ, то в указанном выше случае формируется высококонтрастное, удобное для анализа, теневое изображение. Вследствие высокого поглощения зондирующего излучения, для инспекции крупногабаритных объектов, необходимо применять мощные источники (например, линейные ускорители электронов), которые без принятия должных мер могут создать недопустимо высокую лучевую нагрузку для человека (водителя), оказавшегося в зоне досмотра. По этой причине, водитель в таких системах на момент инспекции покидает автотранспорт, что принципиально приводит к снижению пропускной способности, которая не превосходит обычно 25-30 единиц в час [2].
Для ускорения процесса контроля, в ряде систем водитель не покидает кабины и движение объекта осуществляется своим ходом, но в этом случае требуются меры по защите водителя от излучения. Безопасность водителя обеспечивается заездом транспортного средства перед началом сканирования на определенную позицию, в которой кабина водителя находится вне области сканирования. После фиксации данного положения, выдается команда на начало движения автотранспорта и включение источника радиационного излучения. Кабина водителя при этом не сканируется. Основным недостатком данных систем является необходимость остановки транспортного средства перед началом сканирования, что ограничивает пропускную способность, а неизбежная при этом неравномерность движения в процессе сканирования отрицательно сказывается на качестве теневого изображения и, в целом, на качестве досмотра. Кроме того, кабина водителя и предшествующая ей часть транспортного средства, не контролируются. В таких системах достигается пропускная способность до 60 единиц в час.
Известны системы с пропускной способностью до 200 единиц в час, работающие без остановки движущегося своим ходом транспортного средства. Такие системы содержат датчики, которые фиксируют прохождение части объекта, не подлежащей облучению, автоматически определяют зону радиационного сканирования и управляют процессом включения и выключения источника радиационного излучения [3].
Одной из таких систем, является система, основанная на лазерном сканировании транспортного средства перед зоной облучения [4]. Лазерное сканирование позволяет во многих случаях определить зону радиационного сканирования по наличию зазора между кабиной водителя и грузовой частью инспектируемого объекта. Усовершенствованием таких систем являются системы досмотра [5] позволяющие перестраивать энергию сканирующего излучения, т.е. сканировать кабину транспортного средства низкоэнергетическим излучением, а груз высокоэнергетическим излучением. Основным недостатком таких систем является ограниченность ее применения, поскольку она может быть использована лишь с определенным видам транспортных средств, имеющих видимый зазор между кабиной водителя и грузовой частью.
Технология, основанная на регистрации рассеянного излучения, также широко применяется в досмотровых комплексах [6]. Одно из достоинств этой технологии заключается в том, что она позволяет эффективно обнаруживать скрытые объекты, состоящие из легких веществ с невысокой плотностью (например, биологические объекты, взрывчатые вещества, наркотики). Такие объекты трудно обнаружить из анализа теневого изображения, полученного с помощью рентгеновского излучения высокой проникающей способностью.
Другим несомненным достоинством этой технологии является то, что доза облучения, поглощенная объектом досмотра может быть сделана чрезвычайно низкой, не представляющей никакой опасности для здоровья человека, находящегося в зоне радиационного сканирования. По этой причине (водителю) людям не требуется покидать транспортное средство во время досмотра. Характерной чертой досмотровых комплексов транспортных средств, использующих обратное рассеяние, является то, что энергия зондирующего излучения существенно ниже, чем энергия зондирующего излучения комплексов, работающих на просвечивание, и не превосходит, как правило, нескольких сотен кэВ. Это обстоятельство является принципиальной особенностью установок, использующих обратное рассеяние, поскольку с их помощью удается контролировать лишь приповерхностные слои инспектируемого объекта. По этой причине, досмотровые комплексы для транспортных средств могут состоять из нескольких однотипных аппаратов с невысокой энергией зондирующего пучка, использующих как рассеянное излучение, так и излучение, прошедшее сквозь объект.
Известна наиболее развитая среди известных система [7], в которой используется источник (либо источники) рентгеновского излучения и набор не пиксельных детектирующих систем, регистрирующих излучение, прошедшее сквозь объект и обратно рассеянное.
Основным недостатком данной системы, несмотря на комбинированное использование обеих технологий (трансмиссионной и обратного рассеяния), является ограниченность ее применения только к определенным видам транспортных средств, преимущественно легковым, так как относительно невысокая энергия зондирующего излучения недостаточна для инспекции крупногабаритных (грузовые автомобили) объектов.
Заявленная группа изобретений свободна от указанных недостатков.
Высокопроизводительный досмотровый комплекс может быть построен лишь в том случае, если водитель не покидает кабины во время досмотра и область, подлежащая сканированию, определяется автоматически. Существующие методы определения начала области сканирования, основанные на оптических (лазерных) измерениях, обладают ограниченной областью применения.
Техническим результатом заявленной группы изобретений является:
- принципиальная возможность сохранения высокой производительности досмотрового комплекса для более широкого класса грузовых транспортных средств;
- расширение области досмотра инспектируемых объектов, включая груз, кабину водителя, пассажиров;
- повышение информативности изображений инспектируемых объектов;
- увеличение достоверности досмотра за счет повышения степени детализации изображений грузов.
Указанный технический результат является единым для всей группы заявленных изобретений.
Указанный технический результат достигается тем, что в системе досмотра грузов и транспортных средств, перемещающихся своим ходом, включая находящихся в транспортных средствах грузы, пассажиров и водителя, содержащей источник радиационного излучения с высокой проникающей способностью с коллиматором, устройство управления этим источником, портал с консолями и установленными на них детекторами, электронный тракт формирования и сбора сигналов с детекторов и соединенное с ним устройство формирования теневого изображения, лазерные сканеры, один из которых расположен от зоны излучения на расстоянии, не менее длины максимально допустимого порталом габарита инспектируемого объекта в направлении его движения, устройство управления источником радиационного излучения выполненное с использованием лазерных сканеров для определения части инспектируемого объекта, не подлежащей облучению, в соответствии с заявленным изобретением, перед порталом с консолями по ходу движения инспектируемого объекта дополнительно установлен источник радиационного излучения с меньшей проникающей способностью с механической разверткой пучка излучения по вертикали и детектирующей системой обратно рассеянного излучения.
Кроме того, указанный технический результат достигается тем, что источник радиационного излучения с меньшей проникающей способностью совместно с механической разверткой пучка этого источника имеют игольчатый пучок для сканирования по вертикали инспектируемого объекта.
Помимо этого, указанный технический результат достигается тем, что механическая развертка пучка источника радиационного излучения с меньшей проникающей способностью по вертикали имеет вращающийся коллиматор.
Вместе с тем, указанный технический результат достигается тем, что в качестве источника с высокой проникающей способностью использован импульсный источник рентгеновского излучения.
Кроме этого, указанный технический результат достигается тем, что в качестве импульсного источника рентгеновского излучения использован бетатрон.
Указанный технический результат достигается также способом автоматического радиоскопического контроля движущихся объектов и определения зоны радиационного сканирования в системе досмотра транспортных средств, перемещающихся своим ходом, включая находящихся в транспортных средствах грузы, пассажиров и водителя, заключающимся во включении источника излучения при въезде инспектируемого объекта в зону облучения и при прохождении его части, не подлежащей облучению, и выключении источника облучения при полном прохождении инспектируемого объекта зоны облучения, в котором, в соответствии с реализуемым на заявленной системе способом, начало и конец грузовой зоны инспектируемого объекта, подлежащей радиационному сканированию источником с высокой проникающей способностью, определяют при движении инспектируемого объекта в зоне сканирования источника с меньшей проникающей способностью по фиксированному в данный момент времени положению инспектируемого объекта, полученному от лазерных сканеров и по уменьшению плотности потока обратно рассеянного излучения источника радиационного излучения с меньшей проникающей способностью, ниже предварительно заданного уровня.
Указанный технический результат достигается также способом формирования изображения инспектируемого объекта в системе досмотра транспортных средств, перемещающихся своим ходом, включая находящихся в транспортных средствах грузы, пассажиров и водителя, заключающимся в формировании теневого изображения грузовой части инспектируемого объекта на основе числовой матрицы изображения, которая строится по данным системы детектирования излучения, и по данным о положении инспектируемого объекта, полученных от лазерных сканеров, которым, в соответствии с реализуемым на заявленной системе способом, дополнительно получают изображение инспектируемого объекта в обратно-рассеянном излучении путем формирования числовой матрицы изображения по данным системы детектирования рассеянного излучения и данным о положении инспектируемого объекта от лазерных сканеров.
Заявленная группа изобретений - система досмотра транспортных средств, перемещающихся своим ходом, включая находящихся в транспортных средствах грузы, пассажиров и водителя, способ автоматического радиоскопического контроля движущихся объектов и зоны радиационного сканирования и способ формирования теневого и обратно рассеянного изображения инспектируемого объекта, поясняется Фиг. 1-4.
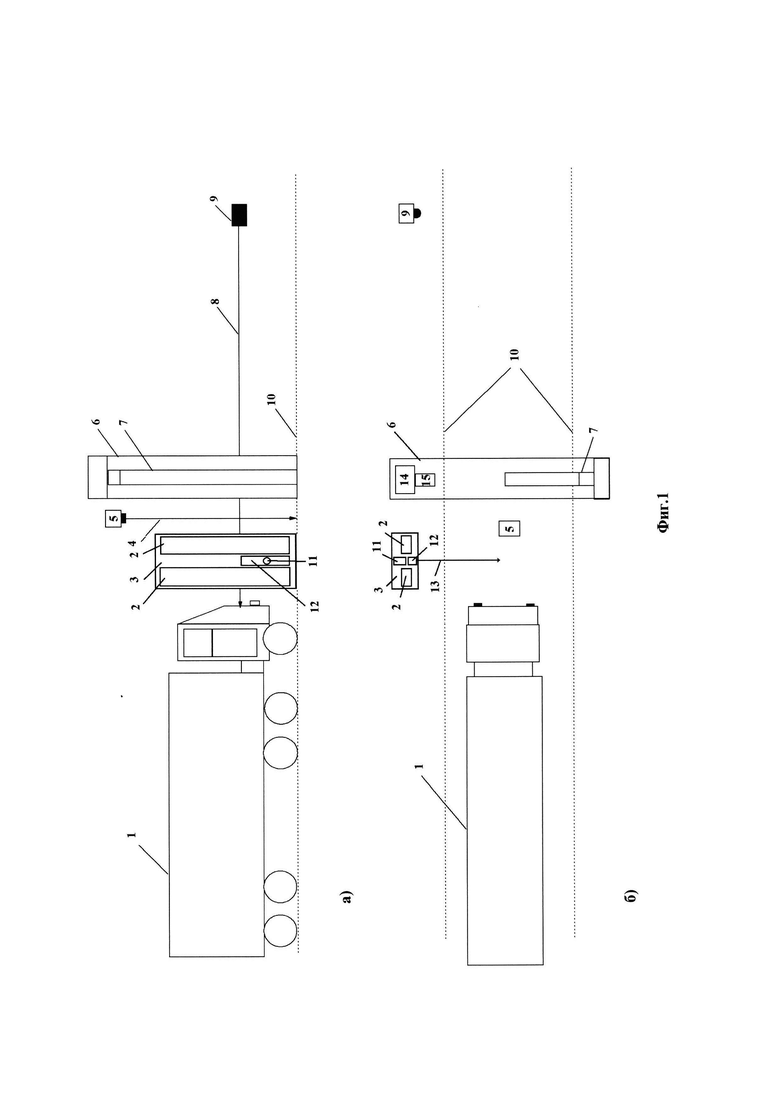
На Фиг. 1 представлено взаимное расположение основных элементов системы и положение инспектируемого объекта при его подъезде к зоне радиационного досмотра (Фиг. 1а - вид сбоку; Фиг. 1б - вид сверху). На Фиг. 1 представлена проездная трасса (10), по которой перемещается инспектируемый объект (1); источник радиационного излучения с высокой проникающей способностью (14) с коллиматором (15) и система детектирования (7), располагаются в корпусе (6); лазерный сканер (9) со сканированием луча в горизонтальной плоскости (8) установлен сбоку проездной трассы (10) на расстоянии от зоны излучения, превышающем максимально допустимый габарит инспектируемого объекта (1) в направлении движения, для обнаружения инспектируемого объекта (1) и его положения в процессе движения по проездной трассе (10); лазерный сканер (5) со сканированием в вертикальной плоскости (4), поперечной проездной трассе (10), установлен над проездной трассой в непосредственной близости от зоны облучения, для обнаружения части инспектируемого объекта (1) не подлежащей облучению; источник излучения с низкой проникающей способностью (11) с коллиматором (12) формирующим излучение с низкой проникающей способностью в направлении (13) перпендикулярном трассе (10) и системой детектирования излучения с низкой проникающей способностью (обратного рассеяния) (2) располагаются в корпусе (3) перед источником излучения с высокой проникающей способностью (14);
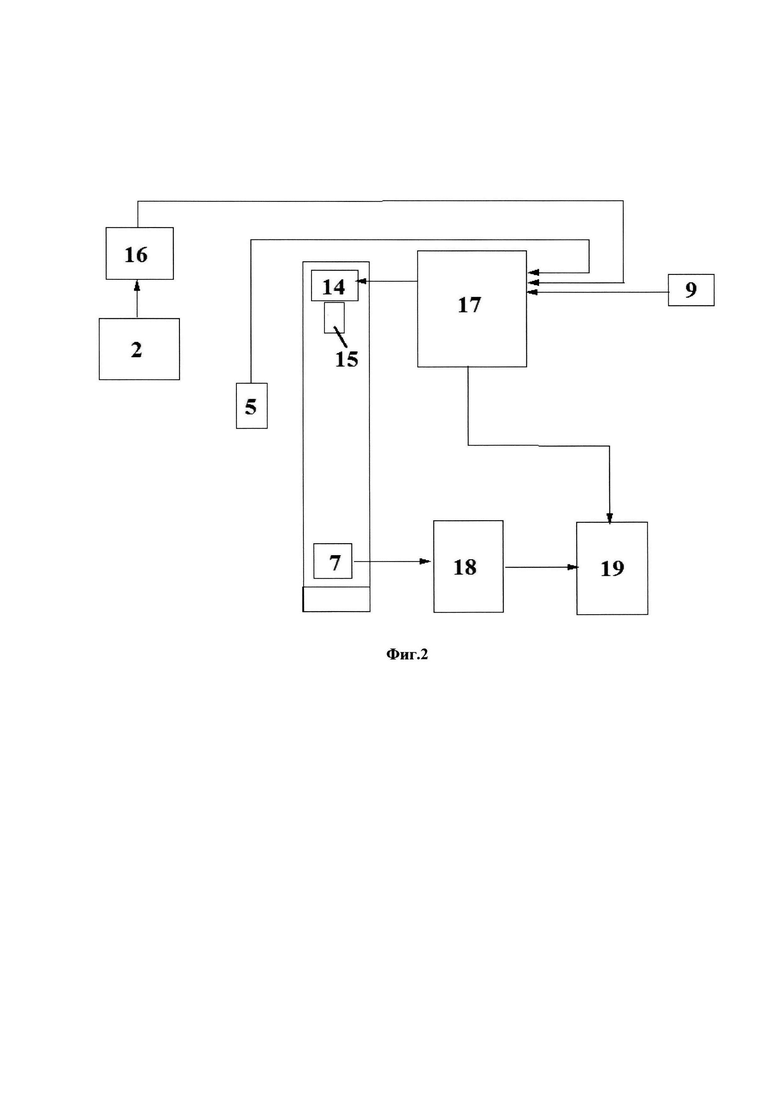
На Фиг. 2 представлена блок-схема взаимосвязи всех элементов системы, на которой показано соединение системы детектирования излучения с высокой проникающей способностью (7) с электронным трактом аналого-цифрового преобразователя (АЦП) (18) и его соединение с электронным устройством формирования теневого изображения (19); система детектирования излучения с низкой проникающей способностью (обратного рассеяния) (2) соединена с устройством формирования обратно рассеянного изображения (16), а также соединение контроллера (17) со всеми основными элементами системы.
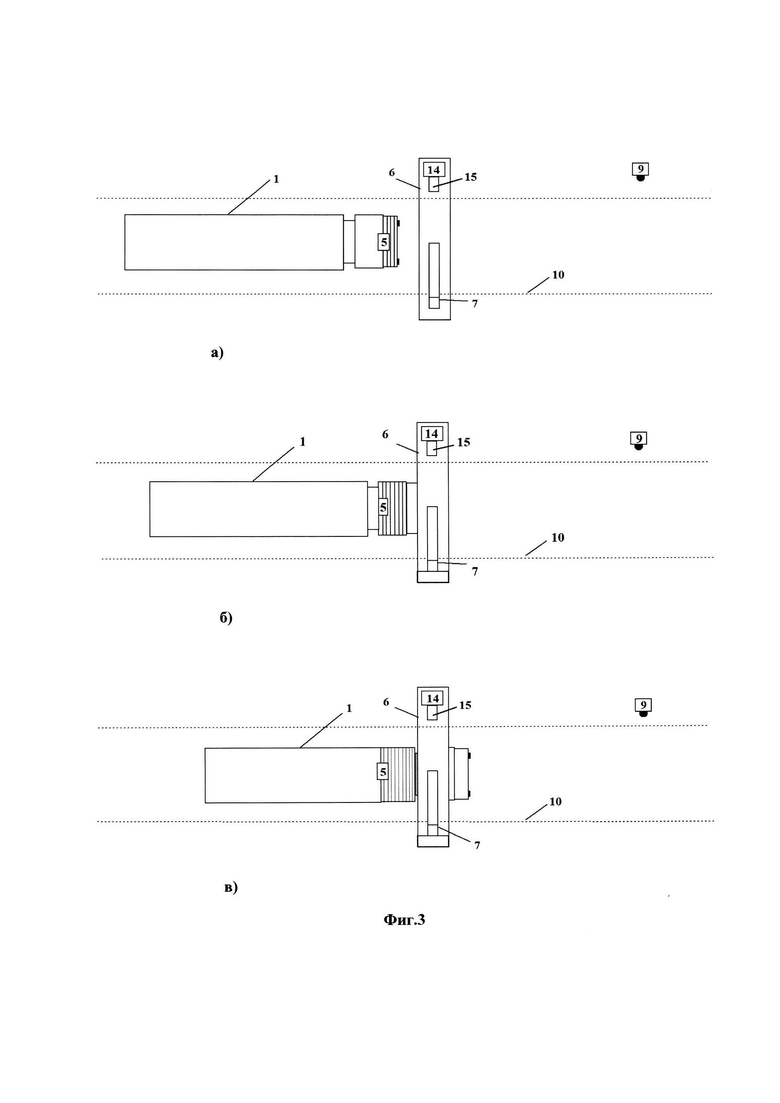
На Фиг. 3 показаны варианты положения инспектируемого объекта (1) относительно лазерного сканера со сканированием в вертикальной плоскости (5).
На Фиг. 4 приведены результаты моделирования интенсивности обратного рассеяния в зависимости от пути, пройденного автомобилем в зоне сканирования. Для иллюстрации практической осуществимости такого метода было выполнено численное моделирование.
Принцип работы системы заключается в формировании двух числовых матриц изображений - теневого изображения грузовой части инспектируемого объекта (1) и обратно рассеянного всего объекта (1). Теневое изображение грузовой части инспектируемого объекта (1) получается при его сканировании с использованием источника с высокой проникающей способностью (14). Обратно рассеянное изображение формируется при сканировании объекта (1) с использованием источника (11) с низкой проникающей способностью. Обнаружение начала грузовой части инспектируемого транспортного средства (1) производится автоматически двумя способами. Первый - по данным о положении инспектируемого объекта (1), полученным от лазерных сканеров (5 и 9), и второй - по анализу обратно рассеянного изображения. Рассмотрим подробно каждый из этих способов.
Обнаружение начала грузовой части транспортного средства с использованием лазерных сканеров (Система start/stop). Система start/stop служит для определения положения и скорости инспектируемого объекта (1), разрешенной зоны включения излучения источника (14) с высокой проникающей способностью. Система состоит из лазерных сканеров (5) и (9) и контроллера (17). Лазерный сканер (9) расположен сбоку от проездной трассы (10) после источников излучения (11 и 14) по направлению движения инспектируемого объекта (1), направлен в сторону въезда, навстречу инспектируемому объекту (1), на высоте 1.3-1.5 м. Плоскость сканирования (8) лазерного сканера (9) горизонтальна. Лазерный сканер (5) расположен на кронштейне верхней перекладины корпуса (6) прямо посередине проездной трассы (10), на расстоянии 800-900 мм от линии излучения источника с высокой проникающей способностью (14) в сторону въезда. Плоскость сканирования (4) лазерного сканера (5) направлена вертикально вниз и перпендикулярна траектории движения досматриваемого объекта (1). Скан лазерных сканеров (5) и (9) представляет собой совокупность векторов в одной плоскости в пределах от 0 до 180 градусов с дискретным шагом в 1 градус. Каждый вектор имеет длину (расстояние до точки отражения луча) и направление в плоскости сканирования в градусах. Каждый скан в виде массива данных о каждом векторе (точке скана) посредством телеграмм (для LMS фирмы "SICK" при угле сканирования 180 градусов размерность массива данных одного скана равно 720 байт) по интерфейсу RS-422 передаются лазерным сканером в контроллер (17), где происходит обработка и анализ этих данных.
Принцип работы системы start-stop состоит в определении и анализе положения, скорости и профиля по высоте досматриваемого объекта (1). В результате анализа контроллером (17) данных лазерного сканера (9) выдается значение скорости досматриваемого объекта (1) и сигнал разрешения включения источника излучения (14) с высокой проникающей способностью.
Для получения данных о положении и скорости досматриваемого объекта сканер (9) непрерывно сканирует зону проездной трассы (10) перед корпусом (6). При отсутствии объекта с характерным профилем система start-stop остается в ждущем режиме. При появлении в сканируемой зоне объекта (1), в контроллере (17) анализируется расстояние до характерных (например, крайних) точек получаемого профиля. По нескольким последовательным значениям расстояния вычисляется смещение досматриваемого объекта по траектории движения и его скорость на этом отрезке.
При определении с помощью сканера (9) наличия объекта на подъезде к линии сканирования, в контроллере (17) начинают анализироваться данные со сканера (5). По полученным данным можно судить о высоте объекта под сканером (5), и, при наличии зазора (100-150 мм), можно определить окончание кабины водителя и начало грузовой части досматриваемого объекта (1). На Фиг. 3 показаны положения досматриваемого объекта (1) для генерации сигнала контроллером (17) о разрешении включения излучения с высокой проникающей способностью: положение (а) - определение кабины, (б) - определение зазора и (с) - определение начала грузовой части. При определении окончания кабины, контроллер (17) выдает сигнал о разрешении включения излучения с высокой проникающей способностью, генерируемого источником (14). Также, по данным о высоте объекта определяется окончание грузовой части инспектируемого объекта (1) и выдается сигнал о запрещении выключения генерации излучения с высокой проникающей способностью. Сигнал о разрешении и запрещении включения излучения с высокой проникающей способностью также используются в системе сбора данных с детекторов (7) для формирования начала и конца изображения.
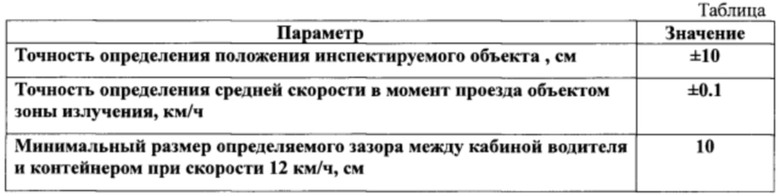
Точность определения положения инспектируемого объекта (1) и обнаружение зазора зависят от технических характеристик лазерных сканеров. Достигаемые параметры при использовании LMS фирмы "SICK" с частотой сканирования 50 Гц и дискретизацией по углу в один градус представлены в таблице.
Второй лазерный сканер (5) включается на сканирование только при обнаружении инспектируемого объекта (1) на проездной трассе (10) с помощью первого лазерного сканера (9). Работает он аналогично первому лазерному сканеру (9), получаемые данные лазерного сканирования передаются по интерфейсу RS-422 в контроллер (17).
Первичная обработка данных в контроллере (17) заключается в вычитании принимаемых данных из массива данных, соответствующего отсутствию инспектируемого объекта (1) в плоскости лазерного сканирования сканера (5). Таким образом, формируется профиль инспектируемого объекта (1) относительно земли, соответствующий данному скану. При отсутствии инспектируемого объекта (1) в плоскости (когда профиль равен нулю) дальнейшая обработка данных не производится, и контроллер (17) ждет данных следующего скана. При появлении инспектируемого объекта (1) (когда профиль отличен от нуля) контроллер (17) проводит первичную обработку для нескольких последующих сканов с целью подтверждения входа инспектируемого объекта (1) в зону лазерного сканирования. Если последующие сканирования подтвердили вход инспектируемого объекта (1), то в последующих данных контроллер (17) проводит анализ профиля инспектируемого объекта (1) на предмет выявления конца зоны, не подлежащей облучения. Используя известное значение расстояния между плоскостью лазерного сканирования и плоскостью облучения, контроллер (17) в дальнейшем определяет момент прохождения зазором плоскости облучения и выдает команду на включение источника радиационного излучения (14). После чего контроллер (17) продолжает обрабатывать данные лазерного сканера (5) с целью определения момента полного прохождения инспектируемым объектом (1) зоны облучения и выработки команды на выключение источника радиационного излучения (14). Алгоритм в данном случае аналогичен описанному выше. Возможен также алгоритм вырабатывающий команду выключения источника излучения без использования лазерного сканера на основе только данных о положении объекта.
Алгоритм формирования теневого изображения, позволяет учесть неравномерность движения инспектируемого объекта (1) в процессе радиационного сканирования. Это достигается тем, что при построении теневого изображения используются данные о положении инспектируемого объекта (1) относительно плоскости облучения в процессе его сканирования. В процессе радиационного сканирования, начинающегося с момента включения источника радиационного излучения (14), электронное устройство формирования теневого изображения (19) принимает и буферизует данные от системы детектирования (7) по электронному тракту АЦП (18) и контроллера (17). После окончания радиационного сканирования устройство формирования теневого изображения (19) производит обработку полученных данных и формирует теневое изображения в виде числовой матрицы.
Обработка данных основывается на том факте, что данные, поступающие в электронную систему формирования изображения (19) имеют временную привязку, определяемую частотами радиационного и лазерного сканирований. Таким образом, данные радиационных сканирований (последовательность массивов оцифрованных откликов детекторов) по времени разделены по времени между собой одинаковым промежутком времени, определенным заданной частотой радиационного сканирования. Это позволяет для каждого детектора построить зависимость его отклика от времени, начиная с момента начала радиационного сканирования.
Аналогично, может быть построена временная зависимость положения инспектируемого объекта (1), исходя из частоты лазерного сканирования, на основе которой строится обратная зависимость - время от положения инспектируемого объекта (1), начиная с момента начала радиационного сканирования. При этом могут быть использованы процедуры сглаживания и интерполяции данных. Результаты такой обработки сводят в таблицу, в которой каждому перемещению инспектируемого объекта (1) на заданное фиксированное расстояние соответствует временная координата. Далее с помощью этой таблицы, используя методы интерполяции, преобразуют данные откликов детекторов. Для каждого детектора строится новый массив данных, в которых отклик соответствует заданному фиксированному перемещению объекта. Совокупность, преобразованных данных откликов детекторов, формирует числовую матрицу теневого изображения. Описанный алгоритм реализуется электронной системой формирования теневого изображения (19).
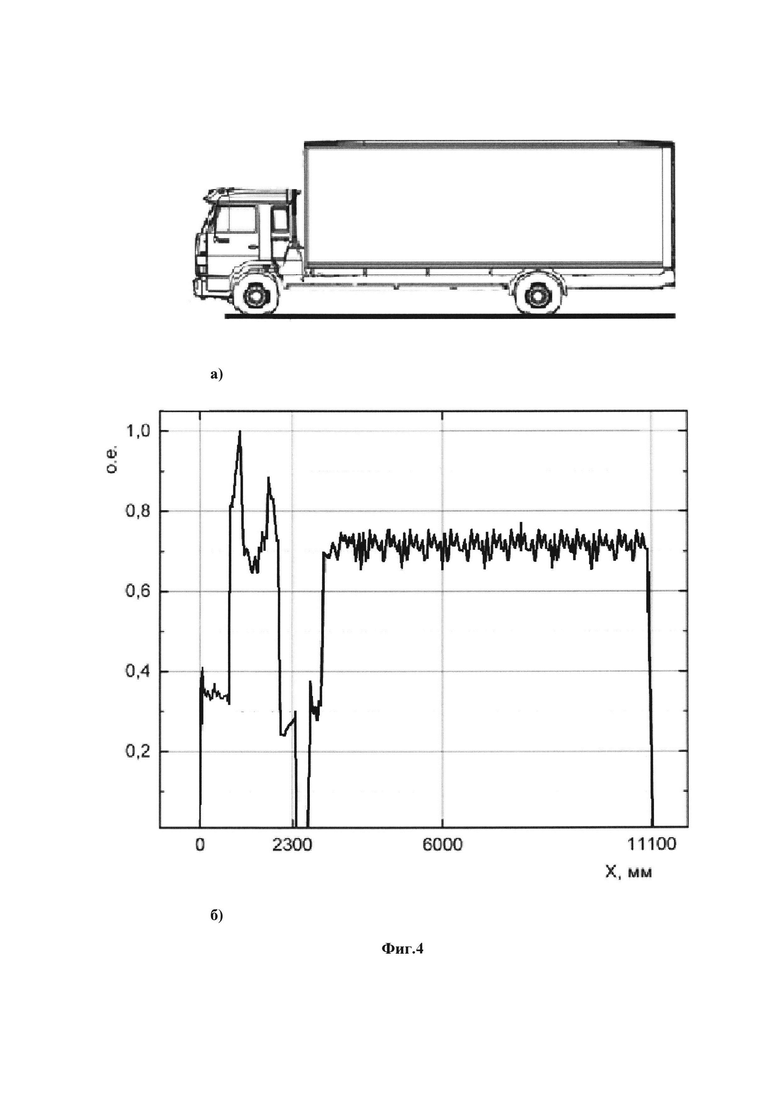
Дополнительным и независимым каналом обнаружения грузовой части инспектируемого объекта (1) является канал регистрации обратно рассеянного излучения, генерируемого источником с низкой проникающей способностью (11) и формируемым коллиматором (12). Обратно рассеянное от инспектируемого объекта (1) излучение регистрируется системой детектирования (2) и передается в систему формирования обратно-рассеянного изображения (16), которое направляется для анализа в контроллер (17). Анализ обратно-рассеянного изображения (16) на предмет обнаружения зазора и конца объекта исследования (1) происходит в контроллере (17), который при обнаружении зазора посылает сигнал источнику ионизирующего излучения с высокой проникающей способностью (14) на включение. Выключение источника ионизирующего излучения (14) происходит после получения сигнала с контроллера (17) об обнаружении конца объекта исследования (1). Алгоритм обнаружения зазора и конца исследуемого объекта (1) основывается на анализе суммарного сигнала с детекторной системы (2) регистрирующей обратно рассеянное излучение. Основным критерием определения зазора между кабиной и контейнером и конца контейнера служит резкое уменьшение уровня суммарного сигнала. Для иллюстрации практической осуществимости такого алгоритма было выполнено численное моделирование. На Фиг. 4а представлена модель КАМАЗА используемая для моделирования в качестве инспектируемого транспортного средства. В качестве детекторов обратного рассеивания (2) используются две сцинтилляционные панели размером 40×5000 мм каждая, расстояние между панелями 40,0 мм. Через щель между детекторными панелями проходит коллимированный пучок рентгеновского излучения (13). Детекторы регистрируют энергию и координату входа обратно-рассеянного фотона в детектор, далее этот фотон считается поглотившимся в детекторе и не отслеживается. Разбиение детектора на ячейки, подсчет энергии и числа фотонов в каждой из ячеек проводится уже после моделирования в процессе постобработки результатов.
На Фиг. 4б приведен уровень сигнала с детекторных панелей (2) обратно рассеянного излучения при перемещении инспектируемого объекта (1), с детекторов обратного рассеяния (2) в диапазоне 1000-3500 мм по высоте. По полученным в ходе моделирования результатам можно сделать следующие выводы:
- предлагается использовать для определения зазора между кабиной и контейнером суммарный сигнал с детекторной линейки, регистрирующей обратно рассеянное излучение;
- в случае прохождения объекта уровень сигнала будет увеличиваться, далее при прохождении кабины исследуемого объекта (1) и появлении в области видимости зазора, суммарный сигнал будет резко уменьшаться;
- основным критерием определения зазора между кабиной и контейнером служит уменьшение уровня суммарного сигнала 10-20% от максимального значения суммарного сигнала.
- возможность использовать суммарный сигнал не со всей линейки, а с некоторого диапазона, который определяется геометрическими параметрами объекта (размерами грузовика).
Таким образом, используя два независимых канала обнаружения зоны облучения исследуемого объекта, повышаем достоверность и безопасность досмотра. Кроме этого, дополнительно в результате досмотра получается два изображения досматриваемого объекта. Первое - теневое изображение прошедшего излучения контейнера исследуемого объекта и второе - обратно рассеянное изображение всего объекта.
Технико-экономическая эффективность заявленной группы изобретений состоит в повышении быстродействия и пропускной способности системы, а также повышении безопасности, надежности и точности досмотра инспектируемых объектов за счет нового конструктивного исполнения системы, и реализуемых на ее основе двух независимых способов досмотра.
Список использованной литературы
1. Патент РФ №2284511
2. Патент US 8457275 B2
3. Патент US 7688945 B2
4. Патент RU 2430424
5. Патент US 9835756
6. Патент RU 2418291 С2
7. Патент US 9057679 В2 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДОСМОТРА ГРУЗОВ И ТРАНСПОРТНЫХ СРЕДСТВ, ПЕРЕМЕЩАЮЩИХСЯ СВОИМ ХОДОМ, СПОСОБ АВТОМАТИЧЕСКОГО РАДИОСКОПИЧЕСКОГО КОНТРОЛЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ЗОНЫ РАДИАЦИОННОГО СКАНИРОВАНИЯ И СПОСОБ ФОРМИРОВАНИЯ ТЕНЕВОГО ИЗОБРАЖЕНИЯ ИНСПЕКТИРУЕМОГО ОБЪЕКТА | 2010 |
|
RU2430424C1 |
| Система досмотра грузов и транспортных средств, перемещающихся своим ходом, и способ автоматического радиоскопического контроля движущихся объектов для определения зоны радиационного сканирования в системе досмотра | 2017 |
|
RU2668508C1 |
| СПОСОБ И СИСТЕМА ДОСМОТРА АВТОМОБИЛЬНОГО И ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА БЕЗ ПРОНИКНОВЕНИЯ ВНУТРЬ ГРУЗОВОГО ПРОСТРАНСТВА | 2013 |
|
RU2610930C2 |
| УСТРОЙСТВО И СПОСОБ ДОСМОТРА ОБЪЕКТОВ | 2005 |
|
RU2444723C2 |
| СПОСОБ И СИСТЕМА БЫСТРОГО ДОСМОТРА ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2632582C1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДОСМОТРА ОБЪЕКТА | 2006 |
|
RU2418291C2 |
| Способ определения пространственного профиля инспектируемого объекта | 2022 |
|
RU2790794C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИСТОЧНИКОМ ИЗЛУЧЕНИЯ, УСТАНОВКА И СПОСОБ РАДИАЦИОННОГО КОНТРОЛЯ | 2006 |
|
RU2383883C2 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ОБЪЕКТА ПРОВЕРКИ | 2003 |
|
RU2334219C2 |
| УСТАНАВЛИВАЕМАЯ НА ТРАНСПОРТНОМ СРЕДСТВЕ СИСТЕМА БЫСТРОЙ ПРОВЕРКИ | 2015 |
|
RU2624975C2 |
Использование: для досмотра транспортных средств. Сущность изобретения заключается в том, что система досмотра транспортных средств, перемещающихся своим ходом, включая находящихся в транспортных средствах грузы, пассажиров и водителя, содержит источник радиационного излучения с высокой проникающей способностью с коллиматором, устройство управления источником радиационного излучения, портал с консолями и установленными на них детекторами излучения и расположенными на стороне портала, противоположной источнику радиационного излучения, электронный тракт формирования и сбора сигналов с детекторов, и соединенное с ним устройство формирования теневого изображения, устройство управления источником радиационного излучения выполнено с использованием лазерных сканеров, один из которых расположен от зоны излучения на расстоянии не менее длины максимально допустимого порталом габарита инспектируемого объекта в направлении его движения и с разверткой луча в горизонтальной плоскости, другой лазерный сканер размещен в непосредственной близости от зоны облучения и с разверткой луча в вертикальной плоскости, соединенного с лазерными сканерами контроллера положения инспектируемого объекта по отношению к зоне облучения, определения части инспектируемого объекта, не подлежащей облучению, при этом перед порталом с консолями по ходу движения инспектируемого объекта дополнительно установлен источник радиационного излучения с меньшей проникающей способностью с механической разверткой пучка излучения по вертикали и детектирующей системой обратно рассеянного излучения. Технический результат: обеспечение возможности высокой производительности досмотрового комплекса для широкого класса грузовых транспортных средств, расширение области досмотра инспектируемых объектов, включая груз, кабину водителя, пассажиров, повышение информативности изображений инспектируемых объектов, а также увеличение достоверности досмотра за счет повышения степени детализации изображений грузов. 2 н. и 4 з.п. ф-лы, 4 ил.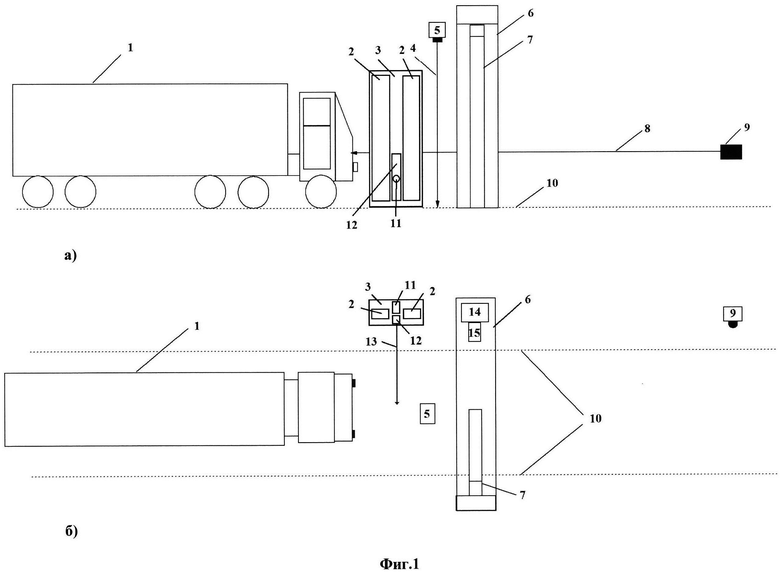
1. Система досмотра транспортных средств, перемещающихся своим ходом, включая находящихся в транспортных средствах грузы, пассажиров и водителя, содержащая источник радиационного излучения с высокой проникающей способностью с коллиматором, устройство управления источником радиационного излучения, портал с консолями и установленными на них детекторами излучения и расположенными на стороне портала, противоположной источнику радиационного излучения, электронный тракт формирования и сбора сигналов с детекторов, и соединенное с ним устройство формирования теневого изображения, устройство управления источником радиационного излучения выполнено с использованием лазерных сканеров, один из которых расположен от зоны излучения на расстоянии не менее длины максимально допустимого порталом габарита инспектируемого объекта в направлении его движения и с разверткой луча в горизонтальной плоскости, другой лазерный сканер размещен в непосредственной близости от зоны облучения и с разверткой луча в вертикальной плоскости, соединенного с лазерными сканерами контроллера положения инспектируемого объекта по отношению к зоне облучения, определения части инспектируемого объекта, не подлежащей облучению, отличающаяся тем, что перед порталом с консолями по ходу движения инспектируемого объекта дополнительно установлен источник радиационного излучения с меньшей проникающей способностью с механической разверткой пучка излучения по вертикали и детектирующей системой обратно рассеянного излучения.
2. Система по п. 1, отличающая тем, что источник радиационного излучения с меньшей проникающей способностью совместно с механической разверткой пучка этого источника имеют игольчатый пучок для сканирования по вертикали инспектируемого объекта.
3. Система по п. 1, отличающая тем, что механическая развертка пучка источника радиационного излучения с меньшей проникающей способностью по вертикали снабжена вращающимся коллиматором.
4. Система по п. 1, отличающая тем, что в качестве источника с высокой проникающей способностью использован импульсный источник рентгеновского излучения.
5. Система по п. 4, отличающая тем, что в качестве импульсного источника рентгеновского излучения использован бетатрон.
6. Способ автоматического радиоскопического контроля движущихся объектов и определения зоны радиационного сканирования в системе досмотра транспортных средств по п. 1, заключающийся во включении источника излучения при въезде инспектируемого объекта в зону облучения и при прохождении его части, не подлежащей облучению, и выключении источника облучения при полном прохождении инспектируемого объекта зоны облучения, отличающийся тем, что начало и конец грузовой зоны инспектируемого объекта, подлежащей радиационному сканированию источником с высокой проникающей способностью, определяют при движении инспектируемого объекта в зоне сканирования источника с меньшей проникающей способностью по фиксированному в данный момент времени положению инспектируемого объекта, полученному от лазерных сканеров, и по уменьшению плотности потока обратно рассеянного излучения источника радиационного излучения с меньшей проникающей способностью, ниже предварительно заданного уровня.
| US 9057679 B2, 16.06.2015 | |||
| СИСТЕМА ДОСМОТРА ГРУЗОВ И ТРАНСПОРТНЫХ СРЕДСТВ, ПЕРЕМЕЩАЮЩИХСЯ СВОИМ ХОДОМ, СПОСОБ АВТОМАТИЧЕСКОГО РАДИОСКОПИЧЕСКОГО КОНТРОЛЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ЗОНЫ РАДИАЦИОННОГО СКАНИРОВАНИЯ И СПОСОБ ФОРМИРОВАНИЯ ТЕНЕВОГО ИЗОБРАЖЕНИЯ ИНСПЕКТИРУЕМОГО ОБЪЕКТА | 2010 |
|
RU2430424C1 |
| СИСТЕМА ПРОВЕРКИ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПУТЕМ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И СПОСОБ ВЫБОРОЧНОЙ ЗАЩИТЫ | 2006 |
|
RU2390007C2 |
| US 7039159 B2, 02.05.2006 | |||
| US 2004086078 A1, 06.05.2004. | |||

