Изобретение относится к системам управления насосным оборудованием и может использоваться при автоматизации технологических процессов для управления насосным агрегатом при перекачке жидкости.
Известна система управления насосным агрегатом (патент РФ №2181829, МПК E21B 43/00, F04D 13/10, опубл. 27.04.2002), содержащая блок задания параметра регулирования, выход которого соединен с первым входом блока сравнения, второй вход которого соединен с выходом датчика регулируемого параметра, выход центробежного насоса соединен с датчиком регулируемого параметра.
Недостатком такой системы является невысокое качество регулирования на установившихся режимах работы.
Наиболее близким к изобретению по технической сущности является система управления электроцентробежным насосом для вывода нефтяной скважины на стационарный режим работы (патент РФ №2341004, МПК Н02Р 7/06, F04D 13/08, E21B 43/00, опубл. 10.12.2008), содержащая блок задания параметра регулирования, выход которого соединен с первым входом блока сравнения, выход блока сравнения соединен с входом сумматора, второй вход которого соединен с выходом блока дифференцирования, вход которого соединен с выходом блока задания параметра регулирования, выход центробежного насоса соединен с датчиком регулируемого параметра.
Существенным недостатком ближайшего аналога является невысокая динамическая и статическая точность регулирования на установившихся режимах, обусловленная тем, что в системе отсутствует учет влияния изменения скорости вращающихся инерционных масс приводного электродвигателя при формировании управляющего воздействия.
Задача изобретения - повышение качества регулирования путем увеличения динамической и статической точности управления центробежным насосом на установившихся и переходных режимах.
Технический результат достигается тем, что в системе управления центробежным насосом, содержащей блок задания параметра регулирования, выход которого соединен с первым входом блока сравнения, выход центробежного насоса соединен с датчиком регулируемого параметра, датчик регулируемого параметра, сумматор, блок дифференцирования, согласно изобретению второй вход блока сравнения соединен с выходом сумматора, блок интегрирования присоединен к выходу блока сравнения, выход блока интегрирования соединен с входом асинхронного электродвигателя, выход которого соединен с входом центробежного насоса, асинхронный электродвигатель соединен с датчиком частоты вращения, выход которого соединен со вторым блоком дифференцирования, выход которого соединен с первым входом сумматора, датчик регулируемого параметра соединен с входом блока дифференцирования, выход которого соединен с вторым входом сумматора, третий вход которого соединен с выходом датчика регулируемого параметра.
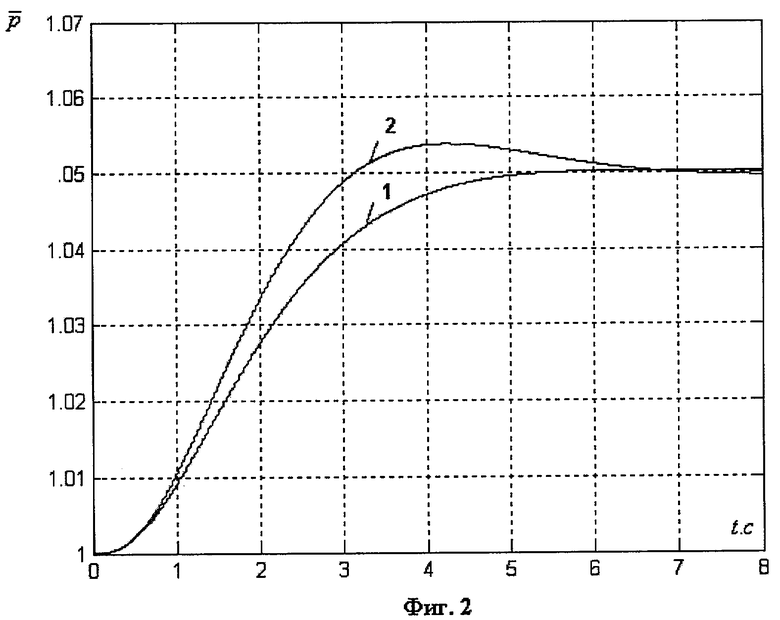
Сущность заявляемого изобретения поясняется чертежами. На фиг.1 представлена функциональная схема системы управления центробежным насосом. На фиг.2 представлены графики изменения параметра регулирования.
Система управления (фиг.1) центробежным насосом содержит блок 1 задания параметра регулирования, выход которого соединен с первым входом блока 2 сравнения, сумматор 6, блок 9 дифференцирования. Выход центробежного насоса 5 соединен с датчиком 10 регулируемого параметра. Второй вход блока 2 сравнения соединен с выходом сумматора 6. Блок 3 интегрирования присоединен к выходу блока 2 сравнения. Выход блока 3 интегрирования соединен с входом асинхронного электродвигателя 4, выход которого соединен с входом центробежного насоса 5. Асинхронный электродвигатель 4 соединен с датчиком 8 частоты вращения, выход которого соединен со вторым блоком 7 дифференцирования, выход которого соединен с первым входом сумматора 6. Датчик 10 регулируемого параметра соединен с входом блока 9 дифференцирования, выход которого соединен со вторым входом сумматора 6. Третий вход сумматора 6 соединен с выходом датчика 10 регулируемого параметра.
Блок 1 задания регулируемого параметра, блок 2 сравнения, блок 3 интегрирования, сумматор 6, блоки 7, 9 дифференцирования могут быть реализованы, например, программно, например, на микропроцессорном контроллере SLC 500. В качестве датчика 10 регулируемого параметра может использоваться, например, датчик давления Метран-100. В качестве датчика 8 регулируемого параметра может использоваться, например, датчик частоты вращения ДЧВ-2500. В качестве центробежного насоса 5 может использоваться насос ГДМ-04-Е-60/440-К-160-У2 с частотно-регулируемым приводом Altivar.
Предлагаемая система управления центробежным насосом работает следующим образом. При изменении величины и характера нагрузки насоса изменяется значение выходного сигнала датчика 10 регулируемого параметра, которое дифференцируется и поступает на сумматор 6, где складывается с сигналом, поступающим с датчика 10 регулируемого параметра, а также с дифференцированным значением частоты вращения асинхронного электродвигателя 4. Одновременно значение заданного параметра поступает на блок 2 сравнения, откуда полученная разность поступает на блок 3 интегрирования, и управляющее воздействие в виде измененной мощности подается на электродвигатель 4 центробежного насоса 5, вызывая изменение его производительности таким образом, что рассогласование между заданным значением регулируемого параметра и измеренным уменьшается.
На Фиг.2 показано изменение регулируемого параметра (относительного давления на выходе центробежного насоса) при изменении задания параметра регулирования на 5%. График переходного процесса 1 относится к изобретению с включенным в контур управления дифференцированием частоты вращения электродвигателя и интегратором. График переходного процесса 2 относится к известной модели без учета скорости изменения частоты вращения электродвигателя и интегратора. Как видно из сравнения переходных процессов, заявляемая система обеспечивает более высокое качество переходных процессов по сравнению с известной системой.
Технический результат достигается тем, что при формировании управляющего сигнала в отличие от прототипа учитываются скорость изменения регулируемого параметра и скорость изменения частоты вращения вала электропривода. Введение в систему управления этой информации позволяет повысить качество управления (динамическую точность) системы управления. Кроме того, в отличие от известной системы, в систему управления введен интегратор, что позволяет обеспечить более высокую статическую точность регулирования.
Таким образом, учет скорости изменения частоты вращения электродвигателя насосного агрегата и интегрирование сигнала управления позволяют обеспечить монотонность переходных процессов, что повышает динамическую точность регулирования, а также надежность и ресурс этого оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЦЕНТРОБЕЖНЫМ НАСОСОМ | 2021 |
|
RU2770528C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЦЕНТРОБЕЖНЫМ НАСОСОМ | 2012 |
|
RU2511934C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЦЕНТРОБЕЖНЫМ НАСОСОМ | 2014 |
|
RU2575232C1 |
| СИСТЕМА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ТУРБОАГРЕГАТОМ | 2012 |
|
RU2498115C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТУРБОАГРЕГАТОМ | 2012 |
|
RU2493437C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТУРБОАГРЕГАТОМ | 2012 |
|
RU2498116C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ С ПОГРУЖНЫМ ЦЕНТРОБЕЖНЫМ НАСОСОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2165037C2 |
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2580823C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2008 |
|
RU2370673C1 |
Изобретение относится к системам управления насосным оборудованием и может использоваться при автоматизации технологических процессов. Система управления центробежным насосом содержит блок 1 задания параметра регулирования, выход которого соединен с первым входом блока 2 сравнения, сумматор 6, блок 9 дифференцирования. Выход центробежного насоса 5 соединен с датчиком 10 регулируемого параметра. Второй вход блока 2 сравнения соединен с выходом сумматора 6. Блок 3 интегрирования присоединен к выходу блока 2 сравнения. Выход блока 3 интегрирования соединен с входом асинхронного электродвигателя 4, выход которого соединен с входом центробежного насоса 5. Асинхронный электродвигатель 4 соединен с датчиком 8 частоты вращения, выход которого соединен со вторым блоком 7 дифференцирования, выход которого соединен с первым входом сумматора 6. Датчик 10 регулируемого параметра соединен с входом блока 9 дифференцирования, выход которого соединен со вторым входом сумматора 6. Третий вход сумматора 6 соединен с выходом датчика 10 регулируемого параметра. Изобретение направлено на повышение точности системы управления центробежным насосом на установившихся режимах за счет включения в контур регулирования обратной связи по частоте вращения электродвигателя насоса. 2 ил.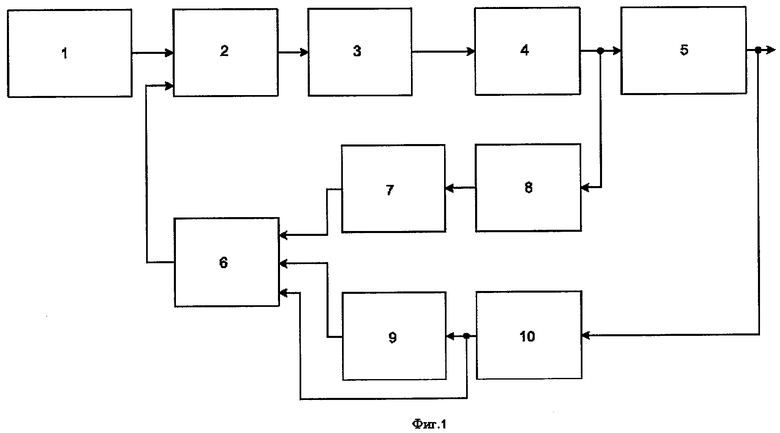
Система управления центробежным насосом, содержащая блок задания параметра регулирования, выход которого соединен с первым входом блока сравнения, выход центробежного насоса соединен с датчиком регулируемого параметра, датчик регулируемого параметра, сумматор, блок дифференцирования, отличающаяся тем, что второй вход блока сравнения соединен с выходом сумматора, блок интегрирования присоединен к выходу блока сравнения, выход блока интегрирования соединен с входом асинхронного электродвигателя, выход которого соединен с входом центробежного насоса, асинхронный электродвигатель соединен с датчиком частоты вращения, выход которого соединен с вторым блоком дифференцирования, выход которого соединен с первым входом сумматора, датчик регулируемого параметра соединен с входом блока дифференцирования, выход которого соединен с вторым входом сумматора, третий вход которого соединен с выходом датчика регулируемого параметра.
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2007 |
|
RU2341004C1 |
| СПОСОБ ВЫВОДА СКВАЖИНЫ, ОБОРУДОВАННОЙ УСТАНОВКОЙ ЭЛЕКТРОЦЕНТРОБЕЖНОГО НАСОСА С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ, НА СТАЦИОНАРНЫЙ РЕЖИМ РАБОТЫ | 2000 |
|
RU2181829C2 |
| US 5844397 A, 01.12.1998 | |||
| WO 2008073436 A2, 19.06.2008. | |||

