(54) ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемый асинхронный электропривод | 1981 |
|
SU955483A1 |
| Частотно-регулируемый электропривод | 1978 |
|
SU904174A1 |
| Способ управления асинхронным электродвигателем с частотно-импульсным регулированием напряжения | 1988 |
|
SU1653122A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866679A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866681A1 |
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072230A1 |
| Частотно-регулируемый асинхронный электропривод | 1983 |
|
SU1119155A1 |
| Электропривод переменного тока | 1985 |
|
SU1314428A1 |
| Устройство для управления электроприводомпЕРЕМЕННОгО TOKA | 1979 |
|
SU851718A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЦИФРОВЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2013 |
|
RU2543970C1 |
1
Изобретение относится к электротехнике и может быть использовано в тиристорном электроприводе, содержащем асинхронный короткозамкнутый двигатель и преобразователь частоты.
Известны частотно-регулируемые электроприводы, содержащие асинхронный двигатель с датчиком частоты вращения, регулятором частоты вращения, обеспечивающим обработку заданной величины частоты вращения путем управления моментом двигателя. Управление моментом асинхронного короткозамкнутого двигателя осуществляется путем связ.анного регулирования амплитуды и частоты тока статора в функции выходного сигнала регулятора скорости. Ток по амплитуде и частоте формируется преобразователем частоты 1.
Наиболее близким к предлагаемому является частотно-регулируемый электропривод, содержащий асинхронный короткозамкнутый Двигатель с импульсным датчиком частоты вращения на валу, подключенный к преобразователю частоты, регулятор частоты вращения, соединенный по входу через блок сравнения и преобразователь частотанапряжение с импульсным датчиком частоты вращения, а выход регулятора частоты вращения соединен со входом первого функционального преобразователя, выход которого соединен с задающим входом замкнутой системы автоматического регулирования амплитуды тока двигателя, со входом второго функционального преобразователя, с блоком преобразования напряжения в частоту, выход которого соединен с первым--входом первого блока суммирования, второй вход которого соединен с выходом импульсного датчика частоты вращения, а выход первого блока суммирования через второй блок суммирования соединен с блоком управления частотой преобразователя 2.
Управление тиристорным преобразователем частоты осуществляется следующим образом. На входе регулятора частоты вращения сравниваются сигналы задания и выходной сигнал преобразователя частота-напряжение, который входом соединен с импульсным датчиком на валу двигателя. Выходной сигнал регулятора скорости поступает: 1) на вход первого функционального преобразователя, выход которого подается на вход замкнутой системы автоматического регулирования тока выпрямит.;, 2) на вход преобразователя напряжение-частота скольжения, импульсы частоты вращения в первом суммирующем узле суммируются алгебраически (т. е. могут складываться или вычитаться в зависимости от знака сигНала на выходе регулятора частоты вращения) с импульсами датчика на валу двигателя; 3) на вход второго функционального преобразователя, выход которого подается на блок преобразования производной входного сигнала в частоту импульсов. Эти импульсы суммируются алгебраически во втором сумматоре с выходными импульсами первого сумматора. Выходные импульсы второго сумматора используются для управления частотой инвертора. Однако данный электропривод имеет повышенную сложность, так как использует два преобразователя напряжение-частота, сумматоры импульсов первый и второй должны осуществлять операции как сложения, так и вычитания импульсов и низкое быстродействие преобразователя напряжение-частота скольжения.
Такие преобразователи, как правило выполняются на принципе интегрирования входного сигнала до значения, определяемого установкой. Указанный преобразователь является нелинейным импульсным звеном, его предельная частота пропускания при линеаризации определяется текущей частотой преобразователя, т. е. в режиме холостого хода (нулевой частоте скольжения) быстродействие отработки скольжения очень низкое.
Низкое качество регулирования, которое объясняется тем, что система является полностью параметрической, и при изменении, допустим, температуры обмотки ротора двигателя или насыщении магнитной системы при изменении момента, нарушается установленное соотношение между амплитудой тока статора и частотой скольжения, что приводит в одних случаях к насыщению двигателя и повышенным потерям, в других случаях - к снижению предельного момента.
Цель изобретения - упрощение устройства, повышение его быстродействия, обеспечение стабильности статических регулировочных характеристик при изменении параментров двигателя, улучшение динамических характеристик двигателя за счет стабилизации потока в переходных режимах при использовании преобразователей частоты на основе автономных инверторов с двухступенчатой принудительной коммутацией, в частности, инверторов с отсекающими диодами.
Для достижения указанной цели в частотно-регулируемый электропривод, содержащий асинхронный короткозамкнутый двигатель с импульсным датчиком частоты вращения на валу, подключенный к преобразователю частоты, регулятор частоты вращения, соединенный по входу через блок сравнерования, вход которого соединен с выходом второго функционального преобразователя, а выход третьего блока суммирования подсоедлнен к входу блока преобразования напря жения в частоту, причем выход генератора стабильной частоты соединен со вторым входом второго блока суммирования.
Кроме того, в описанный выше частотно-регулируемый электронривод введены
Q датчик ЭДС двигателя, четвертый, пятый и шестой блоки суммирования, регулятор ЭДС, при этом первый вход четвертого блока суммирования подсоединен к выходу регулятора частоты вращения, второй вход его подсоединен к выходу преобразователя частота-на5 пряжение, выход четвертого блока суммирования подсоединен к первому входу пятого блока суммирования, второй вход которого соединен к датчику ЭДС, выход пятого блока суммирования подсоединен ко входу регулятора ЭДС, выход которого подсоединен с первым входом шестого блока суммирования, второй вход которого соединен с выходом первого функционального преобразователя, а выход шестого блока суммирования соединен с задающим входом системы автоматического регулирования амплитуды тока двигателя.
Отличием частотно-регулируемого электропривода является наличие блока деления, третьего функционального преобразователя
0 и седьмого блока суммирования, при этом вход делимого блока деления соединен с выходом шестого блока суммирования, вход делителя блока деления соединен с выходом четвертого блока суммирования, выход блока деления соединен со входом третьего
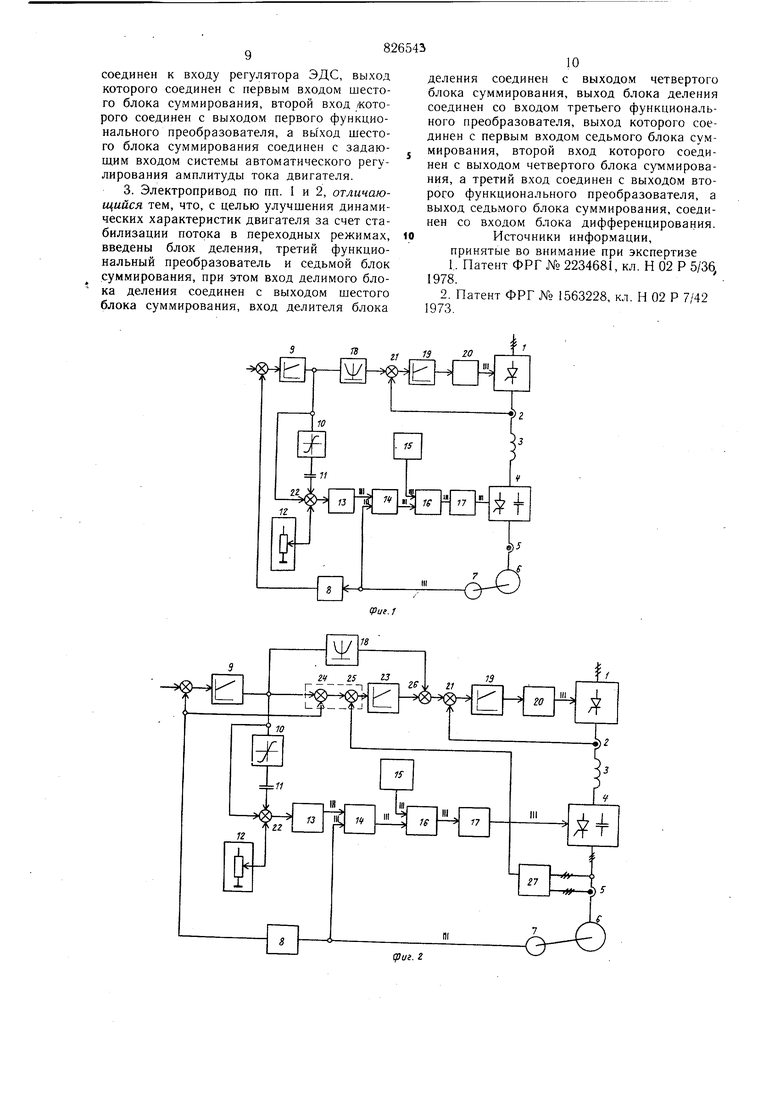
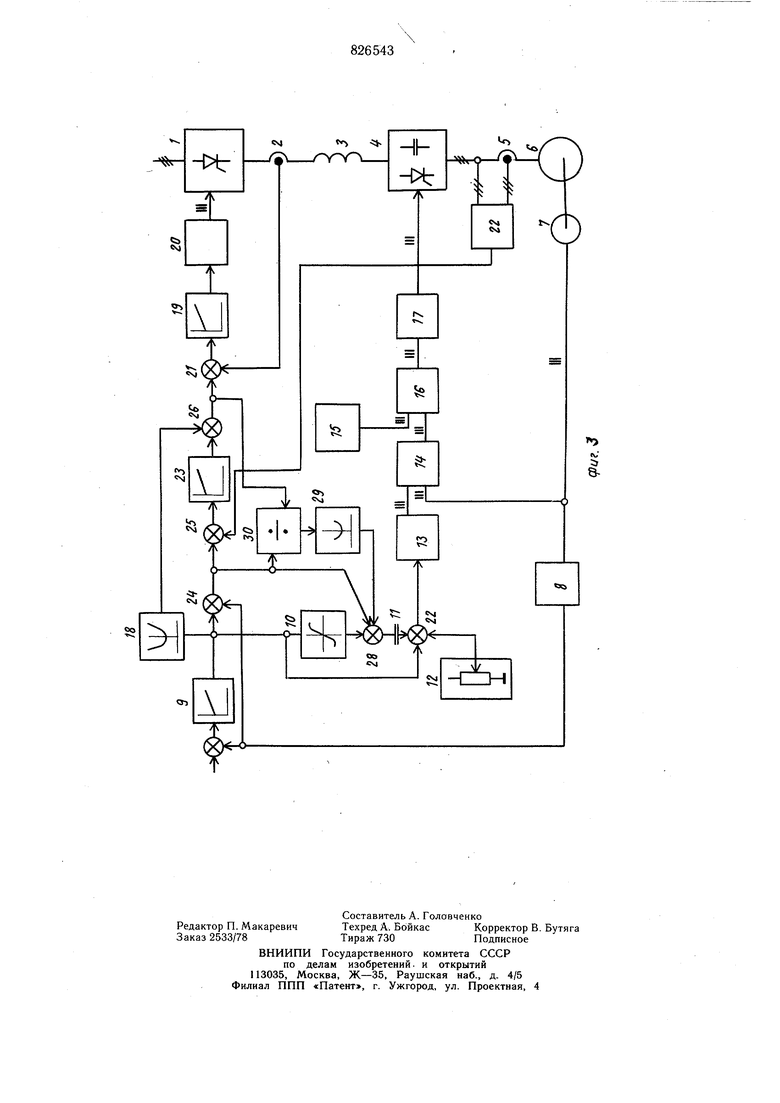
5 функционального преобразователя, выход которого соединен с первым входом седьмого блока суммирования, второй вход которого соединен с выходом четвертого блока сумНИЯ и преобразователь частота-напряжение с импульсным датчиком частоты вращения, а выход регулятора частоты вращения соединен со входом первого функционального преобразователя, выход которого соединен с задающим входом замкнутой системы автоматического регулирования амплитуды тока двигателя, со входом второго функционалдэного преобразователя и с блоком преобразования напряжения в частоту, выход которого соединен с первым входом первого блока суммирования, второй вход которого соединен с выходом импульсного датчика частоты вращения, а выход первого блока суммирования через второй блок суммирования соединен с блоком управления частотой преобразователя, введены блок дифференцирования, блок смещения, генератор стабильной частоты, третий блок суммирования, при этом входы третьего блока суммирования соединены с выходом блока смещения, с выходом регулятора частоты вращения и с выходом блока дифференцимирования, а третий вход соединен с выходом второго функционального преобразователя, а выход седьмого блока суммирования соединен со входом блока дифференцирования. На фиг. 1, 2 и 3 показан частотно-регулируемый электропривод, варианты исполнения. Частотно-регулируемый электропривод содержит управляемый выпрямитель 1 (фиг. 1), датчик 2 тока, сглаживающий дрос сель 3, автономный инвертор 4, датчик 5 тока нагрузки, асинхронный короткозамкнутый двигатель 6, импульсный датчик 7 частоты вращения, преобразователь 8 частота-напряжение, регулятор 9 частоты вращения, второй функциональный преобразователь 10, блок 11 дифференцирования, блок 12 смещения (потенциометр, запитанный от стабилизированного напряжения), преобразователь 13 напряжение-частота, первый блок 14 суммирования, выполняющий операцию суммирования импульсов, генератор 15 стабильной частоты, второй блок 16 суммирования, выполняющий только операцию вычитания импульсов, систему 17 управления инвертором, первый функциональный преобразователь 18, регулятор 19 тока, систему 20 управления выпрямителем, блок 21 сравнения и третий блок 22 суммирования. Замкнутая система автоматического регулирования тока выпрямителя, включающая регулятор 19 тока, систему 20 управления, выпрямитель 1 и датчик 2 тока является автоматической системой регулирования амплитуды тока двигателя. Управляемый выпрямитель 1 через сглаживающий дроссель 3 питает автономный инвертор 4, на выходе которого включен асинхронный короткозамкнутый двигатель 6 с импульсным датчиком 7 частоты вращения (тахогенератором) на валу. Преобразователь частота-напряжение преобразует импульсный сигнал в аналоговый, величина которого пропорциональна частоте импульсов. На входе аналогового регулятора частоты вращения сравниваются сигналы задания и обратной связи по частоте вращения. Выходной сигнал Upc регулятора 9 частоты вращения преобразуется в функциональном преобразователе 10 в функцию arctgK-i X Upc, где Ki - коэффициент. В блоке 22 суммирования суммируются сигналы регулятора 9 частоты вращения, производная выходного сигнала второго функционального преобразователя 10 и некоторый постоянный сигнал, устанавливаемый с помощью блока 12 смещения. Этот постоянный сигнал установлен таким образом, чтобы при отсутствии других сигналов в блоке 22 суммирования,, выходная частота преобразователя 13 напряжение-частота была равна некоторой стабильной частоте. определяемой генератором 15 стабильной частоты. На вход блока 14 суммирования ncv ступают импульсы преобразователя 13 напряжение-частота и импульсы частоты вращения. В блоке 16 суммирования производится вычитание импульсов блока 14 суммирования и импульсов стабильной частоты генератора 15. Таким образом, на выходе блока 16 суммирования получаем импульсы частоты, равной сумме частот вращения и часTOTbij пропорциональной сигналу KzUpc + . + -i arctgKi Upc. Частота, определяемая сигналом + arctgK-iUp,., соответствует в системе координат вектора тока статора частоте скольжения двигателя, при этом момент двигателя оказывается пропорциональным выходному сигналу регулятора частоты вращения. Выходной сигнал блока 16 суммирования, пропорциональный частоте тока статора, преобразуется в системе 17 управления, содержащий делитель частоты, пересчетное кольцо, формирователи управляющих импульсов в-импульсы, подаваемые на тиристоры автономного инвертора 4. Выходной сигнал регулятора 9 частоты вращения преобразуется также с помощью первого функционального преобразователя 18 в сигнал задания амплитуды тока статора, который отрабатывается в замкнутой системе, содержащей регулятор 19 тока, систему 20 управления выпрямителем, управляемый выпрямитель 1, датчик 2 тока. На фиг. 2 приведен модифицированный вариант частотно-регулируемог электропривода, обеспечивающий оптимальное управление приводом при изменении параметров двигателя. Для этого ,в схему электропривода введены дополнительно регулятор 23 ЭДС, четвертый 24, пятый 25 и щестой 26 блоки суммирования и датчик 27 ЭДС электродвигателя. Функциональная зависимость, определяемая функциональным преобразователем 18, должна меняться при изменении параметров ротора электродвигателя, например, вследствие нагрева. Изменение функциональной зависимости осуществляется с помощью регулятора 23 ЭДС, на входе которого через блок 25 суммирования сравниваются сигналы, пропорциональные выходному сигналу блока 24 суммирования, равному сумме частоты враЦ1.ения и частоты скольжения, определяемой выходным сигналом регулятора частоты вращения, и амплитуды ЭДС двигателя. ЭДС двигателя выделяется в датчике 27 ЭДС, на вход которого подаются напряжения и токи фаз двигателя. Поскольку амплитуда ЭДС двигателя пропорциональна частоте статора вне зависимости от араметров ротора, регулятор ЭДС осуществляет необходимую коррекцию тока статора. В некоторых случаях вместо сигнала ДС может использоваться сигнал напряжения. Коррекция тока статора выполняется за счет того, что на вход системы автоматического регулирование амплитуды тока двигателя подается выходной сигнал шестого блока 26 суммирования, на вход которого подаются сигналы с выхода первого функционального преобразователя 18 и регулятора 23 ЭДС. Наиболее распространенным типом автономного инвертора тока, используемым для цепей частотного регулирования, являются автономные инверторы с, двухступенчатой принудительной коммутацией, в частности, с отсекающими диодами (фиг. 3). При управлении частотно-регулируемым электроприводом, выполняемым на основе автономного инвертора тока с двухступенчатой принудительной коммутацией (фиг. 3) фазовый сдвиг между моментом подачи управляющего импульса и началом коммутации тока в фазах двигателя компенсируется суммированием на входе блока 11 диффеpeнциpofeaния с помощью седьмого блока 28 суммирования трех сигналов: выходного сигнала второго функционального преобразователя 10: arctgKiUpc; сигнала частоты статора с выхода блока 24 суммирования, равного сумме аналоговых сигналов частоты вращения и выходного сигнала регулятора частоты вращения; выходного сигнала третьего функциональ ного преобразователя 29, реализующего фун кцию Y на вход которого подается выходной сигнал блока 30 деления, осуществляющего функцию , сигнал U получаем с блока 26 суммирования, а сигнал а - с блока 24 суммирования. Выходной сигнал седьмого блока 28 суммирования через блок 11 дифференцирования, блок 22 суммирования, преобразователь 13 напряжение-частота, блоки 14 и 16 суммирования и систему 17 управления вызывает такое изменение частоты тока статора в функции текущей частоты «о и амплитуды тока 3, что компенсируется запаздывание. Ввод - дополнительных сигналов через блок 22 суммирования на вход преобразователя 13 напряжение-частота и вычитание стабильной частоты в блоке 16 суммирования обеспечивает системе следующие преимущества. Упрощение устройства за счет исключения второго преобразователя напряжениечастота для сигнала, пропорционального про изводного напряжения Upc, упрощение преобразователя 13 напряжение-частота за счет того, что сигнал на его входе всегда одного знака вне зависимости от знака сигнала Up и его производной, упрощение всей системы формирования частоты тока статора за счет того, что в устройстве 14 всегда осуществляется суммирование импульсов, а в устройстве 16 - вычитание, вне зависимости от знака сигнала Upc и его производной. Повыщение быстродействия обработки частоты скольжения за счет того, что изменения выходной частоты преобразователя 13 напряжение-частота в функции выходного сигнала регулятора 9 осуществляется не относительно нулевой частоты, а относительно установленной заранее блоком 12 смещения частоты, определяющей быстродействие отработки входных сигналов преобразователем 13 напряжение-частота. Формула изобретения Г. Частотно-регулируемый электропривод, содержащий асинхронный короткозамкнутый двигатель с импульсным датчиком частоты вращения на валу, подключенный к преобразователю частоты, регулятор частоты вращения, соединенный по входу через блок сравнения и преобразователь частота-напряжение с импульсным датчиком частоты вращения, а выход регулятора частоть,. вращения соединен со входом первого функционального преобразователя, выход которого соединен с задающим входом замкнутой системы автоматического регулирования амплитуды тока двигателя, со входом второго функционального преобразователя, с блоком преобразования напряжения в частоту, выход которого соединен с первым входом первого блока суммирования, второй вход которого соединен с выходом импульсного датчика частоты вращения, а выход первого блока суммирования через второй блок суммирования соединен с блоком управления частотой преобразователя, отличающийся тем, что, с целью упрощения устройства и повыщения его быстродействия, введены блок дифференцирования, блок смещения, генератор стабильной частоты, третий блок суммирования, входы третьего блока суммиро-. вания соединены с выходом блока .смещения, с выходом регулятора частоты вращения и с выходом блока дифференцирования, вход которого соединен с выходом второго функционального преобразователя, а выход третьего блока суммирования подсоединен к входу блока преобразования напряжения в частоту, причем выход генератора стабильной частоты соединен со вторым входом второго блока суммирования. 2. Электропривод по п. 1, отличающийся тем, что, с целью обеспечения стабильности характеристик, введены датчик ЭДС двигателя, четвертый, пятый и щестой блоки сум мирования, регулятор ЭДС, первый, вход четвертого блока суммирования подсоединен к выходу регулятора частоты вращения, второй вход его подсоединен к выходу преобразователя частота-напряжение, выход четвертого блока суммирования подсоединен к первому входу пятого блока суммирования, второй вход которого подсоединен к датчику ЭДС, выход пятого блока суммирования подg82соединен к входу регулятора ЭДС, выход которого соединен с первым входом шестого блока суммирования, второй вход /которого соединен с выходом первого функционального преобразователя, а вьГход шестого блока суммирования соединен с задающим входом системы автоматического регулирования амплитуды тока двигателя. 3. Электропривод по пп. 1 и 2, отличающийся тем, что, с целью улучшения динамических характеристик двигателя за счет стабилизации потока в переходных режимах, введены блок деления, третий функциональный преобразователь и седьмой блок суммирования, при этом вход делимого блока деления соединен с выходом шестого блока суммирования, вход делителя блока
fc 7/
LAgb
1Z
WJ деления соединен с выходом четвертого блока суммирования, выход блока деления соединен со входом третьего функционального преобразователя, выход которого соединен с первым входом седьмого блока суммирования, второй вход которого соединен с выходом четвертого блока суммирования, а третий вход соединен с выходом второго функционального преобразователя, а выход седьмого блока суммирования, соединен со входом блока дифференцирования. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ № 2234681, кл. Н 02 Р 5/36, 1978. 2. Патент ФРГ № 1563228, кл. Н 02 Р 7/42 1973.
