Настоящая заявка испрашивает приоритет предварительной заявки США № 60/761,566, поданной 23 января 2006 года и озаглавленной «Выбор демодулятора MIMO-OFDM в зависимости от формата пакета», которая полностью включена в настоящий документ посредством ссылки.
Область техники
Настоящее описание относится в целом к беспроводной связи и более конкретно к выбору желательной схемы демодуляции в системе приемника.
Предшествующий уровень техники
Системы беспроводной связи широко распространены для предоставления коммуникационного контента различных типов, такого как речь, данные и т.д. Системы могут представлять собой системы множественного доступа, которые могут поддерживать связь с множеством пользователей посредством совместного использования располагаемых ресурсов системы (например, ширины полосы и мощности передачи). Примеры таких систем множественного доступа включают в себя системы множественного доступа с кодовым разделением (CDMA), системы множественного доступа с временным разделением (ТDMA), системы множественного доступа с частотным разделением (FDMA) и системы множественного доступа с ортогональным частотным разделением (OFDMA).
В принципе, системы беспроводной связи множественного доступа могут одновременно поддерживать связь для множества беспроводных терминалов. Соответствующие терминалы осуществляют связь с одной или более базовыми станциями посредством передач по прямой и обратной линиям связи. Прямая (или нисходящая) линия связи относится к линии связи от базовых станций к терминалам, а обратная (или восходящая) линия связи относится к линии связи от терминалов к базовым станциям. Эта линия связи может быть установлена посредством системы с одним входом и одним выходом, с множеством входов и одним выходом и с множеством входов и множеством выходов (MIMO).
Система MIMO использует множество (NT) передающих антенн и множество (NR) приемных антенн для передачи данных. Канал MIMO, образованный NT передающими и NR приемными антеннами, может быть разложен на NS независимых каналов, которые также называются пространственными каналами, где NS≤min {NT, NR}. Каждый из NS независимых каналов соответствует одной размерности. Система MIMO может обеспечивать повышенную эффективность (например, более высокую пропускную способность и/или большую надежность), если используются дополнительные размерности, созданные множеством передающих и приемных антенн.
Система MIMO поддерживает дуплексные системы с временным разделением (TDD) и частотным разделением (FDD). В системе TDD передачи прямой и обратной линий связи находятся в одной и той же частотной области, так что принцип взаимности позволяет оценивать канал прямой линии связи исходя из канала обратной линии связи. Это позволяет пункту доступа извлекать усиление формирования передающей диаграммы направленности по прямой линии связи, когда множество антенн доступны в пункте доступа.
Наиболее популярная архитектура приемника MIMO-OFDM представляет собой линейный пространственный корректор минимальной среднеквадратичной ошибки (MMSE). Однако недавно разработанное сферическое декодирование списка (LSD) существенно снижает вероятность ошибок декодирования MIMO, особенно если канальная кодовая скорость (отношение числа битов, входящих в кодер сигнала, к числу битов, выходящих из кодера сигнала) высока, порядок модуляции (который представляет число (кодированных) битов, передаваемых с использованием символа модуляции) низок и число кандидатов в списке велико ценой повышения сложности приемника. Чтобы снизить сложность, была предложена упрощенная версия LSD, называемая QRM-MLD с квадрантным методом детектирования. Согласно анализу сложности (в терминах количества умножений) QRM-MLD с 20-30 кандидатами имеет сложность, сопоставимую со сложностью пространственного корректора MMSE для 4 передающих и 4 приемных антенн. Более того, сложность QRM-MLD увеличивается пропорционально количеству кандидатов.
LSD может применяться для различных целей. Во-первых, LSD может повысить характеристику пропускной способности приемника MIMO, основанного на одном кодовом слове (SCW) (т.е. высокопроизводительного приложения SCW MIMO). Во-вторых, LSD может минимизировать потерю пропускной способности приемника MIMO, основанного на множестве кодовых слов (МCW), когда приемник не использует последовательную компенсацию помех (SIC) (например, низкоуровневого приложения MIMO-МCW). Действительно, когда требования к памяти и операционная сложность приемника SIC, реализованного с операциями HARQ, являются довольно проблематичными, LSD было бы весьма полезным, если бы оно могло достичь производительности, по пропускной способности сопоставимой с приемником SIC при умеренном количестве кандидатов. В технике существует потребность в оптимальной схеме демодуляции в свете характеристик формата передачи (например, кодовой скорости и порядка модуляции) принимаемых данных.
Сущность изобретения
Ниже представлена упрощенная сущность одного или более аспектов, чтобы обеспечить базовое понимание таких аспектов. Эта сущность изобретения не является всеобъемлющим описанием всех мыслимых аспектов и не призвана идентифицировать ключевые или критические элементы всех аспектов или очерчивать объем каких-либо или всех аспектов. Ее единственной целью является представить некоторые принципы одного или более аспектов в упрощенной форме в качестве вступления к более детальному описанию, приведенному ниже.
В соответствии с одним аспектом способ связи содержит прием формата пакета, который будет использоваться для демодуляции, и выбор либо пространственного корректора минимальной среднеквадратичной ошибки (MMSE), либо сферического декодера списка (LSD), на основе принятого пакетного формата.
В другом аспекте устройство содержит приемный компонент, который принимает формат пакета, который будет использоваться для демодуляции, компонент анализа, который определяет оптимальную одну из множества схем демодуляции, основываясь, по меньшей мере, частично на формате пакета; и компонент демодуляции, который использует оптимальную схему демодуляции.
Согласно другому аспекту машиночитаемый носитель содержит сохраненные на нем исполняемые компьютером инструкции для выполнения следующих действий: прием формата пакета, который будет использоваться для демодуляции, и выбор либо пространственного корректора MMSE, либо сферического декодера списка (LSD), на основе принятого пакетного формата.
Согласно другому аспекту процессор содержит сохраненные на нем исполняемые компьютером инструкции для выполнения следующих действий: прием формата пакета, который будет использоваться для демодуляции, и выбор либо пространственного корректора MMSE, либо сферического декодера списка (LSD), на основе принятого пакетного формата.
Согласно еще одному аспекту устройство содержит средство для приема пакета данных на мобильном устройстве и средство для выбора подходящего демодулятора, основываясь, по меньшей мере, частично на информации формата принятого пакета данных.
Для достижения вышеуказанных и связанных с ними целей один или более аспекты содержат признаки, полностью описанные ниже и, в частности, представленные в формуле изобретения. Последующее описание и приложенные чертежи излагают в деталях некоторые иллюстративные аспекты упомянутых одного или более аспектов. Эти аспекты являются, однако, показательными всего лишь для некоторых возможных путей, которыми могут быть использованы принципы различных аспектов, причем описанные аспекты предназначены для включения в себя всех таких аспектов и их эквивалентов.
Краткое описание чертежей
Фиг.1 - иллюстрация системы беспроводной связи множественного доступа согласно одному варианту осуществления.
Фиг.2 - блок-схема иллюстративной системы связи.
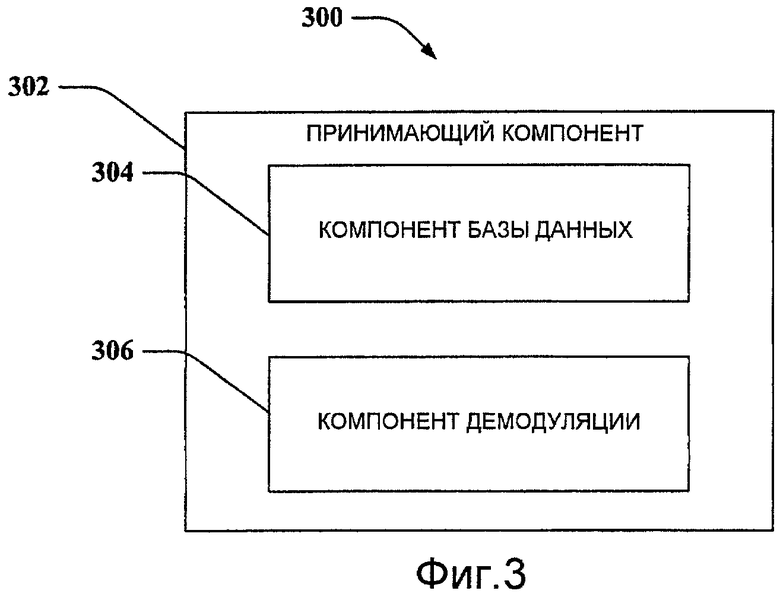
Фиг.3 - иллюстрация приведенной для примера системы, которая осуществляет выбор подходящей схемы демодуляции пакетов в среде беспроводной связи.
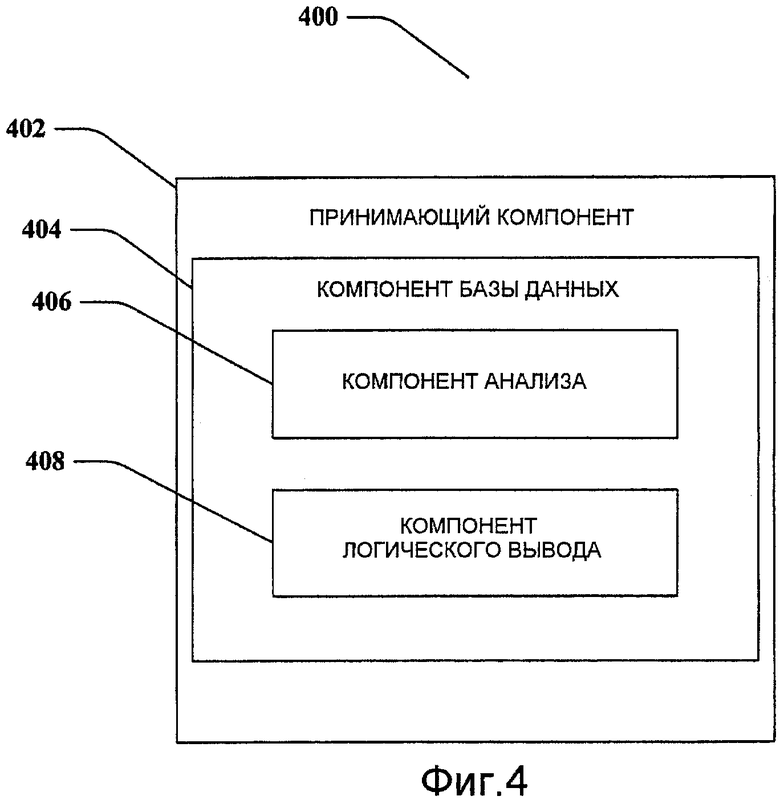
Фиг.4 - другая иллюстрация приведенной для примера системы, которая осуществляет выбор подходящей схемы демодуляции пакетов в среде беспроводной связи.
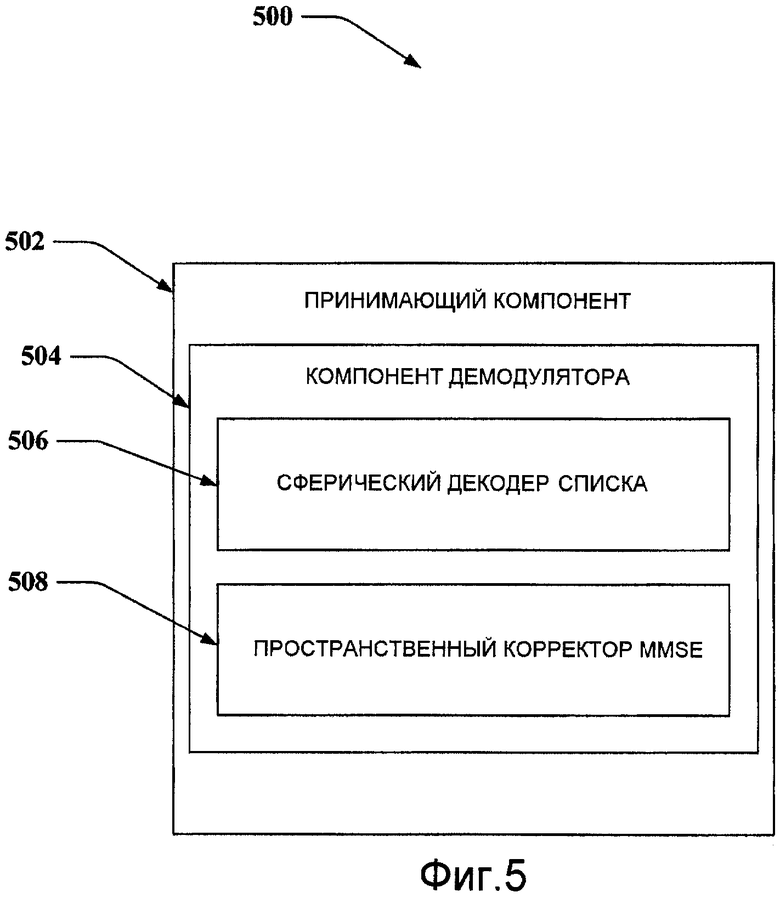
Фиг.5 - другая иллюстрация приведенной для примера системы, которая осуществляет выбор подходящей схемы демодуляции пакетов в среде беспроводной связи.
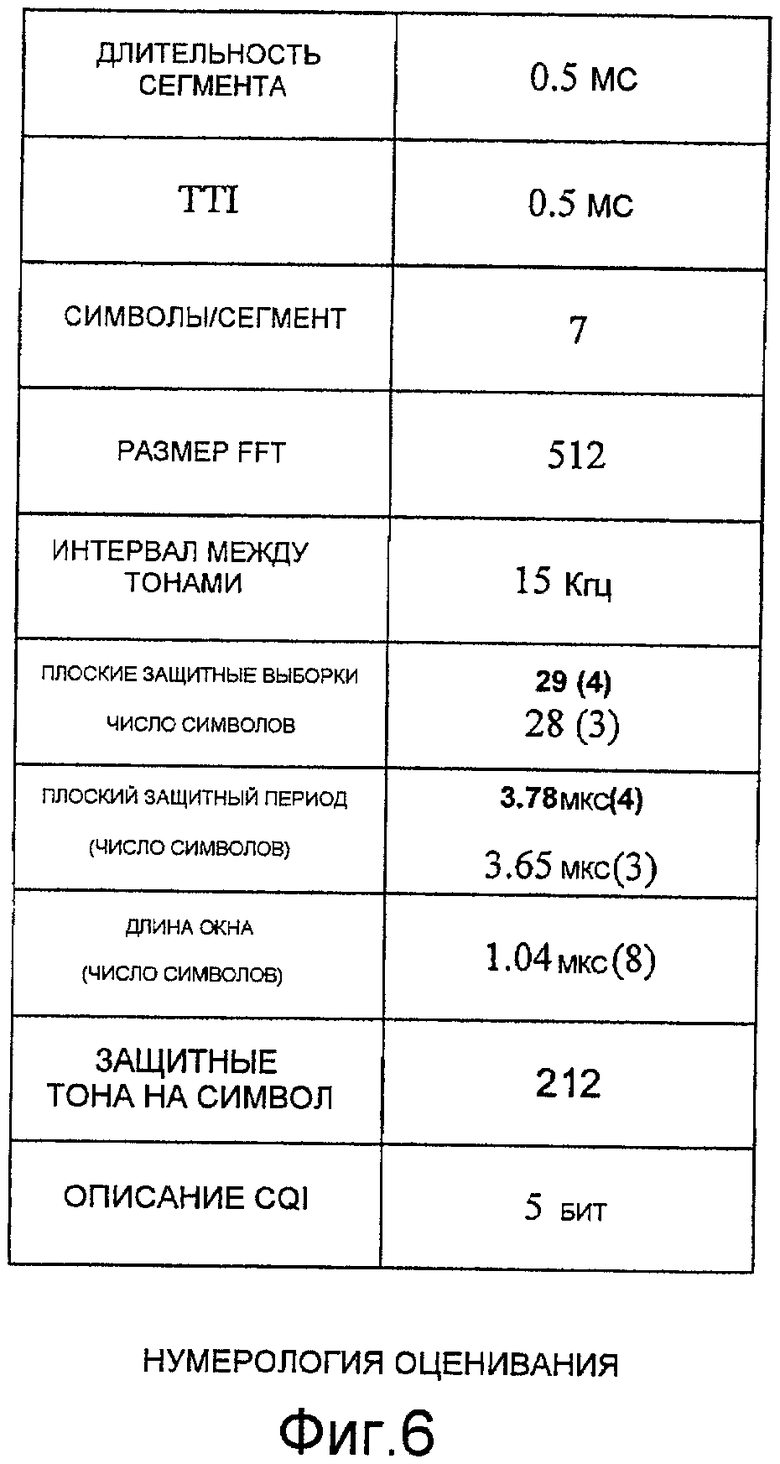
Фиг.6 - таблица, которая описывает нумерологию и распределение ресурсов для моделирования пропускной способности линии связи.
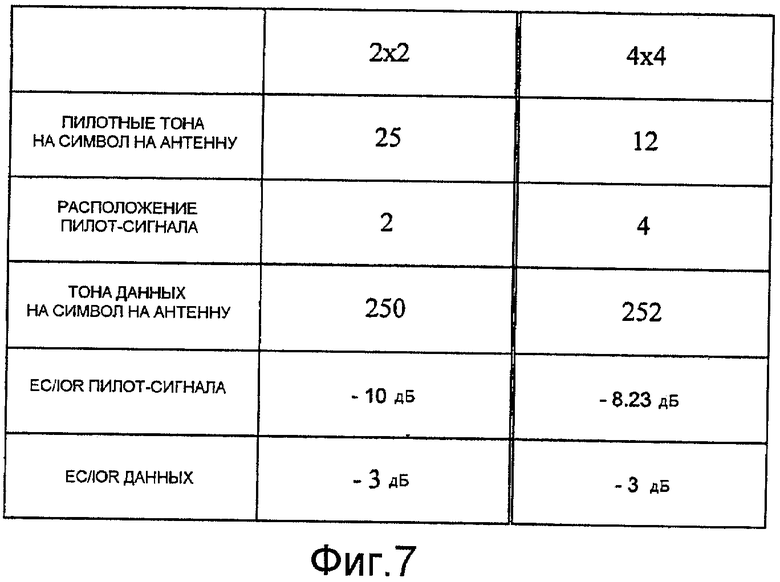
Фиг.7 - другая таблица, которая описывает нумерологию и распределение ресурсов для моделирования пропускной способности линии связи.
Фиг.8 - таблица, которая описывает таблицу форматов схемы модуляции и кодирования (MCS), используемую для адаптивной модуляции и кодирования каждой из множества антенн в системе MIMO.
Фиг.9 - примерный график, который сравнивает характеристики пропускной способности с различными схемами приемника-демодулятора.
Фиг.10 - примерный график, который сравнивает характеристики пропускной способности с различными схемами приемника-демодулятора.
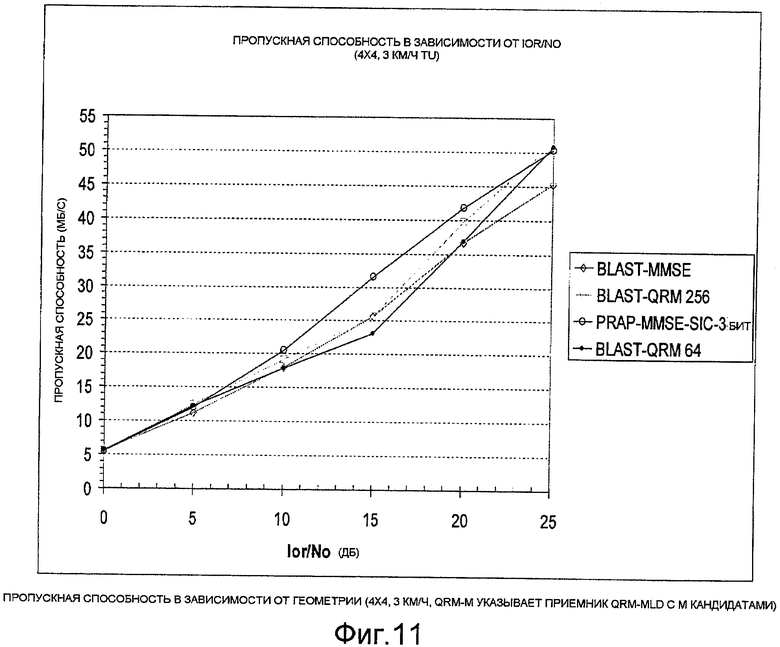
Фиг.11 - примерный график, который сравнивает характеристики пропускной способности с различными схемами приемника-демодулятора.
Фиг.12 - примерный график, который сравнивает характеристики пропускной способности с различными схемами приемника-демодулятора.
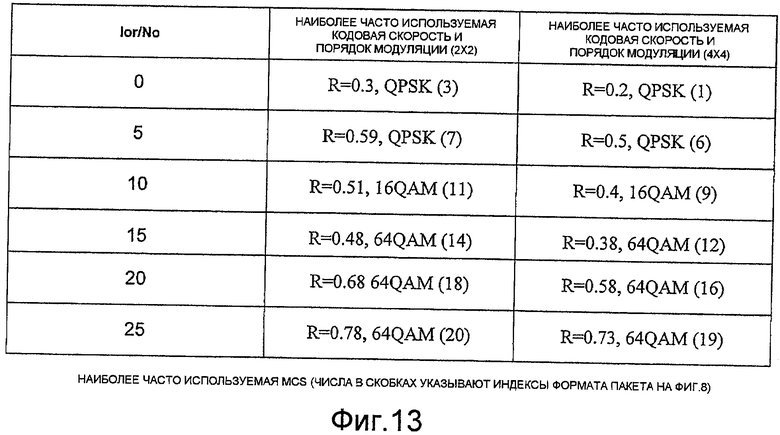
Фиг.13 - таблица, которая описывает наиболее часто используемые схемы модуляции и кодирования для передачи данных.
Фиг.14 - иллюстрация приведенного для примера способа, который облегчает демодуляцию принятого пакета данных в соответствии с форматом передачи пакета данных.
Фиг.15 - другая иллюстрация приведенного для примера метода, который облегчает демодуляцию принятого пакета данных в соответствии с форматом передачи пакета данных.
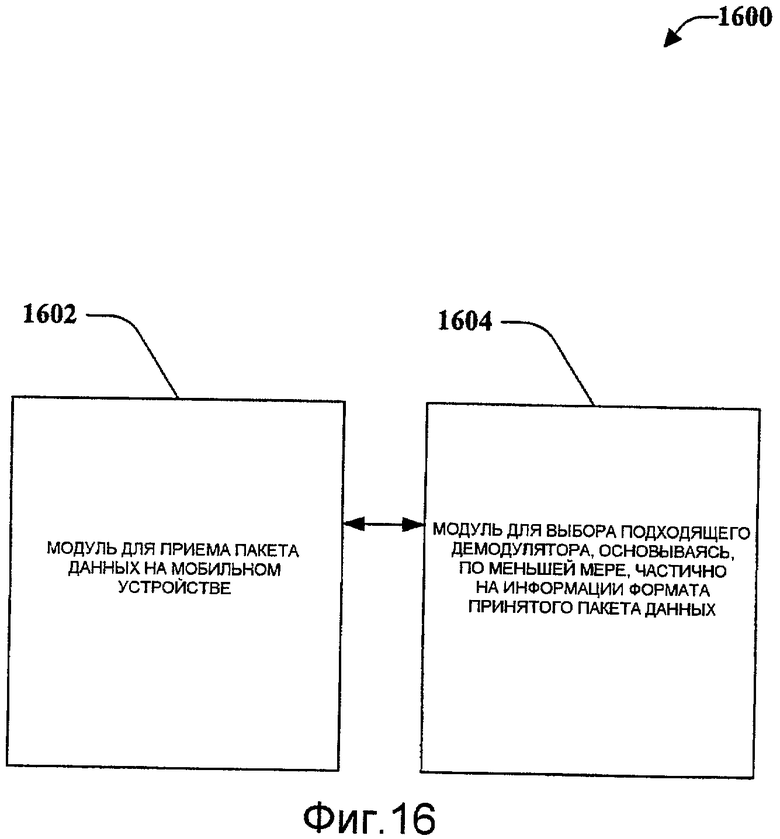
Фиг.16 - блок-схема системы, которая облегчает демодуляцию принятого пакета данных в соответствии с форматом передачи пакета данных.
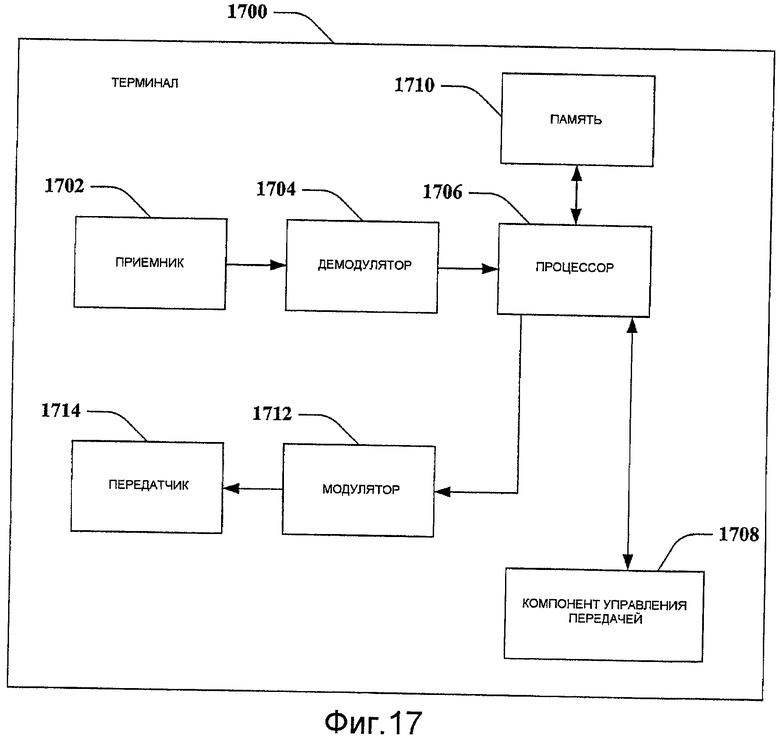
Фиг.17 - иллюстрация системы, которая обеспечивает связь в других секторах в соответствии с одним или более аспектами, представленными здесь.
Фиг.18 - иллюстрация системы, которая обеспечивает обработку передач обратной линии связи в необслуживающем секторе терминала в соответствии с одним или более аспектами, представленными здесь.
Фиг.19 - иллюстрация среды беспроводной связи, которая может быть использована с различными системами и способами, описанными здесь.
Ссылка А является презентацией, относящейся к аспектам, описанным здесь, и данная ссылка образует часть настоящей спецификации.
Детальное описание
Различные варианты описаны далее со ссылкой на чертежи, где одинаковые ссылочные позиции использованы для обозначения подобных элементов на всех чертежах. В последующем описании, в целях пояснения, изложены различные конкретные детали, чтобы обеспечить глубокое понимание одного или более вариантов осуществления. Однако может быть очевидным, что такие варианты осуществления могут быть реализованы без этих специфических деталей. В других случаях хорошо известные структуры и устройства показаны в форме блок-схемы, чтобы облегчить описание одного или более вариантов осуществления.
Как использовано в этой заявке, термины «компонент», «модуль», «система» и т.п. предназначены для ссылок на относящийся к компьютеру объект, как аппаратные средства, программно-аппаратные средства, комбинация аппаратных средств и программного обеспечения, программное обеспечение, так и исполняемое программное обеспечение. Например, компонент может быть, без ограничения указанным, процессом, исполняемым на процессоре, процессором, объектом, исполнимым файлом, потоком управления, программой и/или компьютером. В качестве иллюстрации, как приложение, исполняющееся на вычислительном устройстве, так и вычислительное устройство могут быть компонентом. Один или более компоненты могут находиться в процессе и/или потоке управления, и компонент может быть локализован на одном компьютере и/или распределен между двумя или более компьютерами. В дополнение, эти компоненты могут исполняться с различных машиночитаемых носителей, имеющих различные структуры данных, сохраненных на них. Компоненты могут осуществлять связь посредством локальных и/или удаленных процессов, например, в соответствии с сигналом, имеющим один или более пакеты данных (например, данные из одного компонента взаимодействуют с другим компонентом в локальной системе, распределенной системе и/или по сети, такой как Интернет, с другими системами с помощью сигнала).
Кроме того, различные варианты осуществления описаны здесь в связи с мобильным устройством. Мобильное устройство может также называться системой, абонентским блоком, абонентской станцией, мобильной станцией, мобильным модулем, удаленной станцией, удаленным терминалом, терминалом доступа, пользовательским терминалом, терминалом, устройством беспроводной связи, пользовательским агентом, пользовательским устройством или пользовательским оборудованием (UE). Мобильное устройство может быть сотовым телефоном, бесшнуровым телефоном, телефоном протокола инициации сессии (SIP), станцией беспроводного локального шлейфа (WLL), персональным цифровым помощником (PDA), портативным устройством с возможностью беспроводного соединения, вычислительным устройством или иным устройством обработки, соединенным с беспроводным модемом. Кроме того, различные варианты осуществления описаны здесь в связи с базовой станцией. Базовая станция может использоваться для осуществления связи с мобильным(и) устройством(ами) и может также упоминаться как пункт доступа, узел В (Node B) или определяться с использованием некоторой другой терминологии.
Более того, различные аспекты или признаки, описанные здесь, могут быть реализованы как способ, устройство или изделие (продукт производства) с использованием стандартных методов программирования и/или проектирования. Термин «продукт производства», как он использован здесь, предназначен для включения в себя компьютерной программы, к которой может осуществляться доступ с любого машиночитаемого устройства, носителя или среды. Машиночитаемые среды могут включать в себя, без ограничения указанным, магнитные запоминающие устройства (например, жесткий диск, дискета, магнитные полоски и т.д.), оптические диски (например, компакт-диск (CD), цифровой многофункциональный диск (DVD) и т.д.), смарт-карты, устройства флеш-памяти (стираемое программируемое постоянное запоминающее устройство (EPROM), плата, stick (карта памяти), key drive (миниатюрное ЗУ, вставляемое в компьютер, для переноса данных между машинами) и т.д.). Дополнительно, различные среды для хранения, описанные здесь, могут представлять одно или более устройства и/или другие машиночитаемые среды для хранения информации. Термин «машиночитаемая среда (носитель)» может включать в себя, без ограничения указанным, беспроводные каналы и различные другие среды, способные хранить, содержать и/или переносить инструкции и/или данные.
На фиг.1 представлена система беспроводной связи множественного доступа в соответствии с одним вариантом осуществления. Пункт доступа (АР) 100 включает в себя группы из множества антенн, одну, включающую 104 и 106, другую, включающую 108 и 110, и еще одну, включающую 112 и 114. Согласно фиг.1 только две антенны показаны для каждой группы антенн, однако для каждой группы антенн может использоваться больше или меньше антенн. Терминал доступа (АТ) 116 осуществляет связь с антеннами 112 и 114, где антенны 112 и 114 передают информацию к терминалу 116 доступа по прямой линии 120 и принимают информацию от терминала 116 доступа по обратной линии 118. Терминал 122 доступа осуществляет связь с антеннами 106 и 108, где антенны 106 и 108 передают информацию к терминалу 122 доступа по прямой линии 126 и принимают информацию от терминала 122 доступа по обратной линии 124. В системе FDD линии 118, 120, 124 и 126 связи могут использовать различную частоту для связи. Например, прямая линия 120 может использовать частоту, отличающуюся от той, которая используется обратной линией 118.
Каждая группа антенн и/или область, в которой они предназначены для осуществления связи, часто упоминается как сектор пункта доступа. В одном варианте осуществления каждая из групп антенн предназначена для осуществления связи с терминалами доступа в секторе области, покрываемой пунктом 100 доступа.
При осуществлении связи по прямым линиям 120 и 126 передающие антенны пункта 100 доступа используют формирование диаграммы направленности для улучшения отношения сигнал/шум прямых линий для различных терминалов 116 и 124 доступа. Также пункт доступа, использующий формирование диаграммы направленности антенн для передачи к терминалам доступа, рассредоточенным случайным образом в его области покрытия, вызывает меньше помех терминалам доступа в смежных ячейках, чем пункт доступа, передающий через одну антенну ко всем своим терминалам доступа. Пункт доступа может быть стационарной станцией, используемой для связи с терминалами, и может также определяться как узел доступа, узел В (Node B) или с использованием некоторой другой терминологии. Терминал доступа может определяться как терминал доступа, пользовательское оборудование (UE), устройство беспроводной связи, терминал или с использованием некоторой другой терминологии.
На фиг.2 показана блок-схема системы 210 передатчика (также известной как пункт доступа) и системы 250 приемника (также известной как терминал доступа) в системе 200 MIMO. В системе 210 передатчика данные трафика для ряда потоков данных предоставляются от источника 212 данных на процессор 214 данных передачи (ТХ). В одном варианте осуществления каждый поток данных передается через соответствующую передающую антенну. Процессор 214 ТХ-данных форматирует, кодирует и перемежает данные трафика для каждого потока данных на основе конкретной схемы кодирования, выбранной для этого потока данных, чтобы предоставить кодированные данные. Кодированные данные для каждого потока данных могут быть мультиплексированы с пилотными данными с использованием методов OFDM. Пилотные данные в типовом случае являются известным шаблоном данных, который обрабатывается известным способом и может использоваться в системе приемника для оценивания отклика канала. Мультиплексированные пилотные и кодированные данные для каждого потока данных затем модулируются (например, отображаются на символы) на основе конкретной схемы модуляции (например, BPSK (двоичная фазовая манипуляция), QSPK (квадратурная фазовая манипуляция), M-PSK (М-ичная фазовая манипуляция) или M-QAM (М-ичная квадратурная амплитудная модуляция)), выбранной для этого потока данных, для предоставления символов модуляции. Скорость данных, кодирование и модуляция для каждого потока данных могут быть определены инструкциями, выполняемыми процессором 230.
Символы модуляции для всех потоков данных затем предоставляются процессору 220 TX MIMO, который может дополнительно обрабатывать символы модуляции (например, для OFDM). Процессор 220 TX MIMO затем подает NT потоков символов модуляции на NT передатчиков 222а - 222t. В некоторых вариантах осуществления процессор 220 TX MIMO применяет веса формирования диаграммы направленности к символам потоков данных и к антенне, из которой символ передается.
Передатчик 222 принимает и обрабатывает соответствующий поток символов для обеспечения одного или более аналоговых сигналов и дополнительно преобразует (например, усиливает, фильтрует и преобразует с повышением частоты) аналоговые сигналы для предоставления модулированного сигнала, пригодного для передачи по каналу MIMO. NT модулированных сигналов с передатчиков 222а-222t передаются от NT передающих антенн 224а-224t соответственно. В системе 250 приемника переданные модулированные сигналы принимаются NR антеннами 252а-252r, и принятый сигнал от каждой антенны 252 подается на соответствующий приемник (RCVR) 254f-254r. Каждый приемник 254 преобразует (например, фильтрует, усиливает и преобразует с понижением частоты) соответствующий принятый сигнал, оцифровывает преобразованный сигнал для получения выборок и дополнительно обрабатывает выборки для обеспечения соответствующего «принятого» потока символов.
Процессор 260 данных приема (RX) затем принимает и обрабатывает NR принятых потоков символов от NR приемников 254, основываясь на конкретном методе обработки приемника, чтобы получить NT «продетектированных» потоков символов. Процессор 260 RX-данных затем демодулирует, обращенно перемежает и декодирует каждый продетектированный поток символов для восстановления данных трафика для потока данных. Обработка процессором 260 RX-данных является комплементарной обработке, выполняемой процессором 220 TX MIMO и процессором 214 ТХ-данных в системе 210 передатчика. Процессор 270 периодически определяет, какую матрицу предварительного кодирования использовать (описано ниже). Процессор формулирует сообщение обратной линии, содержащее часть индекса матрицы и часть значения ранга.
Сообщение обратной линии может содержать различные типы информации относительно линии связи и/или принятого потока данных. Сообщение обратной линии затем обрабатывается процессором 238 ТХ-данных, который также принимает данные трафика для ряда потоков данных от источника 236 данных, модулированных модулятором 280, преобразованных передатчиками 254а - 256r и переданных назад к системе 210 передатчика.
В системе 210 передатчика модулированные сигналы от системы 250 приемника принимаются антеннами 224, преобразуются приемниками 222, демодулируются демодулятором 240 и обрабатываются процессором 242 RX-данных для извлечения сообщения обратной линии, переданного системой 250 приемника. Процессор 230 затем определяет, какую матрицу предварительного кодирования использовать для определения весов формирования диаграммы направленности, и затем обрабатывает извлеченное сообщение.
Рассмотрим фиг.3, где иллюстрируется система 300, которая осуществляет выбор оптимального демодулятора, в зависимости от формата передачи, в соответствии с различными вариантами осуществления, описанными здесь. Принимающий компонент 302, ассоциированный с мобильным терминалом (не показан) состоит из компонента 304 базы данных и компонента 306 демодуляции. Компонент 304 базы данных может определять оптимальную схему демодуляции для последующего использования компонентом 306 демодуляции. Более конкретно, компонент 304 базы данных может определить желательную схему демодуляции, основываясь, по меньшей мере, частично на характеристиках принятых данных. Компонент 306 демодуляции может использовать подходящую схему демодуляции в соответствии с определением в компоненте 304 базы данных. В одном варианте осуществления компонент 306 демодуляции осуществляет выбор между сферическим декодером списка (LSD) и пространственным корректором MMSE. Однако следует иметь в виду, что в системе 300 может быть применена любая схема демодуляции.
Согласно фиг.4 система 400 содержит принимающий компонент 402. В примерном варианте осуществления принимающий компонент 402 может быть системой MIMO-OFDM, однако следует иметь в виду, что любая архитектура приемника может использоваться в системе 400. Принимающий компонент 402 содержит компонент 404 базы данных. Компонент 404 базы данных может дополнительно содержать компонент 406 анализа и компонент 408 логического вывода. В одном варианте осуществления компонент 406 анализа может использовать таблицы преобразования для определения соответствующего демодулятора, который должен быть применен, основываясь на характеристиках принятого сигнала. Более конкретно, например, таблицы преобразования, которые хранят данные, относящиеся к формату передачи (например, кодовую скорость и порядок модуляции), сопоставляются с характеристиками формата передачи принятых данных, чтобы определить, следует ли использовать демодулятор MMSE или LSD. Альтернативно, например, компонент 408 логического вывода может быть использован для того, чтобы определить подходящий демодулятор, который должен быть использован, если компонент 406 анализа не может выполнить такое определение. В одном варианте осуществления компонент 408 логического вывода может использовать классификатор(ы) любого подходящего типа, включая, например, априорные, основанные на правилах, классификаторы и классификаторы, основанные на модели вероятностной зависимости, для определения подходящей схемы демодуляции. Дальнейшие примеры систем классификаторов включают в себя классификаторы экспертных систем, примитивные байесовские классификаторы, классификаторы максимума правдоподобия, классификаторы нейронных сетей, классификаторы вспомогательной векторной машины (SVM), классификаторы статистической модели языка и классификаторы дерева решений.
Согласно фиг.5 система 500 содержит компонент 502 приемника. В соответствии с примерным вариантом осуществления компонент 502 приемника может быть системой приемника MIMO-OFDM. Однако должно быть понятно, что в системе 500 может быть использована любая система приемника. Компонент 502 приемника содержит компонент 504 демодулятора. Понятно, что компонент 504 демодулятора может использовать любую схему демодуляции. В примерном варианте осуществления компонент 504 демодулятора использует один из LSD 506 и пространственного корректора 508 MMSE, основываясь, по меньшей мере, частично на характеристиках формата передачи принятых данных. Далее описана приведенная для примера стратегия выбора демодулятора в приемнике MIMO-OFDM, когда имеется четыре передающих и четыре приемных антенны, что предполагает, что максимально допустимое число кандидатов (то есть сложность) для LSD равно 64.
Если кодовая скорость равна или больше чем 2/3, то LSD значительно превосходит пространственный корректор MMSE. Использовать LSD с 64 кандидатами для всех порядков модуляции. Иначе, если кодовая скорость между 1\2 и 2/3, то использовать LSD с 64 кандидатами для 16QAM и более низких порядков модуляции и использовать пространственный корректор MMSE для 64QAM. Иначе (т.е. кодовая скорость <1/2), если используется модуляция QPSK, использовать LSD с 64 кандидатами. Иначе, если эффективность MMSE сопоставима или лучше, чем у LSD, то использовать пространственный корректор MMSE.
После 2-й передачи (например, повторной передачи) кодовая скорость, вероятно, достаточно низка для использования только пространственного корректора MMSE. Как отмечено выше, число кандидатов может настраиваться в операции LSD, если необходимо. Кроме того, в системе MIMO-OFDM с 2 передающими и 2 приемными антеннами число кандидатов может быть сокращено более агрессивно (например, 32). Ниже приведено обсуждение относительно избирательного проектирования демодулятора с оптимизацией посредством моделирования.
Далее со ссылкой на фиг.5, если определяется, что желательно использование схемы модуляции LSD, то компонент 502 приемника может дополнительно избирательным образом определить число кандидатов (например, сложность) в зависимости от кодовой скорости и порядка модуляции и числа уровней или передающих антенн.
Таблицы настроек моделирования на фиг.6 и 7 описывают нумерологию и распределение ресурсов для моделирования пропускной способности линии связи. Конфигурации передатчика, канала и приемника следующие:
- 2×2 (2 уровня) и 4×4 (4 уровня) антенная конфигурация для MIMO;
- MCW-MIMO (PRAP w/полный CQI, инкрементный CQI и множественное ACK) и SCW-MIMO (BLAST);
- архитектура приемника - линейный MMSE и QRM-MLD для SCW-MIMO (BLAST), MMSE-SIC для WCW-MIMO (PRAP);
- структура FDM пилот-сигнала N-кратным частотно-временным распределением, где N - число передающих антенн (N=1, 2, 4);
- тона пилот-сигнала и данных равномерно распределены по всему диапазону;
- ограниченные по полосе белые помехи и шум;
- GSM TU канал - 3 км/ч, 30 км/ч;
- оценивание канала - оценивание MMSE;
- длина функции оценки канала - 15 символов OFDM;
- задержка обратной связи CQI - 2 TTI;
- частота обратной связи CQI - однократно на TTI;
- число параллельных процессов H-ARQ - 6;
- максимальное число повторных передач - 4 (включая первую передачу);
- адаптивное управление H-ARQ BLER - 20% целевого BLER после первой передачи.
На фиг.8 показана таблица, которая описывает таблицу форматов схемы модуляции и кодирования (MCS), используемую для адаптивной модуляции и кодирования каждой передающей антенны, которая состоит из 32 элементов записи. Таким образом, 5 битов выделены для описания полного индикатора качества канала (CQI) как для передач множества кодовых слов с множеством входов и множеством выходов (MCW-MIMO), так и для передач одиночного кодового слова с множеством входов и множеством выходов (SCW-MIMO), причем MCW-MIMO управляет форматом передачи каждого уровня индивидуально, в то время как SCW-MIMO управляет общим форматом передачи, который применяется ко всем уровням. Для инкрементного описания CQI для MCW-MIMO было выделено 3 бита (для перекрытия от 0 дБ до 7 дБ). Отметим, что пакеты, которые используют затененные форматы MCS, являются недекодируемыми, ввиду ограниченного порядка модуляции (максимум равен 6 соответственно 64QAM) по первой передаче, но обеспечивают точную гранулярность скорости данных во взаимосвязи с операцией гибридного автоматического запроса (H-ARQ), поэтому максимальная спектральная эффективность ограничена до 21 Мб/с на передающую антенну при моделировании.
На фиг.9-12 приведены соответствующие графики сравнения характеристик пропускной способности MCW-MIMO с приемником с последовательной компенсацией помех методом минимальной среднеквадратичной ошибки (MMSE-SIC) (MIMO высокого уровня), SCW-MIMO с линейным приемником MMSE (MIMO низкого уровня) и SCW-MIMO с приемником LSD. Количество кандидатов LSD установлено на 64. Как можно видеть на всех графиках, характеристика пропускной способности приемника LSD сопоставима с соответствующей характеристикой приемника MMSE-SIC в низкой и высокой геометрии, но хуже в средней геометрии (в окрестности 15 дБ). В частности, в 4×4 MIMO приемник LSD с 64 кандидатами имеет даже худшую характеристику, чем линейный приемник MMSE, и сопоставимая пропускная способность была достигнута только с использованием 256 кандидатов, что требует в 10 раз более высокой сложности, чем у приемника MMSE.
Со ссылкой на фиг.13 становится ясно, что низкая характеристика приемника LSD проявляется, когда кодовая скорость ниже чем 1/2 и модуляция соответствует 64 QAM, что также было показано при оценивании эффективности BLER с фиксированной скоростью данных (см. кодовую скорость и порядок модуляции, соответствующие геометрии 15 дБ.) С другой стороны, LSD становится очень эффективным, когда кодовая скорость высока или порядок модуляции низок.
Различные методологии в соответствии с настоящим изобретением будут описаны далее с помощью последовательности действий. Должно быть понятно, что настоящее изобретение не ограничено порядком действий, так как некоторые действия могут в соответствии с настоящим изобретением осуществляться в отличающихся порядках и/или одновременно с другими действиями по сравнению с тем, что показано и описано здесь. Например, специалистам в данной области техники должно быть понятно, что способ может быть представлен, альтернативным образом, как последовательность взаимосвязанных состояний, например, как на диаграмме состояний. Кроме того, не все проиллюстрированные действия могут потребоваться для реализации способа в соответствии с настоящим изобретением.
Со ссылкой на фиг.14 иллюстрируется способ 1400, который облегчает демодуляцию модулированного сигнала в системе беспроводной связи. Способ 1400 начинается на этапе 1402 и 1404, модулированный сигнал принимается в одной или более мобильных системах. На этапе 1406 модулированный сигнал обрабатывается посредством процедур преобразования, таких как фильтрация, усиление и понижающее преобразование принятого сигнала. Преобразованный сигнал затем оцифровывается для получения выборок и обрабатывается для получения соответствующего потока символов. На этапе 1408, в одной или более мобильных системах, характеристики модулированного сигнала анализируются на этапе 1410, подходящая схема демодуляции (например, LSD или пространственный корректор MMSE) выбирается, основываясь, по меньшей мере, частично на характеристиках формата передачи (например, кодовой скорости и/или порядке модуляции). Это определение может включать в себя анализ затрат и выгод. Затраты могут измеряться посредством таких факторов, как потребление мощности, вероятность ошибок декодирования, затраты, ассоциированные со сложностью приемника, и потери в характеристике пропускной способности, основываясь на том, используется ли одиночное кодовое слово или множество кодовых слов. Выгода может измеряться посредством таких факторов, как снижение вероятности ошибок декодирования, оптимизация характеристики пропускной способности и предотвращение увеличения сложности приемника. Может приниматься решение на основе вероятностного анализа относительно того, где переход инициируется, если уровень достоверности высокий, и не инициируется, если уровень достоверности низкий. Как обсуждено выше, основанные на AI методы (включая системы машинного обучения) могут быть использованы в связи с таким определением или логическим выводом. Альтернативно, может использоваться более простой, основанный на правилах, процесс, где если определенные условия удовлетворены, то происходит переход между схемами демодуляции, а если нет, то переход не инициируется.
Со ссылкой на фиг.15 описывается способ 1500, который облегчает демодуляцию модулированного сигнала в системе беспроводной связи. Способ 1500 начинается на этапе 1502, и модулированный сигнал принимается в одной или более мобильных системах на этапе 1504. На этапе 1506 модулированный сигнал обрабатывается посредством процедур преобразования, таких как фильтрация, усиление и понижающее преобразование принятого сигнала. Преобразованный сигнал затем оцифровывается для получения выборок и обрабатывается для получения соответствующего потока символов. На этапе 1508 анализируются характеристики формата передачи принятого модулированного сигнала. В частности, если определяется, что кодовая скорость сигнала превышает первое пороговое значение (например, две трети), способ 1500 переходит к этапу 1510. На этапе 1510 способ 1500 использует LSD для демодуляции принятого модулированного сигнала. Однако если кодовая скорость не превышает первое пороговое значение на этапе 1508, то способ 1500 переходит к этапу 1512. На этапе 1512, если определено, что кодовая скорость модулированного сигнала находится в пределах второго порога (например, больше чем одна вторая и меньше чем две трети), что находится ниже, чем первое пороговое значение (например, две трети), то способ 1500 переходит к этапу 1514. На этапе 1514, если определено, что порядок модуляции низкий (например, 16QAM), то используется LSD для демодуляции принятого модулированного сигнала на этапе 1510. С другой стороны, для сигнала с высоким порядком модуляции (например, 64QAM) используется пространственный корректор MMSE для демодуляции сигнала, принятого на этапе 1516. Если результат определения на этапе 1512 соответствует «НЕТ», то способ 1500 переходит к этапу 1518. На этапе 1518 выполняется определение относительно того, использована ли квадратурная фазовая манипуляция (QPSK). Если определение на этапе 1518 соответствует «ДА», то способ 1500 переходит к этапу 1510, где используется LSD для демодуляции принятого модулированного сигнала на этапе 1510. Противоположно этому, если определение на этапе 1518 соответствует «НЕТ», то способ 1500 переходит к этапу 1516, где используется пространственный корректор MMSE для демодуляции модулированного сигнала.
На фиг.16 иллюстрируется система 1600, которая облегчает выбор оптимального демодулятора. Система 1600 может включать в себя модуль 1602 для приема пакета данных в мобильном устройстве. Понятно, что мобильное устройство может быть сотовым телефоном, бесшнуровым телефоном, телефоном протокола инициации сессии (SIP), станцией беспроводного локального шлейфа (WLL), персональным цифровым помощником (PDA), портативным устройством с возможностью беспроводного соединения, вычислительным устройством или иным устройством обработки, соединенным с беспроводным модемом. Система 1600 также может содержать модуль 1604 для выбора подходящего демодулятора (например, пространственного корректора MMSE, LSD), основываясь, по меньшей мере, частично на информации формата принятого пакета данных.
Фиг.17 иллюстрирует терминал или пользовательское устройство 1700, которое обеспечивает связь в других секторах в среде беспроводной связи в соответствии с одним или более аспектами, изложенными здесь. Терминал 1700 содержит приемник 1702, который принимает сигнал, например одну или более приемные антенны, и выполняет типовые действия (например, фильтрует, усиливает, преобразует с понижением частоты и т.д.) над принятым сигналом и оцифровывает преобразованный сигнал для получения выборок. Демодулятор 1704 может демодулировать выборки и выдавать принятые пилотные символы на процессор 1706.
Процессор 1706 может быть процессором, предназначенным для анализа информации, принятой приемным компонентом 1702, и/или генерирования информации для передачи передатчиком 1714. Процессор 1706 может быть процессором, который управляет одним или более компонентами терминала 1700, и/или процессором, который анализирует информацию, принятую приемником 1702, генерирует информацию для передачи передатчиком 1714 и управляет одним из компонентов терминала 1700. Процессор 1706 может использовать любой из способов, описанных выше, включая те, которые описаны со ссылкой на фиг.14 и 15.
Кроме того, терминал 1700 может включать в себя компонент 1708 управления передачей, который анализирует принятый ввод, включая квитирования успешных передач. Квитирования (АСК) могут приниматься из обслуживающего сектора и/или соседнего сектора. Квитирования могут указывать, что предыдущая передача была успешно принята и декодирована одним из пунктов доступа. Если квитирование не принято или если принято негативное квитирование (NAK), то передача должна быть передана повторно. Компонент 1708 управления передачей может быть включен в процессор 1706. Понятно, что компонент 1708 управления передачей может включать в себя код управления передачей, который выполняет анализ в связи с определением приема квитирования.
Терминал 1700 может дополнительно содержать память 1710, которая оперативно связана с процессором 1706 и которая может хранить информацию, относящуюся к передачам, активный набор секторов, способы управления передачами, таблицы преобразования, содержащие информацию, относящуюся к ним, и любую другую соответствующую информацию, относящуюся к передачам и активному набору секторов, как описано здесь. Понятно, что компоненты запоминающего устройства (ЗУ) данных (например, блоки памяти), описанные здесь, могут представлять собой либо энергозависимую память, либо энергонезависимую память либо могут включать в себя как энергозависимую, так и энергонезависимую память. В качестве иллюстрации, но не ограничения, независимая память может включать в себя ПЗУ (ROM), программируемое ROM (PROM), электрически программируемое ROM (EPROM), электрически стираемое ROM (EEPROM) или флеш-память. Энергозависимая память может включать в себя ОЗУ (RAM), которое действует как внешняя кэш-память. В качестве иллюстрации, но не ограничения, RAM доступно во многих формах, таких как синхронное RAM (SRAM), динамическое RAM (DRAM), синхронное DRAM (SDRAM), SDRAM с двойной скоростью данных (DDR SDRAM), усовершенствованное SDRAM (ESDRAM), Synchlink DRAM (SLDRAM), прямое Rambus RAM (DRRAM). Память 1710 рассматриваемых систем и способов предназначена для того, чтобы содержать, без ограничения указанным, эти и другие подходящие типы памяти. Процессор 1006 соединен с модулятором 1712 символов и передатчиком 1714, который передает модулированный сигнал.
На фиг.18 показана иллюстрация системы 1800, которая облегчает связь в других секторах в среде связи в соответствии с различными аспектами. Система 1800 содержит пункт 1802 доступа с приемником 1810, который принимает сигнал(ы) от одного или более терминалов 1804 через одну или более приемные антенны 1806 и передает к одному или более терминалам 1804 через множество передающих антенн 1808. Терминалы 1804 могут включать в себя те терминалы, которые поддерживаются пунктом 1802 доступа, а также терминалы 1804, поддерживаемые соседними секторами. В одном или более аспектах приемные антенны 1806 и передающие антенны 1808 могут быть реализованы использованием одного набора антенн. Приемник 1810 может принимать информацию с приемных антенн 1806 и оперативно связан с демодулятором 1812, который демодулирует принятую информацию. Приемник 1810 может быть, например, приемником на основе MMSE или некоторым другим подходящим приемником для разделения терминалов, ассоциированных с ним, как должно быть понятно специалисту в данной области техники. Соответственно различным аспектам может быть использовано множество приемников (например, по одному на приемную антенну), и такие приемники могут осуществлять связь друг с другом, чтобы обеспечивать улучшенные оценки пользовательских данных. Демодулированные символы анализируются процессором 1814, который подобен процессору, описанному выше со ссылкой на фиг.17, и связан с памятью 1816, которая хранит информацию, относящуюся к терминалам, выделенным ресурсам, ассоциированным с терминалами, и т.п. Выходной сигнал для каждой антенны может совместно обрабатываться приемником 1810 и/или процессором 1814. Модулятор 1818 может мультиплексировать сигнал для передачи передатчиком 1820 через антенны 1808 к терминалам 1804.
Пункт 1802 доступа дополнительно содержит компонент 1822 связи с терминалами, который может быть процессором, отдельным или интегрированным с процессором 1814. Компонент 1822 связи с терминалами может получать информацию назначения ресурсов для терминалов, поддерживаемых соседними секторами. Дополнительно, компонент 1822 связи с терминалами может предоставлять информацию назначения соседним секторам для терминалов, поддерживаемых пунктом 1802 доступа. Информация назначения может быть предоставлена посредством сигнализации в обратном направлении.
Основываясь на информации относительно назначенных ресурсов, компонент 1822 связи с терминалами может управлять обнаружением передач от терминалов, поддерживаемых соседними секторами, а также декодированием принятых передач. Память 1816 может сохранять пакеты, принятые от терминалов, до приема информации назначения, необходимой для декодирования пакетов. Компонент 1822 связи с терминалами может также управлять передачей и приемом квитирований, указывающих на успешный прием и декодирование передач. Понятно, что компонент 1822 связи с терминалами может включать в себя код анализа передачи, который выполняет основанное на служебной программе управление во взаимосвязи с назначением ресурсов, идентификацией терминалов для гибкой передачи обслуживания, декодированием передач и т.п. Код анализа терминала может использовать методы, основанные на искусственном интеллекте, в связи с выполнением логического вывода и/или вероятностных определений, и/или статистических определений в связи с оптимизированной характеристикой терминала.
На фиг.19 показана приведенная для приема система 1900 беспроводной связи. Система 1900 беспроводной связи показывает одну базовую станцию и один терминал, в целях наглядности. Однако понятно, что система 1900 может включать в себя более одной базовой станции или пункта доступа и/или более одного терминала или пользовательского устройства, причем дополнительные базовые станции и/или терминалы могут быть, по существу, подобными или отличающимися от приведенных для примера базовой станции и терминала, описанных ниже. Кроме того, понятно, что базовая станция и/или терминал могут использовать системы и/или способы, описанные здесь, для облегчения беспроводной связи между ними.
Как показано на фиг.19, в нисходящей линии связи в пункте 1905 доступа процессор 1910 данных передачи (ТХ) принимает, форматирует, кодирует, перемежает и модулирует (или отображает на символы) данные трафика и обеспечивает символы модуляции («символы данных»). Модулятор 1915 символов принимает и обрабатывает символы данных и пилотные символы и обеспечивает поток символов. Модулятор 1915 символов мультиплексирует символы данных и пилотные символы и получает набор из N символов передачи. Каждый символ передачи может быть символом данных, пилотным символом или нулевым значением сигнала. Пилотные символы могут передаваться непрерывно в каждом периоде символа. Пилотные символы могут быть мультиплексированными с частотным разделением (FDM), мультиплексированными с ортогональным частотным разделением (ОFDM), мультиплексированными с временным разделением (ТDM) или мультиплексированными с кодовым разделением (СDM).
Блок передатчика (TMTR) 1920 принимает и преобразует поток символов в один или более аналоговые сигналы и дополнительно преобразует (например, усиливает, фильтрует и преобразует с повышением частоты) аналоговые сигналы для генерации сигнала нисходящей линии, подходящего для передачи по беспроводному каналу. Сигнал нисходящей линии затем передается через антенну 1925 к терминалам. В терминале 1930 антенна 1935 принимает сигнал нисходящей линии и выдает принятый сигнал на блок приемника (RCVR) 1940. Блок 1940 приемника преобразует (например, фильтрует, усиливает и преобразует с понижением частоты) принятый сигнал и оцифровывает преобразованный сигнал для получения выборок. Демодулятор 1945 символов получает N принятых символов и выдает принятые пилотные символы на процессор 1950 для оценивания канала. Демодулятор 1945 символов дополнительно принимает оценку частотного отклика для нисходящей линии с процессора 1950, выполняет демодуляцию данных над принятыми символами данных для получения оценок символов данных (которые являются оценками переданных символов данных) и выдает оценки символов данных на процессор 1955 RX-данных, который демодулирует (выполняет обращенное отображение символов), обращенно перемежает и декодирует оценки символов данных для восстановления переданных данных трафика. Обработка демодулятором 1945 символов и процессором 1955 RX-данных является комплементарной обработке модулятором 1915 символов и процессором 1910 ТX-данных соответственно в пункте 1905 доступа.
В восходящей линии процессор 1960 ТХ-данных обрабатывает данные трафика и обеспечивает символы данных. Модулятор 1965 символов принимает и мультиплексирует символы данных с пилотными символами, выполняет модуляцию и обеспечивает поток символов. Блок 1970 передатчика затем принимает и обрабатывает поток символов для генерации сигнала восходящей линии, который передается антенной 1935 в пункт 1905 доступа.
В пункте 1905 доступа сигнал восходящей линии из терминала 1930 принимается антенной 1925 и обрабатывается блоком 1975 приемника для получения выборок. Демодулятор 1980 символов затем обрабатывает выборки и обеспечивает оценки принятых пилотных символов и символов данных для восходящей линии. Процессор 1985 RX-данных обрабатывает оценки символов данных для восстановления данных трафика, переданных терминалом 1930. Процессор 1990 выполняет оценивание канала для каждого активного терминала, передающего по восходящей линии.
Процессоры 1990 и 1950 управляют (например, контролируют, координируют, организуют…) работой пункта 1905 доступа и терминала 1930 соответственно. Соответствующие процессоры 1990 и 1950 могут быть ассоциированы с блоками памяти (не показаны), которые хранят программные коды и данные. Процессоры 1990 и 1950 также могут выполнять вычисления для получения оценок частотного и импульсного откликов для восходящей линии и нисходящей линии соответственно.
Для системы множественного доступа (например, FDMA, OFDMA, CDMA, TDMA и т.п.) множество терминалов могут одновременно передавать по восходящей линии. Для такой системы пилотные поддиапазоны могут совместно использоваться различными терминалами. Методы оценивания каналов могут быть использованы в случаях, где пилотные поддиапазоны для каждого терминала охватывают всю рабочую полосу (возможно, кроме краев полосы). Такая структура пилотных поддиапазонов была бы желательной для получения частотного разнесения для каждого терминала. Способы, описанные здесь, могут быть реализованы различными средствами. Например, эти способы могут быть реализованы в аппаратных средствах, программном обеспечении или комбинации того и другого. Для аппаратной реализации блоки обработки, используемые для оценивания канала, могут быть реализованы на одной или более специализированных (ориентированных на приложение) интегральных схемах (ASIC), цифровых процессорах сигналов (DSP), цифровых устройствах обработки сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных блоках, спроектированных для выполнения описанных здесь функций, или комбинации указанных средств. В случае программного обеспечения реализация может быть осуществлена посредством модулей (например, процедур, функций и т.д.), которые выполняют описанные здесь функции. Коды программного обеспечения могут быть сохранены в блоке памяти и могут исполняться процессорами 1990 и 1950.
Должно быть понятно, что варианты осуществления, описанные здесь, могут быть реализованы аппаратными средствами, программным обеспечением, программно-аппаратным обеспечением, промежуточным программным обеспечением, микрокодом или любой комбинацией указанного. Когда системы и/или способы реализованы программным обеспечением, программно-аппаратным обеспечением, промежуточным программным обеспечением или микрокодом, программным кодом или сегментами кода, они могут быть сохранены на машиночитаемом носителе, таком как компонент памяти. Сегмент кода может представлять процедуру, функцию, подпрограмму, программу, стандартную программу, стандартную подпрограмму, модуль, компоновку программного обеспечения, класс или любую комбинацию инструкций, структур данных или программных операторов. Сегмент кода может быть связан с другим сегментом кода или аппаратной схемой путем передачи и/или приема информации, данных, аргументов, параметров или содержимого памяти. Информация, аргументы, параметры, данные и т.д. могут пропускаться, отсылаться или передаваться с использованием любых подходящих средств, включая совместное использование памяти, пересылку сообщений, пересылку маркеров, сетевую передачу и т.д.
Для реализации программным обеспечением способы, описанные здесь, могут быть реализованы с помощью модулей (например, процедур, функций и т.д.), которые выполняют функции, описанные здесь. Коды программного обеспечения могут быть сохранены в блоках памяти и могут исполняться процессорами. Блок памяти может быть реализован в процессоре или быть внешним относительно процессора, и в этом случае он может быть коммуникативно связан с процессором различными средствами, как известно в технике.
То, что описано здесь, включает в себя примеры одного или более вариантов осуществления. Разумеется, невозможно описать каждую мыслимую комбинацию компонентов или методологий для целей описания вышеупомянутых вариантов осуществления, но специалисту в данной области техники должно быть понятно, что возможны многие другие комбинации и перестановки различных вариантов осуществления. Соответственно, описанные варианты осуществления предназначены для охвата всех таких изменений, модификаций и вариаций, которые входят в объем приложенной формулы изобретения. Кроме того, в той степени, в которой термин «включает» используется как в детальном описании, так и в формуле изобретения, такой термин интерпретируется как «включающий в себя», подобно тому, как термин «содержащий» интерпретируется при использовании в качестве переходного слова в пункте формулы изобретения.
Ссылка А является презентацией, относящейся к аспектам, описанным здесь, и эта ссылка образует часть настоящей спецификации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА С МНОЖЕСТВОМ ВХОДОВ И МНОЖЕСТВОМ ВЫХОДОВ (MIMO) С МНОЖЕСТВОМ РЕЖИМОВ ПРОСТРАНСТВЕННОГО МУЛЬТИПЛЕКСИРОВАНИЯ | 2003 |
|
RU2330381C2 |
| СИСТЕМА С МНОЖЕСТВОМ ВХОДОВ И МНОЖЕСТВОМ ВЫХОДОВ (MIMO) С МНОЖЕСТВОМ РЕЖИМОВ ПРОСТРАНСТВЕННОГО МУЛЬТИПЛЕКСИРОВАНИЯ | 2003 |
|
RU2477001C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ПИЛОТ-СИГНАЛА В МНОГОАНТЕННОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2414060C2 |
| РАЗМЕЩЕНИЕ И СПОСОБ ПЕРЕДАЧИ УПРАВЛЯЮЩЕЙ ИНФОРМАЦИИ В СИСТЕМАХ БЕСПРОВОДНОЙ СВЯЗИ | 2008 |
|
RU2451404C2 |
| ВЫХОД ИЗ НЕСООТВЕТСТВИЯ РЕСУРСОВ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2421939C2 |
| КАНАЛ ПОДТВЕРЖДЕНИЯ ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2424621C2 |
| ХРАНЕНИЕ ЛОГАРИФМИЧЕСКИХ ОТНОШЕНИЙ ПРАВДОПОДОБИЯ В ПЕРЕМЕЖЕННОМ ВИДЕ ДЛЯ УМЕНЬШЕНИЯ АППАРАТНОЙ ПАМЯТИ | 2009 |
|
RU2451325C1 |
| СТРУКТУРА ПЕРЕДАЧИ, ПОДДЕРЖИВАЮЩАЯ МНОГОПОЛЬЗОВАТЕЛЬСКОЕ ПЛАНИРОВАНИЕ И ПЕРЕДАЧУ MIMO | 2006 |
|
RU2384949C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2009 |
|
RU2511718C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ СИГНАЛИЗАЦИИ КАНАЛА УПРАВЛЕНИЯ | 2006 |
|
RU2408990C2 |









Настоящее изобретение относится к беспроводной связи. Технический результат заявленного изобретения заключается в выборе оптимальной схемы демодуляции в системе приемника в зависимости от формата передачи принимаемых данных. Описаны системы и способы, которые облегчают выбор, в зависимости от кодовой скорости и порядка модуляции, соответствующего демодулятора для принятого пакета данных. Согласно различным аспектам описаны системы и/или способы, которые обеспечивают выбор оптимальной схемы демодуляции таким образом, что сложность приемника сигналов не увеличивается и достигается оптимальная характеристика пропускной способности при декодировании. 5 н. и 35 з.п. ф-лы, 19 ил.
1. Способ выбора демодулятора, причем способ содержит
прием формата пакета, который будет использоваться для демодуляции; и
выбор либо пространственного корректора минимальной среднеквадратичной ошибки (MMSE), либо сферического декодера (LSD) списка, на основе принятого формата пакета.
2. Способ по п.1, использующий LSD, когда канальная кодовая скорость, ассоциированная с форматом пакета, удовлетворяет пороговому диапазону, причем кодовая скорость представляет отношение числа битов, поступающих в кодер, к числу битов, выходящих из кодера.
3. Способ по п.2, в котором первый пороговый диапазон включает в себя канальную кодовую скорость, большую или равную двум третям.
4. Способ по п.2, дополнительно содержащий использование LSD для принятого пакета, который содержит кодовое слово, которое удовлетворяет пороговому значению точек кандидатов.
5. Способ по п.4, в котором пороговое значение равно 64 точкам кандидатов.
6. Способ по п.2, в котором пороговый диапазон включает в себя канальные кодовые скорости между двумя третями и значением, большим или равным половине.
7. Способ по п.6, дополнительно содержащий использование LSD для принятого пакета, который содержит кодовое слово, которое удовлетворяет пороговому значению точек кандидатов.
8. Способ по п.7, в котором пороговое значение равно 64 точкам кандидатов.
9. Способ по п.4, дополнительно содержащий использование LSD для формата пакета более низкого порядка модуляции, причем порядок модуляции представляет число битов, передаваемых символом модуляции.
10. Способ по п.9, в котором порядок модуляции соответствует 16-ичной квадратурной амплитудной модуляции (QAM).
11. Способ по п.1, использующий пространственный корректор минимальной среднеквадратичной ошибки (MMSE), если кодовая скорость, ассоциированная с форматом пакета, находится внутри порогового диапазона.
12. Способ по п.11, в котором пороговый диапазон канальной кодовой скорости включает в себя значения, большие чем половина, и меньшие чем две трети.
13. Способ по п.12, дополнительно содержащий использование пространственного корректора MMSE, когда порядок модуляции формата пакета соответствует 64 QAM.
14. Способ по п.1, дополнительно содержащий использование LSD, когда используется квадратурная фазовая манипуляция (QPSK).
15. Способ по п.9, дополнительно содержащий использование LSD для принятого пакета, который содержит кодовое слово с 64 точками кандидатов.
16. Способ по п.1, использующий пространственный корректор MMSE, когда эффективность пространственного корректора MMSE выше или равна эффективности LSD.
17. Способ по п.1, дополнительно содержащий автоматическое использование пространственного корректора MMSE после повторной передачи.
18. Способ по п.1, причем демодулятор работает в системе приемника с множеством входов и множеством выходов (MIMO).
19. Способ по п.18, дополнительно содержащий настройку числа точек кандидатов, подлежащих декодированию посредством операции LSD, путем сокращения числа передающих и приемных антенн в системе MIMO.
20. Устройство связи, содержащее
приемный компонент, который принимает формат пакета, используемый для демодуляции;
компонент анализа, который определяет оптимальную одну из множества схем демодуляции, выбранную из либо схемы пространственного корректора минимальной среднеквадратичной ошибки (MMSE), либо сферического декодера (LSD) списка, основываясь, по меньшей мере, частично на формате пакета; и
компонент демодуляции, который использует оптимальную схему демодуляции.
21. Устройство по п.20, в котором компонент анализа использует компонент логического вывода, причем компонент логического вывода использует, по меньшей мере, одно из априорного основанного на правилах классификатора, классификаторов экспертных систем, примитивных байесовских классификаторов, классификаторов максимума правдоподобия, классификаторов нейронных сетей, классификаторов вспомогательной векторной машины (SVM), классификаторов статистической модели языка и классификаторов дерева решений.
22. Устройство по п.20, в котором компонент анализа использует таблицу преобразования базы данных.
23. Устройство по п.20, в котором компонент анализа использует LSD, когда канальная кодовая скорость, ассоциированная с форматом пакета, удовлетворяет пороговому диапазону, причем кодовая скорость представляет отношение числа битов, входящих в декодер, к числу битов, выходящих из кодера.
24. Устройство по п.23, в котором пороговый диапазон включает в себя значения канальной кодовой скорости, большие или равные двум третям.
25. Устройство по п.23, в котором компонент демодуляции использует LSD для принятого пакета, который содержит кодовое слово, которое удовлетворяет пороговому значению точек кандидатов.
26. Устройство по п.25, в котором пороговое значение равно 64 точкам кандидатов.
27. Устройство по п.23, в котором пороговый диапазон включает в себя значение канальной кодовой скорости, которые меньше чем две трети, и больше или равны половине.
28. Устройство по п.20, в котором компонент демодуляции использует пространственный корректор минимальной среднеквадратичной ошибки (MMSE), если кодовая скорость, ассоциированная с форматом пакета, находится в пределах порогового диапазона.
29. Устройство по п.28, в котором пороговый диапазон канальной кодовой скорости включает в себя значения, большие чем половина, и меньшие чем две трети.
30. Устройство по п.20, в котором компонент демодулятора использует LSD, когда принятый пакет использует квадратурную фазовую манипуляцию (QPSK).
31. Устройство по п.30, в котором компонент демодулятора использует LSD для принятого пакета, который содержит кодовое слово с 64 точками кандидатов.
32. Устройство по п.20, в котором компонент демодулятора использует пространственный корректор MMSE, когда характеристика пропускной способности пространственного корректора MMSE выше или равна характеристике пропускной способности LSD.
33. Устройство по п.20, в котором компонент демодулятора автоматически использует пространственный корректор MMSE после повторной передачи пакета.
34. Машиночитаемый носитель, содержащий сохраненные на нем исполняемые компьютером инструкции для выполнения следующих действий:
прием формата пакета, который будет использоваться для демодуляции; и
выбор либо пространственного корректора минимальной среднеквадратичной ошибки (MMSE), либо сферического декодера (LSD) списка, основываясь на принятом формате пакета.
35. Машиночитаемый носитель по п.34, содержащий сохраненные на нем инструкции для демодуляции, по меньшей мере, одного кодового слова, сохраненного в принятом пакете, как функции, по меньшей мере, одного из порядка демодуляции принятого пакета или кодовой скорости, которая представляет эффективность, ассоциированную с декодером кодового слова.
36. Процессор, содержащий сохраненные на нем исполняемые компьютером инструкции для осуществления связи, с использованием устройства связи, посредством выполнения следующих действий:
прием формата пакета, который будет использоваться для демодуляции; и
выбор либо пространственного корректора минимальной среднеквадратичной ошибки (MMSE), либо сферического декодера (LSD) списка, основываясь на принятом формате пакета.
37. Процессор по п.36, содержащий сохраненные на нем инструкции для демодуляции принятого пакета как функции, по меньшей мере, одного из порядка демодуляции принятого пакета или кодовой скорости, которая представляет эффективность, ассоциированную с декодером кодового слова.
38. Устройство связи, содержащее
средство для приема пакета данных на мобильном устройстве, и
средство для выбора подходящего демодулятора, выбранного из либо пространственного корректора минимальной среднеквадратичной ошибки (MMSE), либо сферического декодера (LSD) списка, основываясь, по меньшей мере, частично на информации формата принятого пакета данных.
39. Устройство по п.38, дополнительно содержащее средство для использования демодулятора в соответствии со средством для выбора.
40. Устройство по п.38, дополнительно содержащее средство для логического вывода относительно подходящего демодулятора посредством, по меньшей мере, одного из априорного основанного на правилах классификатора, классификаторов экспертных систем, примитивных байесовских классификаторов, классификаторов максимума правдоподобия, классификаторов нейронных сетей, классификаторов вспомогательной векторной машины (SVM), классификаторов статистической модели языка или классификаторов дерева решений.
| WO 2005076491 A1, 18.08.2005 | |||
| БЕЗОПАСНЫЙ СПОСОБ ЭЛЕКТРИЧЕСКОГО ВЗРЫВАНИЯ ЗАРЯДОВ ЖИДКИХ ВЗРЫВЧАТЫХ ВЕЩЕСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2093784C1 |
| BENJEBBOUR A ET AL: "ON THE RELATION BETWEEN ORDERING METRICS FOR ZF AND MMSE SUCCESSIVE DETECTION IN MIMO SYSTEMS" IEICE TRANSACTIONS ON COMMUNICATIONS, COMMUNICATIONS SOCIETY, TOKYO, JP | |||
| Устройство для управления @ -пульсным выпрямителем | 1986 |
|
SU1363405A1 |

