Притязание на приоритет по 35 U.S.C. §119
Настоящая заявка на патент притязает на приоритет предварительной заявки США с порядковым номером 60/864557, озаглавленной "Ontime Symbol Level Interference Cancellation", поданной 6 ноября 2006 г., назначенной правопреемнику этой заявки и явно включенной в настоящий документ посредством ссылки.
Область техники, к которой относится изобретение
Настоящее раскрытие в целом относится к связи, а более конкретно к способам приема передачи в системе со многими входами и многими выходами (MIMO).
Уровень техники
Передача MIMO является передачей от нескольких (М) передающих антенн к нескольким (N) приемным антеннам. Например, передатчик может одновременно передавать M потоков данных из M передающих антенн. Эти потоки данных искажаются беспроводной средой и дополнительно ухудшаются из-за шума и помех. Приемник принимает переданные потоки данных посредством N приемных антенн. Принятый сигнал от каждой приемной антенны содержит масштабированные и запаздывающие версии переданных потоков данных. Переданные потоки данных, соответственно, рассредоточиваются среди N принятых сигналов от N приемных антенн. Приемник может тогда обработать N принятых сигналов с помощью пространственно-временного эквалайзера, чтобы восстановить переданные потоки данных.
Приемник может динамически выводить коэффициенты для пространственно-временного эквалайзера, чтобы учитывать колебания в свойствах сигнала. Эти свойства сигнала могут относиться к статистическим характеристикам канала и помех, пространственно-временной обработке переданных потоков данных и т.д. Выведение коэффициентов эквалайзера требует большого объема вычислений. Обновление этих коэффициентов эквалайзера для соответствия самым быстрым изменениям в свойствах сигнала может привести к очень сложному приемнику. Обновление этих коэффициентов эквалайзера на более низкой скорости может привести к ухудшению производительности.
Поэтому в данной области техники имеется потребность в способах для эффективного приема передачи MIMO.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В настоящем документе описываются способы для приема передачи MIMO с последовательным подавлением помех (SIC). Приемник может получать принятые данные для передачи MIMO, содержащей несколько кадров. Каждый кадр может отдельно кодироваться передатчиком и может отдельно декодироваться приемником. В одном исполнении приемник может обрабатывать принятые данные на основе входного фильтра, чтобы получить фильтрованные данные. Приемник может дополнительно обрабатывать фильтрованные данные на основе по меньшей мере одной первой матрицы объединителя, чтобы получить обнаруженные данные для первого кадра. Приемник может обрабатывать (например, демодулировать и декодировать) обнаруженные данные для первого кадра, чтобы получить декодированные данные для первого кадра. Приемник может затем обработать фильтрованные данные на основе по меньшей мере одной второй матрицы объединителя и декодированных данных для первого кадра, чтобы подавить помехи из-за первого кадра и получить обнаруженные данные для второго кадра. Приемник может обрабатывать обнаруженные данные для второго кадра, чтобы получить декодированные данные для второго кадра.
Входной фильтр может обрабатывать несвоевременные компоненты сигнала в принятых данных, чтобы получить фильтрованные данные. Каждая матрица объединителя может объединять своевременные компоненты сигнала в фильтрованных данных для разного каналообразующего кода, чтобы получить обнаруженные данные для каналообразующего кода. Своевременные и несвоевременные компоненты сигнала могут различаться на основе времени передачи. На приемнике своевременные компоненты сигнала могут содержать компоненты сигнала, относящиеся к нужному символу, который необходимо восстановить, а также к другим символам, переданным одновременно с нужным символом. Несвоевременные компоненты сигнала могут содержать компоненты сигнала, которые не являются своевременными компонентами сигнала, например компоненты сигнала, относящиеся к другим символам, переданным до и после нужного символа.
Матрицы объединителя могут быть функциями характерной для данных обработки на передатчике. Характерная для данных обработка может основываться на каналообразующих кодах, матрицах передачи, коэффициентах усиления и т.д. Единый входной фильтр может быть выведен и использован для всех каналообразующих кодов, тогда как для каждого каналообразующего кода может быть выведена особая матрица объединителя.
Для своевременного SIC помехи из-за своевременных компонентов сигнала в первом кадре могут оцениваться и подавляться в фильтрованных данных. Входной фильтр может обрабатывать принятые данные один раз, чтобы получить фильтрованные данные, и для каждого кадра может быть выведено отличное множество матриц объединителя и использовано для объединения фильтрованных данных, чтобы получить обнаруженные данные для этого кадра. Для полного SIC помехи из-за первого кадра для всей продолжительности входного фильтра могут оцениваться и подавляться в принятых данных, чтобы получить входные данные. Для второго кадра входной фильтр может обновляться, и входные данные могут обрабатываться с помощью обновленного входного фильтра, чтобы получить фильтрованные данные для второго кадра. Разное множество матриц объединителя может быть выведено для каждого кадра и использовано для объединения фильтрованных данных для этого кадра, чтобы получить обнаруженные данные для кадра.
Качество принятого сигнала у первого кадра может оцениваться на основе матрицы передачи для первого и второго кадров и предположения об отсутствии подавления помех в каком бы то ни было кадре. Качество принятого сигнала у второго кадра может оцениваться на основе измененной матрицы передачи, имеющей столбец, соответствующий первому кадру, установленный в ноль, и предположения о подавлении помех из-за своевременных компонентов сигнала в первом кадре.
Далее более подробно описываются различные особенности и признаки раскрытия изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 показывает блок-схему передатчика и приемника.
Фиг.2 иллюстрирует передачу MIMO-CDM.
Фиг.3 показывает блок-схему модулятора CDMA на передатчике.
Фиг.4 показывает исполнение приемника без SIC.
Фиг.5A показывает исполнение приемника с полным SIC.
Фиг.5B показывает исполнение приемника со своевременным SIC.
Фиг.5C показывает другое исполнение приемника со своевременным SIC.
Фиг.6 показывает процесс для восстановления передачи MIMO без SIC.
Фиг.7 показывает процесс для восстановления передачи MIMO с помощью SIC.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Описываемые в настоящем документе способы обработки на приемнике могут использоваться для различных систем связи, например систем множественного доступа с кодовым разделением каналов (CDMA), систем множественного доступа с временным разделением каналов (TDMA), систем множественного доступа с разделением каналов по частоте (FDMA), систем с ортогональным FDMA (OFDMA), систем FDMA с одной несущей (SC-FDMA) и т.д. Система CDMA использует мультиплексирование с кодовым разделением (CDM) и передает символы модуляции параллельно, используя разные каналообразующие коды. Система CDMA может реализовывать технологию радиосвязи, например широкополосный CDMA (W-CDMA), cdma2000 и т.д. CDMA2000 охватывает стандарты IS-2000, IS-856 и IS-95. Система TDMA может реализовывать технологию радиосвязи, такую как глобальная система мобильной связи (GSM). W-CDMA и GSM описываются в документах от организации, именуемой "Проект Партнерства Третьего Поколения" (3GPP). CDMA2000 описывается в документах от организации, именуемой "Второй Проект Партнерства Третьего Поколения" (3GPP2). Документы 3GPP и 3GPP2 являются общедоступными. Система OFDMA использует мультиплексирование с ортогональным частотным разделением каналов (OFDM) и передает символы модуляции в частотной области на ортогональных поднесущих. Система SC-FDMA использует мультиплексирование с разделением по частоте на одной несущей (SC-FDM) и передает символы модуляции во временной области на ортогональных поднесущих.
Описываемые в настоящем документе способы также могут использоваться для передач MIMO по нисходящей линии связи, а также восходящей линии связи. Нисходящая линия связи (или прямая линия связи) относится к линии связи от базовых станций к беспроводным устройствам, а восходящая линия связи (или обратная линия связи) относится к линии связи от беспроводных устройств к базовым станциям. Для ясности ниже описываются способы для передачи MIMO в системе CDMA, которая может реализовывать W-CDMA, cdma2000 или какую-нибудь другую технологию радиосвязи CDMA.
Фиг.1 показывает блок-схему передатчика 110 и приемника 150 для передачи MIMO. Для передачи по нисходящей линии связи передатчик 110 является частью базовой станции, а приемник 150 является частью беспроводного устройства. Для передачи по восходящей линии связи передатчик 110 является частью беспроводного устройства, а приемник 150 является частью базовой станции. Базовая станция является, как правило, стационарной станцией, которая взаимодействует с беспроводными устройствами и также может называться Узлом B, усовершенствованным Узлом B, точкой доступа и т.д. Беспроводное устройство может быть стационарным или мобильным и также может называться пользовательским оборудованием (UE), мобильной станцией, терминалом, станцией, абонентским модулем и т.д. Беспроводное устройство может быть сотовым телефоном, персональным цифровым помощником (PDA), беспроводным модемом, переносным компьютером, карманным устройством и т.д.
На передатчике 110 процессор 112 передаваемых данных (TX Data Proc) принимает данные трафика и сигнализацию, обрабатывает (например, кодирует, перемежает и посимвольно преобразует) принятые данные и выдает символы данных. Процессор 112 также формирует и мультиплексирует пилот-символы с символами данных. При использовании в данном документе символ данных является символом для данных трафика или сигнализации, пилот-символ является символом для пилот-сигнала, и символ обычно является комплексной величиной. Символы данных и пилот-символы могут быть символами модуляции из схемы модуляции, например PSK или QAM. Пилот-сигнал является данными, которые заранее известны как передатчику, так и приемнику. MIMO-процессор 114 передачи выполняет пространственную или пространственно-временную обработку над данными и пилот-символами, как описывается ниже, и выводит выходные символы в несколько (M) модуляторов 116a - 116m CDMA. Каждый модулятор 116 CDMA обрабатывает его выходные символы, как описывается ниже, и выдает выходные элементарные посылки ассоциированному блоку 118 передатчика (TMTR). Каждый блок 118 передатчика обрабатывает (преобразует в аналоговую форму, усиливает, фильтрует и преобразует с повышением частоты) его выходные элементарные посылки и формирует модулированный сигнал. M модулированных сигналов от M блоков 118a - 118m передатчиков передаются из M антенн 120a - 120m соответственно.
На приемнике 150 несколько (N) антенн 152a - 152n принимают переданные сигналы через различные трассы распространения в беспроводной среде и выдают N принятых сигналов N блокам 154a - 154n приемников (RCVR) соответственно. Каждый блок 154 приемника обрабатывает (например, фильтрует, усиливает, преобразует с понижением частоты и оцифровывает) его принятый сигнал и выдает принятые выборки канальному процессору 156 и эквалайзеру/демодулятору (Demod) 160 CDMA. Процессор 156 выводит коэффициенты для входного фильтра/эквалайзера и коэффициенты для одной или нескольких матриц объединителя, как описывается ниже. Блок 160 выполняет коррекцию над принятыми выборками с помощью входного фильтра, выполняет демодуляцию CDMA над отфильтрованными выборками и выдает отфильтрованные символы. MIMO-процессор 170 приема (RX) объединяет фильтрованные символы по пространственному измерению и выдает обнаруженные символы, которые являются оценками переданных символов данных. Процессор 172 принимаемых данных обрабатывает (например, посимвольно восстанавливает, устраняет перемежение и декодирует) обнаруженные символы и выдает декодированные данные. В общем, обработка эквалайзером/демодулятором 160 CDMA, MIMO-процессором 170 приема и процессором 172 принимаемых данных является комплементарной к обработке модулятором 116 CDMA, MIMO-процессором 114 передачи и процессором 112 передаваемых данных соответственно на передатчике 110.
Контроллеры/процессоры 130 и 180 руководят работой различных блоков обработки на передатчике 110 и приемнике 150 соответственно. Запоминающие устройства 132 и 182 хранят данные и программные коды для передатчика 110 и приемника 150 соответственно.
Фиг.2 иллюстрирует передачу MIMO-CDM. Для CDM вплоть до C символов могут быть отправлены одновременно через одну передающую антенну с помощью C каналообразующих кодов, где в общем случае C≥1. Эти каналообразующие коды могут быть ортогональными кодами с переменным коэффициентом расширения (OVSF) в W-CDMA, кодами Уолша в cdma2000, другими ортогональными кодами или квазиортогональными кодами, псевдослучайными кодами и т.д. Каждый каналообразующий код является особой последовательностью элементарных посылок. Количество элементарных посылок в последовательности является длиной или коэффициентом расширения с помощью каналообразующего кода. В общем, для каждой передающей антенны может использоваться любое множество из одного или нескольких каналообразующих кодов, и каналообразующие коды могут обладать одинаковыми или разными коэффициентами расширения. Для простоты нижеследующее описание допускает, что каналообразующие коды обладают одинаковым коэффициентом расширения. Одно и то же множество из C каналообразующих кодов может повторно использоваться для каждой из M передающих антенн. Для MIMO вплоть до M символов могут быть отправлены одновременно через M передающих антенн. Для MIMO-CDM вплоть до C·M символов могут быть отправлены одновременно через M передающих антенн с помощью C каналообразующих кодов. Обработка MIMO может выполняться отдельно для каждого из C каналообразующих кодов. Обработка MIMO выполняется на всех M передающих антеннах для каждого каналообразующего кода. Обработка CDM может выполняться отдельно для каждой из M передающих антенн. Обработка CDM выполняется для всех C каналообразующих кодов для каждой передающей антенны.
Фиг.3 показывает блок-схему модулятора 116 CDMA для одной передающей антенны m, где m∈{1,…,M}. Модулятор 116 CDMA может использоваться для каждого из модуляторов 116a - 116m CDMA на фиг.1. Модулятор 116 CDMA включает в себя процессор 310 данных для каждого каналообразующего кода, используемый для данных трафика и/или сигнализации, и процессор 320 пилот-сигнала для пилот-сигнала.
В процессоре 310 данных блок 312 расширения расширяет выходные символы d m,c(s) для данных с помощью каналообразующего кода c, имеющего последовательность элементарных посылок v c(k), где s - индекс символа, а k - индекс элементарной посылки. Умножитель 314 масштабирует результат из блока 312 расширения с помощью коэффициента g m,c усиления и выдает элементарные посылки данных для каналообразующего кода c. В процессоре 320 пилот-сигнала блок 322 расширения расширяет выходные символы d m,p(s) для пилот-сигнала с помощью каналообразующего кода p для пилот-сигнала. Умножитель 324 масштабирует результат из блока 322 расширения с помощью коэффициента g m,p усиления и выдает элементарные посылки пилот-сигнала. Коэффициенты g m,c и g m,p усиления определяют величину мощности передачи, используемую соответственно для каналообразующего кода c и пилот-сигнала. Сумматор 330 суммирует элементарные посылки данных и пилот-сигнала для всех каналообразующих кодов. Скремблер 332 умножает результат сумматора 330 на последовательность p(k) скремблирования для передатчика 110 и выдает выходные элементарные посылки y m(k) для передающей антенны m.
В общем, любое количество и любые коды из C каналообразующих кодов могут использоваться для каждой из M передающих антенн. В одном исполнении одинаковый каналообразующий код используется для пилот-сигнала для всех M передающих антенн. В другом исполнении M каналообразующих кодов используются для пилот-сигнала для M передающих антенн, и оставшиеся C-M каналообразующих кодов могут повторно использоваться для каждой из M передающих антенн. Одна и та же последовательность скремблирования может использоваться для всех M передающих антенн, как показано на фиг.3. В качестве альтернативы, для каждой передающей антенны может использоваться разная последовательность скремблирования. Расширение спектра и скремблирование также могут выполняться другими способами.
Канал MIMO образуется средой распространения между M передающими антеннами на передатчике 110 и N приемными антеннами на приемнике 150. L символов данных могут отправляться параллельно из M передающих антенн для каждого каналообразующего кода, где 1≤L≤min{M,N}. Приемник 150 может оценивать производительность (например, пропускную способность) канала MIMO для разных значений L (и по возможности разных матриц/векторов передачи) и может выбирать значение L (и матрицу/вектор передачи), которое обеспечивает наилучшую производительность.
Передатчик 110 может выполнять пространственную обработку на передатчике для каждого каналообразующего кода c в каждом периоде s символа следующим образом:
d c(s)= B c b c(s), для c=1,…,C, Ур. (1)
где b c(s)=[ b 1,c(s) b 2,c(s) … b L,c(s)]T - вектор L×1 символов данных,
B c - матрица M×L передачи для каналообразующего кода c,
d c(s)=[ d 1,c(s) d 2,c(s) … b M,c(s)]T - вектор M×1 выходных символов, и
“ T ” обозначает транспозицию.
Каждый элемент в b c(s) может соответствовать разному потоку данных. Потоки данных могут иметь разные коэффициенты усиления, и в этом случае матрица B c может иметь разные столбцовые нормы для разных потоков данных. Уравнение (1) показывает пространственное кодирование с помощью B c. Также может выполняться пространственно-временное кодирование, например пространственно-временное разнесение передачи (STTD), но оно не показано в уравнении (1).
Разные матрицы передачи могут использоваться для разных режимов MIMO, например разнесение передачи замкнутого цикла (CLTD), регулирование скорости передачи данных по каждой антенне (PARC), пространство-время, с разделением на уровни лабораторией Белла повторным использованием кода (CRBLAST), адаптивный массив двойной передачи (D-TxAA) и т.д. Таблица 1 перечисляет некоторые режимы MIMO и для каждого режима предоставляет L, M,
B
c и источник символов данных. В Таблице 1
B
cltd может быть вектором 2×1, выбранным из множества  .
B
d-txaa может быть матрицей 2×2, выбранной из множества
.
B
d-txaa может быть матрицей 2×2, выбранной из множества  .
I
- единичная матрица с единицами по диагонали и нулями в других местах.
.
I
- единичная матрица с единицами по диагонали и нулями в других местах.
Кадр также может называться пакетом, транспортным блоком, блоком данных, кодовым словом, потоком, потоком данных, пространственным потоком и т.д. Кадр может отдельно кодироваться передатчиком 110 и отдельно декодироваться приемником 150.
Передатчик 110 может выполнять обработку CDMA для каждой передающей антенны m в каждом периоде s символа следующим образом:

где период s символа, соответствующий периоду k элементарной посылки, задается с помощью  . Коэффициент g
m,c усиления может быть установлен равным нулю для каждого каналообразующего кода, который не используется.
. Коэффициент g
m,c усиления может быть установлен равным нулю для каждого каналообразующего кода, который не используется.
Если используются каналообразующие коды с разными коэффициентами расширения, то обработка CDMA для передающей антенны m может быть выражена в виде:

где Cc - коэффициент расширения с помощью каналообразующего кода c, и
Npc - количество каналообразующих кодов, используемых для передающей антенны m.
Для простоты нижеследующее описание допускает, что для каждой передающей антенны используются каналообразующие коды с коэффициентом C расширения. В уравнении (2) выходной символ d m,c(s) расширяется с помощью каналообразующего кода c, имеющего коэффициент C расширения, и масштабируется на коэффициент g m,c усиления для получения элементарных посылок данных. Расширение спектра достигается путем дублирования выходного символа C раз и умножения C дублированных выходных символов на C элементарных посылок каналообразующего кода c. Элементарные посылки данных и пилот-сигнала для всех C каналообразующих кодов суммируются и дополнительно скремблируются с помощью последовательности p(k) скремблирования для получения выходных элементарных посылок y m(k) для передающей антенны m. Такая же обработка CDMA выполняется для каждой из M передающих антенн.
Принятые выборки на приемнике 150 в каждом периоде k элементарной посылки могут быть выражены в виде:

где y (k) - вектор T×1 выходных элементарных посылок, где T описывается ниже,
H - матрица R×T характеристик канала, где R описывается ниже,
x (k) - вектор R×1 принятых выборок, и
n (k) - вектор R×1 помех.
Приемник 150 может оцифровать принятый сигнал от каждой приемной антенны на большей в K раз скорости следования элементарных посылок, где K - фактор супердискретизации и в общем случае K≥1. В каждом периоде k элементарной посылки приемник 150 может получать E·K выборок от каждого приемника 154 и формировать x (k) путем накопления N·E·K выборок от N приемников 154a - 154n. E - длина входного эквалайзера в приемнике 150, в количестве элементарных посылок. В общем, E≥1 и может выбираться на основе компромисса между сложностью приемника и производительностью. x (k) включает в себя R принятых выборок от N приемных антенн для E периодов элементарных посылок, где R=N·E·K.
Матрица H содержит импульсные характеристики канала во временной области для всех пар передающих и приемных антенн. Как показано на фиг.1, имеется канал распространения между каждой передающей антенной и каждой приемной антенной или всего M·N каналов распространения между M передающими антеннами и N приемными антеннами. Каждый канал распространения обладает индивидуальной импульсной характеристикой, определенной беспроводной средой. Характеристика канала с одним входом и многими выходами (SIMO) между каждой передающей антенной m и N приемными антеннами может быть задана с помощью R×Tm подматрицы H m. Количество строк в H m определяется количеством вхождений в x (k). Количество столбцов в H m определяется длиной E эквалайзера, а также продолжительностью импульсных характеристик между передающей антенной m и N приемными антеннами. Tm может задаваться следующим образом:

где  - продолжительность импульсной характеристики между передающей антенной m и приемной антенной n, в количестве элементарных посылок, и обозначает оператор верхнего значения.
- продолжительность импульсной характеристики между передающей антенной m и приемной антенной n, в количестве элементарных посылок, и обозначает оператор верхнего значения.
Матрица H состоит из M подматриц H m, для m=1,…,M, следующим образом:

H имеет размерность R×T, где T=T1+T2+…+TM.
Вектор y (k) состоит из M субвекторов y m(k), для m=1,…,M, для M передающих антенн. Каждый субвектор y m(k) включает в себя Tm выходных элементарных посылок от одной передающей антенны m, центрированных в периоде k элементарной посылки. Вектор y (k) и субвектор y m(k) могут быть выражены в виде:

Уравнение (3) также может быть выражено в виде:

Для показанной в уравнении (7) модели в каждом периоде k элементарной посылки Tm выходных элементарных посылок отправляются из каждой передающей антенны m и через канал SIMO с характеристикой H m к N приемным антеннам. Принятые выборки в x (k) включают в себя вклады от всех M передающих антенн. x (k), y (k) и H могут быть относительно большими. В качестве примера, с M=2, N=2, K=2, E=20, T=48 и R=80 y (k) может быть вектором 48×1, H может быть матрицей 80×48 и x (k) может быть вектором 80×1.
Шум может предполагаться в виде стационарного комплексного случайного вектора с

где E { } - операция математического ожидания, 0 - вектор из всех нулей, R nn - ковариационная матрица R×R шума, и “ H ” обозначает сопряженную транспозицию. Уравнения (8) и (9) указывают, что шум имеет нулевое среднее и ковариационную матрицу R nn.
Приемник 150 может восстанавливать символы данных в b c(s) для каждого каналообразующего кода c путем фильтрации принятых выборок в x (k) с набором из L фильтров для каналообразующего кода c и затем сужения по спектру и дескремблирования отфильтрованных выборок следующим образом:
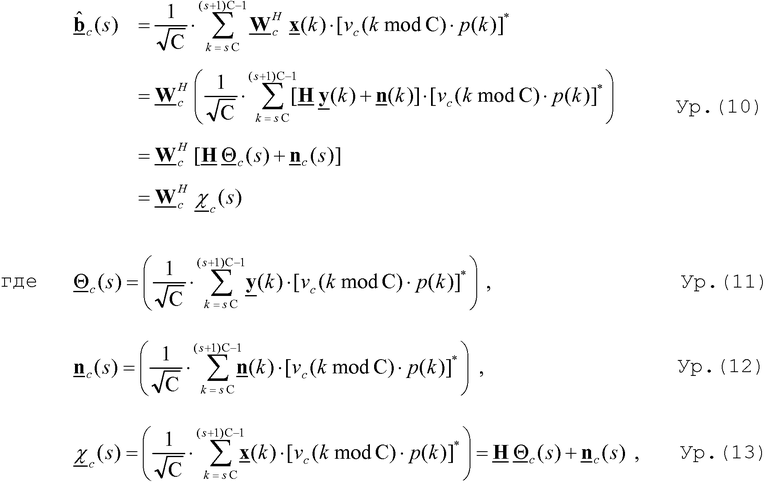
W c - общий фильтр R×L для каналообразующего кода c,
 - вектор L×1 обнаруженных символов и является оценкой
b
c(s), и
- вектор L×1 обнаруженных символов и является оценкой
b
c(s), и
“ * ” обозначает комплексно сопряженное число.
Θ
c(s) - вектор T×1 суженных по спектру символов для каналообразующего кода c и получается на основе переданных элементарных посылок.
n
c(s) - вектор R×1 помех для каналообразующего кода c после дескремблирования и сужения по спектру.
n
c(s) сохраняет статистику
n
(k), которые являются независимыми от каналообразующего кода c.  - вектор R×1 суженных по спектру символов для каналообразующего кода c и получается на основе принятых выборок.
W
c включает в себя набор из L фильтров для каналообразующего кода c. Уравнение (10) указывает, что обработка с
W
c может равноценно выполняться на суженных по спектру символах в
- вектор R×1 суженных по спектру символов для каналообразующего кода c и получается на основе принятых выборок.
W
c включает в себя набор из L фильтров для каналообразующего кода c. Уравнение (10) указывает, что обработка с
W
c может равноценно выполняться на суженных по спектру символах в  вместо принятых выборок в
x
(k).
вместо принятых выборок в
x
(k).
Фильтр W c может быть фильтром Винера, который может получаться как:


 - матрица R×M, содержащая M "своевременных" столбцов из
H
, и
- матрица R×M, содержащая M "своевременных" столбцов из
H
, и
G c - матрица M×M усилений для каналообразующего кода c.
В уравнении (15) F - относительно большая матрица R×M, которая не зависит от каналообразующего кода. В уравнении (16) Δ c - небольшая матрица M×L, которая содержит все зависимые от кода матрицы в W c. Выведение уравнений с (14) по (18) подробно описывается в принадлежащей тому же правообладателю заявке на патент США с порядковым номером 11/564261, озаглавленной "Multi-Stage Receiver for Wireless Communication", поданной 28 ноября 2006 г.
Уравнения с (10) по (18) указывают, что обработка на приемнике 150 может выполняться в два этапа. Первый этап фильтрует принятые выборки x (k) с помощью входного фильтра F , который не зависит от каналообразующего кода, и дополнительно суживает по спектру и дескремблирует фильтрованные выборки для получения фильтрованных символов. Один входной фильтр может использоваться для всех каналообразующих кодов. Второй этап объединяет фильтрованные символы с матрицей Δ c объединителя для каждого каналообразующего кода c, чтобы получить обнаруженные символы для этого каналообразующего кода. Входной фильтр и матрицы объединителя могут обновляться отдельно на одинаковой скорости или разных скоростях.
Многоэтапная обработка на приемнике может выполняться различными способами. В нижеследующем описании пилот-символы предполагаются отправляемыми с помощью матрицы
B
c=
I
передачи и с использованием одного и того же каналообразующего кода p для каждой из M передающих антенн. Пилот-символы также предполагаются некоррелированными или ортогональными, чтобы  , где
b
p(s) - вектор M×1 пилот-символов, отправленных из M передающих антенн в периоде s символа.
, где
b
p(s) - вектор M×1 пилот-символов, отправленных из M передающих антенн в периоде s символа.
В одном исполнении приемника входной фильтр F выводится и используется для первого этапа (например, для блока 160 на фиг.1) и матрица Δ c объединителя вычисляется для каждого каналообразующего кода и используется для второго этапа (например, для блока 170 на фиг.1).
Для обучения на уровне символа фильтр может быть выведен на основе суженных по спектру пилот-символов, используя критерий наименьших квадратов следующим образом:

где  - вектор R×1 суженных по спектру пилот-символов, и
- вектор R×1 суженных по спектру пилот-символов, и
W p - матрица R×M фильтра, выведенная на основе пилот-символов.
W
p может выводиться с помощью обучения на уровне символа следующим образом. Суженные по спектру пилот-символы  могут получаться из принятых выборок, как показано в уравнении (13), хотя и с помощью каналообразующего кода p пилот-сигнала вместо каналообразующего кода c. R×R векторное произведение
могут получаться из принятых выборок, как показано в уравнении (13), хотя и с помощью каналообразующего кода p пилот-сигнала вместо каналообразующего кода c. R×R векторное произведение
 может быть вычислено и усреднено на достаточном количестве пилот-символов. R×M векторное произведение
может быть вычислено и усреднено на достаточном количестве пилот-символов. R×M векторное произведение 
 также может быть вычислено и усреднено.
W
p затем может быть вычислено на основе двух усредненных векторных произведений.
также может быть вычислено и усреднено.
W
p затем может быть вычислено на основе двух усредненных векторных произведений.
Для обучения на уровне элементарной посылки фильтр может быть выведен на основе принятых выборок, используя критерий наименьших квадратов следующим образом:

где b p·v p (s)·p(k) - вектор M×1 элементарных посылок пилот-сигнала, полученный путем расширения спектра и скремблирования пилот-символов.
W
p может выводиться с помощью обучения на уровне элементарной посылки следующим образом. R×R векторное произведение
x
(k)
x
H(k) может быть вычислено на основе принятых выборок и усреднено на достаточном количестве пилот-символов. R×M векторное произведение
x
(k)·v
p
(s)·p(k) также может быть вычислено и усреднено.
W
p затем может быть вычислено на основе двух усредненных векторных произведений.
W
p также может выводиться на основе рекурсивного метода наименьших квадратов (RLS), блочного метода наименьших квадратов или других способов, известных в данной области техники.
Входной фильтр F может выводиться следующим образом:

G p - матрица M×M усилений для пилот-сигнала.
Матрица Δ c объединителя может выводиться следующим образом:

Как показано в уравнении (23), матрица Δ
c объединителя для каждого каналообразующего кода c может выводиться на основе
P
p, матриц
G
p и
G
c усилений для пилот-сигнала и данных и матрицы
B
c передачи для каналообразующего кода c.  также называется отношением трафика к пилот-сигналу и может быть известно (например, посредством сигнализации) или оценено приемником. Обычно достаточно оценить отношение трафика к пилот-сигналу
также называется отношением трафика к пилот-сигналу и может быть известно (например, посредством сигнализации) или оценено приемником. Обычно достаточно оценить отношение трафика к пилот-сигналу  и
G
p и
G
c не нужно оценивать отдельно.
и
G
p и
G
c не нужно оценивать отдельно.
Приемник 150 может восстанавливать символы данных в b c (s) следующим образом:

В уравнении (24) приемник 150 может фильтровать принятые выборки x (k) с помощью входного фильтра F , затем сузить по спектру и дескремблировать фильтрованные выборки для каждого каналообразующего кода c и затем объединить фильтрованные символы для каждого каналообразующего кода с матрицей Δ c объединителя. В уравнении (25) приемник 150 может сузить по спектру и дескремблировать принятые выборки для каждого каналообразующего кода c, затем отфильтровать суженные по спектру символы для каждого каналообразующего кода с помощью входного фильтра F , а затем объединить фильтрованные символы для каждого каналообразующего кода c с матрицей Δ c объединителя.
В другом исполнении приемника W p используется в качестве входного фильтра для первого этапа. Матрица D c объединителя вычисляется для каждого каналообразующего кода c и используется для второго этапа.
Фильтрованные символы, полученные с помощью W p, могут быть выражены в виде:

z c(s) - вектор M×1 фильтрованных символов для каналообразующего кода c.
Символы данных в b c(s) могут быть получены следующим образом:

где D c - матрица M×L объединителя для каналообразующего кода c.
Матрица D c объединителя может выводиться на основе критерия минимальной среднеквадратической ошибки (MMSE) следующим образом:

Как показано в уравнении (27), M×L матрица
A
c может вычисляться для каждого каналообразующего кода c на основе (i) матрицы
A
p, оцененной из пилот-символов или элементарных посылок и применимой для всех каналообразующих кодов, и (ii) отношения трафика к пилот-сигналу  и матрицы
B
c передачи, которые специфичны для каналообразующего кода c. Как показано в уравнении (30), матрица
D
c объединителя может вычисляться для каждого каналообразующего кода c на основе (i) ковариационной матрицы
R
nn,p шума, которая применима для всех каналообразующих кодов, и (ii) матрицы
A
c, вычисленной для каналообразующего кода c.
и матрицы
B
c передачи, которые специфичны для каналообразующего кода c. Как показано в уравнении (30), матрица
D
c объединителя может вычисляться для каждого каналообразующего кода c на основе (i) ковариационной матрицы
R
nn,p шума, которая применима для всех каналообразующих кодов, и (ii) матрицы
A
c, вычисленной для каналообразующего кода c.
Матрица D c объединителя также может оцениваться для каждого каналообразующего кода c следующим образом:

где R zz - ковариационная матрица M×M для z c(s).
Приемник 150 может восстанавливать символы данных в b c(s) следующим образом:

В уравнении (34) приемник 150 может фильтровать принятые выборки x (k) с помощью входного фильтра W p, затем сузить по спектру и дескремблировать фильтрованные выборки для каждого каналообразующего кода c и затем объединить фильтрованные символы для каждого каналообразующего кода с матрицей D c объединителя. В уравнении (35) приемник 150 может сузить по спектру и дескремблировать принятые выборки для каждого каналообразующего кода c, затем отфильтровать суженные по спектру символы для каждого каналообразующего кода с помощью входного фильтра W p, а затем объединить фильтрованные символы для каждого каналообразующего кода c с матрицей D c объединителя.
В обоих описанных выше исполнениях приемника входной фильтр F или W p может рассматриваться в качестве эквалайзера для "многолучевых" размерностей принятых сигналов. Матрица Δ c или D c объединителя работает с фильтрованными символами из входного фильтра и может рассматриваться в качестве соответствующей обработки для своевременных размерностей принятых сигналов. Обработка в приемнике также может выполняться в несколько этапов другими способами.
Приемник 150 может оценивать качество принятого сигнала, которое может измеряться с помощью отношения уровня сигнала к совокупному уровню взаимных помех и шумов (SINR) или какого-нибудь другого параметра. Обнаруженные символы из уравнения (29) могут быть выражены в виде:

SINR ℓ-го элемента в  ,
,  , может быть выражено в виде:
, может быть выражено в виде:

 является SINR ℓ-го потока данных, отправленного с помощью каналообразующего кода c, и может использоваться для выбора скорости передачи данных для этого потока данных. SINR для каждого каналообразующего кода c зависит от матрицы
B
c передачи, используемой для этого каналообразующего кода. Приемник 150 может определять SINR для разных возможных матриц передачи и выбирать матрицу передачи с наибольшим SINR. Приемник 150 может отправлять информацию обратной связи передатчику 110. Эта информация обратной связи может содержать матрицу передачи, выбранную для каждого каналообразующего кода, SINR или скорость передачи данных для каждого каналообразующего кода, средние SINR или скорость передачи данных для всех каналообразующих кодов и т.д.
является SINR ℓ-го потока данных, отправленного с помощью каналообразующего кода c, и может использоваться для выбора скорости передачи данных для этого потока данных. SINR для каждого каналообразующего кода c зависит от матрицы
B
c передачи, используемой для этого каналообразующего кода. Приемник 150 может определять SINR для разных возможных матриц передачи и выбирать матрицу передачи с наибольшим SINR. Приемник 150 может отправлять информацию обратной связи передатчику 110. Эта информация обратной связи может содержать матрицу передачи, выбранную для каждого каналообразующего кода, SINR или скорость передачи данных для каждого каналообразующего кода, средние SINR или скорость передачи данных для всех каналообразующих кодов и т.д.
Передатчик 110 может отправить L кодированных кадров или потоков данных приемнику 150, используя любой из режимов MIMO, показанных в Таблице 1. Приемник 150 может выполнять линейное MIMO обнаружение в два этапа - входная фильтрация в одном этапе и объединение в другом этапе, как описано выше. Приемник 150 может получать обнаруженные символы для всех L кадров из линейного обнаружения MIMO и может обрабатывать эти обнаруженные символы для восстановления L кадров.
Приемник 150 также может выполнять обнаружение MIMO с помощью SIC. В этом случае приемник 150 может выполнить линейное обнаружение MIMO, а затем обработать обнаруженные символы для восстановления одного кадра. Если кадр декодируется правильно, то приемник 150 может оценить и подавить помехи из-за этого кадра. Приемник 150 может затем повторить ту же обработку для следующего кадра. Каждый кадр, который восстанавливается позднее, может испытывать меньше помех и поэтому наблюдать более высокое SINR.
Для SIC L кадров, отправленных одновременно в передаче MIMO, могут достичь разных SINR. SINR каждого кадра может зависеть от (i) SINR этого кадра с линейным обнаружением MIMO, и (ii) конкретного порядка, в котором восстанавливаются L кадров. Для каждого кадра может определяться индикатор качества канала (CQI) на основе SINR, достигнутого этим кадром. CQI для L кадров могут вычисляться путем принятия во внимание факта, что восстановленный первым кадр не будет извлекать выгоду от SIC, тогда как каждый кадр, восстановленный позднее, может извлекать выгоду от SIC.
Приемник 150 может выполнять следующие задачи для обнаружения MIMO с SIC:
1. Непрерывно оценивать приемлемые скорости передачи данных для L кадров и формировать и отправлять соответствующие отчеты CQI.
2. Когда приемник 150 планируется для передачи данных и несколько кадров отправляются одновременно, выполнять обнаружение MIMO с подавлением каждого правильно декодированного кадра.
Две задачи, описанные выше, могут предполагать конкретное отношение трафика к пилот-сигналу  , которое применимо к приемнику 150, когда тот запланирован для передачи данных. Отношение трафика к пилот-сигналу может использоваться для выведения матриц объединителя и для оценки SINR. Для простоты нижеследующее описание допускает, что каждый кадр отправляется с помощью одного столбца из M×L матрицы
B
c передачи.
, которое применимо к приемнику 150, когда тот запланирован для передачи данных. Отношение трафика к пилот-сигналу может использоваться для выведения матриц объединителя и для оценки SINR. Для простоты нижеследующее описание допускает, что каждый кадр отправляется с помощью одного столбца из M×L матрицы
B
c передачи.
В одном исполнении приемник 150 может выполнять полное SIC, которое является оценкой и подавлением помех на всей или значительной части продолжительности входного фильтра. Для полного SIC приемник 150 может правильно декодировать кадр 1 первым и может затем оценить помехи из-за кадра 1 с помощью кодирования, модулирования, расширения спектра и скремблирования декодированного кадра 1 так же, как это выполнялось передатчиком 110, для получения выходных элементарных посылок, переданных для кадра 1. Приемник 150 может затем свернуть выходные элементарные посылки с помощью матрицы характеристик канала, чтобы оценить помехи из-за кадра 1, следующим образом:

где y 1(k) - вектор T×1 выходных элементарных посылок для кадра 1,
 - матрица R×T оценки канала, которая является оценкой
H
, и
- матрица R×T оценки канала, которая является оценкой
H
, и
i 1(k) - вектор R×1 помех из-за кадра 1.
Приемник 150 может затем подавить помехи из-за кадра 1 следующим образом:

где x 1(k) - вектор R×1 входных выборок, которые являются оценками принятых выборок с непереданным кадром 1.
Приемник 150 может затем обработать входные выборки x 1(k) таким же образом, что и принятые выборки x (k), чтобы восстановить другой кадр 2. Для кадра 2 приемник 150 может пересчитать входной фильтр F или W p на основе входных выборок x 1(k) и может затем отфильтровать входные выборки с помощью нового входного фильтра, чтобы получить фильтрованные символы. Приемник 150 также может пересчитать матрицу Δ c или D c объединителя для каждого каналообразующего кода c и затем объединить фильтрованные символы с новой матрицей объединителя для получения обнаруженных символов для каналообразующего кода c для кадра 2.
Для полного SIC каждый кадр ассоциируется с входным фильтром и множеством матриц объединителя, которые могут выводиться специально для этого кадра. Конкретный порядок, в котором восстанавливаются L кадров, может влиять на входной фильтр и матрицы объединителя для каждого кадра. Например, если отправляются два кадра 1 и 2, то входной фильтр и матрицы объединителя для каждого кадра могут отличаться в зависимости от того, восстанавливается ли кадр 1 перед кадром 2 или наоборот. Кроме того, выбор матрицы B c передачи также является значимым. Входной фильтр, вычисленный после подавления помех, может отличаться для разных матриц передачи вследствие измененной статистики сигнала.
Для сообщения CQI желательно оценивать SINR у L кадров для отражения любых выигрышей, обусловленных подавлением помех. SINR каждого кадра с линейным обнаружением MIMO может оцениваться на основе пилот-символов и предположения об отношении трафика к пилот-сигналу. Оценка SINR может быть относительно точной для кадра, восстановленного первым, который не извлекает выгоду от SIC. Однако оценка SINR для каждого кадра, восстановленного позднее, может быть неточной, поскольку выгоды от SIC могут быть выявлены, только когда фактически происходит подавление помех, которое может выполняться, только когда приемник 150 планируется для передачи данных. Приемник 150 может непрерывно оценивать SINR и сообщать CQI, тогда как передача данных может происходить нерегулярно. Таким образом, желательно оценивать SINR как можно точнее, даже когда не произошла передача данных.
Приемник 150 может оценивать SINR у L кадров различными способами. В первом исполнении приемник 150 может оценивать SINR каждого кадра посредством параметрического вычисления входного фильтра и допущения полного подавления в каждом восстановленном кадре. Во втором исполнении приемник 150 может оценивать SINR каждого кадра путем подавления только известных компонентов принятых сигналов, например пилот-сигнала. Это исполнение может обеспечить нижнюю границу достижимых SINR. В третьем исполнении приемник 150 может оценивать SINR каждого кадра путем подавления только своевременных компонентов сигнала у прежних восстановленных кадров, если имеются, как описывается ниже. Приемник 150 может выполнять полное подавление, когда принимается передача данных. Третье исполнение может обеспечить более высокую нижнюю границу достижимых SINR, чем второе исполнение.
В другом исполнении приемник 150 может выполнять своевременное SIC, которое является оценкой и подавлением помех из-за своевременных компонентов сигнала каждого восстановленного кадра. Для своевременного SIC приемник 150 может правильно декодировать кадр 1 первым и затем может оценить помехи из-за кадра 1 путем кодирования и модулирования декодированного кадра 1, чтобы получить восстановленные символы данных для кадра 1. Приемник 150 затем может оценить помехи из-за кадра 1 на основе восстановленных символов данных. Приемник 150 может вычесть примерные помехи из фильтрованных символов и затем обработать результирующие символы, чтобы получить обнаруженные символы для другого кадра 2.
Для своевременного SIC приемник 150 может отфильтровать принятые выборки с помощью входного фильтра только один раз, чтобы получить фильтрованные символы для всех L кадров. Приемник 150 может выполнить подавление помех на фильтрованных символах (вместо принятых выборок), что может значительно упростить обработку на приемнике. Для каждого последующего кадра приемник 150 может пересчитывать матрицу Δ c или D c объединителя для каждого каналообразующего кода c на основе фильтрованных символов и восстановленных символов данных для только что декодированного кадра.
Для простоты нижеследующее описание предполагает, что два кадра отправляются одновременно в передаче MIMO. Обсуждение может быть расширено до любого количества кадров. Приемник 150 сначала может восстановить кадр 1, как описано выше. Для кадра 2 символы, доступные для восстановления кадра 2, могут быть выражены в виде:

где  - восстановленный символ данных для декодированного кадра 1 и
- восстановленный символ данных для декодированного кадра 1 и
 - вектор (M+1)×1 символов, доступных для восстановления кадра 2.
- вектор (M+1)×1 символов, доступных для восстановления кадра 2.
Вектор объединителя для кадра 2 может выводиться на основе критерия MMSE следующим образом:

где d c,2 (s) - вектор (M+1)×1 объединителя для кадра 2. Вектор объединителя может рассматриваться как матрица объединителя с одним столбцом.
Если два кадра отправляются одновременно, то A c=[ a c,1 a c,2]. Вектор объединителя для кадра 2 может тогда выводиться следующим образом:

Большинство членов в уравнении (42) могут быть доступны из обработки кадра 1. В частности,  может быть получено, как показано в уравнении (32).
a
c,2 может быть получено из второго столбца в
A
c, которая может выводиться, как показано в уравнении (27).
a
c,1 может быть получено из первого столбца в
A
c. Однако, поскольку доступны восстановленные символы данных для кадра 1, усовершенствованный
a
c,1 может быть получен следующим образом:
может быть получено, как показано в уравнении (32).
a
c,2 может быть получено из второго столбца в
A
c, которая может выводиться, как показано в уравнении (27).
a
c,1 может быть получено из первого столбца в
A
c. Однако, поскольку доступны восстановленные символы данных для кадра 1, усовершенствованный
a
c,1 может быть получен следующим образом:

Обнаруженные символы  для кадра 2 тогда могут быть получены следующим образом:
для кадра 2 тогда могут быть получены следующим образом:

Уравнение (44) объединяет фильтрованные символы и восстановленные символы данных для кадра 1 на основе вектора d c,2(s) объединителя для получения обнаруженных символов для кадра 2. Уравнение (44), по существу, выполняет оценку и подавление помех, а также линейное обнаружение MIMO. Уравнение (44) может быть разложено следующим образом.
Помехи из-за кадра 1 могут оцениваться следующим образом:

где d c,M+1 - скаляр/вес для оценки помех из-за декодированного кадра 1 и
i c,1(s) - своевременные помехи из-за кадра 1.
d c,M+1 - последний элемент вектора d c,2(s) объединителя и выводится на основе фильтрованных символов, а также восстановленных символов данных для кадра 1.
Обнаружение MIMO для кадра 2 может быть выражено в виде:

где  - вектор M×1, содержащий первые M элементов вектора
d
c,2(s) объединителя, и
- вектор M×1, содержащий первые M элементов вектора
d
c,2(s) объединителя, и  - символ, полученный для кадра 2.
- символ, полученный для кадра 2.
Обнаруженные символы  для кадра 2 тогда могут быть получены следующим образом:
для кадра 2 тогда могут быть получены следующим образом:

Для своевременного SIC только своевременные компоненты сигнала подвергаются подавлению помех, а многолучевые характеристики принятых выборок после подавления помех остаются без изменений. Это означает, что один и тот же входной фильтр F или W p может использоваться для каждого кадра и все изменения к оптимальному фильтру W c могут быть включены в матрицу объединителя. Только матрица Δ c или D c объединителя, действующая на своевременном символе, затрагивается подавлением помех. Это имеет место независимо от матрицы B c передачи и порядка, в котором восстанавливаются L кадров. Матрица Δ c или D c объединителя может пересчитываться для каждого каналообразующего кода в каждом кадре и использоваться для объединения фильтрованных символов для этого каналообразующего кода этого кадра.
Для сообщения CQI желательно уметь оценивать SINR, достигаемое каждым позднее восстановленным кадром, используя параметрические способы, которые не привлекают фактическое декодирование и подавление каждого ранее восстановленного кадра. Причина в том, что кадры не отправляются приемнику 150, пока приемник не планируется для передачи данных. Для оценки SINR, SINR каждого кадра может оцениваться путем установки столбца в B c для каждого восстановленного кадра в ноль. Например, если отправляются два кадра, то SINR первого восстановленного кадра 1 может вычисляться с использованием B c=[ b 1 b 2] , например, как показано в уравнениях (36) и (37). SINR второго восстановленного кадра 2 может вычисляться с использованием B c,2=[ 0 b 2], которая является матрицей передачи, которая отражает гипотетическое подавление кадра 1.
Способ оценки SINR, описанный выше, может позволить приемнику 150 легко оценивать выигрыши от подавления помех для разных матриц B c передачи и/или разных порядков восстановления L кадров. Например, приемник 150 может оценить SINR кадра 1, восстановленного первым (используя B c=[ b 1 b 2]), и SINR кадра 2, восстановленного вторым (используя B c,2=[ 0 b 2]), которое отражает подавление помех в кадре 1. Приемник 150 также может оценить SINR кадра 2, восстановленного первым (используя B c=[ b 1 b 2]), и SINR кадра 1, восстановленного вторым (используя B c,1=[ b 1 0 ]), которое отражает подавление помех в кадре 2. Приемник 150 также может оценивать разные матрицы передачи, которые могут использоваться для передачи данных. Приемник 150 может определить конкретную матрицу передачи и конкретный порядок восстановления, которые приводят к наилучшей производительности, например, в показателях общей пропускной способности или скорости передачи данных для всех L кадров. Приемник 150 может отправить эту информацию передатчику 110, чтобы помочь передаче данных к приемнику.
Поскольку входной фильтр является постоянным касательно своевременного SIC, грубая оценка SINR может быть возможной, даже когда приемник 150 не планируется для передачи данных. SINR каждого кадра может оцениваться путем простого пересчета матрицы D c объединителя на основе матрицы передачи для этого кадра. Поскольку затраты вычислительных ресурсов могут быть низкими, может быть удобно оценить разные матрицы передачи и порядки восстановления, чтобы определить матрицу передачи и/или другой порядок восстановления, которые приведут к наилучшей производительности.
Оценка SINR каждого позднее восстановленного кадра на основе своевременного SIC может представить показатель производительности последнего восстановленного кадра только линейно в зависимости от мощности передачи, выделенной каналообразующим кодам, используемым для передачи данных. Это обусловлено теми фактами, что (i) статистические свойства многолучевых помех остаются такими же независимо от каналообразующего кода и распределения мощности, если используется одинаковая полная мощность, и (ii) все вклады своевременных помех обращаются в ноль. Часть (ii) имеет место, потому что (a) помехи из-за каждого восстановленного кадра на тех же каналообразующих кодах подавляются и (b) помехи от других каналообразующих кодов подавляются по причине ортогональности каналообразующих кодов, когда выровнены по времени. Эта линейная зависимость показателя производительности от выделенной мощности передачи может позволить передатчику 110 масштабировать SINR, сообщенные приемником 150, на фактическую мощность передачи, используемую для кадра, если предполагаемая мощность для оценки SINR отличается от мощности, используемой для передачи данных.
Своевременное SIC может обеспечить улучшенную производительность по сравнению с отсутствием подавления помех. Кроме того, своевременное SIC может требовать гораздо меньшего объема вычислений, чем полное SIC. Своевременное SIC также может допускать согласованную оценку SINR, которая может повысить производительность.
Фиг.4 показывает блок-схему приемника 150a, который является одним исполнением приемника 150 на фиг.1. В этом исполнении входная фильтрация выполняется перед демодуляцией CDMA. Эквалайзер/демодулятор 160a CDMA, который является одним исполнением блока 160 на фиг.1, включает в себя входной фильтр/эквалайзер 410 и демодулятор 420 CDMA. Демодулятор 420 CDMA включает в себя C дескремблеров/блоков сужения по спектру 422a - 422C для вплоть до C каналообразующих кодов, используемых для данных трафика. MIMO-процессор 170a приема, который является одним исполнением блока 170 на фиг.1, включает в себя C объединителей 432a - 432C для вплоть до C каналообразующих кодов, используемых для данных трафика.
В канальном процессоре 156a, который является одним исполнением блока 156 на фиг.1, блок 442 оценки синхронизации определяет синхронизацию принятых сигналов. Блок 442 может оценивать импульсные характеристики канала и/или профили задержки мощности для разных антенн и может определять центр тяжести импульсных характеристик канала и/или профилей задержки мощности. Блок 442 может затем определить синхронизацию принятых сигналов на основе центра тяжести.
Блок 444 вычисления коэффициентов выводит коэффициенты для фильтра W p на основе принятых выборок, например, как показано в уравнении (20). Блок 444 также может выводить W p на основе RLS, блочного метода наименьших квадратов или какого-нибудь другого способа. Информация о синхронизации от блока 442 может использоваться для обучения, например, для выравнивания локально сформированных элементарных посылок пилот-сигнала с принятыми выборками. Блок 444 выдает W p входному фильтру 410.
Фильтр 410 выполняет входную фильтрацию/коррекцию на принятых выборках x (k) с помощью W p и выдает фильтрованные выборки. В демодуляторе 420 CDMA каждый блок 422 суживает по спектру и дескремблирует фильтрованные выборки для разного каналообразующего кода и выдает фильтрованные символы z c(s) для этого каналообразующего кода.
Блок 446 суживает по спектру и дескремблирует фильтрованные выборки для каналообразующего кода p пилот-сигнала. Блоки 422 и 446 выполняют сужение по спектру и дескремблирование на основе синхронизации, выданной блоком 442. Блок 448 оценки канала оценивает M×M матрицу  на основе фильтрованных пилот-символов от блока 446. Блок 450 вычисляет векторное произведение
на основе фильтрованных пилот-символов от блока 446. Блок 450 вычисляет векторное произведение  для каждого каналообразующего кода, усредняет векторное произведение по каналообразующим кодам и периодам символов и выдает корреляционную матрицу
R
zz, например, как показано в уравнении (32). Блок 452 выводит коэффициенты для матрицы
D
c объединителя для каждого каналообразующего кода c на основе матрицы от блока 448, корреляционной матрицы
R
zz от блока 450 и специфичных для кода матриц следующим образом:
для каждого каналообразующего кода, усредняет векторное произведение по каналообразующим кодам и периодам символов и выдает корреляционную матрицу
R
zz, например, как показано в уравнении (32). Блок 452 выводит коэффициенты для матрицы
D
c объединителя для каждого каналообразующего кода c на основе матрицы от блока 448, корреляционной матрицы
R
zz от блока 450 и специфичных для кода матриц следующим образом:

В MIMO-процессоре 170a приема каждый объединитель 432 объединяет фильтрованные символы для разного каналообразующего кода c на основе матрицы D c объединителя и выдает обнаруженные символы для этого каналообразующего кода.
В общем, входная фильтрация может выполняться на первом этапе, чтобы обработать несвоевременные компоненты сигнала в M принятых сигналах. Входной фильтр в целом является независимым от того, как обрабатываются сигналы на передатчике перед передачей. Для передачи CDM входной фильтр может быть пригодным для всех каналообразующих кодов. Второй этап может объединять своевременные компоненты сигнала, чтобы восстановить L переданных сигналов. Матрицы объединителя, используемые на втором этапе, могут зависеть от того, как сигналы обрабатываются перед передачей (например, матрица
B
c передачи и матрица
G
c усилений, используемые передатчиком) и других факторов (например, характеристики  канала и статистики
R
zz сигнала).
канала и статистики
R
zz сигнала).
Фиг.5А показывает блок-схему приемника 150b, который выполняет полное SIC и является другим исполнением приемника 150 на фиг.1. В этом исполнении входная фильтрация выполняется перед демодуляцией CDMA. Эквалайзер/демодулятор 160b CDMA, который является другим исполнением блока 160 на фиг.1, включает в себя сумматор 408, входной фильтр/эквалайзер 410, демодулятор 420 CDMA, модулятор 424 CDMA и блок 426 оценки помех. Для первого кадра сумматор 408 просто передает принятые выборки входному фильтру 410. Для каждого последующего кадра блок 426 оценки помех выдает помехи из-за только что восстановленного кадра, и сумматор 408 вычитает помехи из принятых выборок, например, как показано в уравнении (39), и выдает входные выборки входному фильтру 410. Фильтр 410 выполняет входную фильтрацию/коррекцию на принятых выборках или входных выборках с помощью W p и выдает фильтрованные выборки. Демодулятор 420 CDMA суживает по спектру и дескремблирует фильтрованные выборки для всех каналообразующих кодов и выдает фильтрованные символы для этих каналообразующих кодов.
В канальном процессоре 156b, который является другим исполнением блока 156 на фиг.1, блоки 442 - 450 работают, как описано выше для фиг.4. Для каждого кадра блок 450 может вычислить векторное произведение фильтрованных символов из демодулятора 420 CDMA для каждого каналообразующего кода, усреднить векторное произведение по каналообразующим кодам и периодам символов и выдать корреляционную матрицу
R
zz, например, как показано в уравнении (32). Для первого кадра блок 452 может вывести коэффициенты для матрицы
D
c объединителя для каждого каналообразующего кода c, как описано выше для фиг.4. Для каждого последующего кадра блок 452 может вывести коэффициенты для матрицы
D
c объединителя на основе фильтрованных выборок для этого кадра.
В MIMO-процессоре 170 приема, который может быть реализован, как показано на фиг.4, объединитель для каждого каналообразующего кода c может объединить фильтрованные символы для этого каналообразующего кода на основе матрицы D c объединителя и выдать обнаруженные символы для каналообразующего кода. Процессор 172 принимаемых данных может демодулировать и декодировать обнаруженные символы для восстанавливаемого кадра и выдать декодированные данные. Если кадр декодируется правильно, то процессор 174 передаваемых данных может кодировать и модулировать декодированный кадр и выдать восстановленные символы данных для кадра. MIMO-процессор 176 передачи может обработать восстановленные символы данных, чтобы получить выходные символы. Модулятор 424 CDMA может затем расширить и скремблировать выходные символы для получения выходных элементарных посылок для декодированного кадра. Блок 426 оценки помех может оценить помехи из-за декодированного кадра, например, как показано в уравнении (38), и выдать примерные помехи.
Для полного SIC канальный процессор 156b может вывести входной фильтр для каждого кадра и блок 424 оценки помех может оценить помехи для всей продолжительности входного фильтра. Канальный процессор 156b может вывести матрицу объединителя для каждого каналообразующего кода для каждого кадра.
Фиг.5B показывает блок-схему приемника 150c, который выполняет своевременное SIC и является еще одним исполнением приемника 150 на фиг.1. В этом исполнении входная фильтрация выполняется перед демодуляцией CDMA. Эквалайзер/демодулятор 160a CDMA может обработать принятые выборки и выдать фильтрованные символы для каждого каналообразующего кода c, как описано выше для фиг.4. MIMO-процессор 170 приема может объединить фильтрованные символы для каждого каналообразующего кода c на основе матрицы D c или d c,2 объединителя и выдать обнаруженные символы для каналообразующего кода. Процессор 172 принимаемых данных может демодулировать и декодировать обнаруженные символы для восстанавливаемого кадра и выдать декодированные данные. Если кадр декодируется правильно, то процессор 174 передаваемых данных может кодировать и модулировать декодированный кадр и выдать восстановленные символы данных для кадра. Умножитель 460 может масштабировать восстановленные символы данных с помощью скаляра/веса, чтобы получить оценку помех из-за декодированного кадра, например, как показано в уравнении (45). Сумматор 462 может вычесть результат умножителя 460 из результата MIMO-процессора 170 приема для подавления помех, например, как показано в уравнении (47), и может затем выдать обнаруженные символы для следующего кадра, который нужно восстановить. Оценка и подавление помех также может выполняться внутри или до MIMO-процессора 170 приема.
Для своевременного SIC канальный процессор 156b может вывести единый входной фильтр для всех L кадров и умножитель 460 может оценить помехи только для своевременных компонентов сигнала каждого декодированного кадра. Канальный процессор 156b может вывести матрицу объединителя для каждого каналообразующего кода для каждого кадра.
Фиг.5C показывает блок-схему приемника 150d, который выполняет своевременное SIC для передачи MIMO у двух кадров и является еще одним исполнением приемника 150 на фиг.1. Входная фильтрация и демодуляция CDMA могут выполняться на принятых выборках для получения фильтрованных символов для каждого каналообразующего кода (блок 510). Блок 510 может включать в себя блоки 410, 420 и 446 на фиг.5B. Блоки, используемые для выведения входного фильтра (например, блоки 442 и 444 на фиг.5B), не показаны на фиг.5C для ясности. Характеристика  канала и ковариационная матрица
R
zz могут оцениваться на основе фильтрованных символов (блок 518). Блок 518 может включать в себя блоки 448 и 450 на фиг.5B. Матрица
D
c объединителя для первого кадра может вычисляться на основе характеристики канала, ковариационной матрицы и других параметров, например, как показано в уравнении (48) (блок 524). Фильтрованные символы могут объединяться на основе матрицы
D
c объединителя для получения обнаруженных символов для первого кадра, например, как показано в уравнении (29) (блок 520). Обнаруженные символы для первого кадра могут демодулироваться и декодироваться для получения декодированных данных для первого кадра (блок 522).
канала и ковариационная матрица
R
zz могут оцениваться на основе фильтрованных символов (блок 518). Блок 518 может включать в себя блоки 448 и 450 на фиг.5B. Матрица
D
c объединителя для первого кадра может вычисляться на основе характеристики канала, ковариационной матрицы и других параметров, например, как показано в уравнении (48) (блок 524). Фильтрованные символы могут объединяться на основе матрицы
D
c объединителя для получения обнаруженных символов для первого кадра, например, как показано в уравнении (29) (блок 520). Обнаруженные символы для первого кадра могут демодулироваться и декодироваться для получения декодированных данных для первого кадра (блок 522).
Если первый кадр декодируется правильно, что может быть определено на основе проверки CRC, то декодированный первый кадр может кодироваться и модулироваться для получения восстановленных символов данных для первого кадра (блок 526). Матрица d c,2 объединителя для второго кадра может вычисляться на основе ковариационной матрицы, восстановленных символов данных для первого кадра и других параметров, например, как показано в уравнении (42) (блок 534). Блок 534 может вывести улучшенную оценку a c,1 на основе восстановленных символов данных для первого кадра, как показано в уравнении (43). Фильтрованные символы и восстановленные символы данных для первого кадра могут объединяться на основе матрицы d c,2 объединителя для получения обнаруженных символов для второго кадра, например, как показано в уравнении (44) (блок 530). Обнаруженные символы для второго кадра могут демодулироваться и декодироваться для получения декодированных данных для второго кадра (блок 532). Показанная на фиг.5C обработка может быть расширена для любого количества кадров.
Фиг.6 показывает исполнение процесса 600 для восстановления передачи MIMO без SIC. Входной фильтр выводится для обработки (например, компенсации, подавления или смягчения) несвоевременных компонентов сигнала в нескольких принятых сигналах (этап 612). Входной фильтр не изолирует несвоевременные компоненты сигнала. Вместо этого входной фильтр обрабатывает несвоевременные компоненты сигнала желаемым/выгодным способом и также может (попутно) обработать своевременные компоненты сигнала. Также выводится по меньшей мере одна матрица объединителя для объединения своевременных компонентов сигнала для нескольких переданных сигналов (этап 614). Входной фильтр может быть F , выведенным как показано в уравнении (21), и матрицы объединителя могут быть Δ c, выведенной как показано в уравнении (23). Входной фильтр также может быть W p, выведенным как показано в уравнении (19 или 20), и матрицы объединителя могут быть D c, выведенной, например, как показано в уравнении (30), (33) или (48). Входной фильтр и матрицы объединителя также могут выводиться другими способами. Входной фильтр может выводиться на основе принятых данных для пилот-сигнала и в соответствии, например, с критерием наименьших квадратов. Матрицы объединителя могут выводиться на основе матриц передачи, используемых для отправки данных, коэффициентов усиления, используемых для данных, оценки характеристики канала, входного фильтра, статистики сигнала и/или шума и т.д. Матрицы объединителя также могут выводиться в соответствии с MMSE или каким-нибудь другим критерием.
Принятые данные фильтруются для обработки несвоевременных компонентов сигнала в нескольких принятых сигналах (этап 616). Фильтрованные данные обрабатываются для объединения своевременных компонентов сигнала для нескольких переданных сигналов (этап 618). Принятые данные для более чем одного периода символа могут фильтроваться для обработки несвоевременных компонентов сигнала. Фильтрованные данные для одного периода символа могут обрабатываться для объединения своевременных компонентов сигнала. Принятые данные и фильтрованные данные могут быть заданы в выборках, символах и т.д.
Для передачи CDM, отправленной с помощью нескольких каналообразующих кодов, единый входной фильтр может выводиться и использоваться для обработки несвоевременных компонентов сигнала и несколько матриц объединителя могут выводиться и использоваться для объединения своевременных компонентов сигнала для нескольких каналообразующих кодов. В одной схеме принятые данные сначала фильтруются с помощью входного фильтра, чтобы получить промежуточные данные. Промежуточные данные затем суживаются по спектру для каждого каналообразующего кода, чтобы получить фильтрованные данные для каналообразующего кода. Фильтрованные данные для каждого каналообразующего кода дополнительно обрабатываются с помощью матрицы объединителя для этого каналообразующего кода, чтобы получить выходные данные для каналообразующего кода. В другой схеме принятые данные сначала суживаются по спектру для каждого каналообразующего кода, чтобы получить суженные по спектру данные для каналообразующего кода. Суженные по спектру данные для каждого каналообразующего кода затем фильтруются с помощью того же входного фильтра, чтобы получить фильтрованные данные для каналообразующего кода. Фильтрованные данные для каждого каналообразующего кода дополнительно обрабатываются с помощью матрицы объединителя для каналообразующего кода, чтобы получить выходные данные для каналообразующего кода.
Для CDM входной фильтр может выводиться на основе принятых данных и известного пилот-сигнала, например, на основе (a) выборок для принятых данных и известных элементарных посылок пилот-сигнала для обучения на уровне элементарной посылки или (b) суженных по спектру пилот-символов, полученных из принятых данных, и известных пилот-символов для обучения на уровне символа. Матрицы объединителя могут выводиться на основе матриц передачи, используемых для нескольких каналообразующих кодов, коэффициентов усиления для нескольких каналообразующих кодов, оценки характеристики канала, входного фильтра, статистики сигнала и/или шума и т.д., или их сочетания. Входной фильтр и оценка характеристики канала могут оцениваться совместно, например, в виде  .
.
Фиг.7 показывает исполнение процесса 700 для восстановления передачи MIMO со своевременным SIC. Могут быть получены принятые данные для передачи MIMO (этап 712). Принятые данные могут быть обработаны на основе входного фильтра, чтобы получить фильтрованные данные (этап 714). Фильтрованные данные могут быть дополнительно обработаны на основе по меньшей мере одной первой матрицы объединителя, чтобы получить обнаруженные данные для первого кадра (этап 716). Обнаруженные данные для первого кадра могут быть обработаны (например, демодулированы и декодированы) для получения декодированных данных для первого кадра (этап 718). Фильтрованные данные также могут быть обработаны на основе по меньшей мере одной второй матрицы объединителя и декодированных данных для первого кадра, чтобы подавить помехи из-за первого кадра и получить обнаруженные данные для второго кадра (этап 720). Для этапа 720 помехи из-за первого кадра могут оцениваться и подавляться (например, на уровне символа вместо уровня выборки) в фильтрованных данных, только если первый кадр правильно декодируется. Обнаруженные данные для второго кадра могут быть обработаны для получения декодированных данных для второго кадра (этап 722).
Входной фильтр может обрабатывать несвоевременные компоненты сигнала в принятых данных, чтобы получить фильтрованные данные. Каждая матрица объединителя может объединять своевременные компоненты сигнала в фильтрованных данных для соответствующего каналообразующего кода, чтобы получить обнаруженные данные для каналообразующего кода. Входной фильтр может выводиться на основе принятых данных и известных данных пилот-сигнала. Первый и второй кадры могут отправляться с использованием по меньшей мере одного каналообразующего кода. Первая матрица объединителя может выводиться для каждого каналообразующего кода на основе фильтрованных данных, матрицы передачи для каналообразующего кода, коэффициента усиления для каналообразующего кода, входного фильтра, оценки характеристики канала и т.д. или любого их сочетания. Вторая матрица объединителя может выводиться для каждого каналообразующего кода на основе фильтрованных данных, декодированных данных для первого кадра, матрицы передачи для каналообразующего кода и т.д. или любого их сочетания.
Для своевременного SIC помехи из-за своевременных компонентов сигнала в первом кадре могут оцениваться и подавляться в фильтрованных данных. Один и тот же входной фильтр может использоваться для обработки принятых данных для всех кадров. Для полного SIC помехи из-за первого кадра для всей или большей части продолжительности входного фильтра могут оцениваться и подавляться в принятых данных, чтобы получить входные данные. Входной фильтр может обновляться для второго кадра и использоваться для обработки входных данных.
Качество принятого сигнала (например, SINR) у первого кадра может оцениваться на основе (i) матрицы передачи для первого и второго кадров и (ii) предположения об отсутствии подавления помех в каком бы то ни было кадре. Качество принятого сигнала у второго кадра может оцениваться на основе (i) измененной матрицы передачи, имеющей столбец, соответствующий первому кадру, установленный в ноль, и (ii) предположения о подавлении помех из-за своевременных компонентов сигнала в первом кадре. Качества принятого сигнала у первого и второго кадров могут оцениваться дополнительно на основе входного фильтра, по меньшей мере одной первой матрицы объединителя, по меньшей мере одной второй матрицы объединителя, по меньшей мере одного коэффициента усиления для по меньшей мере одного каналообразующего кода, используемого для первого и второго кадров, оценки характеристики канала или любого их сочетания.
Перед передачей MIMO качества принятого сигнала у нескольких кадров могут оцениваться по меньшей мере для одной матрицы передачи и по меньшей мере одного порядка восстановления для нескольких кадров, например на основе предположения, что своевременные компоненты сигнала у каждого ранее восстановленного кадра будут подавляться. Может выбираться матрица передачи и/или порядок восстановления с наибольшей производительностью. Информация обратной связи, содержащая выбранную матрицу передачи и/или выбранный порядок восстановления, может отправляться передатчику. Передатчик может использовать информацию обратной связи для отправки передачи MIMO к приемнику.
Многоэтапный приемник, описываемый в настоящем документе, также может использоваться для других систем связи. Например, в системе с мультиплексированием с временным разделением (TDM) входной фильтр может выводиться на основе пилот-сигнала, принятого в первом интервале времени, и матрица объединителя для второго интервала времени может выводиться на основе матрицы передачи, используемой во втором интервале времени. Данные, принятые во втором интервале времени, могут фильтроваться с помощью входного фильтра, и фильтрованные данные могут дополнительно обрабатываться с помощью матрицы объединителя.
В общем, фильтр может выводиться на основе пилот-сигнала, который может отправляться в конкретном каналообразующем коде и/или интервале времени, и с использованием конкретной матрицы передачи и коэффициента усиления. Фильтр, выведенный из пилот-сигнала, может использоваться для выведения фильтра для данных, которые могут отправляться в других каналообразующих кодах и/или интервалах времени, и по возможности с использованием разных матриц передачи и коэффициентов усиления.
Для CDMA своевременные и несвоевременные компоненты сигнала могут отличаться по времени, в которое они передаются. Приемник может обрабатывать окно выборок, чтобы восстановить нужный символ, переданный передатчиком. Синхронизация эквалайзера определяет момент времени, в который передается нужный символ, относительно окна. Выборки, полученные приемником, содержат разные добавочные компоненты сигнала, включая своевременные и несвоевременные компоненты сигнала. Своевременные компоненты сигнала являются компонентами сигнала для нужного символа, а также других символов, переданных одновременно с нужным символом. Все остальные компоненты сигнала являются несвоевременными компонентами сигнала, которые включают в себя компоненты сигнала, относящиеся к символам, переданным до и после нужного символа.
Символ может передаваться с помощью функции передачи, которая может зависеть от одного или нескольких параметров. Например, функция передачи может зависеть от периода s символа, каналообразующего кода c, частотного интервала или индекса n поднесущей и т.д. и может обозначаться в виде f(s,c,n,…). Для простоты функция передачи может зависеть от трех параметров s, c и n или кортежа (s,c,n). Функции передачи для разных символов могут быть ортогональными, чтобы 〈f(s 1,c 1,n 1),f(s 2,c 2,n 2)〉 ≠ 0, только если s 1=s 2, c 1=c 2 и n 1=n 2, что может быть выражено в виде (s 1,c 1,n 1)=(s 2,c 2,n 2).
Принятый сигнал может включать в себя: (a) нужные компоненты сигнала от нужной функции f(s 1,c 1,n 1), передачи, заданные кортежем (s 1,c 1,n 1), и (b) другие компоненты сигнала от других функций f(s,c,n) передачи, причем (s,c,n)≠(s 1,c 1,n 1). Входная фильтрация на первом этапе может обработать другие компоненты сигнала. Объединитель на втором этапе может обработать нужные компоненты сигнала.
Для CDM функции передачи для периода s символа определяются каналообразующими кодами с длиной C, умноженными на последовательность p(k) скремблирования. Функция передачи для периода s символа и каналообразующего кода c может обозначаться как f(s,c). С позиции символа, переданного с помощью функции f(s 1,c 1) передачи, принятый сигнал содержит следующее:
1. несвоевременные компоненты сигнала, соответствующие f(s,c) для s≠s 1,
2. своевременные компоненты сигнала, соответствующие f(s 1,c) и состоящие из:
a. своевременных компонентов сигнала из нужного каналообразующего кода и соответствующих f(s 1,c 1), и
b. своевременных компонентов сигнала из других каналообразующих кодов и соответствующих f(s 1,c 2) для c≠c 1.
Входной фильтр обрабатывает несвоевременные компоненты сигнала, соответствующие f(s,c). Дескремблирование и сужение по спектру с помощью входного фильтра также подавляет своевременные компоненты сигнала из других каналообразующих кодов и соответствующие f(s 1,c 2). Объединитель обрабатывает своевременные компоненты сигнала из нужного каналообразующего кода и соответствующие f(s 1,c 1).
В системе с одной несущей, которая не использует CDM, функции передачи могут быть просто цифровыми дельта-функциями во времени и могут задаваться в виде f(s)=δ(t-s). Поскольку время t движется вперед, положение дельты изменяется во времени.
В системе на основе OFDM функции передачи могут иметь место для разных поднесущих и могут задаваться в виде f(s,n), где n - индекс поднесущей. Поднесущие в OFDM могут соответствовать каналообразующим кодам в CDM. Передатчик может отправлять N символов данных/пилот-символов на N поднесущих в периоде символа OFDM из заданной передающей антенны путем (a) преобразования N символов данных/пилот-символов во временную область с помощью обратного быстрого преобразования Фурье (IFFT), чтобы получить N выборок временной области, и (b) добавления циклического префикса к выборкам временной области, чтобы получить символ OFDM. Приемник может получить принятые символы данных/пилот-символы для заданной приемной антенны путем (a) удаления циклического префикса в принятых выборках и (b) преобразования N принятых выборок в частотную область с помощью быстрого преобразования Фурье (FFT), чтобы получить N принятых символов для N поднесущих. Принятые символы могут соответствовать z c(s) в уравнении (40), где нижний индекс c заменяется индексом n поднесущей. Для OFDM своевременные компоненты сигнала могут быть компонентами сигнала, отправленными на конкретной поднесущей из разных передающих антенн. Несвоевременные компоненты сигнала могут быть компонентами сигнала, отправленными на других поднесущих. Входной фильтр может быть реализован с помощью FFT и удаления циклического префикса на приемнике. Матрица D c объединителя может вычисляться для каждой поднесущей и использоваться для объединения принятых символов от всех принятых антенн для этой поднесущей.
Специалисты в данной области техники могут понять, что информация и сигналы могут быть представлены с использованием любой из ряда различных технологий и способов. Например, данные, инструкции, команды, информация, сигналы, разряды, символы и элементарные посылки, на которые могут ссылаться по всему вышеприведенному описанию, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами или любым их сочетанием.
Специалисты дополнительно могут признать, что различные пояснительные логические блоки, модули, схемы и этапы алгоритмов, описанные в связи с раскрытием изобретения в настоящем документе, могут быть реализованы в виде электронных аппаратных средств, компьютерного программного обеспечения или их сочетаний. Чтобы ясно проиллюстрировать эту взаимозаменяемость аппаратных средств и программного обеспечения, различные пояснительные компоненты, блоки, модули, схемы и этапы описаны выше, как правило, в терминах их функциональных возможностей. Реализованы ли такие функциональные возможности как аппаратные средства или как программное обеспечение, зависит от конкретного применения и конструктивных ограничений, налагаемых на всю систему. Квалифицированные специалисты могут реализовать описанные функциональные возможности различными путями для каждого отдельного применения, но такие решения по реализации не должны интерпретироваться как вызывающие отклонение от объема настоящего раскрытия изобретения.
Различные пояснительные логические блоки, модули и схемы, описанные применительно к раскрытию изобретения в настоящем документе, могут быть реализованы или выполнены с помощью универсального процессора, цифрового процессора сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства, дискретной вентильной или транзисторной логики, дискретных аппаратных компонентов или любого их сочетания, спроектированных для выполнения описанных в настоящем документе функций. Универсальный процессор может быть микропроцессором, но в альтернативном варианте процессор может быть любым типовым процессором, контроллером, микроконтроллером или конечным автоматом. Процессор также может быть реализован в виде сочетания вычислительных устройств, например сочетания DSP и микропроцессора, множества микропроцессоров, одного или нескольких микропроцессоров совместно с ядром DSP, или любой другой подобной конфигурации.
Этапы способа или алгоритма, описанные в связи с раскрытием изобретения в настоящем документе, могут быть реализованы непосредственно в аппаратных средствах, в программном блоке, выполняемом процессором, или в сочетании двух этих средств. Программный блок может находиться в памяти RAM, флэш-памяти, памяти ROM, памяти EPROM, памяти EEPROM, регистрах, на жестком диске, съемном диске, компакт-диске или любом другом виде носителя информации, известного в данной области техники. Типовой носитель информации соединяется с процессором таким образом, что процессор может считывать информацию и записывать информацию на носитель информации. В альтернативном варианте носитель информации может составлять единое целое с процессором. Процессор и носитель информации могут постоянно находиться в ASIC. ASIC может постоянно находиться в пользовательском терминале. В альтернативном варианте процессор и носитель информации могут постоянно находиться в виде дискретных компонентов в пользовательском терминале.
Предшествующее описание раскрытия изобретения предоставляется, чтобы дать возможность любому специалисту в данной области техники создать или использовать раскрытие изобретения. Различные модификации к этому раскрытию изобретения будут полностью очевидны специалистам в данной области техники, а общие принципы, определенные в этом документе, могут быть применены к другим вариациям без отклонения от сущности или объема раскрытия изобретения. Таким образом, данное раскрытие изобретение не предназначено, чтобы ограничиваться описанными в настоящем документе примерами, а должно соответствовать самому широкому объему, согласующемуся с принципами и новыми признаками, раскрытыми в настоящем документе.

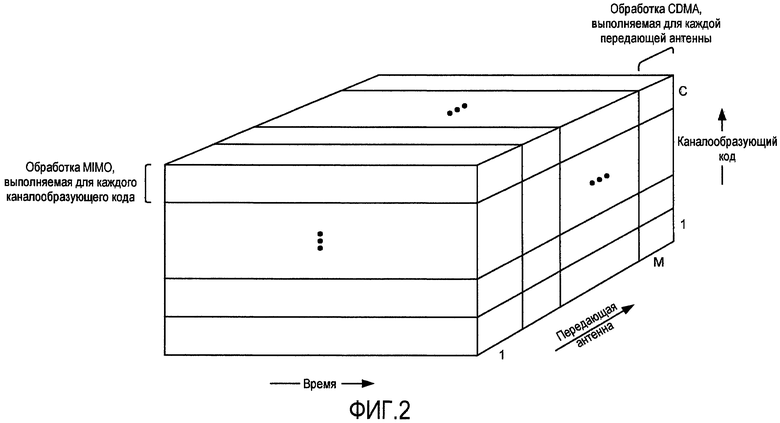
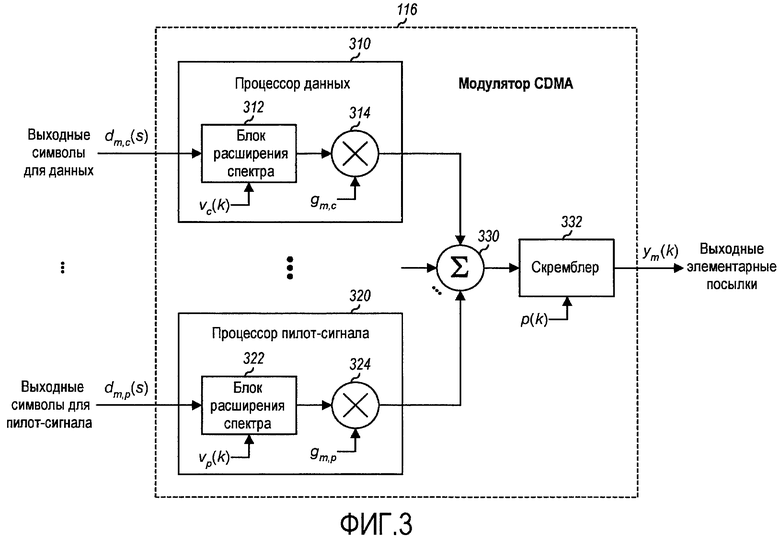


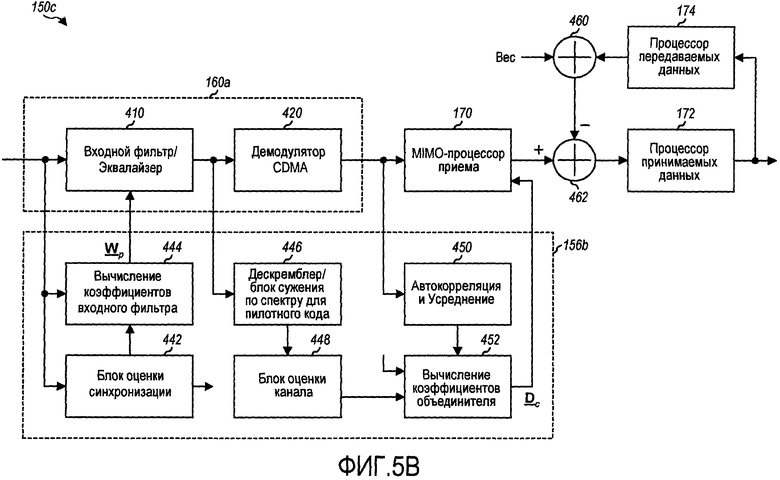


Изобретение относится к связи, а более конкретно, к способам приема передачи в системе со многими входами и многими выходами (MIMO). Технический результат заключается в эффективном приеме передач MIMO. Для этого обрабатывают принятые данные на основе входного фильтра, чтобы получить фильтрованные данные. Затем обрабатывают фильтрованные данные на основе по меньшей мере одной первой матрицы объединителя, чтобы получить обнаруженные данные для первого кадра, и обрабатывают фильтрованные данные на основе по меньшей мере одной второй матрицы объединителя и декодированных данных для первого кадра, чтобы подавить помехи из-за первого кадра и получить обнаруженные данные для второго кадра. 4 н. и 21 з.п. ф-лы, 9 ил., 1 табл.
1. Устройство связи, содержащее:
по меньшей мере один процессор для получения принятых данных для передачи в системе со многими входами и выходами (MIMO), для обработки принятых данных на основе входного фильтра, чтобы получить фильтрованные данные, для обработки фильтрованных данных на основе по меньшей мере одной первой матрицы объединителя, чтобы получить обнаруженные данные для первого кадра, и для обработки фильтрованных данных на основе по меньшей мере одной второй матрицы объединителя и декодированных данных для первого кадра, чтобы подавить помехи из-за первого кадра и получить обнаруженные данные для второго кадра; и
запоминающее устройство, соединенное по меньшей мере с одним процессором.
2. Устройство по п.1, в котором входной фильтр обрабатывает несвоевременные компоненты сигнала в принятых данных, чтобы получить фильтрованные данные, и в котором каждая матрица объединителя объединяет своевременные компоненты сигнала в фильтрованных данных для соответствующего каналообразующего кода, чтобы получить обнаруженные данные для каналообразующего кода.
3. Устройство по п.1, в котором по меньшей мере один процессор обрабатывает обнаруженные данные для первого кадра, чтобы получить декодированные данные для первого кадра, определяет, правильно ли декодируется первый кадр, и оценивает и подавляет помехи из-за первого кадра, если тот декодирован правильно.
4. Устройство по п.1, в котором по меньшей мере один процессор выводит входной фильтр на основе принятых данных и данных пилот-сигнала.
5. Устройство по п.1, в котором первый и второй кадры отправляются с помощью по меньшей мере одного каналообразующего кода, и в котором по меньшей мере один процессор выводит первую матрицу объединителя для каждого каналообразующего кода на основе фильтрованных данных.
6. Устройство по п.5, в котором по меньшей мере один процессор выводит первую матрицу объединителя для каждого каналообразующего кода дополнительно на основе по меньшей мере одного из матрицы передачи, используемой для каналообразующего кода, коэффициента усиления для каналообразующего кода, входного фильтра и оценки характеристики канала.
7. Устройство по п.5, в котором по меньшей мере один процессор выводит вторую матрицу объединителя для каждого каналообразующего кода на основе фильтрованных данных.
8. Устройство по п.7, в котором по меньшей мере один процессор выводит вторую матрицу объединителя для каждого каналообразующего кода дополнительно на основе декодированных данных для первого кадра.
9. Устройство по п.7, в котором по меньшей мере один процессор выводит вторую матрицу объединителя для каждого каналообразующего кода дополнительно на основе по меньшей мере одного из матрицы передачи, используемой для каналообразующего кода, коэффициента усиления для каналообразующего кода, входного фильтра и оценки характеристики канала.
10. Устройство по п.1, в котором по меньшей мере один процессор оценивает помехи из-за своевременных компонентов сигнала в первом кадре, и
подавляет помехи в фильтрованных данных.
11. Устройство по п.1, в котором по меньшей мере один процессор определяет по меньшей мере один вес для оценки помех из-за первого кадра на основе фильтрованных данных и декодированных данных для первого кадра.
12. Устройство по п.1, в котором по меньшей мере один процессор оценивает помехи из-за первого кадра для продолжительности входного фильтра, подавляет помехи в принятых данных, чтобы получить входные данные, обновляет входной фильтр для второго кадра и обрабатывает входные данные на основе обновленного входного фильтра, чтобы получить фильтрованные данные для второго кадра.
13. Устройство по п.1, в котором по меньшей мере один процессор оценивает качество принятого сигнала у первого кадра на основе отсутствия подавления помех в любом кадре и оценивает качество принятого сигнала у второго кадра на основе подавления помех из-за своевременных компонентов сигнала в первом кадре.
14. Устройство по п.1, в котором по меньшей мере один процессор оценивает качество принятого сигнала у первого кадра на основе матрицы передачи для первого и второго кадров и оценивает качество принятого сигнала у второго кадра на основе измененной матрицы передачи, имеющей столбец, соответствующий первому кадру, установленный в ноль.
15. Устройство по п.14, в котором по меньшей мере один процессор оценивает качество принятого сигнала у первого и второго кадров дополнительно на основе по меньшей мере одного из входного фильтра, по меньшей мере одной первой матрицы объединителя, по меньшей мере одной второй матрицы объединителя, по меньшей мере одного коэффициента усиления для по меньшей мере одного каналообразующего кода, используемого для первого и второго кадров, и оценки характеристики канала.
16. Устройство по п.1, в котором по меньшей мере один процессор оценивает качества принятого сигнала у нескольких кадров по меньшей мере для одной матрицы передачи и по меньшей мере одного порядка восстановления для нескольких кадров, выбирает матрицу передачи и порядок восстановления с наибольшей производительностью и отправляет информацию обратной связи, содержащую выбранную матрицу передачи и выбранный порядок восстановления.
17. Способ связи, содержащий этапы, на которых:
получают принятые данные для передачи в системе со многими входами и выходами (MIMO);
обрабатывают принятые данные на основе входного фильтра, чтобы получить фильтрованные данные;
обрабатывают фильтрованные данные на основе по меньшей мере одной первой матрицы объединителя, чтобы получить обнаруженные данные для первого кадра; и
обрабатывают фильтрованные данные на основе по меньшей мере одной второй матрицы объединителя и декодированных данных для первого кадра, чтобы подавить помехи из-за первого кадра и получить обнаруженные данные для второго кадра.
18. Способ по п.17, дополнительно содержащий этапы, на которых:
выводят первую матрицу объединителя для каждого из, по меньшей мере, одного каналообразующего кода, используемого для первого и второго кадров, на основе фильтрованных данных; и
выводят вторую матрицу объединителя для каждого каналообразующего кода на основе фильтрованных данных и декодированных данных для первого кадра.
19. Способ по п.17, в котором этап, на котором обрабатывают фильтрованные данные на основе по меньшей мере одной второй матрицы объединителя, содержит этапы, на которых:
оценивают помехи из-за своевременных компонентов сигнала в первом кадре, и
подавляют помехи в фильтрованных данных.
20. Способ по п.17, дополнительно содержащий этапы, на которых:
оценивают качество принятого сигнала у первого кадра на основе отсутствия подавления помех в любом кадре; и
оценивают качество принятого сигнала у второго кадра на основе подавления помех из-за своевременных компонентов сигнала в первом кадре.
21. Устройство связи, содержащее:
средство получения принятых данных для передачи в системе со многими входами и выходами (MIMO);
средство обработки принятых данных на основе входного фильтра, чтобы получить фильтрованные данные;
средство обработки фильтрованных данных на основе по меньшей мере одной первой матрицы объединителя, чтобы получить обнаруженные данные для первого кадра; и
средство обработки фильтрованных данных на основе по меньшей мере одной второй матрицы объединителя и декодированных данных для первого кадра, чтобы подавить помехи из-за первого кадра и получить обнаруженные данные для второго кадра.
22. Устройство по п.21, дополнительно содержащее:
средство вывода первой матрицы объединителя для каждого из, по меньшей мере, одного каналообразующего кода, используемого для первого и второго кадров, на основе фильтрованных данных; и
средство вывода второй матрицы объединителя для каждого каналообразующего кода на основе фильтрованных данных и декодированных данных для первого кадра.
23. Устройство по п.21, в котором средство обработки фильтрованных данных на основе по меньшей мере одной второй матрицы объединителя содержит
средство оценки помех из-за своевременных компонентов сигнала в первом кадре, и
средство подавления помех в фильтрованных данных.
24. Устройство по п.21, дополнительно содержащее:
средство оценки качества принятого сигнала у первого кадра на основе отсутствия подавления помех в любом кадре; и
средство оценки качества принятого сигнала у второго кадра на основе подавления помех из-за своевременных компонентов сигнала в первом кадре.
25. Машиночитаемый носитель, содержащий:
код, побуждающий компьютер получить принятые данные для передачи в системе со многими входами и выходами (MIMO);
код, побуждающий компьютер обработать принятые данные на основе
входного фильтра, чтобы получить фильтрованные данные;
код, побуждающий компьютер обработать фильтрованные данные на основе по меньшей мере одной первой матрицы объединителя, чтобы получить обнаруженные данные для первого кадра; и
код, побуждающий компьютер обработать фильтрованные данные на основе по меньшей мере одной второй матрицы объединителя и декодированных данных для первого кадра, чтобы подавить помехи из-за первого кадра и получить обнаруженные данные для второго кадра.
| US 2002018454 А1, 14.02.2002 | |||
| RU 2003135853 A, 20.04.2005 | |||
| УСТРОЙСТВО МОБИЛЬНОЙ СВЯЗИ С МНОЖЕСТВОМ ПЕРЕДАЮЩИХ И ПРИЕМНЫХ АНТЕНН И СООТВЕТСТВУЮЩИЙ СПОСОБ МОБИЛЬНОЙ СВЯЗИ | 2003 |
|
RU2238611C1 |
| Сани, например, для навоза и торфа | 1953 |
|
SU101595A1 |
| WO 2005099155 А1, 20.10.2005. | |||

