Настоящая патентная заявка испрашивает приоритет предварительной заявки № 60/741159 "Структура Двухкомпонентного Приемника для Нисходящих Линий Связи MIMO CDMA", поданной 30-го ноября 2005 г., права на которую переуступлены настоящему заявителю и которая включена в данный документ посредством ссылки.
Область техники
Настоящее изобретение относится к связи, в частности к способу для приема и передачи со множеством входов и множеством выходов (MIMO).
Уровень техники
MIMO-передача представляет собой передачу из множества (M) передающих антенн к множеству (N) приемных антенн. Например, передатчик может одновременно передавать M потоков данных из M передающих антенн. Эти потоки данных искажаются беспроводной средой и, сверх того, ухудшаются из-за шума и помех. Приемник принимает передаваемые потоки данных посредством N приемных антенн. Принятый сигнал от каждой приемной антенны содержит масштабированные и задержанные версии переданных потоков данных. Переданные потоки данных, таким образом, распределяются среди N принятых сигналов из N приемных антенн. Приемник может обработать N принятых сигналов посредством пространственно-временного эквалайзера, чтобы восстановить переданные потоки данных.
Приемник может динамическим образом вычислять коэффициенты для пространственно-временного эквалайзера, чтобы учитывать вариации свойств сигнала. Эти свойства сигнала могут относиться к статистике канала и помех, пространственно-временной обработке переданных потоков данных и т.п. Вычисление коэффициентов эквалайзера требует большого объема вычислений. Обновление этих коэффициентов эквалайзера в целях обеспечения соответствия быстрым изменениям свойств сигнала может привести к усложнению структуры приемника. Обновление этих коэффициентов эквалайзера на меньшей скорости может привести к ухудшению рабочих характеристик.
Соответственно существует необходимость в новых способах для эффективного приема MIMO-передачи.
Сущность изобретения
В настоящем документе описаны способы для эффективного приема MIMO-передачи. Приемник принимает множество сигналов, переданных передатчиком, и обрабатывает множество принятых сигналов, чтобы получить принятые данные. Приемник может обрабатывать принятые данные во множестве каскадов. Первый каскад может выполнять фильтрацию/коррекцию принятых данных посредством входного фильтра, чтобы обработать (например, скомпенсировать, подавить или уменьшить) несвоевременные компоненты сигнала. Второй каскад может обрабатывать отфильтрованные данные из первого каскада посредством одной или более комбинационных матриц, чтобы комбинировать своевременные компоненты сигнала. Своевременные и несвоевременные компоненты сигнала можно различить на основании времени передачи. В приемнике своевременные компоненты сигнала могут содержать компоненты сигнала, обратно прослеживающие желаемый символ, который требуется восстановить, а также другие символы, переданные в то же время, что и желаемый символ. Несвоевременные компоненты сигнала могут содержать компоненты сигнала, которые не являются своевременными компонентами сигнала, такими как компоненты сигнала, которые обратно прослеживают другие символы, переданные до и после желаемого символа.
Входной фильтр не зависит от выполняемой в передатчике обработки, свойственной данным, тогда как комбинирующие матрицы могут представлять собой функции от выполняемой в передатчике обработки, которая свойственна данным. Свойственная данным обработка может соответствовать, например, кодам разделения на каналы, матрицам передачи, коэффициентам усиления и т.п., которые используются для передачи данных. Например, в MIMO-передаче, в которой используется мультиплексирование с кодовым разделением (CDM), один входной фильтр может быть выведен и использован для всех кодов разделения на каналы, а для каждого кода разделения на каналы может быть получена отдельная комбинирующая матрица. Разделение выполняемой приемником обработки на множество каскадов упрощает выведение входного фильтра и комбинирующих матриц при обеспечении хороших рабочих характеристик. Входной фильтр и комбинирующие матрицы могут обновляться по отдельности с одинаковой или различной частотой.
Согласно одному аспекту настоящего изобретения описано устройство, которое включает в себя, по меньшей мере, один процессор и память. Процессор(ы) фильтрует(ют) принятые данные, чтобы обработать несвоевременные компоненты сигнала во множестве принятых сигналов и чтобы получить отфильтрованные данные. Процессор(ы) также обрабатывает(ют) отфильтрованные данные, чтобы комбинировать своевременные компоненты сигнала для множества переданных сигналов.
Согласно еще одному аспекту настоящего изобретения описано устройство, которое включает в себя, по меньшей мере, один процессор и память. Процессор(ы) выводит(ят) входной фильтр для обработки несвоевременных компонентов сигнала во множестве принятых сигналов, а также множество комбинирующих матриц для комбинирования своевременных компонентов сигнала для множества сигналов, переданных посредством множества кодов разделения на каналы. Процессор(ы) отфильтровывает(ют) принятые выборки посредством входного фильтра и получает(ют) отфильтрованные символы для множества кодов разделения на каналы. Процессор(ы) также обрабатывает(ют) отфильтрованные символы для каждого кода разделения на каналы посредством комбинирующей матрицы для кода разделения на каналы, чтобы получить выходные символы для кода разделения на каналы.
Различные аспекты и отличительные признаки раскрытия более подробно описаны ниже.
Краткое описание чертежей
Фиг. 1 - структурная схема передатчика и приемника;
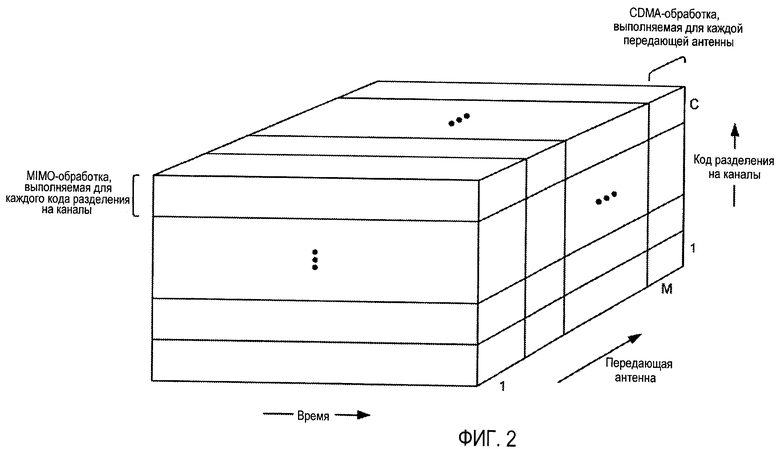
Фиг. 2 - иллюстрация передачи MIMO-CDM;
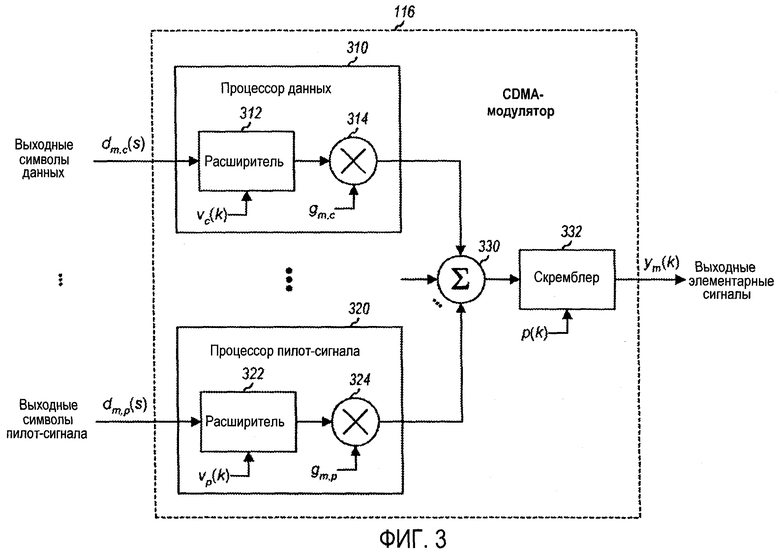
Фиг. 3 - структурная схема CDMA-модулятора;
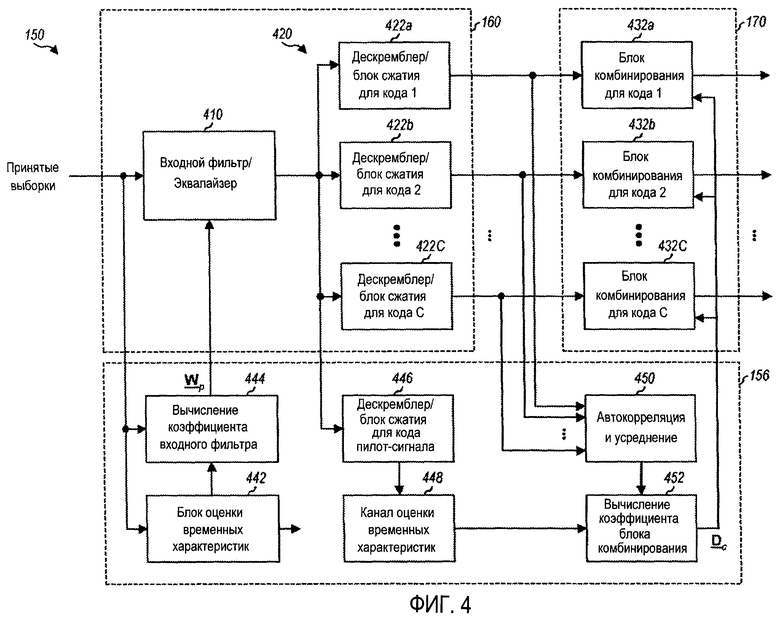
Фиг. 4 - иллюстрация структуры различных блоков в приемнике;
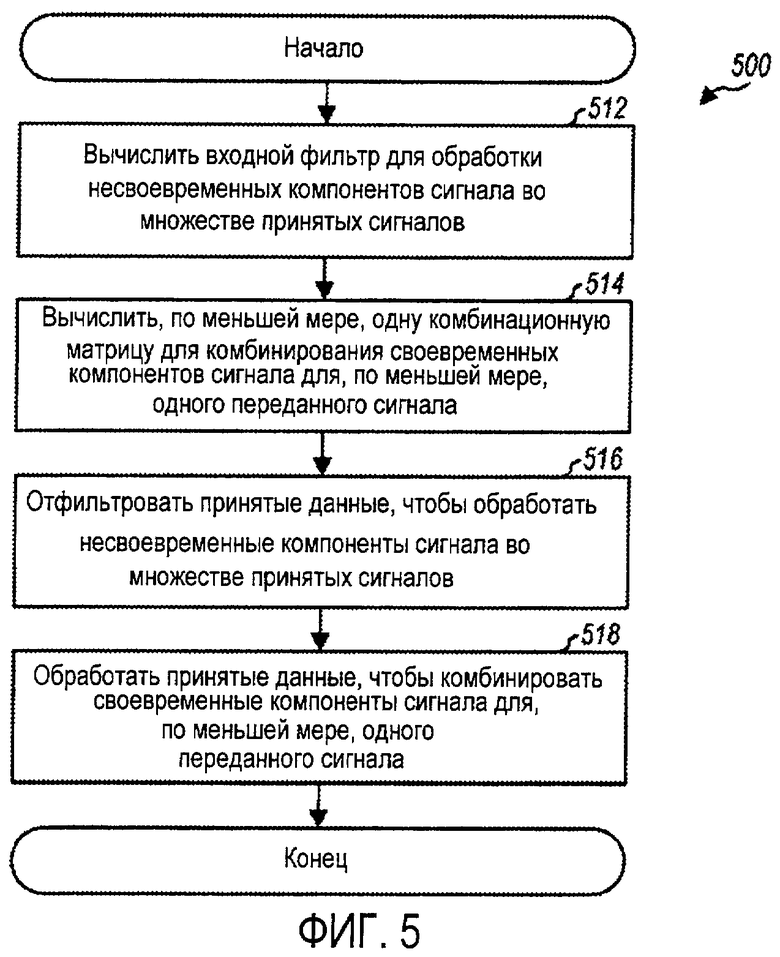
Фиг. 5 - иллюстрация процесса для восстановления MIMO-передачи в приемнике.
Подробное описание
Описанные здесь способы обработки в приемнике могут использоваться для различных систем связи, таких как системы Множественного Доступа с Кодовым Разделением (CDMA), системы Множественного Доступа с Временным Разделением (TDMA), системы Множественного Доступа с Частотным Разделением (FDMA), системы Множественного Доступа с Ортогональным Разделением Частот (OFDMA), системы FDMA с Одной Несущей (SC-FDMA) и т.п. В системе CDMA используется мультиплексирование с кодовым разделением (CDM), и модулированные символы передаются параллельно, используя различные коды разделения на каналы. В системе CDMA может использоваться такая радиотехнология, как Wideband-CDMA (W-CDMA), cdma2000 и т.п. cdma2000 охватывает стандарты IS-2000, IS-856 и IS-95. Система TDMA может использовать такую радиотехнологию, как Глобальная Система Мобильной Связи (GSM). Стандарты W-CDMA и GSM описаны в документах организации "Проект партнерства 3-го поколения" (3GPP). Стандарт cdma2000 описан в документах организации "Второй проект партнерства 3-го поколения" (3GPP2). Документы 3GPP и 3GPP2 находятся в свободном доступе. В системе OFDMA используется мультиплексирование с ортогональным разделением частот (OFDM), и модулированные символы передаются в частотной области на ортогональных поднесущих. В системе SC-FDMA используется мультиплексирование с частотным делением с одной несущей (SC-FDM), и модулированные символы передаются во временной области на ортогональных поднесущих.
Описанные здесь способы могут также использоваться для MIMO-передач по нисходящей линии связи, а также по восходящей линии связи. Нисходящая линия связи (или прямая линия связи) обозначает линию связи от базовых станций к беспроводным устройствам, а восходящая линия связи (или обратная линия связи) обозначает линию связи от беспроводных устройств к базовым станциям. Для ясности, упомянутые способы описаны для MIMO-передачи в системе CDMA, в которой может применяться технология W-CDMA, cdma2000 или какая-либо другая радиотехнология CDMA.
Фиг. 1 иллюстрирует структурную схему передатчика 110 и приемника 150 для MIMO-передачи. Для передачи по нисходящей линии связи передатчик 110 является частью базовой станции, а приемник 150 является частью беспроводного устройства. Для передачи по восходящей линии связи передатчик 110 является частью беспроводного устройства, а приемник 150 является частью базовой станции. Базовая станция, как правило, представляет собой стационарную станцию, которая осуществляет связь с беспроводными устройствами, и ее также называют Узлом B (Node B), точкой доступа и т.п. Беспроводное устройство может быть стационарным или мобильным, и его также называют пользовательским оборудованием (UE), мобильной станцией, терминалом, станцией, абонентским устройством и т.п. Беспроводное устройство может представлять собой сотовый телефон, персональный цифровой секретарь (PDA), беспроводной модем, портативный компьютер, карманный компьютер и т.п.
В передатчике 110 процессор 112 данных передачи принимает данные трафика и сигнализацию, обрабатывает (например, кодирует, перемежает и отображает на символы) принятые данные и предоставляет символы данных. Процессор 112 также генерирует и мультиплексирует символы пилот-сигнала с символами данных. В использованном здесь значении символ данных является символом для данных трафика или сигнализации, а символ пилот-сигнала является символом для пилот-сигнала, причем символ, как правило, является комплексной величиной. Символы данных и символы пилот-сигнала могут представлять собой символы, модулированные по схеме модуляции, такой как фазовая манипуляция (PSK) или квадратурная модуляции (QAM). Пилот-сигнал представляет собой данные, которые априори известны как передатчику, так и приемнику. MIMO-процессор 114 передачи выполняет пространственную или пространственно-временную обработку символов данных и пилот-сигнала, как описано ниже, и предоставляет выходные символы во множество (M) CDMA-модуляторов 116a~116m. Каждый CDMA-модулятор 116 обрабатывает свои выходные символы, как описано ниже, и предоставляет выходные элементарные сигналы в соответствующий блок 118 передатчика. Каждый блок 118 передатчика обрабатывает (например, преобразует в аналоговую форму, усиливает, фильтрует и преобразует с повышением частоты) свои выходные элементарные сигналы и генерирует модулированный сигнал. M модулированных сигналов из M блоков 118a~118m передатчика передаются из M антенн 120a~120m соответственно.
В приемнике 150 множество (N) антенн 152a~152n принимают переданные сигналы через различные каналы распространения в беспроводной среде и предоставляют N принятых сигналов в N блоков 154a~154n приемника соответственно. Каждый блок 154 приемника обрабатывает (например, фильтрует, усиливает, преобразует с понижением частоты и оцифровывает) свои принятые сигналы и предоставляет принятые выборки в процессор 156 канала и эквалайзер/CDMA-демодулятор 160. Процессор 156 вычисляет коэффициенты для входного фильтра/эквалайзера, а также коэффициенты для одной или более комбинирующих матриц, как описано ниже. Блок 160 выполняет коррекцию посредством входного фильтра и CDMA-демодуляции и предоставляет отфильтрованные символы. MIMO-процессор 170 приема комбинирует отфильтрованные символы по пространственному измерению и предоставляет детектированные символы, которые представляют собой оценки переданных символов данных. Процессор 172 данных приема обрабатывает (например, выполняет обратное отображение символов, выполняет обратное перемежение и декодирует) продетектированные символы и предоставляет декодированные данные. В целом, обработка, выполняемая эквалайзером/CDMA-демодулятором 160, MIMO-процессором 170 приема и процессором 172 данных приема, дополняет обработку, выполняемую CDMA-модулятором 116, MIMO-процессором 114 передачи и процессором 112 данных передачи соответственно в передатчике 110.
Контроллеры/процессоры 130 и 180 управляют работой различных обрабатывающих блоков в передатчике 110 и приемнике 150 соответственно. Памяти 132 и 182 хранят данные и программные коды для передатчика 110 и приемника 150 соответственно.
Фиг. 2 представляет собой иллюстрацию передачи по схеме MIMO-CDM. При схеме CDM до C символов могут одновременно передаваться через одну передающую антенну посредством C кодов разделения на каналы, причем обычно C≥1. Эти коды разделения на каналы могут представлять собой коды коэффициента Ортогонального Переменного Расширения (OVSF) в W-CDMA, коды Уолша в cdma2000, другие ортогональные коды или квази-ортогональные коды, псевдослучайные коды и т.п. Каждый код разделения на каналы представляет собой особую последовательность элементарных сигналов. Количество элементарных сигналов в последовательности является длиной или коэффициентом расширения кода разделения на каналы. В целом, любой набор из одного или более кодов разделения на каналы может использоваться для каждой передающей антенны, и коды разделения на каналы могут иметь одинаковые или различные коэффициенты расширения. Для простоты в следующем описании предполагается, что коды разделения на каналы имеют одинаковый коэффициент расширения. Одинаковый набор из C кодов разделения на каналы может быть повторно использован для каждой из M передающих антенн. Для схемы MIMO до M символов могут быть одновременно переданы через M передающих антенн. Для схемы MIMO-CDM до C·M символов могут быть одновременно переданы через M передающих антенн посредством C кодов разделения на каналы. Обработка MIMO может быть выполнена отдельно для каждого из C кодов разделения на каналы. Обработка MIMO выполняется по всем M передающим антеннам для каждого кода разделения на каналы. Обработка CDM может быть выполнена отдельно для каждой из M передающих антенн. Обработка CDM выполняется для всех C кодов разделения на каналы для каждой передающей антенны.
Фиг. 3 иллюстрирует структурную схему CDMA-модулятора 116 для одной передающей антенны m, где m ∈{1,…,M}. CDMA-модулятор 116 может использоваться для каждого из CDMA-модуляторов 116a~116m с Фиг.1. CDMA-модулятор 116 включает в себя процессор 310 данных для каждого кода разделения на каналы, используемого для данных трафика и/или сигнализации, а также процессор 320 пилот-сигнала для пилот-сигналов.
В процессоре 310 данных расширитель 312 расширяет выходные символы d m,c (s) для данных с кодом c разделения на каналы, имеющих последовательность v c (k) элементарных сигналов, где s является индексом символа и k является индексом элементарного сигнала. Умножитель 314 масштабирует выход расширителя 312 спектра посредством коэффициента g m,c усиления и предоставляет элементарные сигналы данных для кода c разделения на каналы. В процессоре 320 пилот-сигнала расширитель 322 расширяет выходные символы d m,p (s) для пилот-сигнала посредством кода p разделения на каналы для пилот-сигнала. Умножитель 324 масштабирует выход расширителя 322 спектра посредством коэффициента g m,p усиления и предоставляет элементарные сигналы пилот-сигнала. Коэффициенты g m,c и g m,p усиления определяют величину мощности передачи, используемой для кода c разделения на каналы и пилот-сигнала соответственно. Сумматор 330 суммирует элементарные сигналы данных и пилот-сигнала для всех кодов разделения на каналы. Скремблер 332 перемножает выход сумматора 330 со скремблирующей последовательностью p(k) для передатчика 110 и предоставляет выходные элементарные сигналы y m (k) для передающей антенны m.
В целом, для каждой из M передающих антенн может использоваться любое количество из C кодов разделения на каналы. В одном варианте для пилот-сигнала для всех M передающих антенн используется одинаковый код разделения на каналы. В другом варианте M кодов разделения на каналы используются для пилот-сигнала для M передающих антенн, а остальные C-M кодов разделения на каналы могут быть повторно использованы для каждой из M передающих антенн. Как показано на Фиг.3, для всех M передающих антенн может использоваться одинаковая скремблирующая последовательность. Альтернативно, для каждой передающей антенны может использоваться различная скремблирующая последовательность. Расширение спектра и скремблирование также может быть выполнено иным способом.
MIMO-канал формируется средой распространения между M передающими антеннами в передатчике 110 и N приемными антеннами в приемнике 150. L символов данных могут быть параллельно переданы из M передающих антенн для каждого кода разделения на каналы, где 1≤L≤min{M, N}. Приемник 150 может анализировать рабочие характеристики (например, пропускную способность) MIMO-канала для различных значений L (и, возможно, различных матриц/векторов передачи) и может выбрать значение L (и матрицу/вектор передачи), при котором достигаются лучшие рабочие характеристики.
Передатчик 110 может выполнять пространственную обработку для каждого кода c разделения на каналы в каждом периоде s символа следующим образом:
d c(s)= B c b c(s), для c = 1,…, C, Уравнение (1)
где b c(s)=[b 1,c(s) b 2,c(s)… b L,c(s)]T является вектором L*1 символов данных,
B c является матрицей L*M передачи для кода c разделения на каналы,
d c(s)=[d 1,c(s) d 2,c(s)… d M,c(s)]T является вектором M*1 выходных символов и "T" обозначает транспозицию.
Каждый элемент b c(s) может соответствовать отдельному потоку данных. Потоки данных могут иметь различные коэффициенты усиления, причем в этом случае матрица B c может иметь различные нормы столбца для различных потоков данных. Уравнение (1) иллюстрирует пространственное кодирование посредством B c. Также может быть выполнено пространственно-временное кодирование, такое как пространственно-временное разнесение передачи (STTD), но это не показано в уравнении (1).
Различные матрицы передачи могут использоваться для различных режимов MIMO, таких как разнесение передачи с замкнутым контуром (CLTD), управление скоростью по каждой антенне (PARC), Bell Labs уровневый пространственно-временной режим с повторным использованием кода (CRBLAST), адаптивная матрица с двойной передачей (Double-Transmit Adaptive Array, D-TXAA) и т.п. В Таблице 1 приведены некоторые режимы MIMO, и для каждого режима приведены L, M,
B
c, а также источник символов данных. В Таблице 1
B
cltd может представлять собой вектор размерностью 2×1, выбранный из группы {[1 e
-j3π/4]T, [1 e
j3π/4]T, [1 e
-jπ/4]T, [1 e
jπ/4]T}.
B
d-txaa может представлять собой матрицу размерностью 2×2, выбранную из группы 
I является единичной матрицей, в которой расположенные на главной диагонали элементы равны единице, а остальные элементы равны нулю.
Передатчик 110 может выполнять обработку CDMA для каждой антенны m в каждом периоде s символа следующим образом:

для m = 1,…, M, Уравнение (2)
где период s символа, соответствующий периоду k элементарного сигнала, задается как s=kdivC=[k/C]. Коэффициент g m,c усиления может быть установлен равным нулю для каждого кода разделения на каналы, который не используется.
Если используются коды разделения на каналы с различными коэффициентами расширения, то обработка CDMA для передающей антенны m может быть выражена как

где Cc является коэффициентом расширения кода c разделения на каналы и
Npc является количеством кодов разделения на каналы, используемых для передающей антенны m.
Для простоты, в следующем описании допускается, что для каждой передающей антенны используются коды разделения на каналы с коэффициентом расширения C. В уравнении (2) выходной символ d m,c (s) расширяется посредством кода c разделения на каналы с коэффициентом C расширения и масштабируется посредством коэффициента g m,c усиления, чтобы получить элементарные сигналы данных. Расширение реализуется путем повторения выходного символа d m,c (s) C раз и умножения полученных копий C выходных символов на C(c) элементарных сигналов v c (k) кода c разделения на каналы. Элементарные сигналы данных и пилот-сигнала всех C кодов разделения на каналы суммируются и дополнительно скремблируются посредством скремблирующей последовательности p(k), чтобы получить выходные элементарные сигналы y m (k) для передающей антенны m. Та же обработка CDMA может быть выполнена для каждой из M передающих антенн.
В приемнике 150 принятые выборки в каждом периоде k элементарного сигнала могут быть выражены как
x (k) = Hy (k) + n (k), Уравнение (3)
где y (k) представляет собой вектор T×1 выходных элементарных сигналов, где T описан ниже,
H представляет собой матрицу R×T характеристики канала, где R описан ниже,
x (k) представляет собой вектор R×1 принятых выборок и
n (k) представляет собой вектор R×1 шума.
Приемник 150 может оцифровывать принятый сигнал от каждой приемной антенны на скорости, равной произведению K на скорость элементарного сигнала, где K является коэффициентом избыточной дискретизации, причем, как правило, K≥1. За каждый период k элементарного сигнала приемник 150 может получить E·K выборок от каждого приемника 154 и сформировать x (k) путем компоновки N·E·K выборок из N приемников 154a-154n. E является длиной входного эквалайзера в приемнике 150 в единицах элементарных сигналов. Обычно E≥1, и она может быть выбрана на основании компромиссного отношения между сложностью приемника и производительностью. x (k) включает в себя R принятых выборок от N приемных антенн для E периодов элементарного сигнала, причем R=N·E·K.
Матрица H содержит импульсные характеристики канала во временной области для всех пар передающих и приемных антенн. Как показано на Фиг.1, между каждой передающей антенной и каждой приемной антенной существует канал распространения, или между M передающими антеннами и N приемными антеннами существует M·N каналов распространения. Каждый канал распространения имеет особую импульсную характеристику, определяемую беспроводной средой. Характеристика канала с одним входом и множеством выходов (SIMO) между передающей антенной m и N приемными антеннами может быть задана как подматрица H m размерностью R×Tm. Количество строк в H m определяется количеством записей в x (k). Количество столбцов в H m определяется длиной E эквалайзера, а также временным интервалом импульсных характеристик между передающей антенной m и N приемными антеннами. Tm может быть выражено следующим образом:

где lm,n представляет собой временной интервал импульсной характеристики между передающей антенной m и приемной антенной n в единицах элементарных сигналов.
Матрица H состоит из M подматриц H m, где m=1,…, M:
H = [ H 1 H 2 … H M ]. Уравнение (5)
H имеет размерность R×T, где T=T1+T2+…+TM.
Вектор y (k) состоит из M подвекторов y m (k), где m=1,…, M, для M передающих антенн. Каждый подвектор y m (k) включает в себя Tm выходных элементарных сигналов от одной передающей антенны m, центрированных в периоде k элементарного сигнала. Вектор y (k) и подвектор y m (k) могут быть выражены следующим образом:
Уравнение (3) также может быть выражено следующим образом:

Для модели, показанной в уравнении (7), за каждый период k элементарного сигнала T m выходных элементарных сигналов передаются от каждой передающей антенны m к N приемным антеннам через SIMO-канал с характеристикой H m. Принятые выборки в x {k) включают в себя вклады от всех M передающих антенн. x (k), y (k) и H могут быть относительно большими. Например, если M=2, N=2, K=2, E=20, T=48 и R=80, то y (k) будет вектором размерностью 48×1, H будет матрицей размерностью 80×48, а x (k) будет вектором размерностью 80×1. Можно допустить, что шум может быть постоянным комплексным случайным вектором с
E{ n (k)}= 0 , Уравнение (8)
E{ n (k) n H(k)}= R nn, Уравнение (9)
где E{} представляет собой операцию математического ожидания, 0 является вектором с нулевыми элементами, а R nn представляет собой матрицу ковариации шума размерностью R×R, причем "H" обозначает сопряженную транспозицию. Уравнения (8) и (9) показывают, что шум имеет нулевое среднее значение и матрицу R nn ковариации.
Приемник 150 может восстановить символы данных в bc(s) для каждого кода c разделения на каналы путем фильтрации принятых выборок в x (k) посредством группы из L фильтров для кода c разделения на каналы и дескремблирования отфильтрованных выборок следующим образом:
где
 Уравнение (11)
Уравнение (11)
 Уравнение (12)
Уравнение (12)
 Уравнение (13)
Уравнение (13)
W c представляет собой общий фильтр размерностью L×R для кода c разделения на каналы,
 представляет собой оценку
b
c
(s) и
представляет собой оценку
b
c
(s) и
"*" обозначает комплексное сопряжение.
Θ c (s) представляет собой вектор T×1 обратно расширенных символов для кода c разделения на каналы, который получается на основании переданных элементарных сигналов. n c (s) представляет собой вектор R×1 шума для кода c разделения на каналы после дескремблирования и сжатия. n c (s) сохраняет статистику n (k), которые независимы от кода c разделения на каналы. χ c (s) представляет собой вектор R×1 сжатых символов для кода c разделения на каналы, который получается на основании принятых выборок. W c включает в себя группу из L фильтров для кода c разделения на каналы. Уравнение (10) указывает, что обработка посредством W c может быть эквивалентно выполнена по символам в χ c(s) вместо принятых выборок в x (k).
Фильтр W c может представлять собой фильтр Уайнера, который может быть выведен следующим образом:
где Γ c = E{ Θ c (s) Θ H c (s)}, Уравнение (15)
γ c = E{ Θ c (s) b H c (s)}, Уравнение (16)
R c = H Γ c H H + R nn. Уравнение (17)
Γ c представляет матрицу ковариации Θ c (s) размерностью T×T. γ c представляет собой матрицу корреляции Θ c (s) размерностью T×L и b c(s), и она является показателем характеристики переданного сигнала. R c является матрицей корреляции размерностью R×R для беспроводного канала, сигнала и статистики шума. Матрицы Γ c, γ c и R c зависят от кода c разделения на каналы в силу матрицы B c передачи и коэффициента g m,c усиления.
Матрица Γ c может быть выражена как
 Уравнение (18)
Уравнение (18)
где  является частью Γ
c, которая не зависит от кода c разделения на каналы. Может быть показано, что только M элементов матрицы γ
c имеют ненулевое значение. Индексы ненулевых элементов матрицы γ
c таковы, что матрица Φ
c размерностью R×L может быть выражена как
является частью Γ
c, которая не зависит от кода c разделения на каналы. Может быть показано, что только M элементов матрицы γ
c имеют ненулевое значение. Индексы ненулевых элементов матрицы γ
c таковы, что матрица Φ
c размерностью R×L может быть выражена как
 Уравнение (19)
Уравнение (19)
где  является матрицей размерностью R×M, которая содержит "несвоевременные" столбцы матрицы
H
, а
является матрицей размерностью R×M, которая содержит "несвоевременные" столбцы матрицы
H
, а
G
c является диагональной матрицей размерностью M×M, которая содержит  , где m=1…,M, по диагонали, остальные элементы которой имеют нулевое значение.
, где m=1…,M, по диагонали, остальные элементы которой имеют нулевое значение.
Как показано в уравнении (5),
H
содержит T=T1+T2+…+TM столбцов для M передающих антенн. содержит M столбцов матрицы
H
, или по одному столбцу для каждой передающей антенны. M столбцов матрицы  умножают M элементов в
y
(k), время элементарных сигналов которой выровнено посредством операции сжатия в уравнении (10). Эти M столбцов могут быть идентифицированы, как описано ниже.
умножают M элементов в
y
(k), время элементарных сигналов которой выровнено посредством операции сжатия в уравнении (10). Эти M столбцов могут быть идентифицированы, как описано ниже.
Тогда матрица R c в уравнении (17) может быть выражена как
где
 Уравнение (21)
Уравнение (21)
Матрица W c в уравнении (14) может быть выражена как:
где
 и
и
 Уравнение (24)
Уравнение (24)
В уравнении (23) F является относительно большой матрицей размерностью R×M, которая не зависит от кода разделения на каналы. В уравнении (24) Δ c является небольшой матрицей размерностью M×L, которая содержит зависящие от кода матрицы в W c.
Уравнения (10)-(24) показывают, что обработка в приемнике 150 может быть выполнена в двух каскадах. Первый каскад фильтрует принятые выборки x (k) посредством входного фильтра F , который не зависит от кода разделения на каналы и, сверх того, сжимает и дескремблирует отфильтрованные выборки, чтобы получить отфильтрованные символы. Для всех кодов разделения на каналы может использоваться один входной фильтр. Второй каскад комбинирует отфильтрованные символы посредством комбинирующей матрицы Δ c для каждого кода c разделения на каналы, чтоб получить продетектированные символы для этого кода разделения на каналы. Входной фильтр и комбинирующие матрицы могут обновляться по отдельности с одинаковой или различной частотой.
Обработка многокаскадного приемника может быть выполнена множеством способов. В следующем описании принято допущение, что символы пилот-сигнала передаются посредством матрицы передачи B c= I с использованием одинакового кода p разделения на каналы для каждой из M передающих антенн. Кроме того, предполагается, что символы пилот-сигнала не являются коррелированными или они ортогональны, так что E{ b p (s) b p H (s)}=I, где b p (s) представляет собой вектор M×1 из символов пилот-сигнала, переданных из M передающих антенн за период s символа.
В одном варианте приемника входной фильтр F выводится и используется для первого каскада (например, для блока 160 с Фиг.1), и комбинирующая матрица Δ c вычисляется для каждого кода разделения на каналы и используется для второго каскада (например, для блока 170 с Фиг.1).
Для обучения на уровне символа фильтр может быть выведен на основании символов пилот-сигнала, используя критерий наименьших квадратов следующим образом:
 Уравнение (25)
Уравнение (25)
где χ p (s) является вектором R×1 сжатых символов пилот-сигнала,
W h является кандидатом фильтрующей матрицы размерностью R×M,
W p является фильтрующей матрицей размерностью R×M, вычисленной на основании символов пилот-сигнала, и
P является количеством символов пилот-сигнала, использованных для выведения W p.
Сжатые символы пилот-сигнала в χ p (s) могут быть получены так, как показано в уравнении (13), хотя и с использованием кода p разделения на каналы пилот-сигнала вместо кода c разделения на каналы. По критерию наименьших квадратов среди всех являющихся кандидатом фильтрующих матриц выбирается фильтрующая матрица, для которой величина с правой стороны уравнения минимизируется. Выбранная фильтрующая матрица предоставляется в качестве фильтрующей матрицы W p наименьших квадратов.
Когда P→∞ в уравнении (25), W p может быть выражено как
W p =[E{χ p (s)χ p H (s)}] -1 E{χ p (s) b p H (s)}. Уравнение (26)
Для обучения на уровне символа W p может быть выведена следующим образом. Сжатые символы пилот-сигнала в χ p (s) могут быть получены из принятых выборок, как показано в уравнении (13). Векторное произведение χ p (s)χ p H (s) размерностью R×R может быть вычислено и усреднено по достаточному количеству символов пилот-сигналов. Векторное произведение χ p (s) b p H (s) размерностью R×M также может быть вычислено и усреднено. W p может быть вычислена на основании двух усредненных векторных произведений. W p также может быть вычислено на основании рекурсивного метода наименьших квадратов, метода блочных наименьших квадратов или некоторого другого известного способа.
Для обучения на уровне элементарного сигнала фильтр может быть выведен на основании принятых выборок, используя критерий наименьших квадратов, следующим образом:
 Уравнение (27)
Уравнение (27)
где b p (s)*v p (k)*p(k) является вектором M×1 элементарных сигналов пилот-сигнала, полученных путем расширения и скремблирования символов пилот-сигналов.
Когда P→∞ в уравнении (27), W p может быть выражено как:
W p = [E{ x (k) x H(k)}]-1 E{ x (k) b p H(s)*v p(k)*p(k)}. Уравнение (28)
Для обучения на уровне элементарного сигнала W p может быть выведена следующим образом. Векторное произведение x (k) x H(k) размерностью R×R может быть вычислено на основании принятых выборок и усреднено по достаточному количеству пилот-символов. Векторное произведение x (k) b p H(s)*v p(k)*p(k) размерностью R×M также может быть вычислено и усреднено. W p может быть вычислено на основании двух усредненных векторных произведений.
Из уравнения (22) W p может быть выражена как

где
 Уравнение (30)
Уравнение (30)
Матрица P p размерностью M×M может быть оценена следующим образом:
 Уравнение (31)
Уравнение (31)
Оценка P p становится более точной в пределе, когда P→∞. Аналогично W p, P p также может быть оценена на основании элементарных сигналов пилот-сигнала вместо символов пилот-сигнала.
Входной фильтр F может быть выведен на основании уравнения (29) следующим образом:
F = W p( I + P p) G p -1. Уравнение (32)
Комбинирующая матрица Δ c может быть выведена на основании уравнений (24) и (30) следующим образом:
Δ c = G c B c( I + B c H G c G p -1 P p G p -1 G c B c ) -1 . Уравнение (33)
Фильтр W c может быть выражен на основании W p и P p следующим образом:

Как показано в уравнении (32), входной фильтр F может быть выведен на основании W p и P p , которые, в свою очередь, оцениваются на основании символов или элементарных сигналов пилот-сигнала. Как показано в уравнении (33), комбинационная матрица Δ c для каждого кода c разделения на каналы может быть получена на основании P p, матриц G p и G c коэффициентов усиления для пилот-сигнала и данных, а также матрицы B c передачи для кода c разделения на каналы. Выражение G c G p -1 также упоминается как отношение трафика к пилот-сигналу, и оно может быть известно (например, посредством сигнализации) или оценено приемником. Как правило, достаточно оценить отношение G c G p -1 трафика к пилот-сигналу, и нет необходимости по отдельности оценивать G p и G c.
Приемник 150 может восстановить символы данных в b c (s) следующим образом:
 Уравнение (35)
Уравнение (35)
Приемник 150 может выполнять обработку для уравнения (35) в двух каскадах. В первой части первого каскада приемник 150 может выполнять входную фильтрацию в каждом периоде k элементарного сигнала следующим образом:
v (k)= F H x (k), Уравнение (36)
где v (k) является вектором отфильтрованных выборок размерностью M×1.
Во второй части первого каскада приемник 150 может выполнять сжатие и дескремблирование отфильтрованных выборок для каждого кода c разделения на каналы следующим образом:
 Уравнение (37)
Уравнение (37)
где  представляет собой вектор M×1 отфильтрованных выборок, который является оценкой
d
c
(s)
.
представляет собой вектор M×1 отфильтрованных выборок, который является оценкой
d
c
(s)
.
Во втором каскаде приемник 150 может выполнять комбинирование для каждого кода c разделения на каналы следующим образом:
 Уравнение (38)
Уравнение (38)
Приемник 150 может также восстановить символы данных в b c (s) следующим образом:
 Уравнение (39)
Уравнение (39)
Уравнение (39) также может быть выполнено в двух каскадах. В первой части первого каскада приемник 150 может выполнить сжатие и дескремблирование принятых выборок для каждого кода c разделения на каналы, чтобы получить сжатые символы для этого кода разделения на каналы. Во второй части первого каскада приемник 150 может выполнить фильтрацию сжатых символов для каждого кода c разделения на каналы посредством одного и того же входного фильтра F , чтобы получить отфильтрованные выборки для этого кода разделения на каналы. Во втором каскаде приемник 150 может комбинировать отфильтрованные символы для каждого кода c разделения на каналы посредством комбинирующей матрицы Δ c для этого кода разделения на каналы.
W p получается на основании символов или элементарных сигналов пилот-сигнала, и он может не обеспечить оптимальную настройку, например, поскольку для обучения используется конечное число символов (P) пилот-сигнала. В таких случаях использование F и Δ c, полученных на основании W p, может привести к ухудшению рабочих характеристик.
В другом варианте приемника W p используется в качестве входного фильтра для первого каскада. Комбинирующая матрица D c вычисляется для каждого кода c разделения на каналы и используется для второго каскада.
Отфильтрованные символы, полученные посредством W p, могут быть выражены следующим образом:
где
 Уравнение (41)
Уравнение (41)
и
z c (s) является вектором M×1 отфильтрованных символов для кода c разделения на каналы.
Символы данных в b c (s) могут быть получены следующим образом:
 Уравнение (42)
Уравнение (42)
где D c является комбинирующей матрицей M×L для кода c разделения на каналы.
Комбинирующая матрица D c может быть получена на основании критерия минимальной среднеквадратической ошибки следующим образом:
D c = ( A c A c H + R nn,c)-1 A c. Уравнение (43)
Матрица R nn,c ковариации шума может быть оценена следующим образом:
где 
Второе равенство в уравнении (44) истекает из того, что несмещенная оценка A p равна P p.
Матрица A c размерностью M×L может быть выражена следующим образом:
A c = A p G p -1 G c B c. Уравнение (45)
Как показано в уравнении (45), матрица A c может быть вычислена для каждого кода c разделения на каналы на основании (a) матрицы P p, оцененной из символов или элементарных сигналов пилот-сигнала и применимой для всех кодов разделения на каналы, и (b) отношения G p -1 G c трафика к пилот-сигналу и матрицы B c передачи, которые специфичны для каждого кода c разделения на каналы. Как показано в уравнении (43), комбинационная матрица D c может быть вычислена для каждого кода c разделения на каналы на основании (a) матрицы R nn,c ковариации шума, которая применима для всех кодов разделения на каналы, и (b) матрицы A c, вычисляемой для кода c разделения на каналы.
Комбинационная матрица D c также может быть оценена для каждого кода c разделения на каналы следующим образом:
 Уравнение (46)
Уравнение (46)
D c = R zz -1 A c, Уравнение (47)
где R zz представляет собой матрицу M×M ковариации для z c (s).
В уравнении (46) векторное произведение z c (s) z c H (s) может быть вычислено для каждого кода разделения на каналы и, далее, усреднено по всем кодам разделения на каналы с одинаковой матрицей В с передачи и дополнительно усреднено по достаточному числу периодов символов для получения ковариационной матрицы R zz. D c может быть вычислено на основе A c и инверсии R zz.
Приемник 150 может восстановить символы данных в b c (s) следующим образом:
 Уравнение (48)
Уравнение (48)
В уравнении (48) приемник 150 может фильтровать принятые выборки посредством входного фильтра W p, затем сжимать и дескремблировать отфильтрованные выборки для каждого кода С разделения на каналы и затем комбинировать отфильтрованные символы каждого кода разделения на каналы посредством комбинирующей матрицы D c.
Приемник 150 может также восстановить символы данных в b c (s) следующим образом:
 Уравнение (49)
Уравнение (49)
В уравнении (49) приемник 150 может выполнить сжатие и дескремблирование принятых выборок для каждого кода c разделения на каналы, отфильтровать сжатые символы для каждого кода разделения на каналы посредством входного фильтра W p и, далее, комбинировать отфильтрованные символы для каждого кода разделения на каналы посредством комбинирующей матрицы D c.
Обработка в приемнике также может быть выполнена множеством различных способов. Ниже описана конкретная конструкция приемника.
Фиг.4 иллюстрирует структурную схему различных блоков в приемнике 150 с Фиг.1. В данной конструкции входная фильтрация выполняется до CDMA-демодуляции. Блок 160 включает в себя входной фильтр/эквалайзер 410 и CDMA-демодулятор 420. Демодулятор 420 включает в себя C дескремблеров/блоков сжатия 422a~422C для кодов разделения на каналы для данных трафика, причем количество кодов разделения на каналы составляет не более C. Блок 170 включает в себя С блоков 432a-432C комбинирования для кодов разделения на каналы, используемых для данных трафика, причем количество кодов разделения на каналы составляет не более C.
В процессоре 156 канала блок 422 оценки временных характеристик определяет временные характеристики принятых сигналов. Блок 422 может оценивать импульсные характеристики канала и/или профили задержки мощности для различных антенн, а также определять центр тяжести импульсных характеристик канала и/или профилей задержки мощности. Блок 422 может определить временные характеристики принятых сигналов на основании центра тяжести.
Блок 444 вычисления коэффициента вычисляет коэффициенты для фильтра W p на основании принятых выборок, например, как показано в уравнении (28). Блок 444 также может вычислить W p на основании рекурсивного метода наименьших квадратов, метода блочных наименьших квадратов или некоторого другого способа. Информация из блока 442 также может использоваться для обучения, например для выравнивания локально сгенерированных элементарных сигналов пилот-сигнала с принятыми выборками. Блок 444 предоставляет W p во входной фильтр 410.
Фильтр 410 выполняет входную фильтрацию/коррекцию принятых выборок x (k) посредством W p и предоставляет отфильтрованные выборки. В демодуляторе 420 каждый блок 420 выполняет сжатие и дескремблирование отфильтрованных выборок для различных кодов разделения на каналы и предоставляет отфильтрованные символы z c (s) для этого кода разделения на каналы.
Блок 446 выполняет сжатие и дескремблирование отфильтрованных выборок для кода p разделения на каналы пилот-сигнала. Блоки 422 и 446 выполняют сжатие и дескремблирование на основании временных характеристик, предоставляемых блоком 442. Блок 448 оценки канала оценивает матрицу  размерностью M×M на основании отфильтрованных символов пилот-сигнала из блока 446. Блок 450 вычисляет векторное произведение
z
c
(s)
z
c H
(s) для каждого кода разделения на каналы, усредняет векторное произведение по кодам разделения на каналы и периодам символа и предоставляет матрицу
R
zz корреляции, например, как показано в уравнении (46). Блок 452 вычисляет коэффициенты для комбинирующей матрицы
D
c для каждого кода c разделения на каналы на основании матрицы
размерностью M×M на основании отфильтрованных символов пилот-сигнала из блока 446. Блок 450 вычисляет векторное произведение
z
c
(s)
z
c H
(s) для каждого кода разделения на каналы, усредняет векторное произведение по кодам разделения на каналы и периодам символа и предоставляет матрицу
R
zz корреляции, например, как показано в уравнении (46). Блок 452 вычисляет коэффициенты для комбинирующей матрицы
D
c для каждого кода c разделения на каналы на основании матрицы  из блока 448, матрицы
R
zz корреляции из блока 450 и свойственных коду матриц следующим образом:
из блока 448, матрицы
R
zz корреляции из блока 450 и свойственных коду матриц следующим образом:
 Уравнение (50)
Уравнение (50)
В MIMO-процессоре 170 приема каждый блок 452 комбинирования комбинирует отфильтрованные символы для различных кодов c разделения на каналы на основании комбинирующей матрицы D c и предоставляет продетектированные символы для этого кода разделения на каналы.
Приемник 150 может оценивать качество принятого сигнала, которое может быть количественно определено посредством Отношения Сигнала к Шуму и Помехам (SINR) и т.п. Продетектированные символы из уравнения (42) могут быть выражены следующим образом:

где L c H= D c H A c и w c(s)= D c H n c (s). Ковариация n c (s) может быть задана как R nn,c=E{ n c (s) n c H (s)}. Ковариация w c(s) может быть задана как R ww,c = D c H R nn,c D c.
SINR l-го элемента матрицы , b
l,c
(s), может выражено следующим образом:
 Уравнение (52)
Уравнение (52)
где L c (l,l) представляет собой (l,l)-й элемент L c и
R ww,c (l,l) представляет собой (l,l)-й элемент R ww,c.
SINR {b l,c (s)} представляет собой SINR l-го потока данных, переданного с кодом c разделения на каналы, и оно может быть использовано, чтобы выбирать скорость передачи данных для этого потока данных. SINR для каждого кода c разделения на каналы зависит от матрицы B c передачи, используемой для этого кода разделения на каналы. Приемник 150 может определять SINR для различных возможных матриц передачи и передавать матрицу передачи с наибольшим SINR. Приемник 150 может передавать информацию обратной связи в передатчик 110. Эта информация обратной связи может содержать матрицу передачи, выбранную для каждого кода разделения на каналы, SINR или скорость передачи данных для каждого кода разделения на каналы, среднее SINR или скорость передачи данных для всех кодов разделения на каналы и т.п.
В целом, входная фильтрация может быть выполнена в первом каскаде, чтобы обработать несвоевременные компоненты сигналы в M принятых сигналах. Входной фильтр, как правило, не зависит от того, каким образом обрабатываются сигналы в передатчике до самой передачи. Для CDM-передачи входной фильтр может применяться для всех кодов разделения на каналы. Второй каскад может комбинировать своевременные компоненты сигнала, чтобы восстанавливать L переданных сигналов. Комбинационные матрицы, используемые во втором каскаде, могут быть зависимы от того, каким образом сигналы обрабатываются до передачи (например, матрицы
B
c передачи и матрицы
G
c коэффициентов усиления, используемые передатчиком), а также от других факторов (например, характеристики  канала и статистики Rzz сигнала).
канала и статистики Rzz сигнала).
Фиг.5 иллюстрирует процесс 500 для восстановления MIMO-передачи в приемнике. Вычисляется входной фильтр для обработки (например, компенсации, подавления или уменьшения) несвоевременных компонентов сигнала во множестве принятых сигналов (блок 512). Входной фильтр не изолирует несвоевременные компоненты сигнала. Вместо этого входной фильтр обрабатывает несвоевременные компоненты сигнала желаемым/эффективным способом, и он также может (случайно) обработать своевременные компоненты сигнала. Также вычисляется, по меньшей мере, одна комбинационная матрица для комбинирования своевременных компонентов сигнала для множества передаваемых сигналов (блок 514). Входной фильтр может быть вычислен по F, как показано в уравнении (32), а комбинационные матрицы могут быть вычислены по Δ c, как показано в уравнении (33). Входной фильтр также может быть вычислен по W p, как показано в уравнении (26) или (28), и комбинирующие матрицы могут быть вычислены по D c, как, например, показано в уравнении (43), (47) или (50). Входной фильтр и комбинирующие матрицы также могут быть вычислены другими способами. Входной фильтр может быть вычислен на основании принятых данных для пилот-сигнала согласно, например, критерию наименьших квадратов. Комбинационные матрицы могут быть вычислены на основании матриц передачи, используемых для передачи данных, коэффициентов усиления, используемых для данных, оценки характеристики канала, входного фильтра, статистики сигнала и/или шума и т.п. Комбинационные матрицы также могут быть вычислены согласно критерию минимальной среднеквадратичной ошибки или иному критерию.
Принятые данные фильтруются, чтобы обработать несвоевременные компоненты сигнала во множестве принятых сигналов (блок 516). Отфильтрованные данные обрабатываются, чтобы комбинировать своевременные компоненты сигнала для множества переданных сигналов (блок 518). Принятые данные для более чем одного периода символа могут быть отфильтрованы так, чтобы обработать несвоевременные компоненты сигнала. Отфильтрованные данные для одного периода символа могут быть обработаны так, чтобы комбинировать своевременные компоненты сигнала. Принятые данные и отфильтрованные данные могут быть заданы в выборках, символах и т.п.
Для CDM-передачи, выполняемой посредством множества кодов разделения на каналы, может быть вычислен один входной фильтр, который используется для обработки несвоевременных компонентов сигнала, и может быть вычислено множество комбинационных матриц, которые используются для комбинирования своевременных компонентов сигнала для множества кодов разделения на каналы. В одной схеме принятые данные сначала фильтруются посредством входного фильтра, чтобы получить промежуточные данные. Далее, выполняется сжатие промежуточных данных для каждого кода разделения на каналы, чтобы получить отфильтрованные данные для каждого кода разделения на каналы. Отфильтрованные данные для каждого кода разделения на каналы далее обрабатываются посредством комбинационной матрицы для данного кода разделения на каналы, чтобы получить выходные данные для кода разделения на каналы. В еще одной схеме сначала выполняется сжатие принятых данных для каждого кода разделения на каналы, чтобы получить сжатые данные для каждого кода разделения на каналы. Затем сжатые данные для каждого кода разделения на каналы фильтруются посредством входного фильтра, чтобы получить отфильтрованные данные для кода разделения на каналы. Отфильтрованные данные для каждого кода разделения на каналы далее обрабатываются посредством комбинационной матрицы для данного кода разделения на каналы, чтобы получить выходные данные для кода разделения на каналы.
Для CDM входной фильтр может быть вычислен на основании принятых данных и известного пилот-сигнала, например на основании (a) выборок для принятых данных и элементарных сигналов известного пилот-сигнала для обучения на уровне элементарного сигнала или (b) сжатых символов пилот-сигнала, полученных из принятых данных, и символов известного пилот-сигнала для обучения на уровне символа. Комбинационные матрицы могут быть вычислены на основании матриц передачи, используемых для множества кодов разделения на каналы, коэффициентов усиления для множества кодов разделения на каналы, оценки характеристики канала, входного фильтра, статистики сигнала и/или шума и т.п. или их сочетаний. Входной фильтр и оценка характеристики канала могут быть оценены совместно, например, как
W
p H
 .
.
Многокаскадный приемник также может использоваться для других систем связи. Например, в системе с мультиплексированием с временным разделением входной фильтр может быть вычислен на основании пилот-сигнала, принятого за первый временной интервал, а комбинационная матрица для второго временного интервала может быть вычислена на основании матрицы передачи, используемой в течение второго временного интервала. Данные, принятые в течение второго временного интервала, могут быть отфильтрованы посредством входного фильтра, и отфильтрованные данные могут быть дополнительно обработаны посредством комбинационной матрицы.
В принципе, фильтр может быть вычислен на основании пилот-сигнала, который может быть передан с конкретным кодом разделения на каналы и/или в конкретном временном интервале, используя конкретную матрицу передачи и коэффициент усиления. Фильтр, вычисленный из пилот-сигнала, может быть использован для получения фильтра для данных, которые могут быть переданы с другими кодами разделения на каналы и/или в течение других временных интервалов, возможно, используя другие матрицы передачи и коэффициенты усиления.
Для CDMA своевременные и несвоевременные компоненты сигнала могут быть селектированы по времени, когда они были переданы. Приемник может обработать окно выборок, чтобы восстановить желаемый символ, переданный передатчиком. Временные характеристики эквалайзера определяют временной момент относительно окна, указывающий момент времени, когда желаемый символ передается. Выборки, полученные приемником, содержат различные аддитивные компоненты сигнала, включающие в себя своевременные и несвоевременные компоненты сигнала. Своевременные компоненты сигнала представляют собой компоненты сигнала для желаемого символа, а также других символов, которые были переданы в то же время, что и желаемый символ. Все другие компоненты сигнала являются несвоевременными компонентами сигнала, которые включают в себя компоненты, обратно прослеживающие символы, переданные до и после желаемого символа.
Символ может быть передан посредством функции передачи, которая может зависеть от одного или более параметров. Например, функция передачи может зависеть от периода s символа, кода c разделения на канала, индекса n частотного слота или поднесущей и т.п., и данная функция может быть обозначена как ƒ(s,c,n,…). Для простоты функция передачи может зависеть от трех параметров s, c и n или кортежа (s,c,n). Функции передачи для различных символов могут быть ортогональны, так что 〈ƒ(s 1 ,c 1 ,n 1 ),f(s 2 ,c 2 ,n 2 )〉≠0, только если s 1=s 2 , c 1 =c 2 и n 1 =n 2 , что может быть выражено как (s 1 ,c 1 ,n 1 )=(s 2 ,c 2 ,n 2 ).
Принятый сигнал может включать в себя (a) желаемые компоненты сигнала из первой функции ƒ(s 1 ,c 1 ,n 1 ) передачи, определенной кортежем (s 1 ,c 1 ,n 1 ), и (b) другие компоненты сигнала из других функций ƒ(s,c,n) передачи, где (s,c,n)≠(s 1 ,c 1 ,n 1 ). Входная фильтрация в первом каскаде обрабатывает другие компоненты сигнала. Блок комбинирования во втором каскаде обрабатывает желаемые компоненты сигнала.
Для CDM функции передачи для периода s символа определяются кодами разделения на каналы с длиной C, умноженными на скремблирующую последовательность p(k). Функция передачи для периода s символа и кода c разделения на каналы может быть обозначена как ƒ(s,c). С точки зрения символа, переданного посредством функции ƒ(s 1 ,c 1 ) передачи, принятый сигнал содержит следующие компоненты:
1. Несвоевременные компоненты, соответствующие ƒ(s,c) для s≠s 1 ,
2. Своевременные компоненты сигнала, соответствующие ƒ(s 1 ,c) и состоящие из:
a. своевременных компонентов сигнала из желаемого кода разделения на каналы, соответствующих ƒ(s 1 ,c 1 ), и
b. своевременных компонентов сигнала из других кодов разделения на каналы, соответствующих ƒ(s 1 ,c 2 ) для c1≠c2 .
Входной фильтр обрабатывает несвоевременные компоненты сигнала, соответствующие ƒ(s,c). Дескремблирование и сжатие, выполняемое входным фильтром, также аннулирует компоненты сигнала из других кодов разделения на каналы, соответствующие ƒ(s 1 ,c 2 ). Блок комбинирования обрабатывает своевременные компоненты сигнала из желаемого кода разделения на каналы, соответствующие ƒ(s 1 ,c 1 ).
В системе с одной несущей, в которой не используется CDM, функции передачи могут представлять собой цифровые дельты во времени и могут быть заданы как ƒ(s)=δ(t-s). По мере измерения времени t позиция дельты изменяется во времени.
В системах, основанных на OFDM, функции передачи могут соответствовать различным поднесущим и могут быть заданы как ƒ(s,n), где n является индексом поднесущей. Поднесущие в OFDM могут соответствовать кодам разделения на каналы в CDM. Передатчик может передать N символов данных/пилот-сиснала по N поднесущим в течение периода OFDM-символа для заданной передающей антенны путем (a) преобразования N символов данных/пилот-сигнала во временную область посредством обратного быстрого преобразования Фурье, чтобы получить N выборок временной области, и (b) присоединения циклического префикса к выборкам временной области, чтобы получить OFDM-символ. Приемник может получить принятые символы данных/пилот-сигнала для заданной приемной антенны путем (a) удаления циклического префикса в принятых выборках и (b) преобразования N принятых выборок в частотную область посредством быстрого преобразования Фурье, чтобы получить N принятых символов для N поднесущих. Принятые символы могут соответствовать z c (s) в уравнении (40), где нижний индекс c заменяется индексом n поднесущей. Для OFDM своевременные компоненты сигнала могут быть компонентами сигнала, переданными на конкретной поднесущей из различных передающих антенн. Несвоевременные компоненты сигнала могут представлять собой компоненты сигнала, переданные на других поднесущих. Входной фильтр может быть реализован посредством быстрого преобразования Фурье и удаления циклического префикса в приемнике. Комбинирующая матрица D c может быть вычислена для каждой поднесущей и может использоваться, чтобы комбинировать принятые символы из всех приемных антенн для данной поднесущей.
Специалистам в данной области техники будет очевидно, что информация и сигналы могут быть представлены посредством любой технологии и способа из широкого спектра таковых. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементарные сигналы, которые, возможно, упоминались в вышеизложенном описании, могут быть представлены посредством напряжений, токов, электромагнитных волн, магнитных полей или частиц, оптических полей или частиц или их любым сочетанием.
Специалистам в данной области техники также будет понятно, что различные иллюстративные логические блоки, модули, схемы и этапы алгоритмов, описанные в связи с данным раскрытием, могут быть реализованы электронными аппаратными средствами, компьютерным программным обеспечением или их комбинацией. Для ясной иллюстрации этой взаимозаменяемости аппаратных средств и программного обеспечения различные иллюстративные компоненты, блоки, модули, схемы и этапы выше были описаны в терминах их функциональности. Способ реализации такой функции - аппаратными средствами или программным обеспечением - зависит от конкретного приложения и конструктивных ограничений, налагаемых на систему в целом. Специалисты в данной области техники могут реализовать описанные функции различными способами для каждого конкретного применения, но подобные решения реализации не должны быть интерпретированы как выходящие за рамки объема настоящего раскрытия.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с настоящим раскрытием, могут быть реализованы или выполнены посредством процессора общего назначения, цифрового процессора сигналов, специализированной микросхемы, программируемой вентильной матрицы или другого программируемого логического устройства, дискретного вентиля или транзисторной логической схемы, дискретных аппаратных компонентов или их любой комбинации, предназначенной для выполнения описанных здесь функций. Процессор общего назначения может быть микропроцессором, но альтернативно процессор может быть любым обычным процессором, контроллером, микроконтроллером или конечным автоматом. Процессор также может быть реализован как комбинация вычислительных устройств, например комбинация цифрового процессора сигналов и микропроцессора, множество микропроцессоров, один или более микропроцессоров в сочетании с цифровым процессором сигналов в качестве ядра или любая другая такая конфигурация.
Этапы способа или алгоритма, описанного в связи с настоящим раскрытием, могут быть осуществлены непосредственно аппаратно, посредством программного модуля исполняемого процессором или посредством комбинации этих двух вариантов. Программный модуль может храниться в памяти ОЗУ, флэш-памяти, памяти ПЗУ, памяти СППЗУ, памяти ЭСППЗУ, регистрах, жестких дисках, съемных дисках, дисках CD-ROM или любой другой известной форме носителей данных. Приведенный для примера носитель данных соединяется с процессором так, чтобы процессор мог считывать информацию с носителя данных и записывать информацию на него. Альтернативно, носитель данных может быть интегрирован с процессором. Процессор и носитель данных могут быть в специализированной микросхеме. Специализированная микросхема может быть в терминале пользователя. Альтернативно, процессор и носитель данных могут быть расположены в терминале пользователя как раздельные компоненты.
Предшествующее описание раскрытия предоставлено, чтобы предоставить возможность специалистам в данной области техники реализовать или использовать настоящее раскрытие. Специалистам в данной области техники будут очевидны различные модификации настоящего раскрытия, и описанные здесь ключевые принципы могут применяться к другим вариантам в рамках сущности или объема настоящего раскрытия. Следовательно, настоящее раскрытие не ограничивается описанными здесь примерами, а ему следует сопоставить самый широкий объем в соответствии с описанными здесь принципами и новыми отличительными признаками.
Настоящее изобретение относится к способу для приема и передачи со множеством входов и множеством выходов (MIMO). Технический результат настоящего изобретения заключается в повышении эффективности приема MIMO-передачи. Приемник обрабатывает принятые данные из множества приемных антенн во множестве каскадов. Первый каскад выполняет входную фильтрацию/коррекцию принятых данных посредством входного фильтра, чтобы обрабатывать несвоевременные компоненты сигнала во множестве принятых сигналов. Второй каскад обрабатывает отфильтрованные данные посредством одной или более комбинационных матриц, чтобы комбинировать своевременные компоненты сигнала для множества передаваемых сигналов. Для MIMO-CDM-передачи для всех кодов разделения на каналы может использоваться один входной фильтр, и для каждого кода разделения на каналы может использоваться отдельная комбинационная матрица. Разделение выполняемой приемником обработки на множество каскадов упрощает выведение входного фильтра и комбинирующих матриц, вместе с тем обеспечивая хорошие рабочие характеристики. Входной фильтр и комбинирующие матрицы могут обновляться по отдельности с одинаковой или различной частотой. 6 н. и 34 з.п. ф-лы, 5 ил.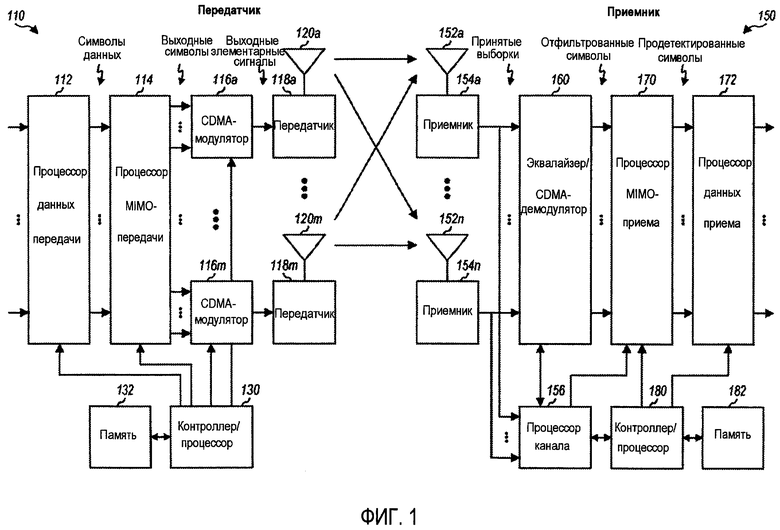
1. Устройство для приема сигнала, содержащее
по меньшей мере, один процессор, предназначенный для фильтрации принятых данных, чтобы обрабатывать несвоевременные компоненты сигнала во множестве принятых сигналов и получать отфильтрованные данные, и чтобы обрабатывать отфильтрованные данные, чтобы комбинировать своевременные компоненты сигнала для множества переданных сигналов; и
память, связанную с, по меньшей мере, одним процессором.
2. Устройство по п.1, в котором, по меньшей мере, один процессор фильтрует принятые данные для более чем одного периода символа, чтобы обрабатывать несвоевременные компоненты сигнала, и обрабатывает отфильтрованные данные для одного периода символа, чтобы комбинировать своевременные компоненты сигнала.
3. Устройство по п.1, в котором, по меньшей мере, один процессор фильтрует принятые данные во временной области.
4. Устройство по п.1, в котором, по меньшей мере, один процессор выводит входной фильтр для обработки несвоевременных компонентов сигнала и выводит, по меньшей мере, одну комбинационную матрицу для комбинирования своевременных компонентов сигнала.
5. Устройство по п.4, в котором, по меньшей мере, один процессор выводит входной фильтр на основании принятых данных для пилот-сигнала и выводит, по меньшей мере, одну комбинационную матрицу на основании, по меньшей мере, одной матрицы передачи, используемой для передачи данных во множестве передаваемых сигналов.
6. Устройство по п.1, в котором, по меньшей мере, один процессор выводит входной фильтр для обработки несвоевременных компонентов сигнала и выводит множество комбинационных матриц для комбинирования своевременных компонентов сигнала для множества кодов разделения на каналы, используемых для множества передаваемых сигналов.
7. Устройство по п.6, в котором, по меньшей мере, один процессор фильтрует принятые данные посредством входного фильтра и обрабатывает отфильтрованные данные посредством множества комбинационных матриц, чтобы получать выходные данные для множества кодов разделения на каналы.
8. Устройство по п.6, в котором, по меньшей мере, один процессор фильтрует принятые данные посредством входного фильтра, чтобы получить промежуточные данные, сжимает промежуточные данные для каждого из множества кодов разделения на каналы, чтобы получать отфильтрованные данные для кода разделения на каналы, и обрабатывает отфильтрованные данные для каждого кода разделения на каналы посредством комбинационной матрицы для кода разделения на каналы, чтобы получать выходные данные для кода разделения на каналы.
9. Устройство по п.6, в котором, по меньшей мере, один процессор сжимает принятые данные для каждого из множества кодов разделения на каналы, чтобы получать сжатые данные для кода разделения на каналы, обрабатывает сжатые данные для каждого кода разделения на каналы посредством входного фильтра, чтобы получать отфильтрованные данные для кода разделения на каналы, и обрабатывает отфильтрованные данные для каждого кода разделения на каналы посредством комбинационной матрицы для кода разделения на каналы, чтобы получать выходные данные для кода разделения на каналы.
10. Устройство по п.6, в котором, по меньшей мере, один процессор выводит входной фильтр на основании принятых данных и известного пилот-сигнала.
11. Устройство по п.6, в котором, по меньшей мере, один процессор выводит входной фильтр на основании выборок для принятых данных и элементарных сигналов известного пилот-сигнала.
12. Устройство по п.6, в котором, по меньшей мере, один процессор сжимает принятые данные посредством кода разделения на каналы пилот-сигнала, чтобы получать сжатые символы пилот-сигнала, и выводит входной фильтр на основании сжатых символов пилот-сигнала и символов известного пилот-сигнала.
13. Устройство по п.6, в котором, по меньшей мере, один процессор выводит входной фильтр на основании критерия наименьших квадратов.
14. Устройство по п.6, в котором, по меньшей мере, один процессор выводит множество комбинационных матриц на основании множества матриц передачи, используемых для множества кодов разделения на каналы.
15. Устройство по п.14, в котором, по меньшей мере, один процессор выводит множество комбинационных матриц дополнительно на основании коэффициентов усиления для множества кодов разделения на каналы.
16. Устройство по п.14, в котором, по меньшей мере, один процессор выводит множество комбинационных матриц дополнительно на основании оценки характеристики канала и входного фильтра.
17. Устройство по п.14, в котором, по меньшей мере, один процессор выводит множество комбинационных матриц на основании критерия минимальной среднеквадратичной ошибки.
18. Устройство по п.6, в котором, по меньшей мере, один процессор выводит комбинационную матрицу для каждого кода разделения на каналы на основании матрицы ковариации шума, входного фильтра, оценки характеристики канала и матрицы передачи для кода разделения на каналы.
19. Устройство по п.6, в котором, по меньшей мере, один процессор выводит матрицу корреляции на основании отфильтрованных данных и выводит комбинационную матрицу для каждого кода разделения на каналы на основании матрицы корреляции, входного фильтра, оценки канала и матрицы передачи для кода разделения на каналы.
20. Устройство по п.6, в котором, по меньшей мере, один процессор обновляет входной фильтр на первой скорости обновления и обновляет множество комбинационных матриц на второй скорости обновления, которая отличается от первой скорости обновления.
21. Устройство по п.1, в котором, по меньшей мере, один процессор выводит входной фильтр на основании пилот-сигнала, принятого в первом временном интервале, выводит комбинационную матрицу для второго временного интервала на основании матрицы передачи, используемой во втором временном интервале, фильтрует принятые данные для второго временного интервала посредством входного фильтра, чтобы получать отфильтрованные данные для второго временного интервала, и обрабатывает отфильтрованные данные посредством комбинационной матрицы.
22. Устройство по п.1, в котором, по меньшей мере, один процессор оценивает качество принятого сигнала для, по меньшей мере, одного сигнала данных, переданного во множестве передаваемых сигналов.
23. Устройство для приема сигнала, содержащее, по меньшей мере, один процессор, предназначенный для того, чтобы выводить входной фильтр для обработки несвоевременных компонентов сигнала во множестве принятых сигналов, чтобы выводить множество комбинирующих матриц для комбинирования своевременных компонентов сигнала для множества переданных сигналов, переданных посредством множества кодов разделения на каналы, чтобы фильтровать принятые выборки посредством входного фильтра и получать отфильтрованные символы для множества кодов разделения на каналы, и чтобы обрабатывать отфильтрованные символы для каждого из множества кодов разделения на каналы посредством комбинационной матрицы для кода разделения на каналы, чтобы получать выходные символы для кода разделения на каналы; и память, связанную с, по меньшей мере, одним процессором.
24. Устройство по п.23, в котором, по меньшей мере, один процессор выводит входной фильтр на основании принятых выборок и элементарных сигналов известного пилот-сигнала.
25. Устройство по п.23, в котором, по меньшей мере, один процессор выводит комбинационную матрицу для каждого кода разделения на каналы на основании матрицы передачи, используемой для кода разделения на каналы.
26. Способ приема сигналов, содержащий
фильтрацию принятых данных для обработки несвоевременных компонентов сигнала во множестве принятых сигналов и получения отфильтрованных данных; и
обработку отфильтрованных данных для комбинирования своевременных компонентов сигнала для множества переданных сигналов.
27. Способ по п.26, дополнительно содержащий
выведение входного фильтра для обработки несвоевременных компонентов сигнала; и
выведение, по меньшей мере, одной комбинационной матрицы для комбинирования своевременных компонентов сигнала.
28. Способ по п.26, дополнительно содержащий
выведение входного фильтра для обработки несвоевременных компонентов сигнала; и
выведение множества комбинационных матриц для комбинирования своевременных компонентов сигнала для множества кодов разделения на каналы, используемых для множества переданных сигналов.
29. Способ по п.28, в котором фильтрация принятых данных включает в себя фильтрацию принятых данных посредством входного фильтра для получения промежуточных данных и сжатие промежуточных данных для каждого из множества кодов разделения на каналы для получения отфильтрованных данных для кода разделения на каналы, и в котором обработка отфильтрованных данных включает в себя обработку отфильтрованных данных для каждого кода разделения на каналы посредством комбинационной матрицы для кода разделения на каналы для получения выходных данных для кода разделения на каналы.
30. Способ по п.28, в котором выведение входного фильтра включает в себя выведение входного фильтра на основании выборок для принятых данных и элементарных сигналов известного пилот-сигнала.
31. Способ по п.28, в котором выведение множества комбинационных матриц включает в себя выведение комбинационной матрицы для каждого из множества кодов разделения на каналы на основании матрицы передачи, используемой для кода разделения на каналы.
32. Устройство для приема сигнала, содержащее
средство для фильтрации принятых данных, чтобы обрабатывать несвоевременные компоненты сигнала во множестве принятых сигналов и получать отфильтрованные данные; и
средство для обработки отфильтрованных данных, чтобы комбинировать своевременные компоненты сигнала для множества переданных сигналов.
33. Устройство по п.32, дополнительно содержащее
средство для выведения входного фильтра для обработки несвоевременных компонентов сигнала; и
средство для выведения множества комбинационных матриц для комбинирования своевременных компонентов сигнала для множества кодов разделения на каналы, используемых для множества переданных сигналов.
34. Устройство по п.33, в котором средство для фильтрации принятых данных содержит средство для фильтрации принятых данных посредством входного фильтра, чтобы получать промежуточные данные, и средство для сжатия промежуточных данных для каждого из множества кодов разделения на каналы, чтобы получать отфильтрованные данные для кода разделения на каналы, и
в котором средство для обработки отфильтрованных данных содержит средство для обработки отфильтрованных данных для каждого кода разделения на каналы посредством комбинационной матрицы для кода разделения на каналы, чтобы получать выходные данные для кода разделения на каналы.
35. Устройство по п.33, в котором средство для выведения входного фильтра содержит средство для выведения входного фильтра на основании выборок для принятых данных и элементарных сигналов известного пилот-сигнала, и в котором средство для выведения множества комбинационных матриц содержит средство для выведения комбинационной матрицы для каждого из множества кодов разделения на каналы на основании матрицы передачи, используемой для кода разделения на каналы.
36. Читаемый процессором носитель для хранения инструкций, выполняемых, чтобы
фильтровать принятые данные, чтобы обрабатывать несвоевременные компоненты сигнала во множестве принятых сигналов и чтобы получать отфильтрованные данные; и
обрабатывать отфильтрованные данные, чтобы комбинировать своевременные компоненты сигнала для множества переданных сигналов.
37. Устройство для приема сигнала, содержащее
по меньшей мере, один процессор, чтобы выполнять обработку для несвоевременных компонентов сигнала во множестве принятых сигналов для получения принятых символов, чтобы выводить комбинационную матрицу для комбинирования своевременных компонентов сигнала для множества сигналов, переданных на поднесущей, и чтобы обрабатывать принятые символы для поднесущей посредством комбинационной матрицы, чтобы получать выходные символы,
память, связанную с, по меньшей мере, одним процессором.
38. Устройство по п.37, в котором, по меньшей мере, один процессор выполняет обработку для несвоевременных компонентов сигнала путем удаления циклического префикса и выполнения быстрого преобразования Фурье принятых выборок, чтобы получать принятые символы.
39. Устройство по п.37, в котором, по меньшей мере, один процессор выводит комбинационную матрицу на основании, по меньшей мере, одного из матрицы ковариации шума, оценки характеристики канала и матрицы передачи для поднесущей.
40. Устройство по п.37, в котором, по меньшей мере, один процессор выводит вторую комбинационную матрицу для комбинирования своевременных компонентов сигнала для множества сигналов, переданных по второй поднесущей, и обрабатывает принятые символы для второй поднесущей посредством второй комбинационной матрицы, чтобы получать выходные символы для второй поднесущей.
| Сани, например, для навоза и торфа | 1953 |
|
SU101595A1 |
| WO 2004075499 A1, 02.09.2004 | |||
| WO 2005099117 A1, 20.10.2005 | |||
| ШТАММ БАКТЕРИЙ LISTERIA MONOCYTOGENES УСХИ-52, ИСПОЛЬЗУЕМЫЙ ДЛЯ ИЗГОТОВЛЕНИЯ ЛИСТЕРИОЗНОЙ ВАКЦИНЫ | 1994 |
|
RU2080379C1 |
| УСТРОЙСТВО МОБИЛЬНОЙ СВЯЗИ С МНОЖЕСТВОМ ПЕРЕДАЮЩИХ И ПРИЕМНЫХ АНТЕНН И СООТВЕТСТВУЮЩИЙ СПОСОБ МОБИЛЬНОЙ СВЯЗИ | 2003 |
|
RU2238611C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДАЧАМИ В СИСТЕМЕ СВЯЗИ | 2001 |
|
RU2264036C2 |
| KR 20050061536 A, 22.06.2005. | |||

