Изобретение относится к машиностроению, в частности к механизмам насосов, компрессоров, поршневых машин, двигателей внутреннего сгорания, а именно к бесшатунным силовым механизмам преобразования возвратно-поступательного движения во вращательное (и наоборот).
Известны устройства бесшатунного механизма преобразования движения (С.С.Баландин «Бесшатунные двигатели внутреннего сгорания» Машиностроение, 1972 г., стр.14, Рис.11а), в котором промежуточное звено ACB выполнено в виде коленчатого вала, совершающего при работе сложное планетарное движение. В механизм, кроме штоков и ползунов с направляющими, также входят кривошипы OC и OC', вращающиеся относительно центральной оси О двигателя. Механизм включает в себя соединительный вал 5, который кинематически объединяет кривошипы OC и OC' и обеспечивает синхронность их вращения. У основных элементов механизма выдерживается равенство, в пределах заданного допуска, следующих характерных размеров: AC=BC=OC=r=1/4S, (где S - величина хода поршня).
Недостатком этого варианта механизма признана повышенная техническая сложность конструкции, обусловленная наличием соединительного вала 5 и синхронизирующих зубчатых колес 3, 4 и 6, 7.
В другом варианте бесшатунного механизма (С.С.Баландин «Бесшатунные двигатели внутреннего сгорания» Машиностроение, 1972 г., стр.14, Рис.11б) соединительный вал отсутствует, а его роль выполняет корпус двигателя, который обеспечивает синхронизацию кривошипов ОС и ОС' через зубчатые пары внутреннего зацепления.
Недостатком этого варианта механизма является значительное усложнение проблемы поддержания в эксплуатации постоянства соосности подшипников кривошипов OC, OC' и соединяющихся с ними шеек коленчатого вала. Кроме того, нагруженность коленчатого вала полным крутящим моментом двигателя и ограниченность радиуса начальной окружности шестерен 8 и 10 (Рис.11б) величиной r, равной одной четверти полного хода поршней, значительно усложняют создание многоцилиндровых короткоходовых двигателей большой мощности, так как диаметры шеек коленчатого вала этих двигателей получаются по условиям прочности намного больше диаметра начальной окружности шестерен 8 и 10.
Задачей изобретения является упрощение бесшатунного механизма путем исключения из его силовой схемы соединительного вала и синхронизирующих шестерен как внешнего, так и внутреннего зацепления.
Задача изобретения решается тем, что передача крутящего момента от коленчатого вала к центральным полувалам осуществлена через поводковые узлы, работающие по принципу синхронного вращения группы параллельных кривошипов.
Полученный технический результат характеризуется следующими существенными признаками:
1. Узел 4 выполнен в виде группы параллельных кривошипов, включающих два или более двух равных звену OC поводков O1C1; O2C2…-…OnCn, расположенных параллельно друг другу и шарнирно закрепленных одним концом на планшайбе 1, принадлежащей балке ABC, а другим концом на планшайбе 2, принадлежащей выходному валу, при этом расположение шарнирных центров поводков O1; O2…On и C1; C2…Cn в плане выбирается таким, чтобы свобода их плоскопараллельного вращения не ограничивалась возможностью взаимного соударения.
2. Планшайба 2, закрепленная на выходном валу, планшайба 1, закрепленная на торце коленчатого вала, и поводки O1C1; O2C2…-…OnCn, входящие в узел параллельных кривошипов, установлены с каждого торца коленчатого вала без его концевых коренных шеек.
На Фиг.1 показана кинематическая схема бесшатунного механизма, поясняющая принцип работы устройства.
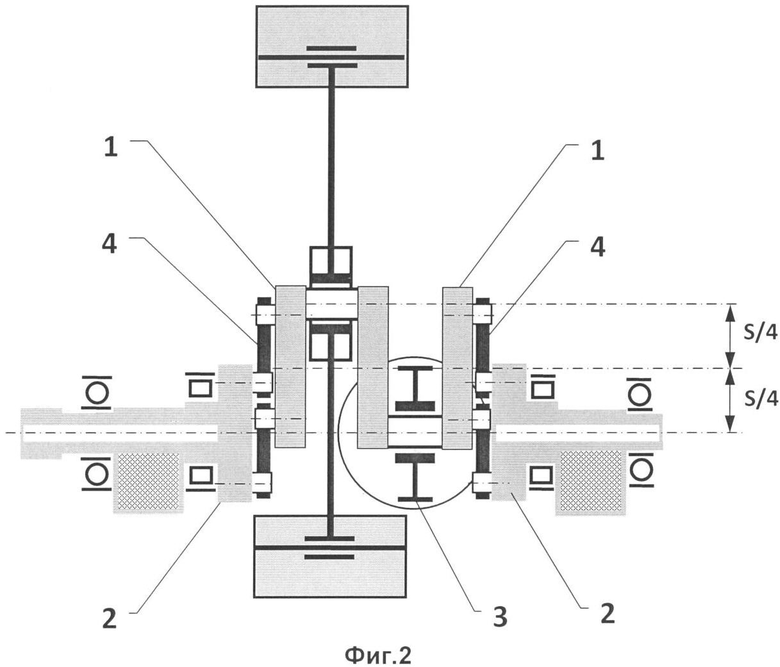
На Фиг.2 показан один из возможных вариантов использования описанной кинематической схемы в поршневых двигателях.
Бесшатунный силовой механизм на Фиг.1 изображен в одном из промежуточных положений и состоит из ползунов A и B, имеющих свободу возвратно-поступательного движения по направляющим 3, балки ACB и звена OC, точка O которого является центром вращения выходного вала двигателя, а точка C - центром вращения балки ACB. Звено OC представлено единым узлом 4 (пунктирный контур) параллельных кривошипов, в который включены два или более двух поводков O1C1; O2C2… …OnCn, равной длины, расположенных параллельно друг другу и шарнирно закрепленных своими концами на планшайбе 1, принадлежащей балке ACB и планшайбе 2, принадлежащей выходному валу. Балка ACB представляет собой проекцию коленчатого вала на перпендикулярную плоскость, а планшайба 1 является его торцевой поверхностью. В свою очередь, планшайба 2 выполнена на торцевой поверхности выходного вала, с которого снимается или которому передается полезная мощность. Узел 4 параллельных кривошипов может быть установлен как с одной, так и с двух сторон описанного бесшатунного механизма преобразования движения.
На Фиг.2 предложенный бесшатунный силовой механизм изображен в одном из возможных вариантов применения в поршневых двигателях. При этом основные элементы механизма, включающие планшайбу 2, закрепленную на выходном валу, планшайбу 1, закрепленную на торце коленчатого вала, и поводки O1C1; O2C2…-…OnCn, входящие в узел параллельных кривошипов, установлены с каждой стороны коленчатого вала, без его концевых коренных шеек.
Бесшатунный силовой механизм работает следующим образом (Фиг.1).
Под действием силы P ползун A движется вниз, разворачивая балку ACB (коленчатый вал) и планшайбу 1 против часовой стрелки с угловой скоростью ω. Поводки O1C1; O2C2… - …OnCn узла параллельных кривошипов 4, поворачиваясь с угловой скоростью -ω, воздействуют на планшайбу 2, передавая ей и, следовательно, выходному валу крутящий момент от силы P и угловую скорость ω. После того как ползун A достигнет центральной точки O, а ползун B окажется в BMT, описанный процесс повторяется под действием силы N и далее непрерывно с заданной угловой скоростью ω.
Поводки узла параллельных кривошипов 4 воспринимают продольные нагрузки от газовых и инерционных сил аналогично кривошипу коленчатого вала и передают их на подшипники выходного вала вместе с полезным крутящим моментом.
Отсутствие необходимости в специальных синхронизирующих элементах значительно упрощает описанный бесшатунный механизм, уменьшает его массу и делает более технологичным в производстве, чем существенно снижает стоимость.
Кроме того, с момента появления первых бесшатунных ДВС конструкции С.С.Баландина не удавалось полностью реализовать заложенный в них потенциал допустимых средних скоростей поршня (20-25 м/с), в два раза превышающий рекомендуемые значения для обычных ДВС (10-12 м/с). Для этого требовался выбор отношения хода поршня S к диаметру цилиндра D в интервале значений S/D=1,6-2,4, чему препятствовал быстрый рост потребных диаметров рабочих поверхностей подшипников.
В рассмотренном бесшатунном механизме данная проблема снята. Все значения S/D из названного интервала могут быть использованы в реальной конструкции с получением минимальных габаритов механизма, так как потребный диаметр пальцев, на которые посажены поводки узла параллельных кривошипов 4, всегда в 2-3 раза меньше диаметра штоковых шеек. Последнее обстоятельство оказывает пропорциональное влияние и на снижение скорости скольжения рабочей поверхности проушины поводка по поверхности пальца.
Предложенное устройство бесшатунного механизма преобразования движения, в котором для передачи крутящего момента от планетарного коленчатого вала, использован узел параллельных кривошипов 4, позволило исключить из его схемы соединительный синхронизирующий вал и синхронизирующие пары шестерен внешнего или внутреннего зацепления, что значительно упростило устройство, уменьшило его массу, улучшило технологичность. Стало возможным с целью полного использования допустимых средних скоростей поршня, выбирать значения отношения хода поршня S к диаметру цилиндра D в интервале больших значений, например S/D=1,6-2,4.
Изобретение относится к области машиностроения, а именно к бесшатунным силовым механизмам преобразования возвратно-поступательного движения во вращательное. Бесшатунный механизм содержит закрепленные в корпусе направляющие для ползунов, ползуны А и В, связанные шарнирно с балкой АСВ, и звено ОС. Звено ОС шарнирно связано с балкой АСВ и вращается вокруг центра О вращения выходного вала двигателя. При этом звено ОС выполнено в виде группы параллельных кривошипов O1C1…OnCn, равных между собой и равных звеньям балки АС и ВС. Указанные кривошипы O1C1…ОnСn закреплены одним концом на планшайбе, принадлежащей балке АСВ, а другим концом на планшайбе, принадлежащей выходному валу двигателя. Решение направлено на упрощение конструкции механизма и улучшение его массогабаритных характеристик. 1 з.п. ф-лы, 2 ил.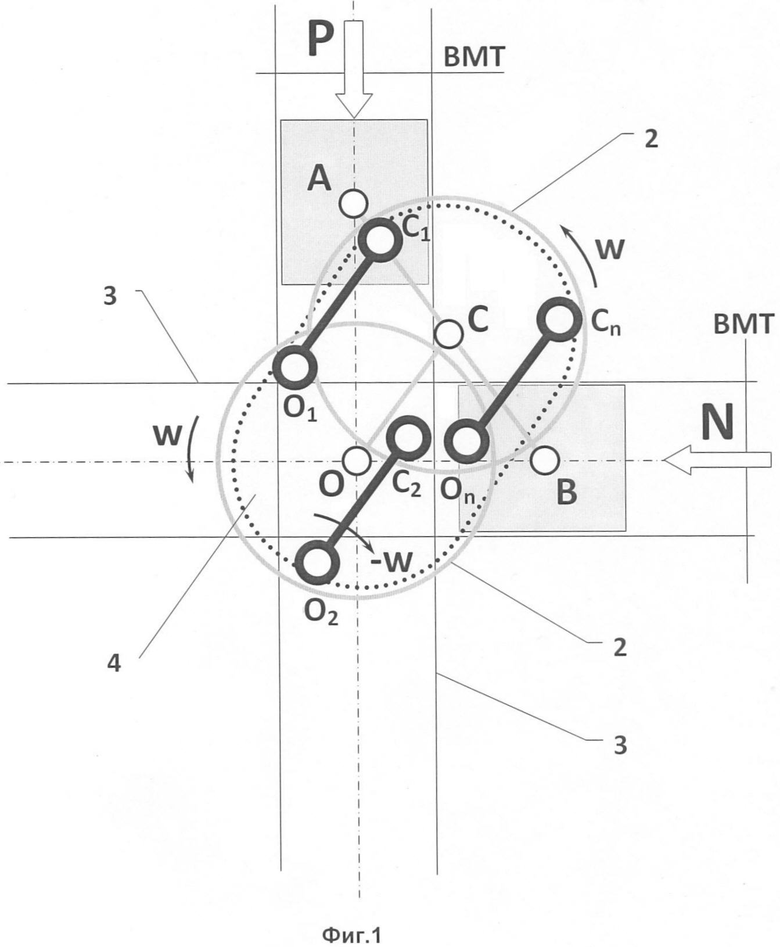
1. Бесшатунный механизм преобразования движения, содержащий закрепленные в корпусе направляющие для ползунов, ползуны А и В, связанные шарнирно с балкой АСВ, звенья которой АС и ВС являются частью балки, равны между собой и равны звену ОС, балка АСВ шарнирно связана с звеном ОС с возможностью вращения вокруг центра С, звено ОС является кривошипом с возможностью вращения вокруг центра О, при этом ползуны А и В имеют свободу перемещения по осям, пересекающим центр вращения О, отличающийся тем, что узел 4 выполнен в виде группы параллельных кривошипов, включающих два или более двух равных звену ОС поводков O1C1; O2C2…-…OnCn, расположенных параллельно друг другу и шарнирно закрепленных одним концом на планшайбе 1, принадлежащей балке АСВ, а другим концом на планшайбе 2, принадлежащей выходному валу, при этом расположение шарнирных центров поводков O1; О2…Оn и C1; C2…Сn в плане выбирается таким, чтобы свобода их вращения не ограничивалась возможностью взаимного соударения.
2. Бесшатунный механизм преобразования движения по п.1, отличающийся тем, что планшайба 2, закрепленная на выходном валу, планшайба 1, закрепленная на торце коленчатого вала, и поводки O1C1; O2C2…-…OnCn, входящие в узел параллельных кривошипов 4, установлены с каждого торца коленчатого вала без его концевых коренных шеек.
| Баландин С.С | |||
| Бесшатунные двигатели внутреннего сгорания | |||
| - Машиностроение, 1972, с.14, рис.11а-11в | |||
| ПОРШНЕВАЯ МАШИНА | 1996 |
|
RU2115805C1 |
| DE 3930263 A1, 15.04.1993. | |||

