Изобретение относится к области машиностроения, в частности к механизмам насосов, компрессоров, поршневых машин, а именно к бесшатунным силовым механизмам для преобразования возвратно-поступательного движения входного устройства во вращательное движение исполнительного устройства и наоборот.
Известно (является аналогом) устройство бесшатунного механизма преобразования движения (С.С. Баландин «Бесшатунные двигатели внутреннего сгорания» Машиностроение, 1972 г., стр. 14, рис. 11а), в котором промежуточное звено ABC выполнено в виде коленчатого вала, совершающего при движении сложное планетарное перемещение. В механизм также входят кривошипы ОС и ОС’, вращающиеся вокруг центральной оси О двигателя. Механизм включает в себя соединительный вал 5, который кинематически объединяет кривошипы ОС и ОС’ и обеспечивает синхронность их вращения.
Устройство-аналог имеет ряд преимуществ, но имеет и недостатки. Недостатком этого механизма является повышенная техническая сложность конструкции, обусловленная наличием соединительного вала 5 и синхронизирующих зубчатых колес.
Из известных технических решений наиболее близким по технической сущности к заявленному устройству является бесшатунный механизм преобразования движения, описанный в патенте RU 2420680. Выбираем это техническое решение в качестве прототипа. Механизм содержит закрепленные в корпусе направляющие для ползунов, ползуны А и В, связанные шарнирно с балкой ABC, и звено ОС. Звено ОС шарнирно связано с балкой ABC и движется вокруг центра О вращения выходного вала устройства. При этом звено ОС выполнено в виде группы параллельных кривошипов, равных между собой и равных звеньям балки АС ВС. Указанные кривошипы закреплены одним концом на планшайбе, принадлежащей балке ABC, а другим концом на планшайбе, принадлежащей выходному валу данного устройства.
Недостатком такого бесшатунного механизма преобразования движения является необходимость установки группы из нескольких параллельных кривошипов, связывающих ведущее и ведомое звенья устройства. Это несколько усложняет конструкцию всего устройства в отношении точности выполнения и посадки шарниров кривошипов. Даже небольшой износ посадочных мест шарниров кривошипов приведет к нарушению кинематики самого механизма и выходу его из строя. При этом необходимы будут дополнительные устройства для устранения нежелательных инерционных сил группы параллельных кривошипов.
Задачами изобретения являются упрощение конструкции бесшатунного механизма преобразования движения путем исключения из его силовой схемы группы из нескольких параллельных кривошипов.
Поставленная задача достигается тем, что устройство для преобразования движения имеет два ползуна в виде стержней, движущихся в двух взаимно-перпендикулярных направляющих, расположенных в разъемном корпусе. Ползуны неподвижно закреплены в ведущей планшайбе, которая эксцентрично размещена в ведомой планшайбе и свободно вращается в ней на подшипниках. Ведомая планшайба, выполненная в виде цилиндрической колеса, установлена в разъемном корпусе и передает вращение выходному валу-шестерне.
Изобретение поясняется прилагаемыми чертежами:
фиг. 1 - разрез устройства для преобразования движения;
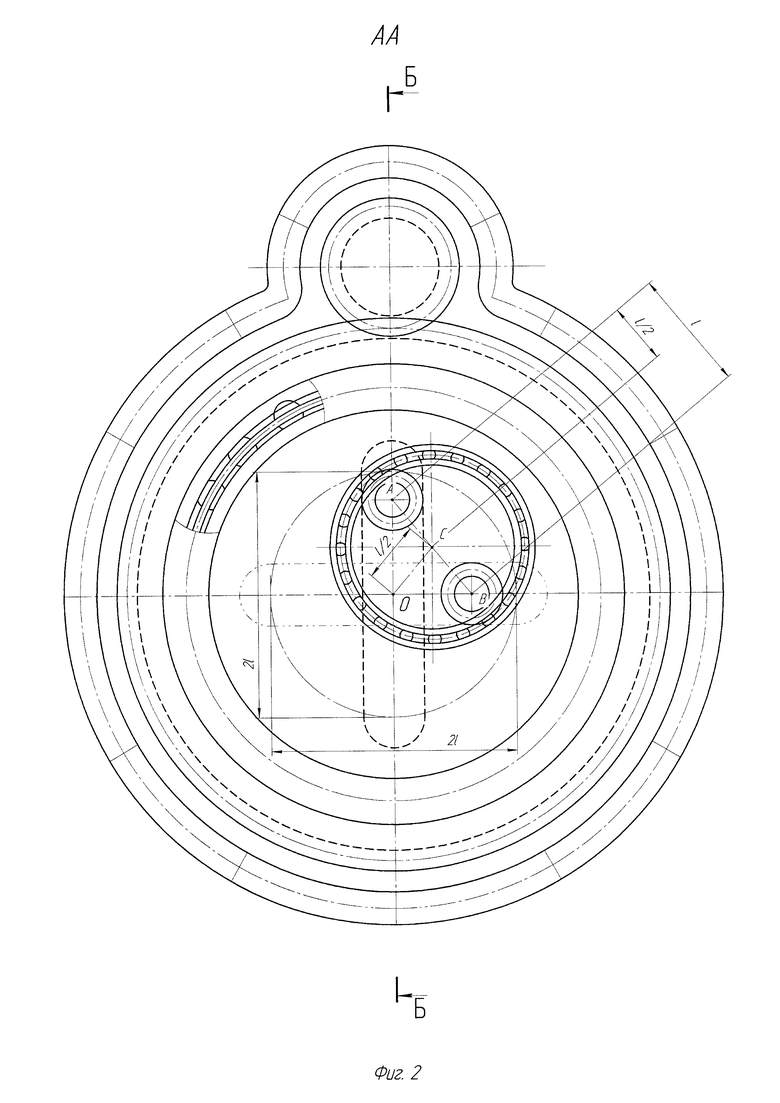
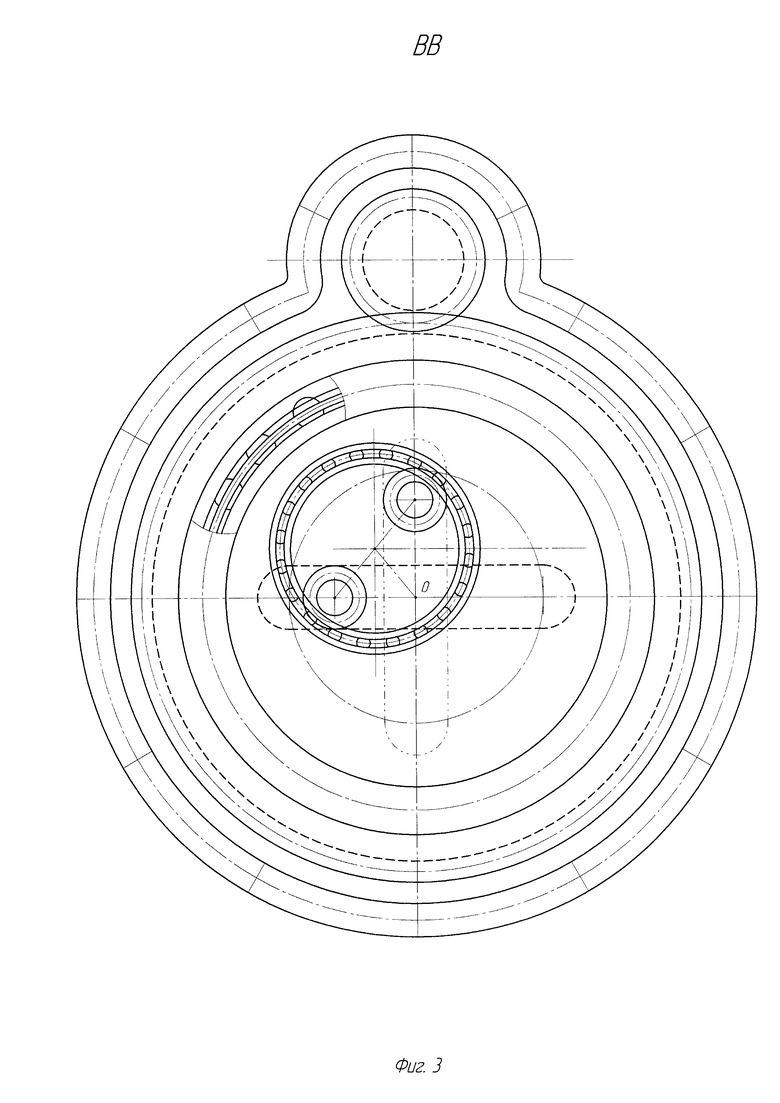
фиг. 2 и фиг. 3 - сечения устройства для преобразования движения с видами на вертикальную и горизонтальную направляющие для ползунов.
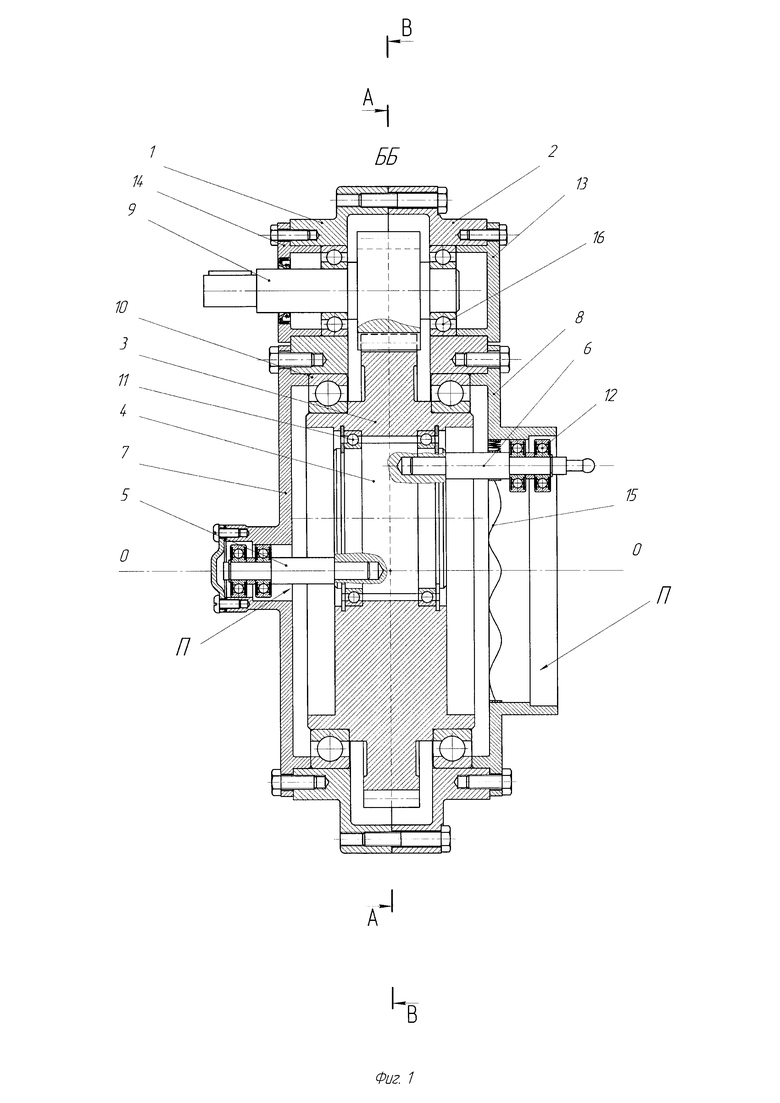
Устройство для преобразования движения (фиг. 1) состоит из разъемного корпуса 1 и 2, в котором на подшипниках 10 установлена ведомая планшайба 3, выполненная в виде цилиндрического колеса, ось вращения которого ОО. В крышках 7 и 8 расположены два взаимно перпендикулярных направляющих паза П. В ведомой планшайбе 3 выполнено цилиндрическое отверстие с эксцентриситетом ОС (фиг. 2, 3). В отверстии на подшипниках 11 установлена ведущая планшайба 4, ось вращения которой проходит через точку С (фиг. 2). В ведущей планшайбе 4 в точках А и В, расположенных на одном диаметре с межосевым расстоянием l и симметричных центру С (фиг. 2), закреплены два ползуна 5 и 6 с подшипниками 12. Оба ползуна одновременно находятся в соответствующих пазах крышек 7 и 8. При этом эксцентриситет ОС планшайбы 4 равен половине межосевого расстояния ползунов (ОС=АС=СВ=l/2), что составляет 1/4 всего хода ползуна. Для соединения механизма преобразования движения с внешним устройством ведомая планшайба 3 находится в зацеплении с валом-шестерней 9, установленным в составном корпусе 1 и 2 на подшипниках 16 с крышками 13 и 14. Уплотнительное устройство 15 служит для предотвращения вытекания масла и защиты механизма от проникновения грязи.
Бесшатунный механизм преобразования движения работает следующим образом. При перемещении ползуна 6 вниз сила, действующая на ведущую планшайбу 4 и осуществляющая ее перемещение, раскладывается на три составляющие: две боковые, действующие со стороны образующих паза П на подшипники 12, и реакцию неподвижного цилиндрического шарнира, образованного подшипниками 10. Сила, противоположная этой реакции и действующая на ведомую планшайбу 3, вызывает ее перемещение, а именно вращение, по ходу часовой стрелки, так как ведущая и ведомая планшайбы образуют клиновой узел и ведущая планшайба 4 вытесняет ведомую планшайбу 3. При ведущем движении планшайбы 3 (против часовой стрелки) клин, образованный этими планшайбами, вызывает вращение планшайбы 4 по часовой стрелке и движение ползуна 6 вверх.
Изобретение может быть осуществлено при использовании отечественного станочного оборудования.
Источник информации
Баландин С.С. Бесшатунные двигатели внутреннего сгорания. М.: Машиностроение, 1972 г., стр. 14, рис. 11а.
Изобретение относится к области машиностроения, а более конкретно - к механизмам для преобразования возвратно-поступательного движения во вращательное и наоборот. Устройство для преобразования возвратно-поступательного движения во вращательное движения имеет два ползуна (5) и (6), движущихся в двух взаимно-перпендикулярных направляющих пазах “П”, расположенных в разъемном корпусе (1, 2). Ползуны неподвижно закреплены в ведущей планшайбе (4), которая помещена с эксцентриситетом в ведомую планшайбу (3) и свободно вращается в ней. Ведомая планшайба (3), выполненная в виде цилиндрического колеса, помещена в разъемном корпусе и передает вращение выходному валу-шестерне (9). Достигается упрощение конструкции. 2 ил.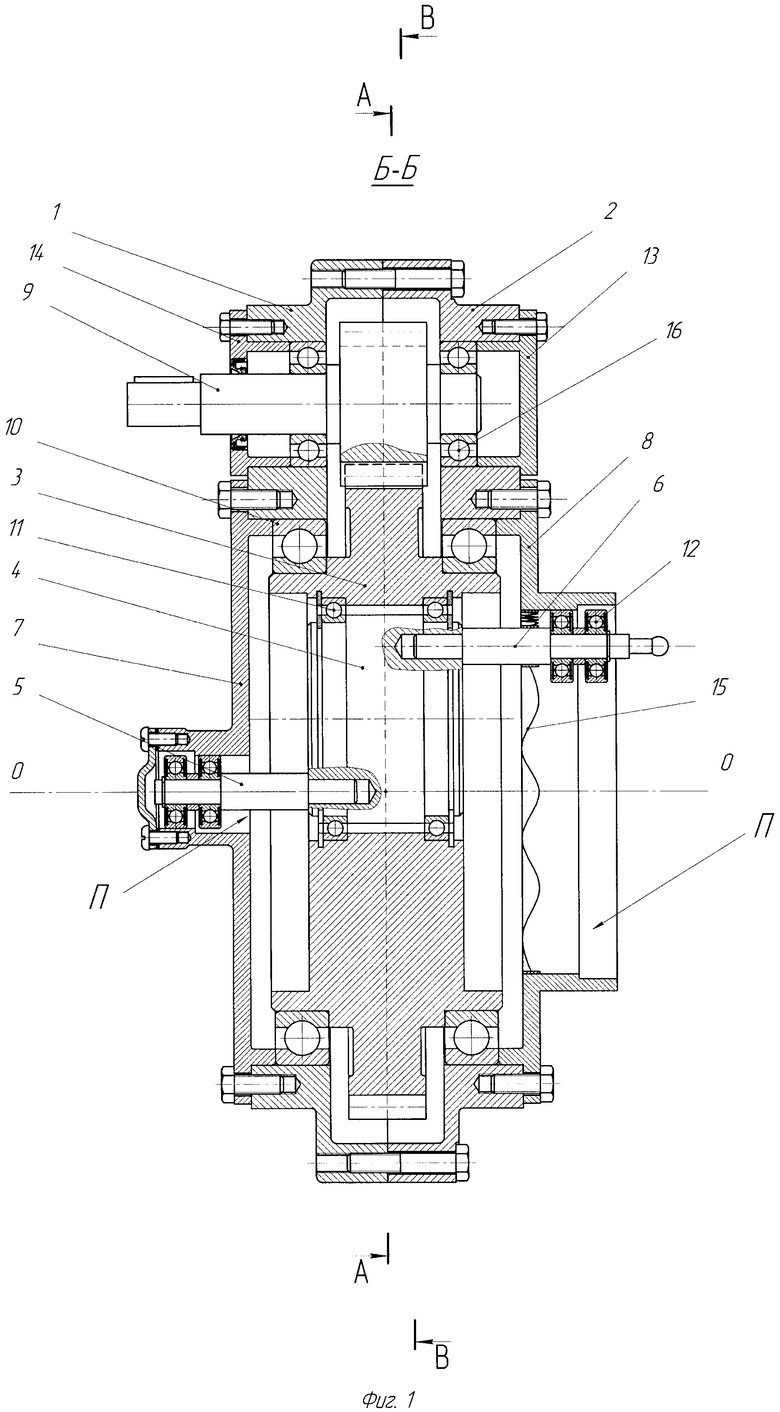
Устройство для преобразования возвратно-поступательного движения во вращательное, содержащее закрепленные на корпусе взаимно перпендикулярные направляющие для двух ползунов, расстояние между которыми составляет половину полного хода каждого ползуна, ведущую планшайбу, ведомую планшайбу, с возможностью вращения ее в корпусе, отличающееся тем, что в ведомую планшайбу, выполненную в виде цилиндрического зубчатого колеса, установлена на подшипниках ведущая планшайба с закрепленными в ней на одном диаметре, симметрично центру ее вращения, двумя ползунами, расположенными по обе стороны ведущей планшайбы и имеющими плоскости перемещения своих осей взаимно перпендикулярными, а линию пересечения этих плоскостей - совпадающей с осью вращения ведомой планшайбы, при этом смещенная ось вращения ведущей планшайбы параллельна ведомой и ее эксцентриситет составляет четверть полного хода ползуна, а выходной вал-шестерня находится в зацеплении с ведомой планшайбой.
| Эксцентриковый кривошипно-ползунный механизм | 1986 |
|
SU1379532A2 |
| Артоболевский И.И | |||
| "Механизмы в современной технике", 2-е изд., переработанное | |||
| т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| US 5762480 A1, 09.06.1998 | |||
| Артоболевский И.И | |||
| "Механизмы в современной технике", 2-е изд., переработанное | |||
| т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Эксцентриковый механизм Митрофанова А.А. | 1986 |
|
SU1573271A1 |
| БЕСШАТУННЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ ПОРШНЕВОЙ МАШИНЫ | 1995 |
|
RU2107204C1 |

