Изобретение относится к области двигателестроения, компрессоростроения, а именно к устройствам преобразования вращательного движения в возвратно-поступательное (и наоборот).
Известны устройства преобразования вращательного движения в возвратно-поступательное, содержащие:
- традиционный кривошипно-шатунный механизм (КШМ);
- бесшатунный силовой механизм (БСМ) С.С.Баландина в варианте без направляющих ползунов (См. С.С.Баландин. «Бесшатунные двигатели внутреннего сгорания». М.: Машиностроение, 1972. Рис.11, Стр.14, Рис.12, Стр.17), который включает: корпус с закрепленными в картере большими цилиндрическими шестернями внутреннего зацепления. Составной коленчатый вал с опорными и штоковыми шейками. Малые цилиндрические шестерни, вращающиеся вокруг оси опорных шеек коленчатого вала вместе со штоковыми шейками и имеющими радиус делительной окружности, равным одной четверти хода поршней. Штоки, подвижно соединенные с коленчатым валом через штоковые шейки;
- бесшатунный силовой механизм С.С.Баландина в варианте со спаренными эсцентриками (См. С.С.Баландин. «Бесшатунные двигатели внутреннего сгорания». М.: Машиностроение, 1972. Стр.14, Рис.11в; Стр.55, Рис.54), который включает: корпус с направляющими для штоковых ползунов. Цельный коленчатый вал. Спаренные эксцентрики, установленные на кривошипе коленчатого вала и имеющие на нем свободу вращения. Штоки, подвижно соединенные с коленчатым валом через эксцентрики и имеющие ползуны, опирающиеся на направляющие.
В процессе вращения ведущего вала эксцентрики вместе со штоками и ползунами совершают возвратно-поступательное движение по осям соответствующих цилиндров и одновременно с этим вращаются относительно своих осей с угловой скоростью, равной, но обратной по знаку угловой скорости вращения коленчатого вала.
Описанное устройство имеет ряд серьезных недостатков. Наличие спаренного эксцентрика не позволяет применять механизм для создания или модернизации рядных поршневых двигателей, т.к. для его нормальной работы необходимо определенное значение развала смежных пар цилиндров (чаще всего - 90 градусов). Из-за действия значительных боковых сил требуется наличие в схеме конструктивного элемента - пары ползун-направляющая. Большой диаметр штокового подшипника, обусловленный большим потребным диаметром эксцентрика является причиной предельных значений скорости скольжения его трущейся поверхности, а также увеличения отношения диаметра штокового подшипника к его ширине. Отсутствует возможность введения кинематического регулирования степени сжатия цилиндров, что в настоящее время стало актуальной проблемой развития двигателестроения.
Отмеченные недостатки прототипа с учетом современных требований не позволяют в полной мере реализовать преимущества конструктивной простоты данного типа механизмов и тем самым сужают сферу их применения.
Первой задачей изобретения является получение конструктивной схемы механизма преобразования движения, в которой устранены или существенно ослаблены перечисленные недостатки прототипа компоновочного, конструктивного и кинематического характера.
Второй задачей изобретения является обеспечение в устройстве возможности регулирования степени сжатия, рабочего объема и угла опережения зажигания одновременно.
Первая задача решается тем, что эксцентрик механизма жестко соединен с одной или двумя малыми цилиндрическими шестернями, имеющими свободу вращения на кривошипе цельного коленчатого вала и передающими усилие через внутреннее зацепление с большими цилиндрическими шестернями, закрепленными в картере корпуса.
Кроме того, кривошип коленчатого вала в зоне расположения эксцентрика выполнен меньшего диаметра, чем на остальной части, а величина радиуса между центром эксцентрика и центром кривошипа коленчатого вала может быть меньше величины радиуса между центральной осью коленчатого вала и осью кривошипа.
Вторая задача решается тем, что все большие цилиндрические шестерни снабжены свободой синхронного кругового перемещения в пределах угла регулирования.
Полученный технический результат характеризуется следующими существенными признаками.
По первой задаче:
- в первом варианте эксцентрик жестко соединен с одной малой цилиндрической шестерней, имеющей совместно с эксцентриком свободу вращения на кривошипе коленчатого вала и образующей пару внутреннего зацепления с шестерней большего диаметра, закрепленной в корпусе устройства, причем радиусы делительных окружностей шестерен соотносятся как 1:2, а радиус между центром эксцентрика и центром кривошипа коленчатого вала, радиус между центральной осью коленчатого вала и центром кривошипа, радиус делительной окружности малой шестерни равны между собой;
- во втором варианте по обе стороны эксцентрика жестко закреплены две равные малые цилиндрические шестерни, находящиеся во внутреннем зацеплении с двумя равными и попарно сопряженными цилиндрическими шестернями большого диаметра;
- кривошип коленчатого вала в зоне расположения ширины эксцентрика имеет меньший диаметр, чем его диаметр в зоне расположения ширины шестерни, причем величина меньшего диаметра выбирается минимальной и ограничена только прочностью при передаче суммарного набегающего крутящего момента на коленчатом валу;
- с целью получения достаточного для нормальной работы большего диаметра шейки кривошипа и обеспечения возможности размещения подшипника внутри малой цилиндрической шестерни, отношение хода поршня механизма к его диаметру принимается в пределах S/D=1,15÷1,55;
- величина радиуса между центром эксцентрика и центром кривошипа коленчатого вала может быть меньше величины радиуса между центральной осью коленчатого вала и осью кривошипа, причем предел уменьшения указанного радиуса равен «0», когда устройство превращается в обычный кривошипно-шатунный механизм.
По второй задаче:
- большие шестерни внутреннего зацепления устройства снабжены свободой кругового смещения в пределах окружного угла регулирования λ=0÷90 градусов, при котором, в результате пространственной переориентации эксцентрика в плоскости вращения, возникает возможность одновременного изменения: степени сжатия цилиндра, части его рабочего объема и угла опережения зажигания, или выключения цилиндра из работы при вращающемся коленчатом вале.
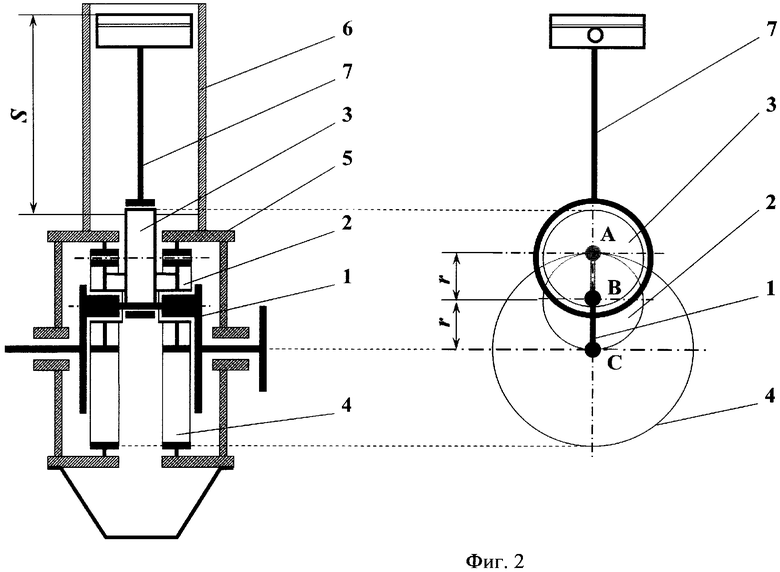
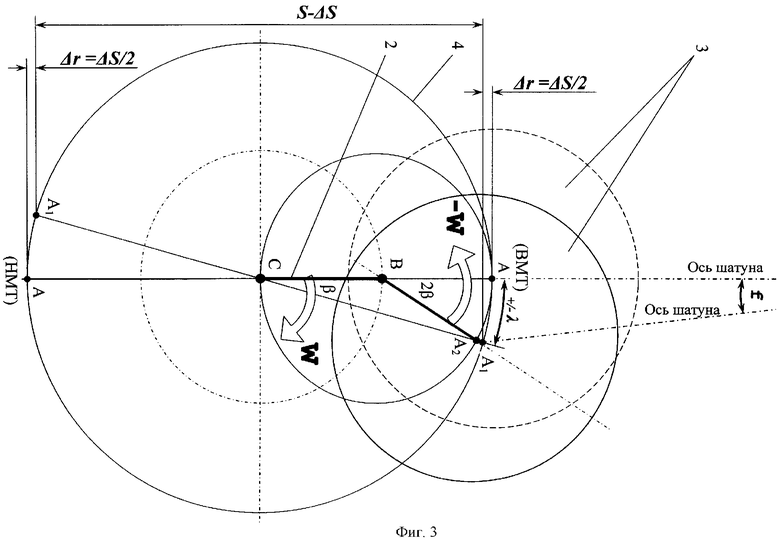
На Фиг.1 показана схема устройства преобразования движения с одной парой зацепления на один кривошип. На Фиг.2 показана схема устройства преобразования движения с двумя парами зацепления на один кривошип. На Фиг.3 приведена принципиальная графическая схема регулирования степени сжатия цилиндра, его рабочего объема и угла опережения зажигания одновременно в пределах рабочего диапазона.
Устройство преобразования движения (Фиг.1, 2) состоит из: корпуса с картером 5; цельного коленчатого вала с кривошипом 1; малой цилиндрической шестерни 2, которая находится в положении внутреннего зацепления с большой цилиндрической шестерней 4 внутреннего зацепления, закрепленной в картере корпуса 5; эксцентрика 3, жестко связанного с малой цилиндрической шестерней 2 и имеющего свободу вращения на кривошипе 1 и в проушине шатуна 7 рабочего цилиндра 6.
Диаметр шейки кривошипа 1 выполнен на участке расположения шестерни 2 большим, а на участке расположения эксцентрика 3 меньшим - минимальным.
Величина радиуса АВ между центром эксцентрика и центром кривошипа коленчатого вала может быть выполнена равной или меньше величины радиуса ВС между центральной осью коленчатого вала и осью кривошипа 1.
В первом варианте (Фиг.1) эксцентрик жестко связан с одной малой цилиндрической шестерней 2, во втором (Фиг.2) - с двумя. Соответственно в первом варианте одна большая цилиндрическая шестерня 4 внутреннего зацепления, во втором - две.
В варианте с изменением степени сжатия цилиндра, его рабочего объема и угла опережения зажигания (Фиг.3) большие цилиндрические шестерни 4 механизма преобразования движения (Фиг.1, 2) снабжены свободой кругового перемещения в пределах угла регулирования λ и, дополнительно, могут иметь свободу кругового перемещения до угла 90 градусов.
Устройство преобразования движения работает следующим образом (Фиг.1, 2).
Работа устройства преобразования движения (например, в двигателе внутреннего сгорания) происходит следующим образом.
Для исходного положения поршня в ВМТ малая цилиндрическая шестерня 2, кривошип 1 и эксцентрик 3 находятся в крайнем верхнем положении, и их межцентровые радиусы СВ и ВА лежат на одной прямой. Пройдя ВМТ (например, в такте расширения), поршень в цилиндре 6 начинает движение вниз. Усилие через шатун 7 передается на эксцентрик 3 и через него на кривошип 1. При этом кривошип 1 вращается по ходу вращения коленчатого вала с угловой скоростью w, а эксцентрик 3 в противоположную сторону со скоростью -w. Равенство абсолютных величин скоростей кривошипа 1 и эксцентрика 3 задается малой цилиндрической шестерней 2, находящейся в постоянном внутреннем зацеплении с большой цилиндрической шестерней 4 при соотношении числа зубьев 1:2. Следовательно, не требуется какой-либо пространственной компоновки в виде развала расположения цилиндров, чтобы обеспечить фазовый сдвиг сил, как это имеет место в конструкции со спаренными кулачками, и исключается потребность в ползунах и направляющих, т.к. реактивный момент передается на корпус картера через зубья шестерен. Это значит, что многомодульные агрегаты (например, многоцилиндровые двигатели) с предлагаемым устройством могут компоноваться по тем же схемам, что и агрегаты с КШМ (например, рядные, V-образные, оппозитные). Возникает, также, возможность без больших капитальных затрат и существенного изменения конструкции проводить модернизацию ранее выпущенных агрегатов.
Если радиус эксцентрика 3 (отрезок АВ), радиус кривошипа 1 (отрезок ВС) и радиус малой цилиндрической шестерни 2 равны между собой, то центр А эксцентрика 3 движется строго по прямой АСА, пересекающей центральную ось коленчатого в точке С. Тогда шатун 7 тоже будет двигаться строго по прямой и может называться штоком (частный случай шатуна). В этом случае, без учета реакций от сил трения, стенки цилиндра 6 не будут испытывать боковых сил от давления газов на поршень. Однако практически в предлагаемом устройстве выгодно задать колебания шатуна в небольших пределах (например, +/- 4 градуса), чтобы уменьшить радиус АВ эксцентрика 3. В таком варианте боковые силы на стенки цилиндра вырастут незначительно, а потребный диаметр эксцентрика 3 уменьшается заметно. Это позволяет уменьшить скорости скольжения на рабочей поверхности эксцентрика 3 и снизить у него отношение диаметра к ширине, что также благотворно влияет на несущую способность масляного слоя.
Вторым конструктивным мероприятием, оказывающим сильное влияние на уменьшение потребного диаметра эксцентрика 3, является предельное уменьшение диаметра шейки кривошипа 1 в зоне расположения ширины эксцентрика 3. Предельное уменьшение диаметра в данном случае означает, что данный участок не несет функции восприятия нагрузки от шатуна и воспринимает только суммарный набегающий крутящий момент, действующий на коленчатом валу. Нагрузка от шатуна симметрично распределяется между двумя участками шейки кривошипа 1 большего диаметра. Причем необходимые значения диаметров этих участков, с учетом размещения малых цилиндрических шестерен 2 и подшипников в них, конструктивно возможно только в длинноходовых устройствах, у которых отношение хода поршня к его диаметру лежит в пределах S/D=1,15÷1,55. Нижний предел ограничен недопустимым снижением значения диаметра участков шейки кривошипа 1 большего размера, верхний - недопустимым ростом диаметра эксцентрика 3.
Введение в устройство зубчатой пары внутреннего зацепления (i=2), жестко связанной с эксцентриком шатуна, создало возможность отказа от пространственной компоновки в виде развала расположения цилиндров и исключило потребность в ползунах и направляющих.
Предельное уменьшение диаметра шейки кривошипа 1 в зоне расположения эксцентрика 3 наряду с введением малой амплитуды колебаний шатуна 7 позволило уменьшить диаметр эксцентрика 3 настолько, что удалось добиться приемлемых условий для компоновки устройства и его нормальной работы.
В варианте с изменением степени сжатия цилиндра, его рабочего объема и угла опережения зажигания (Фиг.3) устройство преобразования движения работает следующим образом.
Устройство реализует выделенные функции, когда большие цилиндрические шестерни установлены в корпусе картера с возможностью синхронного кругового смещения. При этом может быть два принципиально различных случая. В первом случае (I) круговое смещение осуществляется в пределах сравнительно небольшого угла регулирования λ. Во втором случае (II) круговое смещение шестерни от угла λ доводится до больших углов и достигает 90 градусов.
Случай I: Исходное положение устройства на Фиг.3 соответствует моменту, когда центр эксцентрика 3 в процессе вращения коленчатого вала совершает возвратно-поступательное движение вдоль диаметральной прямой АСА. При этом ход поршня равен S, и степень сжатия в цилиндре имеет максимальное значение. С началом кругового перемещение шестерни по ходу регулировочного угла λ до точки А1 происходит пространственная переориентация эксцентрика 3. Его характерный радиус АВ относительно исходного положения радиуса кривошипа ВС поворачивается на угол 2β и занимает новое положение вдоль прямой А2В. В новом положении относительно радиуса кривошипа ВС характерный радиус эксцентрика A2B еще не совпадает с точкой A1. Он достигнет ее только тогда, когда кривошип ВС дополнительно повернется по ходу вращения вала на угол β. В новом положении, в процессе вращения вала, центр эксцентрика будет совершать возвратно-поступательное движение вдоль диаметральной прямой A1CA1, а ход поршня уменьшится на величину ΔS, что приведет и к пропорциональному уменьшению рабочего объема цилиндра. В свою очередь, размер камеры сжатия увеличится на величину ΔS/2. Следовательно, оба фактора по совокупности приведут к снижению степени сжатия рабочего цилиндра. В итоге, каждому новому положению большой цилиндрической шестерни 4 в процессе кругового смещения соответствует свое значение степени сжатия. Пределы изменения степени сжатия задаются при проектировании. Так, например, для двигателя 2103 автомобиля «Жигули» для получения предела изменения степени сжатия Е=14,0÷8,5 достаточно иметь диапазон кругового смещения шестерни от 0 до 20 градусов. Попутное уменьшение рабочего объема цилиндра при этом составит 8,3%.
Как было отмечено выше, круговое смещение шестерни приводит к пространственной переориентации эксцентрика 3 в плоскости вращения, поэтому для каждой новой точки смещения шестерни ВМТ и НМТ достигается при новом положении кривошипа коленчатого вала. Это значит, что пропорционально смещению шестерни изменяется и угол опережения зажигания. С увеличением оборотов двигателя по программе регулирования увеличивают смещение λ, при этом снижается степень сжатия в цилиндре и, одновременно, растет угол опережения зажигания. Смещение шестерни 4, например, на 20 градусов приведет к росту угла опережения зажигания на те же 20 градусов. Это больше, чем требуется практически для оптимизации процесса сгорания, поэтому роль обычных регуляторов угла опережения зажигания сохраняется, но их характеристика корректируется с учетом изложенных особенностей.
Случай II: Когда круговое смещение шестерни доводится до углов больше предела регулирования λ и достигает 90 градусов. В этом диапазоне смещения шестерни быстро уменьшается рабочий объем цилиндра, и при достижении смещения в 90 градусов цилиндр практически выключается из работы. Этот участок может быть использован в устройствах компрессорных машин с регулируемой производительностью или в ДВС для симметричного выключения части рабочих цилиндров из работы при вращающемся коленчатом вале.
Установка больших цилиндрических шестерен в корпусе картера с возможностью синхронного кругового смещения позволила осуществить достаточно простой принцип регулирования степени сжатия цилиндра, части рабочего объема и угла опережения зажигания одновременно в пределах угла λ. Расширение диапазона кругового смещения до угла 90 градусов обеспечило возможность дальнейшего уменьшения рабочего объема цилиндра вплоть до выключения его из работы при вращающемся коленчатом вале.
Изобретение относится к машиностроению, в частности к устройствам преобразования вращательного движения поршневых машин. Технический результат заключается в повышении эффективности работы поршневой машины. Сущность изобретения заключается в том, что устройство содержит коленчатый вал, эксцентрик и зубчатую пару внутреннего зацепления. Эксцентрик жестко соединен с малой цилиндрической шестерней, образующей пару внутреннего зацепления с шестерней с в два раза большим диаметром. При этом величина радиуса между центром эксцентрика и центром кривошипа коленчатого вала может быть меньше величины радиуса между центральной осью коленчатого вала и осью кривошипа. Для изменения степени сжатия цилиндра, его рабочего объема и угла опережения зажигания шестерни большего диаметра снабжены свободой кругового перемещения в пределах угла регулирования λ. При λ=90° рабочий объем цилиндра изменяется вплоть до его выключения из работы при вращающемся вале. 3 з.п. ф-лы, 3 ил.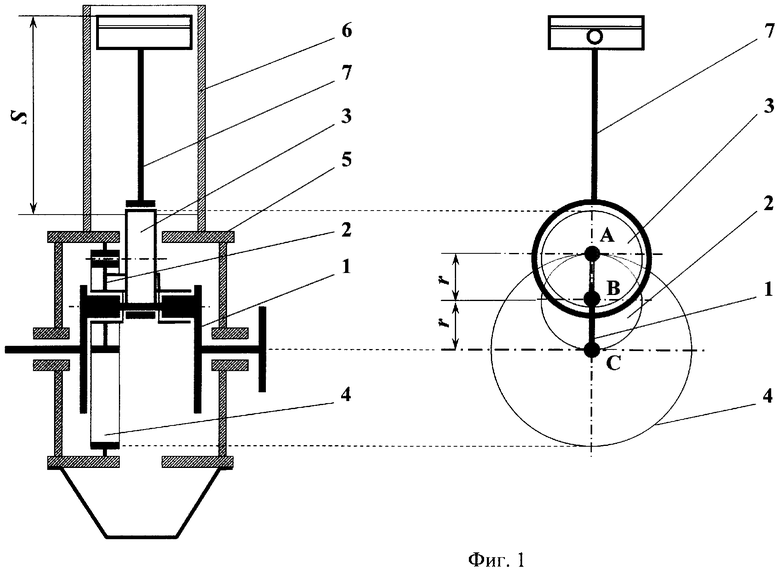
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С БЕСШАТУННЫМ МЕХАНИЗМОМ | 2001 |
|
RU2222705C2 |
| БЕЗДАТЧИКОВАЯ СИСТЕМА БЕЗОПАСНОСТИ ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩЕНИЯ БАРАБАНА ДЛЯ БЕЛЬЯ БЫТОВОГО ЭЛЕКТРОПРИБОРА С ПРИВОДОМ ОТ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2519908C2 |
| AU 2003270961 B1, 17.12.2003 | |||
| ПОРШНЕВАЯ МАШИНА | 1981 |
|
SU1091649A1 |
| RU 2064048 C1, 20.07.1996 | |||
| Лесозаготовительная машина | 1980 |
|
SU933499A1 |
| DE 3927535 A1, 14.03.1991 | |||
| DE 4035139 A1, 07.05.1992. | |||

