Область техники
Настоящее изобретение относится к навигационному устройству для предоставления предупреждений, когда приближается точка обнаружения скоростной ловушки. Изобретение дополнительно относится к транспортному средству, содержащему навигационное устройство, и способу предоставления предупреждений, когда приближается точка обнаружения скоростной ловушки. Также настоящее изобретение относится к компьютерной программе и носителю данных.
Уровень техники
Навигационные устройства предшествующего уровня техники, построенные на базе GPS (глобальной системы позиционирования), хорошо известны и широко используются в качестве автомобильных навигационных систем. Такое навигационное устройство, построенное на базе GPS, относится к вычислительному устройству, которое в функциональном соединении с внешним (внутренним) GPS-приемником способно определять собственную глобальную позицию. Кроме того, вычислительное устройство способно определять маршрут между начальным и конечным адресами, которые могут быть введены пользователем вычислительного устройства. В типичном варианте, вычислительное устройство способно посредством программного обеспечения вычислять "наилучший" или "оптимальный" маршрут между местоположениями начального и конечного адресов из картографической базы данных. "Наилучший" или "оптимальный" маршрут определяется на основе предварительно определенных критериев и не обязательно является самым быстрым или самым коротким маршрутом.
Навигационное устройство может, в типичном варианте, быть прикреплено на приборную доску транспортного средства, а также может быть реализовано как часть бортового компьютера транспортного средства или автомобильной аудиосистемы. Навигационное устройство также может быть (частью) носимой системой, например, PDA или телефоном.
Используя позиционную информацию, получаемую от GPS-приемника, вычислительное устройство может определять на регулярной основе собственную позицию и может отображать текущую позицию транспортного средства пользователю. Навигационное устройство может содержать блоки памяти для хранения картографических данных и дисплей для отображения выбранной части картографических данных.
Кроме того, оно может предоставлять инструкции, как следовать определенному маршруту посредством соответствующих навигационных указаний, отображаемых на дисплее и/или формируемых в качестве звуковых сигналов из динамиков (например, "поверните налево через 100 метров"). Графика, изображающая действия, которые должны быть выполнены (например, стрелка влево указывает поворот налево впереди), может быть отображена в строке состояния, а также может быть самостоятельно наложена на соответствующие развязки дорог/повороты и т.п. на карте.
Хорошо известна способность автомобильных навигационных систем предоставлять возможность водителю, когда он ведет автомобиль вдоль маршрута, вычисленного навигационной системой, инициировать повторное вычисление маршрута. Это полезно, когда на пути автомобиля встречаются дорожные работы или большой автомобильный затор.
Также хорошо известна способность предоставлять возможность пользователю выбирать тип алгоритма вычисления маршрута, применяемого навигационной системой, путем выбора, например, "нормального" режима и "быстрого" режима (который вычисляет маршрут в кратчайшее время, но не исследует множество альтернативных маршрутов как в нормальном режиме).
Также хорошо известна возможность предоставления вычисления маршрута с заданными пользователем критериями, например, пользователь может предпочесть обзорный маршрут, который должен быть вычислен устройством. Программное обеспечение устройства затем вычисляет различные маршруты и оценивает наиболее предпочтительные из них, которые содержат вдоль маршрута наибольшее число точек интереса (известные как POI), которые отмечены, например, как являющиеся живописной архитектурой.
Согласно EP 1266238 известны навигационные устройства, содержащие систему обнаружения и предупреждения о скоростной ловушке, выполненную с возможностью предупреждать водителя об опасностях, в том числе о скоростной ловушке. Такое навигационное устройство может содержать средство хранения, выполненное с возможностью хранить данные о местоположении, определяющие местоположения множества скоростных ловушек. Текущая позиция навигационного устройства сравнивается с этими местоположениями, и, в зависимости от результата, пользователь может быть предупрежден. Такие скоростные ловушки могут, например, быть двухточечными скоростными ловушками (скоростной ловушкой на отрезке дороги).
Целью изобретения является предоставление улучшенной системы предупреждения о скоростной ловушке.
Краткое описание
Согласно аспекту предоставлено навигационное устройство для предоставления предупреждений, когда приближается точка обнаружения скоростной ловушки, содержащее процессор и блок памяти, процессор выполнен с возможностью связываться с блоком памяти и принимать позиционную информацию от устройства позиционирования, блок памяти выполнен с возможностью содержать базу данных скоростных ловушек, содержащую, по меньшей мере, одну точку обнаружения местоположения скоростных ловушек, при этом навигационное устройство дополнительно выполнено с возможностью предоставлять предупреждение, когда приближается одна, по меньшей мере, из одной точки обнаружения, характеризующееся тем, что блок памяти дополнительно выполнен с возможностью содержания, по меньшей мере, дополнительной точки обнаружения, ассоциативно связанной, по меньшей мере, с одной из сохраненных точек обнаружения, дополнительная точка обнаружения и ассоциативно связанная точка обнаружения, обе, относятся к одной и той же скоростной ловушке, при этом навигационное устройство дополнительно выполнено с возможностью предоставлять предупреждение, когда приближается или пройдена дополнительная точка обнаружения. Такое навигационное устройство обеспечивает пользователя точной информацией о двухточечных скоростных ловушках.
Согласно варианту осуществления навигационное устройство выполнено с возможностью
- предоставлять предупреждение, которое является общим предупреждением о скоростной ловушке при приближении к точке обнаружения, в случае, когда нет никакой дополнительной точки обнаружения, ассоциативно связанной с точкой обнаружения, которая приближается,
- предоставлять предупреждение, которое является первым предупреждением об области двухточечного контроля, в случае, когда дополнительная точка обнаружения ассоциативно связана с точкой обнаружения, которая приближается, и
- предоставлять предупреждение, которое является вторым предупреждением об области двухточечного контроля в случае, когда приближается или пройдена дополнительная точка обнаружения. Согласно такому варианту осуществления навигационное устройство предоставляет разные предупреждения для разных ситуаций, что полезно для пользователя.
Согласно варианту осуществления навигационное устройство содержит дисплей, и предупреждение может быть визуальным предупреждением, предоставленным через дисплей, или навигационное устройство содержит динамик, и предупреждение может быть звуковым предупреждением, предоставленным через динамик, или предупреждение может быть комбинацией визуального и звукового предупреждения.
Согласно варианту осуществления навигационное устройство выполнено с возможностью предоставлять предупреждения о превышении скорости между точкой обнаружения и дополнительной точкой обнаружения, если навигационное устройство обнаруживает, что скорость навигационного устройства превышает пороговое значение скорости, пороговое значение скорости хранится в блоке памяти и ассоциативно связано с отрезком дороги между точкой обнаружения и дополнительной точкой обнаружения. Такое навигационное устройство предоставляет дополнительную информацию пользователю, информирующую пользователя о возможном нарушении применимого ограничения скорости. Скорость может быть определена на основе принятой позиционной информации от устройства позиционирования.
Согласно варианту осуществления навигационное устройство выполнено с возможностью предоставлять предупреждение о превышении скорости, если текущая скорость навигационного устройства превышает пороговое значение скорости, или может быть выполнено с возможностью предоставлять предупреждение о превышении скорости, если средняя скорость навигационного устройства превышает пороговое значение скорости. Средняя скорость может быть вычислена от первой точки обнаружения до текущей позиции.
Согласно варианту осуществления навигационное устройство выполнено с возможностью вычислять рекомендованную скорость. Эта рекомендованная скорость может советовать пользователю с какой скоростью следовать, чтобы предотвратить слишком быстрое покидание области, контролируемой двухточечной скоростной ловушкой.
Согласно дополнительному аспекту предоставлено транспортное средство, содержащее навигационное устройство согласно описанному выше.
Согласно дополнительному аспекту предоставлен способ предоставления предупреждений, когда приближается точка обнаружения скоростной ловушки, способ содержит:
- предоставление базы данных скоростных ловушек, содержащей, по меньшей мере, одну точку обнаружения местоположения скоростной ловушки,
- предоставление предупреждения, когда приближается одна, по меньшей мере, из одной точки обнаружения,
характеризующийся
- предоставлением, по меньшей мере, одной дополнительной точки обнаружения, ассоциативно связанной, по меньшей мере, с одной из сохраненных точек обнаружения, дополнительная точка обнаружения и ассоциативно связанная точка обнаружения относятся к одной и той же скоростной ловушке,
- предоставлением предупреждения, когда приближается или пройдена дополнительная точка обнаружения.
Согласно дополнительному аспекту предоставлена вычислительная программа, которая, когда загружена в вычислительно устройство, дает возможность выполнять способ, описанный выше.
Согласно дополнительному аспекту предоставлен носитель данных, содержащий вычислительную программу согласно вычислительной программе, описанной выше.
Краткое описание чертежей
Варианты осуществления настоящего изобретения будут описаны, только в качестве примера, со ссылкой на сопроводительные схематические чертежи, в которых соответствующие ссылочные символы указывают соответствующие части, и на которых:
фиг.1 схематически представляет схематическую блок-схему навигационного устройства;
фиг.2 схематически изображает схематический вид навигационного устройства,
фиг.3 схематически изображает двухточечную скоростную ловушку,
фиг.4 схематически изображает последовательность операций согласно варианту осуществления, и
фиг.5 схематически изображает последовательность операций алгоритма согласно варианту осуществления.
Подробное описание
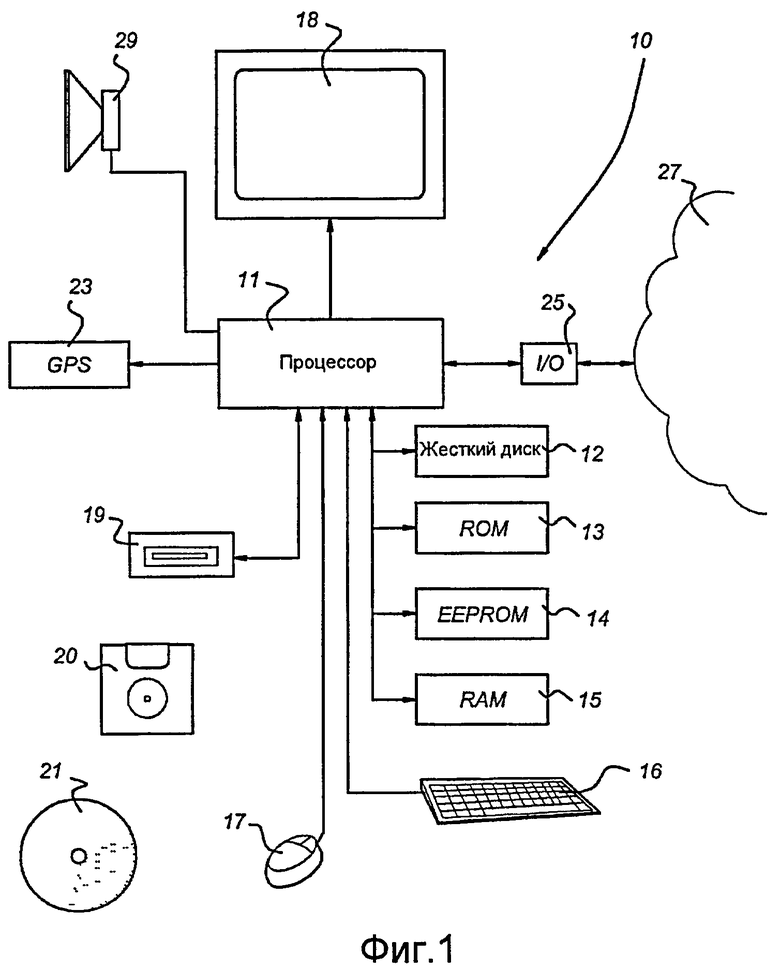
Фиг.1 показывает схематическую блок-схему варианта осуществления навигационного устройства 10, содержащего процессор 11 для выполнения арифметических операций. Процессор 11 выполнен с возможностью соединяться с блоками памяти, которые хранят инструкции и данные, такими как жесткий диск 12, постоянное запоминающее устройство (ROM) 13, электрически стираемое программируемое постоянное запоминающее устройство (EEPROM) 14 и оперативное запоминающее устройство (RAM) 15. Блоки памяти могут содержать картографические данные 22. Эти картографические данные могут быть двумерными картографическими данными (широта и долгота), но также могут содержать третье измерение (высоту). Картографические данные могут дополнительно содержать дополнительную информацию, например, информацию о бензиновых/газовых заправочных станциях, точках интереса. Картографические данные могут также содержать информацию о форме зданий и объектов вдоль дороги.
Процессор 11 также может быть выполнен с возможностью соединяться с одним или более устройств ввода, такими как клавиатура 16 или мышь 17. Клавиатура 16 может, например, быть виртуальной клавиатурой, представленной на дисплее 18, который является экраном чувствительным к прикосновению. Процессор 11 может дополнительно быть выполнен с возможностью связываться с одним или более устройств вывода, таким как дисплей 18, динамик 29, и одним или более блоков 19 считывания для того, чтобы считывать, например, флоппи-диски 20 или CD ROM 21. Дисплей 18 может быть традиционным компьютерным дисплеем (например, ЖК) или может быть дисплеем проекционного типа, таким как расположенный на уровне лобового стекла дисплей, используемый для проецирования инструментальных данных на лобовое стекло или ветровой щиток автомобиля. Дисплей 18 может также быть дисплеем, выполненным с возможностью функционировать как чувствительный к прикосновению экран, что позволяет пользователю вводить инструкции и/или информацию посредством прикосновения к дисплею 18 своим пальцем.
Динамик 29 может быть реализован как часть навигационного устройства 10. В случае, когда навигационное устройство 10 используется как автомобильное навигационное устройство, навигационное устройство 10 может использовать динамики автомобильной аудиосистемы, бортового компьютера или подобное.
Процессор 11 дополнительно может быть выполнен с возможностью связываться с устройством 23 позиционирования, таким как GPS-приемник, которое предоставляет информацию относительно позиции навигационного устройства 10. Согласно этому варианту осуществления устройство 23 позиционирования - это устройство 23 позиционирования, построенное на базе GPS. Тем не менее следует понимать, что навигационное устройство 10 может быть реализовано любым типом технологии определения местоположения и не ограничено GPS. Оно может быть реализовано с помощью других видов GNSS (спутниковая система глобальной навигации), такой как Европейская система Галилео. Также оно не ограничено системами определения положения/скорости на спутниковой основе и также может быть развернуто с помощью наземных маяковых сигналов или любых других видов систем, которые позволяют устройству определять свое географическое положение.
Тем не менее следует понимать, что они могут быть представлены с другими или отличными по количеству блоками памяти, устройствами ввода и устройствами считывания, хорошо известными специалистам в данной области техники. Кроме того, одно или несколько этих устройств могут быть физически расположены удаленно от процессора 11, если потребуется. Процессор 11 показан как один блок, однако, он может содержать несколько процессоров, функционирующих параллельно и управляемых одним главным процессором, который может быть расположен удаленно от других, как хорошо известно специалистам в данной области техники.
Навигационное устройство 10 показано как вычислительная система, но может быть любой системой обработки сигналов с аналоговой и/или цифровой, и/или программной технологией, выполненной с возможностью выполнять функции, описываемые в данном документе. Следует понимать, что, несмотря на то, что навигационное устройство 10 показано на фиг.1 как множество компонентов, навигационное устройство 10 может быть реализовано как единое устройство.
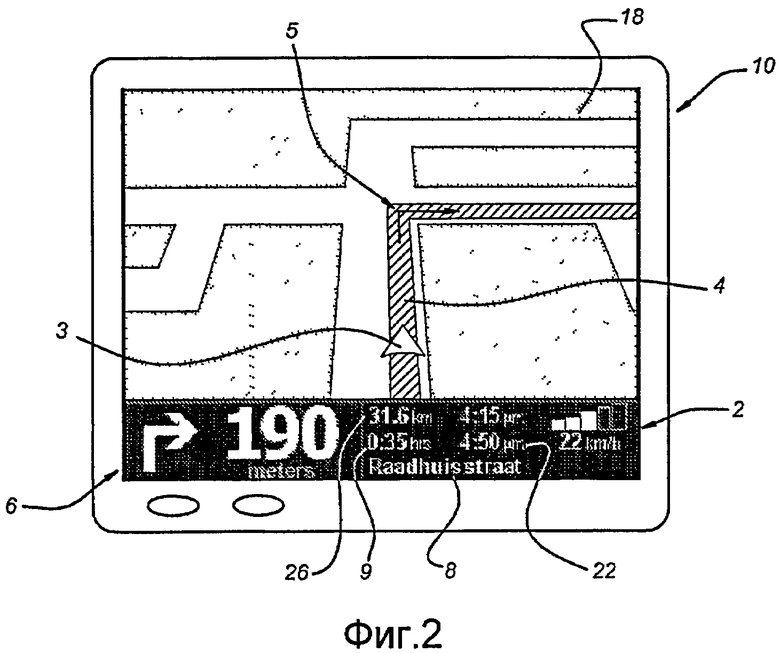
Навигационное устройство 10 может использовать навигационное программное обеспечение, такое как навигационное программное обеспечение от TomTom B.V., называемое Navigator. Программное обеспечение Navigator может работать на Pocket PC PDA-устройстве с сенсорным экраном (т.е. с управлением стилусом), таком как Compaq iPaq, а также на любых других устройствах, которые имеют встроенный GPS-приемник 23. Объединенная система PDA и GPS-приемника разработана для того, чтобы использоваться в навигационной системе в транспортном средстве. Варианты осуществления также могут быть осуществлены в любой другой форме навигационного устройства 10, например, в виде GPS-приемника/компьютера/дисплея, или устройства, сконструированного для использования вне транспортного средства (например, для пешеходов) или в транспортных средствах, отличных от автомобиля (например, в самолетах). Фиг.2 показывает навигационное устройство 10, описанное выше.
Навигационное программное обеспечение, когда запущено в навигационном устройстве 10, отображает экран нормального навигационного режима на дисплее 18, как показано на фиг.2. Этот вид может предоставлять инструкции для управления транспортным средством с помощью комбинации текста, символов, голосовых подсказок и перемещаемой карты. Ключевые элементы пользовательского интерфейса следующие: 3D карта, занимающая большую часть экрана. Отметим, что карта также может быть показана как 2D карта.
Карта показывает позицию навигационного устройства 10 и его непосредственное окружение, вращаемое таким образом, что направление, в котором навигационное устройство 10 перемещается, всегда направлено "вверх". Строка 2 состояния может проходить через экран в нижней четверти экрана. Текущее положение навигационного устройства 10 (которое навигационное устройство определило самостоятельно с помощью традиционного GPS-определения положения) и его ориентация (которое выводится из направления движения) показаны позиционной стрелкой 3. Маршрут 4, вычисленный устройством (с помощью алгоритмов вычисления маршрута, сохраненных в блоках 12, 13, 14, 15 памяти в качестве применяемых к картографическим данным, сохраненным в картографической базе данных в блоках 12-15 памяти), показан как затемненный путь. На маршруте 4, все основные действия (например, закругления поворотов, пересечения дорог, круговые развязки и т.п.) схематически изображены стрелкой 5, наложенной поверх маршрута 4. Строка 2 состояния также включает в себя с левой стороны схематическую иконку, изображающую следующее действие 6 (в данном случае поворот направо). Строка 2 состояния также показывает расстояние до следующего действия 6 (например, поворот направо - здесь расстояние составляет 190 м) как извлеченное из базы данных всего маршрута, вычисленного устройством (т.е. из списка всех дорог и связанных предпринимаемых действий, задаваемых маршрутом). Строка 2 состояния также показывает название текущей дороги 8, оставшееся до конца поездки время 9 (в данном случае 35 минут), актуальное оценочное время 22 прибытия (16:50) и расстояние до места назначения 26 (31,6 км). Строка 2 состояния может дополнительно показывать дополнительную информацию, например, мощность GPS-сигнала в виде индикатора мощности стилем подобно используемому в мобильных телефонах.
Как уже упомянуто выше, навигационное устройство может содержать устройство ввода, такое как чувствительный к прикосновению экран, который позволяет пользователю вызывать навигационное меню (не показано). Из этого меню могут быть инициированы и управляться другие навигационные функции. Разрешение выбора навигационных функций из экрана меню, которые сами по себе очень легко вызываются (например, одним действием от отображения карты до экрана меню) значительно упрощает взаимодействие пользователя и делает его более быстрым и простым. Навигационное меню включает в себя варианты для ввода пользователем места назначения.
Фактическая физическая структура навигационного устройства 10 сама по себе фундаментально может не отличаться от любого традиционного карманного компьютера, за исключением встроенного GPS-приемника 23 или GPS-данных, получаемых от внешнего GPS-приемника. Следовательно, блоки 12-15 памяти хранят алгоритмы вычисления маршрута, картографическую базу данных и программное обеспечение пользовательского интерфейса; процессор 12 интерпретирует и обрабатывает пользовательский ввод (например, с помощью чувствительного к прикосновению экрана) для того, чтобы ввести начальный и конечный адреса и все другие входные команды управления) и применяет алгоритмы вычисления маршрута для того, чтобы вычислить оптимальный маршрут. "Оптимальность" может ссылаться на критерий, например, наименьшее время или наикратчайшее расстояние, или некоторые другие связанные с пользователем факторы.
Более конкретно, пользователь вводит свою начальную позицию и требуемое место назначения в навигационное программное обеспечение, запущенное на навигационном устройстве 10, с помощью предоставленных устройств ввода, таких как чувствительный к прикосновению экран 18, клавиатура 16 и т.п. Пользователь затем выбирает способ, которым будет вычислен маршрут: предлагаются различные режимы, например, "быстрый" режим, который вычисляет маршрут очень быстро, но маршрут может не быть кратчайшим; "полный" режим, который просматривает все возможные маршруты и выделяет кратчайший, но дольше по времени вычисления, и т.п. Возможны другие варианты с заданным пользователем маршрутом, который является живописным, например, проходит через множество POI (точек интереса), которые помечены как виды с живописной архитектурой, или проходят через множество POI возможного интереса для детей или использует наименьшее число пересечений дорог, и т.д.
Навигационное устройство 10 может дополнительно содержать устройство 25 ввода-вывода, которое предоставляет навигационному устройству возможность связываться с удаленными системами, такими как другие навигационные устройства 10, персональные компьютеры, серверы и т.д., через сеть 27. Сеть 27 может быть сетью 27 любого типа, например, LAN, WAN, Bluetooth, Интернет, интранет и т.п. Связь может быть проводной или беспроводной. Беспроводная линия связи может, например, использовать RF-сигналы (радиочастоту) и RF-сеть.
Сами дороги описываются в картографической базе данных, которая является частью навигационного программного обеспечения (или иным образом доступна для него), запущенным на навигационном устройстве 10, как линии, т.е. векторы (например, начальная точка, конечная точка, направление для дороги, полностью дорога составлена из многих сотен таких секций, каждая уникально задана параметрами начальной точки/конечной точки, направления). Карта затем составляется из таких векторов дорог, плюс точки интереса (POI), плюс названия дорог, плюс другие географические элементы, такие как границы парков, границы рек и т.п., все они задаются в терминах векторов. Все картографические элементы (например, векторы дорог, POI и т.п.) задаются в координатной системе, которая соответствует или относится к координатной системе GPS, давая возможность поместить позицию устройства, как определенную через GPS-систему, на соответствующую дорогу, показанную на карте.
Вычисление маршрута использует сложные алгоритмы, которые являются частью навигационного программного обеспечения. Алгоритмы применяются для того, чтобы подсчитать большое количество потенциальных разных маршрутов. Навигационное программное обеспечение затем оценивает их по заданному пользователем критерию (или по настройкам по умолчанию устройства), такому как сканирование в полном режиме, с маршрутом по живописным местам, старинные музеи и без камер измерения скорости. Маршрут, который наилучшим образом соответствует заданным критериям, затем вычисляется процессором 11 и затем сохраняется в базе данных в блоках 12-15 памяти как последовательность векторов, названий дорог и действий, которые необходимо выполнить на конечной точке вектора (например, соответствующих предварительно заданным расстояниям вдоль каждой дороги на маршруте, например, через 100 метров поворот налево на улицу х).
Как уже было упомянуто выше, блоки 12-15 памяти могут содержать картографические данные. Картографические данные могут дополнительно содержать дополнительную информацию, например, информацию о бензиновых/газовых заправочных станциях, точках интереса. Картографические данные могут также содержать информацию о местоположении скоростных ловушек, таких как двухточечные скоростные ловушки.
Двухточечная скоростная ловушка
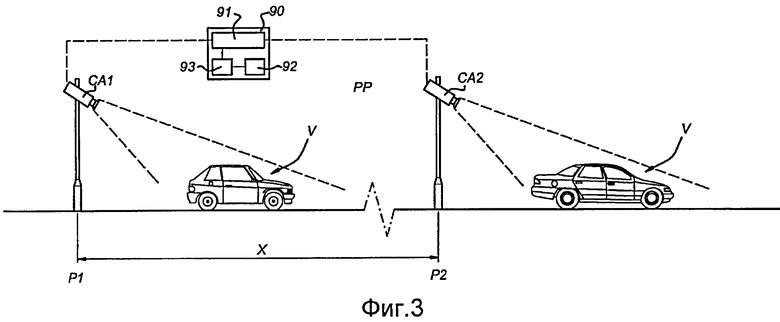
Двухточечная скоростная ловушка PP является скоростной ловушкой, содержащей первую точку P1 обнаружения и вторую точку P2 обнаружения, как схематически изображено на фиг.3. Эти точки также могут называться в этом тексте как точка P1 обнаружения и дополнительная точка P2 обнаружения, соответственно.
Расстояние X между первой точкой P1 обнаружения и второй точкой P2 обнаружения известно, например, 3500 метров. Двухточечная скоростная ловушка PP выполнена с возможностью обнаруживать транспортное средство V, проезжающее мимо первой точки P1 обнаружения. Все виды технологий могут использоваться, чтобы обнаружить транспортное средство V, проезжающее мимо первой точки P1 обнаружения. Транспортное средство V может, например, быть обнаружено с помощью электромагнитных датчиков (не показаны), предусмотренных на дороге. Если транспортное средство V обнаружено, первая камера CA1, помещенная в первой точке P1 обнаружения, вызывается, чтобы изобразить картинку транспортного средства V, например, номерной знак транспортного средства V.
Двухточечная скоростная ловушка PP может дополнительно содержать блок 90 обработки. Блок 90 обработки может быть любым типом вычислительной системы, например, содержащим блок 91 ввода, блок 92 памяти и процессор 93. Процессор 93 выполнен с возможностью связываться с блоком 92 памяти и блоком 91 ввода.
Изображение, полученное первой камерой CA1 в первой точке P1 обнаружения, передается блоку 92 памяти через блок 91 ввода. Изображение, полученное первой камерой CA1, может передаваться блоку 90 обработки с помощью любого вида технологии, такой как простой провод, но также через любой вид сети, например, проводную или беспроводную сеть. Также в блоке 92 памяти сохранено время t1, в которое получено изображение, например, 10 час 30 мин и 23 секунды.
Транспортное средство V обнаруживается похожим образом, когда оно проезжает мимо второй точки P2 обнаружения. Опять, камера CA2, помещенная во второй точке P2 обнаружения, вызывается, чтобы получить изображение транспортного средства. Изображение, полученное во второй точке P2 обнаружения, сохраняется в блоке 92 памяти блока 90 обработки вместе со временем t2, в которое получена картинка, например, 10 час 32 мин и 10 секунд.
Конечно, многие транспортные средства могут проезжать мимо двухточечной скоростной ловушки PP каждую минуту. Следовательно, все изображения, сохраненные в блоке 92 памяти, анализируются, и, например, на основе номерных знаков изображения, показывающие одно и то же транспортное средство в первой и второй точках P1 и P2 обнаружения, группируются вместе.
Далее, процессор 93 вычисляет среднюю скорость транспортного средства V между первой и второй точками P1, P2 обнаружения на основе значений времени t1 и t2 первого и второго изображения, показывающего одно и то же транспортное средство V, и известного расстояния X между первой и второй точкой P1, P2 обнаружения. В этом случае средняя скорость транспортного средства V равна:

так как 10 час 32 мин и 10 секунд минус 10 час 30 мин и 23 секунды равняется 107 секундам. Далее, эта вычисленная vavеrage может быть сравнена с пороговым значением скорости, сохраненным в блоке 92 памяти. Пороговое значение скорости может соответствовать максимальной скорости для отрезка дороги между точкой P1 обнаружения и точкой P2 обнаружения. Например, в случае, когда максимальная скорость для этого участка дороги равна 100 км/ч, пороговое значение скорости может быть 100 км/ч или 103 км/ч. В случае, когда vavеrage > vthreshold, владелец транспортного средства V может быть оштрафован.
Согласно предыдущему уровню техники системы предупреждения о скоростной ловушке предоставляют предупреждение, когда пользователь приближается к скоростной ловушке. Такое предупреждение формируется в случае, когда навигация обнаруживает, что навигационное устройство 10 приближается к скоростной ловушке, местоположения которой сохранены в базе данных, доступной навигационному устройству 10. Большинство скоростных ловушек являются одиночными автономными системами. Для таких автономных скоростных ловушек достаточно предоставлять предупреждение, указывающее, что приближается скоростная ловушка. Водитель может замедлить его/ее транспортное средство и впоследствии не получит штраф или квитанцию.
В двухточечной скоростной ловушке средняя скорость вычисляется между первой и второй точкой P1, P2 обнаружения. Таким образом, если пользователь ускоряет его/ее транспортное средство после проезда точки P1 обнаружения, подобно описанному выше, он/она рискует получить штраф за слишком быструю езду, так как средняя скорость между первой и второй точкой P1, P2 обнаружения была слишком высокой.
Вариант осуществления 1
Согласно варианту осуществления блоки 12-15 памяти навигационного устройства 10 могут быть выполнены с возможностью содержать информацию о позиции двухточечной скоростной ловушки, т.е. информацию о первой точке P1 обнаружения в первом местоположении L1 и второй точке P2 обнаружения во втором местоположении L2. Также может храниться информация, указывающая, что первая и вторая точки P1, P2 обнаружения ассоциативно связаны друг с другом, являясь частью одной и той же скоростной ловушки, т.е. двухточечной скоростной ловушки PP.
Навигационное устройство 10 может быть выполнено с возможностью предоставлять пользователю первое предупреждение или информационный сигнал, когда пользователь приближается к первой точке P1 обнаружения. Предупреждение или информационный сигнал могут сказать пользователю, что он/она въезжает в область, контролируемую двухточечной скоростной ловушкой.
Это первое предупреждение может быть отдельным звуком или произносимым сообщением, воспроизведенным через динамик 29, и/или визуальным предупреждением, таким как иконка, отображаемая на дисплее 18.
Навигационное устройство 10 может дополнительно быть выполнено с возможностью предоставлять пользователю второе предупреждение или информационный сигнал, когда пользователь проехал вторую точку P2 обнаружения. Предупреждение или информационный сигнал могут сказать пользователю, что он/она покинул область, контролируемую двухточечной скоростной ловушкой.
Опять же это второе предупреждение может быть отдельным звуком или произносимым сообщением, воспроизведенным через динамик 29, и/или визуальным предупреждением, таким как иконка, отображаемая на дисплее 18.
Согласно варианту, например, в случае, когда первое предупреждение является, по меньшей мере, визуальным предупреждением, первое предупреждение может воспроизводиться до тех пор, пока навигационное устройство 10 не покинет область, контролируемую скоростной ловушкой. В этом случае второе предупреждение в действительности выдается уже посредством не предоставления первого предупреждения.
Этот признак помогает пользователю избежать получения штрафа или законного взыскания из-за факта того, что он/она не знал, что он/она разогнался в области дороги двухточечного контроля. Также это помогает повысить безопасность дорожного движения в такой зоне, постоянно информируя водителей об этом.
Согласно этому варианту осуществления навигационное устройство 10 предоставляет предупреждение о том, что произошел въезд в область, контролируемую двухточечной скоростной ловушкой и, таким образом, что пользователь не должен разгонять его/ее транспортное средство после проезда первой точки P1 обнаружения.
Посредством сохранения первой точки P1 обнаружения и второй точки P2 обнаружения, пользователю может быть выдана точная информация о местоположении двухточечной скоростной ловушки PP. Пользователю может быть выдано предупреждение, когда приближается двухточечная скоростная ловушка, т.е. когда приближается первая точка P1 двухточечной скоростной ловушки PP, а также когда зона двухточечной скоростной ловушки PP покинута, т.е. когда была пройдена вторая точка P2 обнаружения. На основе этого варианта осуществления пользователь знает точно, находится ли он/она в или вне области, контролируемой двухточечной скоростной ловушкой.
Согласно предшествующему уровню техники, как упомянуто выше, текущие навигационные устройства 10 дают предупреждение, когда пользователь приближается к скоростной ловушке, такой как двухточечная скоростная ловушка. Однако не предоставляется указание о том, какой тип скоростной ловушки приближается, и не выдается предупреждение о том, когда область, контролируемая двухточечной скоростной ловушкой, покинута.
На основе этого варианта осуществления пользователь узнает, что он/она не должен разгонять свое транспортное средство, когда проехал первую точку P1 обнаружения, и что он/она должен подчиняться соответствующему максимальному значению скорости до тех пор, пока он/она не покинет область двухточечного контроля, т.е. когда ему/ей выдается предупреждение или информационный сигнал, информирующий, что область двухточечного контроля была покинута.
На основе этого варианта осуществления блоки 12-15 памяти навигационного устройства 10 могут быть выполнены с возможностью хранить базу данных скоростных ловушек, которая улучшена по сравнению с предшествующим уровнем техники. База данных скоростных ловушек хранит не только первые точки P1 обнаружения с местоположениями скоростных ловушек, но может также хранить вторые точки P2 обнаружения, ассоциативно связанные, по меньшей мере, с одной из сохраненных первых точек P1 обнаружения, указывающие, что первая точка P1 обнаружения ссылается на двухточечную скоростную ловушку, которая заканчивается второй точкой P2 обнаружения.
Блоки 12-15 памяти могут, например, содержать следующую информацию:
Согласно этому примеру база данных скоростных ловушек содержит пять записей. Первая скоростная ловушка расположена в первом местоположении X1, Y1, где Xi и Yi представляют координаты i-ой скоростной ловушки. Следует понимать, что может использоваться множество способов указания местоположения скоростной ловушки, и что Xi, Yi является только примером такого представления. Первая скоростная ловушка может быть любым типом скоростной ловушки, такой как лазерная скоростная ловушка, радиолокационная скоростная ловушка и т.п.
Вторая скоростная ловушка, сохраненная в базе данных скоростных ловушек, ссылается на двухточечную скоростную ловушку. Вывод об этом может быть сделан из того, что следом за первым местоположением X2, Y2 сохранено также второе местоположение X2,2, Y2,2, ассоциативно связанное с первым местоположением X2, Y2. Первое местоположение X2, Y2 представляет первую точку P1 обнаружения двухточечной скоростной ловушки PP, а второе местоположение X2,2, Y2,2 представляет вторую точку P2 обнаружения двухточечной скоростной ловушки PP.
Согласно этому примеру, вообще, первое местоположение Xi, Yi представляет первую точку P1 обнаружения двухточечной скоростной ловушки PP, а второе местоположение Xi,2, Yi,2 представляет вторую точку P2 обнаружения двухточечной скоростной ловушки PP.
Таким образом, дополнительная информация добавляется в базу данных скоростных ловушек, указывая, что конкретная скоростная ловушка является двухточечной скоростной ловушкой. Программное обеспечение может быть выполнено с возможностью считывать эту информацию и предоставлять предупреждение, информирующее, что пользователь въехал или скоро въедет в область двухточечного контроля, а также информирует его, когда пользователь покинул или почти покинул область двухточечного контроля.
Последовательность операций варианта осуществления 1
Согласно варианту осуществления навигационное устройство 10 может быть выполнено с возможностью выполнять действия, которые представлены ниже и описаны в последовательности операций на фиг.4.
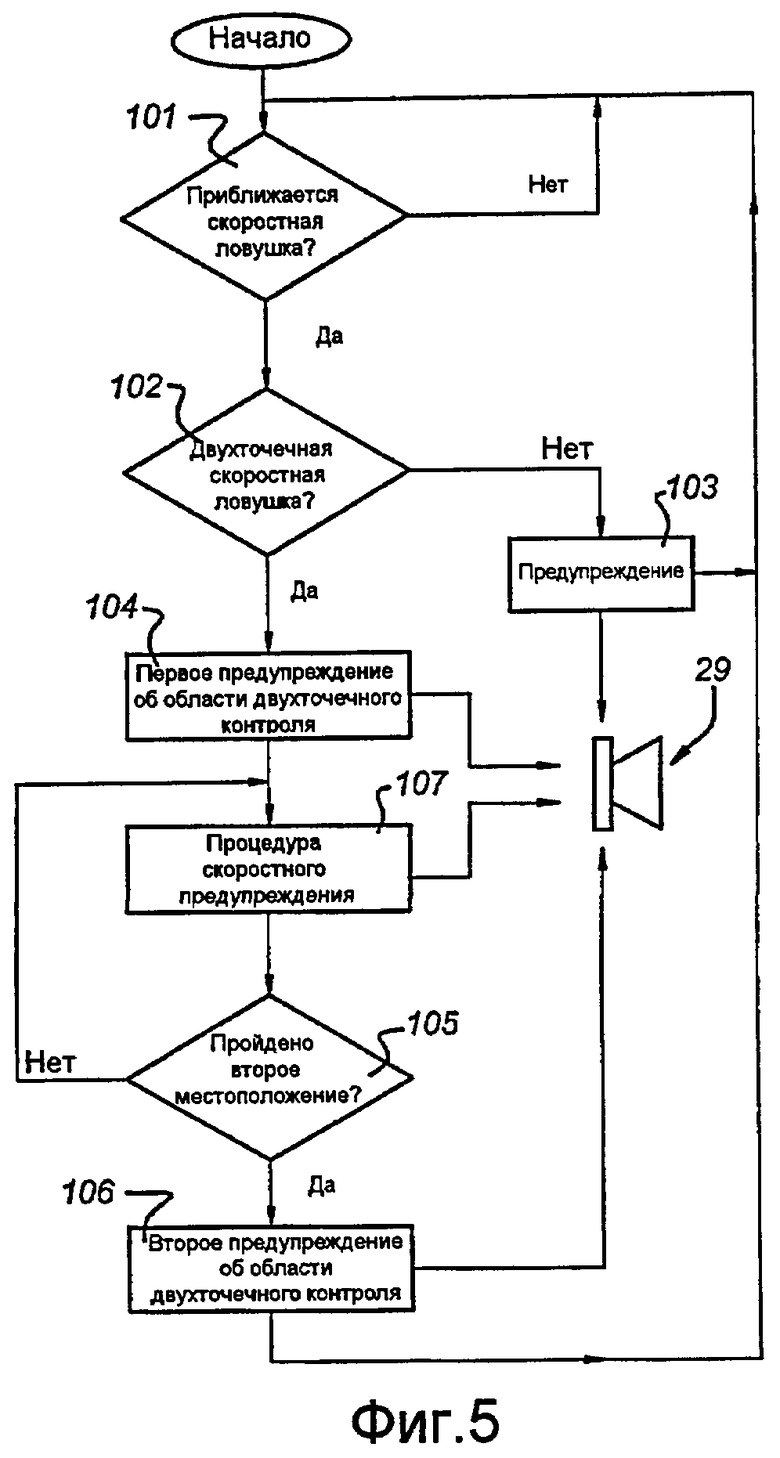
В первом действии 101 навигационное устройство 10 может быть выполнено с возможностью определения, приближается или нет скоростная ловушка. Это может быть выполнено множеством способов, как следует понимать специалисту в данной области техники. При определении того, приближается или нет скоростная ловушка, навигационное устройство 10 может принимать во внимание расстояние до скоростных ловушек, сохраненных в базе данных скоростных ловушек, направление передвижения навигационного устройства 10, направление, в котором ориентирована скоростная ловушка, отрезок дороги, на котором расположена скоростная ловушка, отрезок дороги, по которому передвигается навигационное устройство 10 и т.д., как следует понимать специалисту в данной области техники. Следует понимать, что в базе данных скоростных ловушек может быть сохранена дополнительная информация, чтобы предоставить возможность такого определения согласно действию 101. Для выполнения действия 101 навигационное устройство 10 может использовать информацию из базы данных скоростных ловушек, сохраненной в блоках 12-15 памяти, и устройство 23 позиционирования, как схематически изображено на фиг.4.
В случае, когда скоростная ловушка не приближается, навигационное устройство 10 может повторить действие 101. В случае, когда скоростная ловушка приближается, навигационное устройство 10 может определить, какой тип скоростной ловушки приближается, в действии 102. Это может быть выполнено посредством считывания информации о типе скоростной ловушки из базы данных скоростных ловушек, сохраненной в памяти 12-15. Согласно примеру, предоставленному выше, это выполняется посредством проверки, сохранено ли второе местоположение Xi,2, Yi,2 в базе данных скоростных ловушек, сохраненной в памяти 12-15, ассоциативно связанное с первым местоположением Xi, Yi скоростной ловушки, которая приближается.
В случае, когда приближающаяся скоростная ловушка, не является двухточечной скоростной ловушкой, навигационное устройство 10 может продолжить выполнение действия 103, в котором формируется предупреждение, например, общее предупреждение о скоростной ловушке. Это предупреждение может быть любым типом предупреждения, например, звуковым предупреждением, выводимым через динамик 29.
В случае, когда приближающаяся скоростная ловушка является двухточечной скоростной ловушкой, навигационное устройство 10 может продолжить выполнение действия 104, в котором формируется первое предупреждение об области двухточечного контроля. Это предупреждение может быть любым типом предупреждения, например, звуковым предупреждением, предоставленным через динамик 29. Первое предупреждение об области двухточечного контроля может отличаться от предупреждения, сформированного в действии 103, чтобы информировать пользователя, что приближается двухточечная скоростная ловушка, таким образом, пользователь может приспособить его/ее манеру вождения на этой основе.
После того как сформировано предупреждение об области двухточечного контроля, навигационное устройство 10 продолжает выполнение действия 105, в котором определяется, проехало ли навигационное устройство 10 второе местоположение Xi,2, Yi,2, ассоциативно связанное с первым местоположением Xi, Yi скоростной ловушки. Пока второе местоположение Xi,2, Yi,2 не пройдено, навигационное устройство повторяет действие 105.
После того как второе местоположение Xi,2, Yi,2 было пройдено, навигационное устройство 10 предоставляет второе предупреждение об области двухточечного контроля. Опять же, это второе предупреждение об области двухточечного контроля может быть любым типом предупреждения, например, звуковым предупреждением, выводимым через динамик 29. Второе предупреждение об области двухточечного контроля может отличаться от предупреждения, сформированного в действии 103, и от первого предупреждения об области двухточечного контроля, сформированного в действии 104, чтобы информировать пользователя, что область двухточечного контроля покинута, таким образом, пользователь может приспособить его/ее манеру вождения на этой основе.
Первое предупреждение об области двухточечного контроля может быть устным предупреждением, говорящим пользователю: 'Вы находитесь около въезда в область двухточечного контроля', в то время как второе двухточечное предупреждение может быть другим предупреждением, например, говорящим пользователю 'Вы покинули область двухточечного контроля'. Первое и второе предупреждения об области двухточечного контроля могут также быть двумя отдельными звуками или мелодиями.
Конечно, все предупреждения могут также быть визуальными предупреждениями, предоставляемыми через дисплей 18, или комбинацией визуального и звукового предупреждения.
Навигационное устройство 10 может также быть выполнено с возможностью предоставления 'постоянного' предупреждения, непрерывно уведомляющего пользователя, что он/она находится в области с контролируемой скоростью. Например, в случае, когда предупреждение является визуальным предупреждением, отображаемым через дисплей 18, предупреждение может непрерывно отображаться до тех пор, пока не будет пройдено второе местоположение Xi,2, Yi,2. Второе предупреждение об области двухточечного контроля может, следовательно, быть просто прекращением предоставления первого предупреждения об области двухточечного контроля.
Вариант осуществления 2
Согласно второму варианту осуществления навигационное устройство 10 может дополнительно быть выполнено с возможностью предоставления скоростных предупреждений между первой точкой P1 обнаружения и второй точкой P2 обнаружения, если навигационное устройство 10 обнаруживает, что пользователь едет с превышением скорости, т.е. нарушает ограничение скорости, применимое для этого отдельного отрезка дороги.
Например, скоростные предупреждения могут формироваться, если скорость навигационного устройства 10 (т.е. транспортного средства), например, определенная на основе информации, принятой с помощью устройства 23 позиционирования, превышает пороговое значение скорости, сохраненное в блоке 12-15 памяти навигационного устройства 10.
Согласно другому примеру могут формироваться скоростные предупреждения, если средняя скорость навигационного устройства 10 (т.е. транспортного средства), например, определенная на основе информации, принятой с помощью устройства 23 позиционирования, превышает пороговое значение скорости, сохраненное в навигационном устройстве 10.
В обоих примерах пороговое значение скорости, сохраненное в блоке 12-15 памяти, может соответствовать максимальной скорости для отрезка дороги между точкой P1 обнаружения и точкой P2 обнаружения. Например, в случае, когда максимальная скорость для отрезка дороги равна 100 км/ч, пороговое значение скорости может быть 100 км/ч или 103 км/ч.
Согласно первому примеру, навигационное устройство 10 постоянно проверяет текущую скорость транспортного средства, сравнивая последовательные измерения от устройства 23 позиционирования, как обычно постоянно выполняется в навигационном устройстве 10. Когда скорость, которая была определена, превышает пороговое значение скорости, ассоциативно связанное с отрезком дороги и сохраненное в блоке 12-15 памяти, может быть предоставлено скоростное предупреждения.
Согласно второму примеру, определяется и сравнивается с пороговым значением скорости средняя скорость навигационного устройства 10 между первой и второй точками обнаружения двухточечной скоростной ловушки. Чтобы выполнить это, навигационное устройство 10 может быть выполнено с возможностью вычислять среднюю скорость навигационного устройства 10, по меньшей мере, в определенных позициях или постоянно в области, контролируемой двухточечной скоростной ловушкой, и сравнивает эту среднюю скорость с пороговым значением скорости, ассоциативно связанным с отрезком дороги и сохраненным в блоке 12-15 памяти.
Таким образом, после въезда в область, контролируемую двухточечной скоростной ловушкой, навигационное устройство 10 может быть выполнено с возможностью запуска вычисления средней скорости навигационного устройства 10 между первой точкой обнаружения и текущей позицией. Навигационное устройство 10 может периодически предоставлять скоростные предупреждения, если средняя скорость превышает пороговое значение скорости.
Следует понимать, что также может применяться комбинация двух примеров, приведенных выше, т.е. навигационное устройство 10 может быть выполнено с возможностью определения как текущей скорости, так и средней скорости навигационного устройства 10 и сравнения их с пороговым значением скорости. Если одна из текущей/средней скорости выше, чем пороговое значение скорости, навигационное устройство 10 может периодически выдавать скоростное предупреждение. Такое скоростное предупреждение может быть отдельным звуком или устным сообщением, выводимым через динамик 29, и/или визуальным предупреждением, таким как иконка, отображаемая на дисплее 18. В случае, когда скоростное предупреждение является устным скоростным предупреждением, устное предупреждение может быть, например, таким: 'Вы все еще находитесь в области двухточечного контроля, и вы едете слишком быстро' или 'Вы все еще находитесь в области двухточечного контроля и вы едете слишком быстро. Ограничение скорости в этой области составляет 100 км/ч'.
Указание средней скорости
Скоростные предупреждения могут быть указанием текущей скорости или указанием средней скорости и могут выдаваться периодически в перемещении вдоль всей области двухточечного контроля. Период скоростных предупреждений может быть 5-20 секунд в зависимости от того, насколько превышено ограничение скорости, используя так называемую адаптивную схему. Указание средней скорости может также выдаваться постоянно, т.е. может обновляться для каждой новой позиции, принятой от устройства 23 позиционирования.
Например, если водитель едет слишком быстро, тогда предупреждения могут предоставляться заблаговременно в области двухточечного контроля, чтобы дать водителю время скорректировать итоговую среднюю скорость. Если, с другой стороны, водитель едет с незначительным превышением скорости, тогда нет необходимости досаждать предупреждениями слишком часто или заблаговременно в области двухточечного контроля.
Навигационное устройство 10 может быть выполнено с возможностью отображения указания средней скорости, информирующего водителя о средней скорости от первой точки P1 обнаружения до текущей позиции между первой точкой P1 обнаружения и второй точкой P2 обнаружения. Такое указание средней скорости может быть вычислено посредством непрерывного вычисления средней скорости до сих пор, используя в качестве входных данных момент времени, в который была пройдена первая точка обнаружения, местоположение первой точки P1 обнаружения, текущее время и текущую позицию. Указание средней скорости может обновляться каждую секунду или с подобной частотой.
В комбинации с указанием средней скорости может быть отображена целевая средняя скорость, например, ограничение скорости для области двухточечного контроля или пороговое значение скорости, ассоциативно связанное с областью двухточечного контроля.
Также в комбинации с указанием средней скорости может отображаться рекомендуемая скорость vadv, информирующая водителя о рекомендованной скорости. При въезде в область двухточечного контроля эта рекомендуемая скорость vadv может быть ограничением скорости для области двухточечного контроля или пороговым значением скорости vthreshold, ассоциативно связанным с областью двухточечного контроля. Однако во время движения от первой точки P1 обнаружения и до второй точки P2 рекомендуемая скорость vadv может изменяться, как результат манеры вождения до настоящего времени.
Например, в случае, когда навигационное устройство 10 обнаруживает, что оно находится на половине пути в области двухточечного контроля, средняя скорость до настоящего времени превышает пороговое значение скорости vthreshold, рекомендуемая скорость vadv выбирается такой, что, в случае, когда пользователь следует рекомендуемой скорости vadv, средняя скорость vaverage в конце области двухточечного контроля не превышает порогового значения скорости vthreshold.
Рекомендуемая скорость vadv может быть вычислена посредством первого вычисления рекомендуемого времени tadv, в течение которого навигационное устройство 10 должно проехать вторую точку P2 обнаружения, что может быть вычислено как:
где t1 является временем прохождения первой точки P1 обнаружения, X является расстоянием между первой и второй точкой P1, P2 обнаружения, а vthreshold является пороговым значением скорости, ассоциативно связанным с конкретной двухточечной скоростной ловушкой.
Рекомендуемая скорость vadv может быть вычислена следующим образом:
где tadv>tcurrent и где Lcurrent является текущим местоположением навигационного устройства, которое, например, измерено устройством 23 позиционирования, L2 - местоположение второй точки P2 обнаружения, tcurrent - текущее время. В случае, когда tadv<tcurrent, скорость навигационного устройства 10 относительно мала. Чтобы не допустить отрицательной рекомендуемой скорости vadv, дополнительные предупреждения не нужны, если tadv<tcurrent.
Конечно, все предупреждения и указания могут также быть предоставлены как звуковое предупреждение через динамик 29.
В случае, когда пользователь едет очень медленно или быстро по сравнению с пороговой скоростью vthreshold, рекомендуемая скорость vadv может быть очень высокой или очень низкой, соответственно. Чтобы не допустить предоставление рекомендуемой скорости, которая конфликтует с законом, vadvisory может быть сравнена с верхним и/или нижним ограничением скорости для рекомендуемой скорости. Верхнее ограничение скорости может быть таким же, что и ограничение скорости или пороговая скорость, а нижнее ограничение скорости может соответствовать минимальной допустимой скорости согласно закону. Эта проверка может быть частью действия 107.
Рекомендуемая скорость может быть предоставлена пользователю посредством указания рекомендуемой скорости, которое может быть пассивным или бесшумным, например, иконкой в углу дисплея 18.
Последовательность операций варианта осуществления 2
Фиг.5 схематически изображает последовательность операций согласно второму варианту осуществления. Фиг.5 похожа на фиг.4, кроме того факта, что между действием 104 и 105 предусмотрено дополнительное действие 107.
После того как действие 104 завершено, навигационное устройство 10 может начать процедуру скоростного предупреждения. Как объяснено выше, эта процедура скоростного предупреждения может содержать сравнение текущей скорости с пороговым значением скорости и/или сравнение средней скорости с пороговым значением скорости.
Дополнительные варианты осуществления
Согласно дополнительному варианту осуществления предоставлено навигационное устройство 10 для предоставления предупреждений о приближении точки обнаружения скоростной ловушки,
навигационное устройство 10 содержит процессор 11 и блок 12-15 памяти, процессор 11 выполнен с возможностью связываться с блоками 12-15 памяти и принимать позиционную информацию от устройства 23 позиционирования,
блок 12-15 памяти выполнен с возможностью содержать базу данных скоростных ловушек, содержащую, по меньшей мере, одну точку P1 обнаружения местоположения скоростной ловушки,
при этом навигационное устройство 10 дополнительно выполнено с возможностью предоставления предупреждения, когда одна, по меньшей мере, из одной точки P1 обнаружения приближается,
при этом навигационное устройство 10 выполнено с возможностью предоставления скоростных предупреждений от точки P1 обнаружения, если навигационное устройство 10 обнаруживает, что скорость навигационного устройства 10 превышает пороговое значение скорости, пороговое значение скорости хранится в блоке 12-15 памяти.
Такое навигационное устройство 10 предоставляет скоростные предупреждения при проезде контролируемой области. Также навигационное устройство 10 может быть выполнено с возможностью сначала проверять, является ли скоростная ловушка двухточечной скоростной ловушкой.
Согласно варианту скорость определяется на основе принятой позиционной информации от устройства 23 позиционирования.
Согласно варианту навигационное устройство выполнено с возможностью предоставления скоростного предупреждения скорости, если текущая скорость навигационного устройства 10 превышает пороговое значение скорости.
Согласно варианту навигационное устройство 10 выполнено с возможностью предоставления скоростного предупреждения, если средняя скорость навигационного устройства 10 превышает пороговое значение скорости. Средняя скорость может быть вычислена от первой точки обнаружения до текущей позиции.
Согласно варианту осуществления навигационное устройство 10 выполнено с возможностью вычисления рекомендованной скорости vadv. Эта рекомендованная скорость может рекомендовать пользователю скорость движения, чтобы не допустить слишком быстрого покидания области, контролируемой двухточечной скоростной ловушкой.
Согласно варианту осуществления блок 12-15 памяти дополнительно выполнен с возможностью содержать, по меньшей мере, дополнительную точку P2 обнаружения, ассоциативно связанную, по меньшей мере, с одной из сохраненных точек P1 обнаружения, точка P1 обнаружения и дополнительная точка P2 обнаружения обе относятся к одной и той же двухточечной скоростной ловушке, при этом навигационное устройство 10 дополнительно выполнено с возможностью прекращать предоставление скоростных предупреждений, когда дополнительная точка P2 обнаружения приближается или была пройдена. Навигационное устройство может быть дополнительно выполнено с возможностью предоставления предупреждения, когда дополнительная точка P2 обнаружения приближается или была пройдена.
Варианты осуществления, описанные выше, могут использоваться во всех видах навигационного устройства 10, таких как переносное, карманное, встроенное навигационное устройство 10. Конечно, варианты осуществления также могут использоваться во встроенном бортовом компьютере транспортного средства или как часть автомобильной радиосистемы.
Поскольку конкретные варианты осуществления изобретения были описаны выше, следует признать, что изобретение может быть осуществлено на практике другими способами, чем были описаны. Например, изобретение может принимать форму вычислительной программы, содержащей одну или множество последовательностей машиночитаемых инструкций, описывающих способ, раскрытый выше, или носителя хранения данных (например, полупроводниковая память, магнитный или оптический диск), имеющего подобную вычислительную программу, сохраненную на нем. Как следует понимать специалистам в данной области техники, все программные компоненты также могут быть реализованы в виде аппаратных компонентов.
Вышеприведенные описания рассматриваются в качестве иллюстративных, а не ограничивающих. Таким образом, для специалистов в данной области техники очевидно, что могут быть реализованы модификации описанного изобретения без отступления от границ формулы изобретения, приведенной ниже.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕТЕКТОР РАДАРОВ, ВЗАИМОДЕЙСТВУЮЩИЙ С МОБИЛЬНЫМ УСТРОЙСТВОМ СВЯЗИ | 2010 |
|
RU2525835C2 |
| СИСТЕМА МОБИЛЬНОЙ СВЯЗИ И СПОСОБ АНАЛИЗА ПРЕДУПРЕЖДЕНИЙ, СВЯЗАННЫХ С АВТОМОБИЛЬНЫМ ДВИЖЕНИЕМ | 2014 |
|
RU2625522C2 |
| СПОСОБ АНАЛИЗИРОВАНИЯ ДАННЫХ, ПОЛУЧЕННЫХ ОТ ОБЪЕДИНЕННЫХ ДЕТЕКТОРОВ РАДАРОВ | 2010 |
|
RU2515465C2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО С ИНФОРМАЦИЕЙ, ПОЛУЧАЕМОЙ ОТ КАМЕРЫ | 2005 |
|
RU2375756C2 |
| СПОСОБ ФОРМИРОВАНИЯ УЛУЧШЕННЫХ КАРТОГРАФИЧЕСКИХ ДАННЫХ ДЛЯ ИСПОЛЬЗОВАНИЯ В НАВИГАЦИОННЫХ УСТРОЙСТВАХ | 2007 |
|
RU2482540C2 |
| СИСТЕМА И СПОСОБ ПСЕВДОНАВИГАЦИОННОЙ ПОМОЩИ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2695037C1 |
| СПОСОБ СОЗДАНИЯ КАРТОГРАФИЧЕСКИХ ДАННЫХ | 2008 |
|
RU2498220C2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО, НАВИГАЦИОННЫЙ СЕРВЕР И НАВИГАЦИОННАЯ СИСТЕМА | 2007 |
|
RU2389976C1 |
| ДОСТАВКА, ОБРАБОТКА И ОБНОВЛЕНИЕ НОВОЙ КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 2011 |
|
RU2563104C2 |
| ДОСТАВКА, ОБРАБОТКА И ОБНОВЛЕНИЕ НОВОЙ КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 2011 |
|
RU2577548C2 |
Изобретение относится к области навигации транспортных средств. Технический результат заключается в предоставлении предупреждений при проезде контролируемой области, например двухточечной скоростной ловушки. Для этого навигационное устройство содержит процессор, выполненный с возможностью связываться с блоком памяти и принимать позиционную информацию от устройства позиционирования, и блок памяти, выполненный с возможностью содержать базу данных скоростных ловушек, содержащую точки обнаружения и дополнительные точки обнаружения местоположения двухточечных скоростных ловушек. При этом дополнительная точка обнаружения связана с, по меньшей мере, одной из сохраненных точек обнаружения, причем обе относятся к одной и той же двухточечной скоростной ловушке. Кроме того, навигационное устройство выполнено с возможностью предоставления предупреждения, когда одна из точек обнаружения приближается, и возможностью предоставления предупреждения, когда дополнительная точка обнаружения приближается или была пройдена. 4 н. и 15 з.п. ф-лы, 5 ил.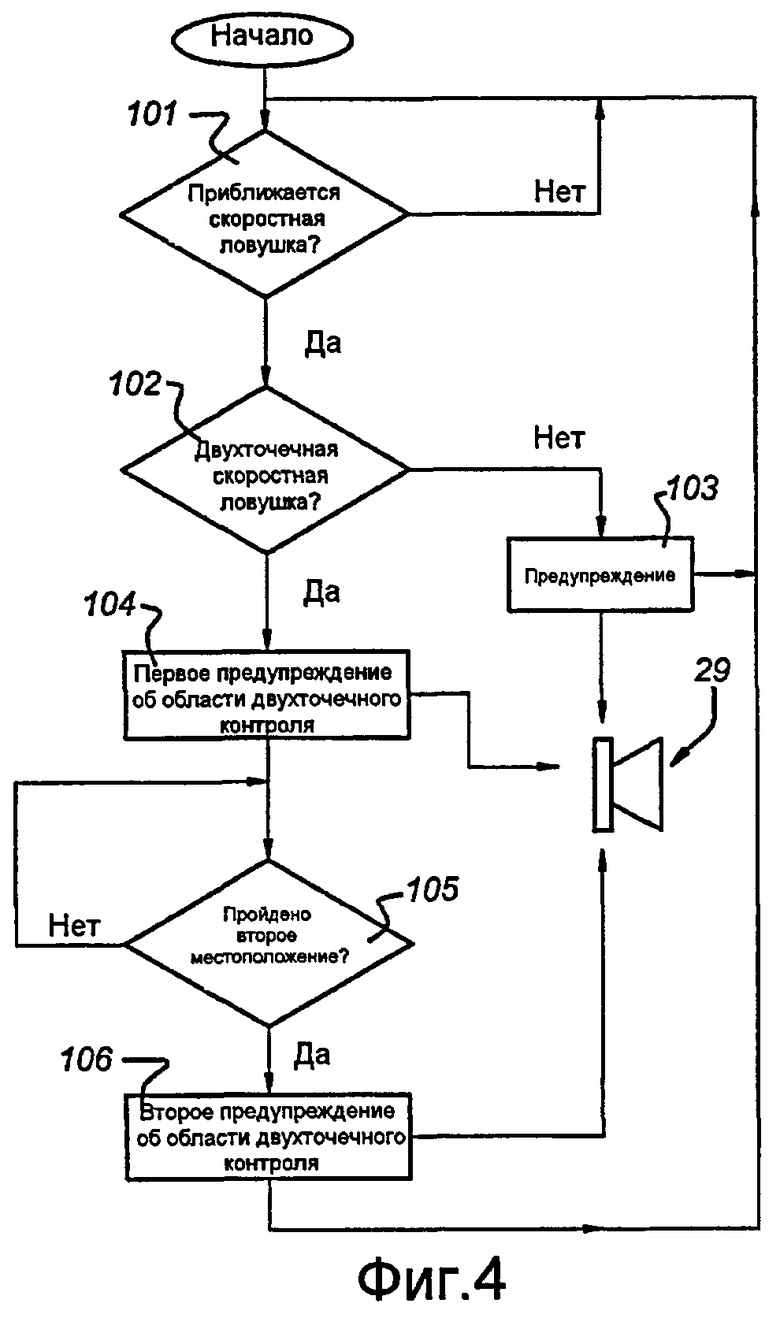
1. Навигационное устройство (10) для предоставления предупреждений, когда приближается точка обнаружения скоростной ловушки, содержащее
процессор (11) и блок (12-15) памяти, процессор (11) выполнен с возможностью связываться с блоком (12-15) памяти и принимать позиционную информацию от устройства (23) позиционирования,
блок (12-15) памяти выполнен с возможностью содержать базу данных скоростных ловушек, содержащую, по меньшей мере, одну точку (Р1) обнаружения и дополнительную точку обнаружения местоположения двухточечной скоростной ловушки,
при этом навигационное устройство (10) дополнительно выполнено с возможностью предоставления предупреждения, когда одна из, по меньшей мере, одной точки (Р1) обнаружения приближается,
отличающееся тем, что
дополнительная точка (Р2) обнаружения связана с, по меньшей мере, одной из сохраненных точек (Р1) обнаружения, причем дополнительная точка (Р2) обнаружения и связанная точка (Р1) обнаружения, обе, относятся к одной и той же двухточечной скоростной ловушке,
при этом навигационное устройство (10) дополнительно выполнено с возможностью предоставления предупреждения, когда дополнительная точка (Р2) обнаружения приближается или была пройдена.
2. Навигационное устройство по п.1, которое выполнено с возможностью
предоставлять предупреждение, которое является первым предупреждением об области двухточечного контроля, в случае, когда дополнительная точка (Р2) обнаружения связана с приближающейся точкой (Р1) обнаружения, и
предоставлять предупреждение, которое является вторым предупреждением об области двухточечного контроля, в случае, когда дополнительная точка (Р2) обнаружения приближается или была пройдена.
3. Навигационное устройство по п.1, которое содержит дисплей (18), и предупреждение может быть визуальным предупреждением, предоставляемым через дисплей (18).
4. Навигационное устройство по п.1, которое содержит динамик (29), и предупреждение может быть звуковым предупреждением, предоставляемым через динамик (29).
5. Навигационное устройство по п.1, в котором предупреждение может быть комбинацией визуального и слышимого предупреждения.
6. Навигационное устройство по п.1, которое выполнено с возможностью предоставлять скоростные предупреждения между точкой (Р1) обнаружения и дополнительной точкой (Р2) обнаружения, если навигационное устройство (10) обнаруживает, что скорость навигационного устройства (10) превышает пороговое значение скорости, пороговое значение скорости хранится в блоке (12-15) памяти и связано с отрезком дороги между точкой (Р1) обнаружения и дополнительной точкой (Р2) обнаружения.
7. Навигационное устройство (10) по п.6, в котором скорость определяется на основе принятой позиционной информации от устройства (23) позиционирования.
8. Навигационное устройство (10) по любому из пп.6 и 7, при этом навигационное устройство выполнено с возможностью предоставления скоростного предупреждения, если текущая скорость навигационного устройства (10) превышает пороговое значение скорости.
9. Навигационное устройство (10) по любому из пп.6 и 7, которое выполнено с возможностью предоставления скоростного предупреждения, если средняя скорость навигационного устройства (10) превышает пороговое значение скорости.
10. Навигационное устройство (10) по п.9, которое выполнено с возможностью вычисления рекомендуемой скорости (Vadv).
11. Транспортное средство, содержащее навигационное устройство (10) по одному из предшествующих пунктов.
12. Способ предоставления предупреждений, когда приближается точка обнаружения скоростной ловушки, содержащий этапы, на которых:
предоставляют базу данных скоростных ловушек, содержащую, по меньшей мере, одну точку (Р1) обнаружения и дополнительную точку (Р2) обнаружения местоположения двухточечной скоростной ловушки,
предоставляют предупреждение, когда приближается одна из, по меньшей мере, одной точки (Р1) обнаружения,
отличающийся тем, что
одна дополнительная точка (Р2) обнаружения связана с, по меньшей мере, одной из сохраненных точек (Р1) обнаружения, причем дополнительная точка (Р2) обнаружения и связанная точка (Р1) обнаружения, обе, относятся к одной и той же скоростной ловушке,
предоставляют предупреждения, когда дополнительная точка (Р2) обнаружения приближается или была пройдена.
13. Способ по п.12, дополнительно содержащий этапы, на которых:
предоставляют предупреждение, которое является первым предупреждением об области двухточечного контроля, в случае, когда дополнительная точка (Р2) обнаружения связана с приближающейся точкой (Р1) обнаружения, и
предоставляют предупреждение, которое является вторым предупреждением об области двухточечного контроля, в случае, когда дополнительная точка (Р2) обнаружения приближается или была пройдена.
14. Способ по любому из пп.12 и 13, который дополнительно содержит этап, на котором:
предоставляют скоростные предупреждения между точкой (Р1) обнаружения и дополнительной точкой (Р2) обнаружения, если обнаружено, что скорость навигационного устройства (10) превышает пороговое значение скорости, пороговое значение скорости связано с отрезком дороги между точкой (Р1) обнаружения и дополнительной точкой (Р2) обнаружения.
15. Способ по п.14, в котором скорость определяют на основе принятой позиционной информации от устройства (23) позиционирования.
16. Способ по п.14, в котором предоставляют скоростное предупреждение, если текущая скорость превышает пороговое значение скорости.
17. Способ по п.14, в котором предоставляют скоростное предупреждение, если средняя скорость навигационного устройства (10) превышает пороговое значение скорости.
18. Способ по п.17, в котором вычисляют рекомендуемую скорость (Vadv).
19. Носитель данных, содержащий компьютерную программу, сохраненную на нем, содержащий одну или более последовательностей машиночитаемых инструкций, которые, когда загружены в вычислительное устройство, дают возможность выполнять способ по п.12.
| ЕР 1266238 В1, 30.03.2005 | |||
| RU 2055398 C1, 27.02.1996 | |||
| JP 200020891 А, 21.01.2000 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| JP 2005300184 A, 27.10.2005. | |||

