Изобретение относится к колесным транспортным средствам (КТС) со всеми ведущими управляемыми полноповоротными колесами и кузовом, с дистанционным управлением.
За прототип принято техническое решение по патентам на изобретение RU 2291808, 2003 «Колесное транспортное средство», 2342275, 2008 «Механизмы колесного транспортного средства» и заявке на изобретение №2008151806 «Дистанционно управляемое колесное транспортное средство», решение о выдаче патента на изобретение которого выдано 10.11.2009 г.
Дистанционно управляемое КТС содержит колесную платформу с не менее чем тремя колесными парами, поворотный относительно центральной вертикальной оси колесной платформы кузов, башню с механизмом стабилизации ее положения, опорные ролики, аккумуляторные батареи, два электродвигателя для обеспечения движения и поворота кузова, центральный редуктор, трансмиссию с ходовой частью, привод управления, тормоз, амортизацию колес и блок оборудования для дистанционного управления транспортным средством. Трансмиссия обеспечивает передачу крутящего момента от левого электродвигателя через левую коническую передачу центрального редуктора, ведомое колесо которой соединено с ведущей звездочкой первой цепной передачи, к каждой колесной паре посредством одной цепи с натяжным устройством на ведомые звездочки, соединенные с ведущими валами межколесных дифференциалов. Поворот кузова относительно колесной платформы осуществляется от правого электродвигателя на вторую коническую зубчатую передачу центрального редуктора, ведомое колесо которой соединено с верхней частью корпуса колесной платформы. Поворот всех колесных пар происходит при повороте кузова относительно колесной платформы от нижнего вала центрального редуктора, соединенного с кузовом и с ведущей шестерней цилиндрической зубчатой передачи, ведомое колесо которой соединено с ведущей звездочкой второй цепной передачи, к каждой поворотной колонке посредством цепи на ведомые звездочки, соединенные с поворотными колонками. Тормоз механического типа установлен между коробкой передач и первой зубчатой конической передачей центрального редуктора. Амортизация колес осуществляется установкой пружинных рессор и амортизаторов на телескопические поворотные колонки колесных пар. Стабилизация положения башни относительно сторон света в горизонтальной плоскости достигается при поворотах КТС путем поворота ее относительно кузова в обратную сторону и на такой же угол с помощью цилиндрической и конической зубчатых передач в центральном редукторе.
Недостатком прототипа является сложность конструкции привода управления и механизма стабилизации положения башни.
Технический результат изобретения - изменение, упрощение конструкции привода управления и механизма стабилизации положения башни.
Заявленная конструкция КТС с дистанционным управлением содержит колесную платформу с не менее чем тремя колесными парами, поворотный относительно колесной платформы кузов, башню с механизмом стабилизации ее положения, опорные ролики, аккумуляторные батареи, два электродвигателя для движения средства, поворота кузова и колесных пар, центральный редуктор, трансмиссию с ходовой частью, привод управления, тормоз, амортизацию колес и блок оборудования для дистанционного управления средством. Поворот кузова относительно центральной вертикальной оси колесной платформы осуществляется от правого электродвигателя через соединительную муфту на правую зубчатую коническую передачу центрального редуктора, ведомое колесо которой жестко соединено центральной вертикальной осью с днищем корпуса колесной платформы. Поворот всех колесных пар происходит синхронно и на такой же угол, что и кузов при его повороте относительно центральной вертикальной оси колесной платформы посредством трубы, жестко соединенной с опорой горизонтальных валов центрального редуктора и с двумя ведущими звездочками цепных передач, а ведомые звездочки жестко соединены с поворотными колонками и с корпусами межколесных дифференциалов колесных пар. Стабилизация положения башни относительно сторон света в горизонтальной плоскости при маневрировании транспортного средства достигается путем соединения ее с корпусом колесной платформы с помощью управляемой зубчатой муфтой сцепления, при этом ведущая полумуфта жестко соединена с ведомым зубчатым коническим колесом зубчатой передачи привода поворота кузова и центральной вертикальной осью, а ведомая управляемая полумуфта установлена на валу, жестко соединенном с башней, подвижно без вращения и имеет два фиксированных положения: нижнее - включения, а верхнее - выключения стабилизации положения башни.
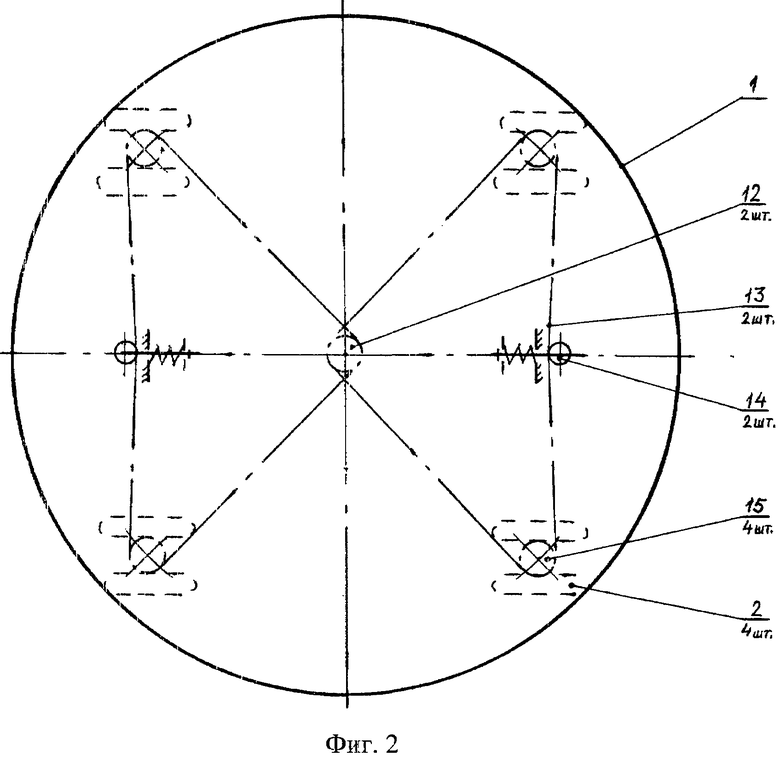
Конструкция КТС с дистанционным управлением поясняется чертежами, где представлено: на фиг.1 - кинематическая схема привода управления и механизма стабилизации положения башни (вид сбоку, правая колесная пара условно повернута на 90°); на фиг.2 - кинематическая схема привода поворота колесных пар (вид сверху без кузова и верхней части колесной платформы).
В конструкции КТС с дистанционным управлением без изменения, как у прототипа, остаются (фиг.1, 2): общая компоновка, колесная платформа 1 с четырьмя колесными парами 2, кузов 3, башня 4, опорные ролики 5, аккумуляторные батареи, два электродвигателя для обеспечения движения средства 6 и поворота кузова 7, центральный редуктор 8, трансмиссия с ходовой частью, тормоз 9, амортизация колес и блок оборудования для дистанционного управления средством.
Отличия конструкции КТС показаны на фиг.1, 2.
В привод управления входят приводы поворота кузова 3 и колесных пар 2.
Изменен привод поворота кузова 3 (фиг.1) относительно колесной платформы 1 путем изменения расположения и установки ведомого зубчатого конического колеса передачи 11 в центральном редукторе 8. Поворот кузова 3 относительно центральной вертикальной оси 10 колесной платформы 1 осуществляется от правого электродвигателя 7 через соединительную муфту на правую зубчатую коническую передачу 11 центрального редуктора 8, ведомое колесо которой жестко соединено центральной вертикальной осью 10 с днищем корпуса колесной платформы 1. Ведущее колесо, обегая неподвижное ведомое колесо, поворачивает кузов.
Изменен и упрощен привод поворота колесных пар 2 (фиг.1, 2) путем замены зубчатой цилиндрической и цепной передач двумя цепными передачами с передаточным числом 1:1 и жесткого соединения их ведущих звездочек 12 с кузовом 3. Каждая цепная передача состоит из ведущей звездочки 12, приводной цепи 13, натяжного устройства 14 и двух ведомых звездочек 15. Поворот всех колесных пар 2 происходит синхронно и на такой же угол, что и кузов 3 при его повороте относительно центральной вертикальной оси 10 колесной платформы 1 посредством трубы 16, жестко соединенной с опорой горизонтальных валов 17 центрального редуктора 8 и с двумя ведущими звездочками 12 цепных передач. Ведомые звездочки 15 жестко соединены с поворотными колонками 18 и с корпусами межколесных дифференциалов 19 колесных пар 2. При необходимости движения КТС по двум колеям устанавливаются два механизма отключения от поворота и фиксации двух смежных колесных пар 2, а также ограничения поворота кузова 3 и двух других управляемых колесных пар на угол до 180° аналогично конструкции КТС с ручным управлением.
Значительно изменен и упрощен механизм стабилизации положения башни 4 (фиг.1) путем замены двух зубчатых цилиндрической и конической передач одной управляемой зубчатой муфтой сцепления 20. При этом использована особенность конструкции КТС - постоянная ориентация корпуса колесной платформы 1 относительно сторон света в горизонтальной плоскости при маневрировании КТС. Стабилизация положения башни 4 достигается путем соединения ее с корпусом колесной платформы 1 с помощью управляемой зубчатой муфтой сцепления 20. При этом ведущая полумуфта жестко соединена с ведомым зубчатым коническим колесом зубчатой передачи 11 привода поворота кузова 3 и центральной вертикальной осью 10. Ведомая управляемая полумуфта установлена на оси 21, жестко соединенной с башней 4, подвижно без вращения и имеет два фиксированных положения: нижнее (I) - включения, а верхнее (II) - выключения стабилизации положения башни 4.
Таким образом, предлагаемая упрощенная конструкция привода управления и механизма стабилизации положения башни устраняет недостатки прототипа, что повышает надежность и долговечность работы КТС.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕНТРАЛЬНЫЙ РЕДУКТОР КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2392159C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2388639C1 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2010 |
|
RU2442715C1 |
| ПЛАВАТЕЛЬНОЕ ОБОРУДОВАНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2390458C1 |
| МЕХАНИЗМЫ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2342275C1 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2003 |
|
RU2291808C2 |
| ВЕЗДЕХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО СО СМЕЩАЕМЫМ ЦЕНТРОМ ТЯЖЕСТИ | 2008 |
|
RU2381941C1 |
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2168431C2 |
| Устройство для стабилизации положения кузова транспортного средства | 1979 |
|
SU1111679A3 |
| ТАЧКА | 1998 |
|
RU2152322C1 |
Изобретение относится к области машиностроения, а именно к самоходным транспортным средствам. Транспортное средство содержит колесную платформу с не менее чем тремя колесными парами, поворотный относительно колесной платформы кузов, башню с механизмом стабилизации ее положения, опорные ролики, аккумуляторные батареи, два электродвигателя для движения транспортного средства, поворота кузова и колесных пар, центральный редуктор, трансмиссию с ходовой частью, привод управления, тормоз, амортизацию колес и блок оборудования для дистанционного управления транспортным средством. Поворот кузова относительно центральной вертикальной оси колесной платформы осуществляется от правого электродвигателя через соединительную муфту на правую зубчатую коническую передачу центрального редуктора, ведомое колесо которой жестко соединено центральной вертикальной осью с днищем корпуса колесной платформы. Поворот всех колесных пар происходит синхронно и на такой же угол, что и кузов при его повороте относительно центральной вертикальной оси колесной платформы посредством трубы, жестко соединенной с опорой горизонтальных валов центрального редуктора и с двумя ведущими звездочками цепных передач, а ведомые звездочки жестко соединены с поворотными колонками и с корпусами межколесных дифференциалов колесных пар. Стабилизация положения башни относительно сторон света в горизонтальной плоскости при маневрировании транспортного средства достигается путем соединения ее с корпусом колесной платформы с помощью управляемой зубчатой муфты сцепления, при этом ведущая полумуфта жестко соединена с ведомым зубчатым коническим колесом зубчатой передачи привода поворота кузова и центральной вертикальной осью. Ведомая управляемая полумуфта установлена на валу, жестко соединенном с башней, подвижно без вращения и имеет два фиксированных положения: нижнее - включения, а верхнее - выключения стабилизации положения башни. Достигается упрощение конструкции привода управления и механизма стабилизация положения башни. 2 ил.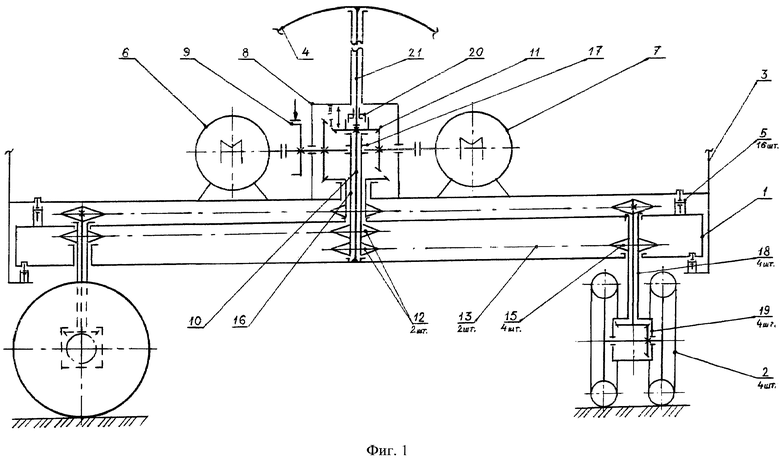
Колесное транспортное средство с дистанционным управлением, содержащее колесную платформу с не менее чем тремя колесными парами, поворотный относительно колесной платформы кузов, башню с механизмом стабилизации ее положения, опорные ролики, аккумуляторные батареи, два электродвигателя для движения транспортного средства, поворота кузова и колесных пар, центральный редуктор, трансмиссию с ходовой частью, привод управления, тормоз, амортизацию колес и блок оборудования для дистанционного управления транспортным средством, отличающееся тем, что поворот кузова относительно центральной вертикальной оси колесной платформы осуществляется от правого электродвигателя через соединительную муфту на правую зубчатую коническую передачу центрального редуктора, ведомое колесо которой жестко соединено центральной вертикальной осью с днищем корпуса колесной платформы; поворот всех колесных пар происходит синхронно и на такой же угол, что и кузов при его повороте относительно центральной вертикальной оси колесной платформы посредством трубы, жестко соединенной с опорой горизонтальных валов центрального редуктора и с двумя ведущими звездочками цепных передач, а ведомые звездочки жестко соединены с поворотными колонками и с корпусами межколесных дифференциалов колесных пар; стабилизация положения башни относительно сторон света в горизонтальной плоскости при маневрировании транспортного средства достигается путем соединения ее с корпусом колесной платформы с помощью управляемой зубчатой муфты сцепления, при этом ведущая полумуфта жестко соединена с ведомым зубчатым коническим колесом зубчатой передачи привода поворота кузова и центральной вертикальной осью, а ведомая управляемая полумуфта установлена на валу, жестко соединенном с башней, подвижно без вращения и имеет два фиксированных положения: нижнее - включения, а верхнее - выключения стабилизации положения башни.
| МЕХАНИЗМЫ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2342275C1 |
| Устройство для управления механизмом включения и выключения рабочих органов прицепных к трактору орудий | 1941 |
|
SU64681A1 |
| CN 101428642 A, 13.05.2009 | |||
| Способ активизации цемента | 1987 |
|
SU1521723A1 |

