Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для передачи вращательного движения, содержащему узел передачи движения для преобразования вращения ведущего элемента вокруг оси вращения во вращательное движение ведомого элемента вокруг оси вращения.
Изобретение, кроме того, относится к применению устройства по изобретению, в котором ведомый элемент выполнен с возможностью управления контактами дивертерного переключателя или переключателя выходных обмоток трансформатора под нагрузкой.
Кроме того, изобретение относится к способу приведения в движение элемента.
Уровень техники
В некоторых приложениях существует потребность в получении короткого, мощного вращательного движения в определенном направлении. В некоторых случаях это довольно нетрудно, если имеющийся в распоряжении привод имеет соответствующие характеристики движения Однако этот случай имеет место не всегда. Может случиться, что имеющийся в распоряжении привод осуществляет вращательное движение как в одном направлении, так и в другом направлении.
Также возникают ситуации, когда имеющийся привод не способен сразу достигнуть требуемого большого крутящего момента за нужный короткий промежуток времени Может также случиться, что оба эти недостатка имеют место одновременно в отношении имеющегося в распоряжении привода.
Одним примером такой ситуации является управление дивертерным переключателем в переключателе выходных обмоток под нагрузкой для контроля напряжения трансформатора. В этом случае может быть выгодно, чтобы управляющее движение всегда совершалось в одном и том же направлении вращения, при этом оно должно происходить за сравнительно короткий промежуток времени Обычно привод для такого дивертерного переключателя выполнен в виде приводного вала, управляющего селекторным переключателем, который представляет собой механизм, переключающий контакт на новые точки отвода в обмотке трансформатора, когда нужно изменить напряжение. Приводной вал селекторного переключателя вращается в различных направлениях в зависимости от того, стоит ли задача повышения или понижения напряжения трансформатора.
Из публикации WO 89/08924 известен механизм передачи движения, способный преобразовывать вращательное движение в том или ином направлении в однонаправленное движение, в то же время накапливая вращательное движение с течением времени. Однонаправленность движения обеспечивается особой конструкцией пружины и элементов, непосредственно взаимодействующих с ней, которые аккумулируют энергию и накапливают вращательное движение.
Из публикации WO 2006/004527 известен механизм передачи движения, который преобразует вращательное движение в том или ином направлении в однонаправленное движение, которое посредством, помимо прочего, механизма из зубчатых колес и валов передает вращательное движение в систему накопления энергии в виде пружинного блока. Когда пружинный блок с блокирующим устройством разблокируется, движение передается заключительному валу. И селекторный, и дивертерный переключатели окружены трансформаторным маслом.
В документе SE 0501712-5 описывается устройство передачи движения, преобразующее попеременное вращательное движение в однонаправленное вращательное движение с помощью линейного поступательного движения. В этом механизме передачи движения вращательное движение также передается в систему накопления энергии в виде пружинного блока.
Раскрытие изобретения
Согласно первому аспекту настоящего изобретения, ставится задача предложить усовершенствованное устройство для передачи вращательного движения, а также систему накопления механической энергии, соединенную с этим устройством.
Согласно второму аспекту перед изобретением ставится задача обеспечить улучшенное использование передачи вращательного движения.
Согласно третьему аспекту перед изобретением ставится задача обеспечить усовершенствованный способ передачи вращательного движения.
Согласно первому аспекту изобретения предлагается устройство, охарактеризованное в пункте 1 формулы изобретения. Варианты осуществления очевидны из последующих зависимых пунктов 2-10.
Согласно второму аспекту изобретения предлагается применение устройства, как охарактеризовано в пункте 11 формулы изобретения.
Изобретение также направлено на способ, согласно которому функционирует описанное устройство, и включает шаги способа для выполнения каждой функции устройства, в соответствии с третьим аспектом изобретения, как указано в пункте 12 формулы изобретения и в соответствующих зависимых пунктах 13-16.
Краткое описание чертежей
Варианты осуществления изобретения будут более подробно объяснены на примерах в последующем подробном описании предпочтительных вариантов осуществления со ссылкой на прилагаемые чертежи.
Фиг.1 представляет собой блок-схему, схематически иллюстрирующую передачу вращательного движения согласно варианту осуществления изобретения.
Фиг.2a-2d схематически иллюстрируют режим работы узла накопления энергии и соединенного с ним промежуточного элемента.
Фиг.3 подробно иллюстрирует вариант осуществления узла накопления энергии и промежуточного элемента.
Осуществление изобретения
Фиг.1 представляет собой блок-схему, схематически иллюстрирующую механическое соединение функциональных узлов, которое вызывает движение компонентов дивертерного переключателя или переключателя выходных обмоток.
Входной приводной вал 1а соединен с осью 3а вращения посредством узла 4 преобразования движения. Входной приводной вал 1а устроен так, что при работе может вращаться в одном или в другом направлении. Узел 4 преобразования движения выполнен так, что оси 3а вращения сообщается вращательное движение в одном и том же направлении независимо от того, в каком направлении вращается входной приводной вал 1а. Приводом входного приводного вала 1а является приводной вал, управляющий дивертерным селекторным переключателем (не показан) в трансформаторе, т.е. таким механизмом, который переключает контакты на новые точки отвода в обмотке трансформатора, когда нужно изменить напряжение. Входной приводной вал 1а дивертерного селекторного переключателя вращается в различных направлениях в зависимости от того, стоит ли задача повышения или понижения напряжения трансформатора. Выходная ось 3а вращения соединена с промежуточным элементом 3 и с соответствующим узлом 5 накопления энергии, а также с ведомым элементом 2 посредством приводного вала 2а. Элемент 2, в свою очередь, управляет контактами (не показанными здесь) дивертерного переключателя. Они могут иметь вид, описанный более подробно в публикации WO 2006/004527.
Узел 4 преобразования движения может, например, иметь вид, описанный в заявке WO 2006/004527, или же вид, описанный в заявке WO 2006/500552.
Когда вращается ось 3а вращения, она подает энергию в узел 5 накопления механической энергии через промежуточный элемент 3. После определенного углового перемещения оси вращения, накопленная энергия высвобождается в промежуточный элемент, быстро и мощно вращающий приводной вал 2а и, таким образом, сообщающий вращательное движение ведомому элементу 2, причем указанное вращательное движение воздействует на компоненты дивертерного переключателя, которые подробно описаны в вышеуказанном документе WO 2006/004527. Между узлом 4 преобразования движения и осью 3а вращения может быть установлено устройство переключения скоростей таким образом, чтобы движение оси 3а осуществлялось, предпочтительно, в четыре раза быстрее, чем движение узла преобразования движения.
На приводном вале 2а установлен храповый механизм 6, назначение которого состоит в том, чтобы позволить вращение промежуточного элемента в одном направлении, но заблокировать вращение в другом направлении, гарантируя тем самым, что приводящее движение не меняет направления. Храповый механизм может быть любым традиционным механизмом такого рода, таким как шестерня с храповыми зубцами, которая передает вращающий момент в одном направлении и свободно вращается в другом направлении.
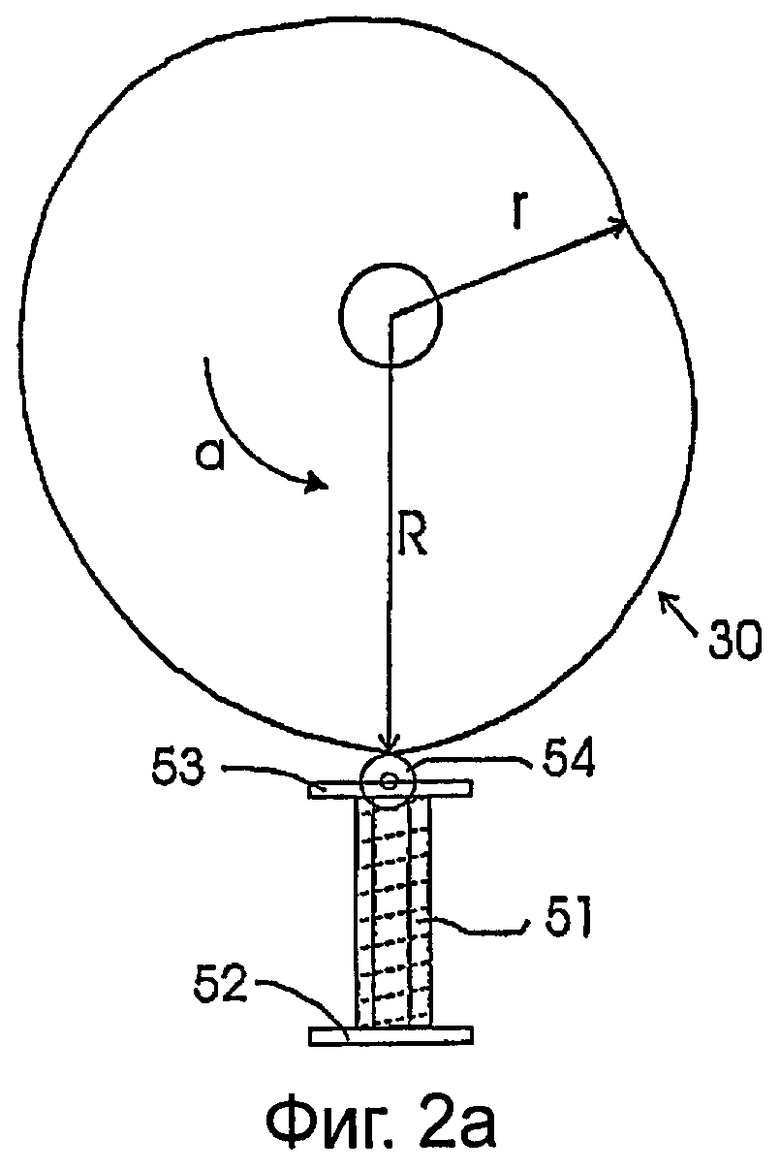
Согласно варианту осуществления изобретения промежуточный элемент 3 включает кулачковый приводной ролик 30, а узел 5 накопления механической энергии выполнен в виде блока 51 растягиваемой/сжимаемой пружины, который будет более подробно описан со ссылкой на фиг.2a-2d и на фиг.3.
На фиг.2a-2d схематически показан режим работы блока 51 растягиваемой/сжимаемой пружины 51 во взаимодействии с приводным роликом 30. Приводной ролик сконструирован так, что его максимальный диаметр равен R, а минимальный диаметр равен r. Блок 51 растягиваемой/сжимаемой пружины соединен с одной стороны с неподвижным хомутом 52 и с подвижным хомутом 53. Подвижный хомут снабжен элементом 54 качения, контактирующим с периметром приводного ролика 30. Подвижный хомут 53 выполнен с возможностью передвижения в радиальном направлении параллельно плоскости приводного ролика. Это приводит к тому, что сила пружины направлена перпендикулярно оси вращения приводного ролика, что, таким образом, значительно гасит радиально направленные силы. Подвижный хомут 53 перемещается с длиной хода, равной R-r, пока приводной ролик совершает один оборот вокруг своей оси. Направление вращения приводного ролика показано стрелкой а.
На фиг.2а приводной ролик находится в положении, при котором элемент 54 качения с подвижным хомутом контактирует с периметром приводного ролика в положении максимального радиуса R приводного ролика. В этом положении блок 51 пружины накопил максимальную механическую энергию. Это образует начальное положение для приводного движения ведомого элемента 2.
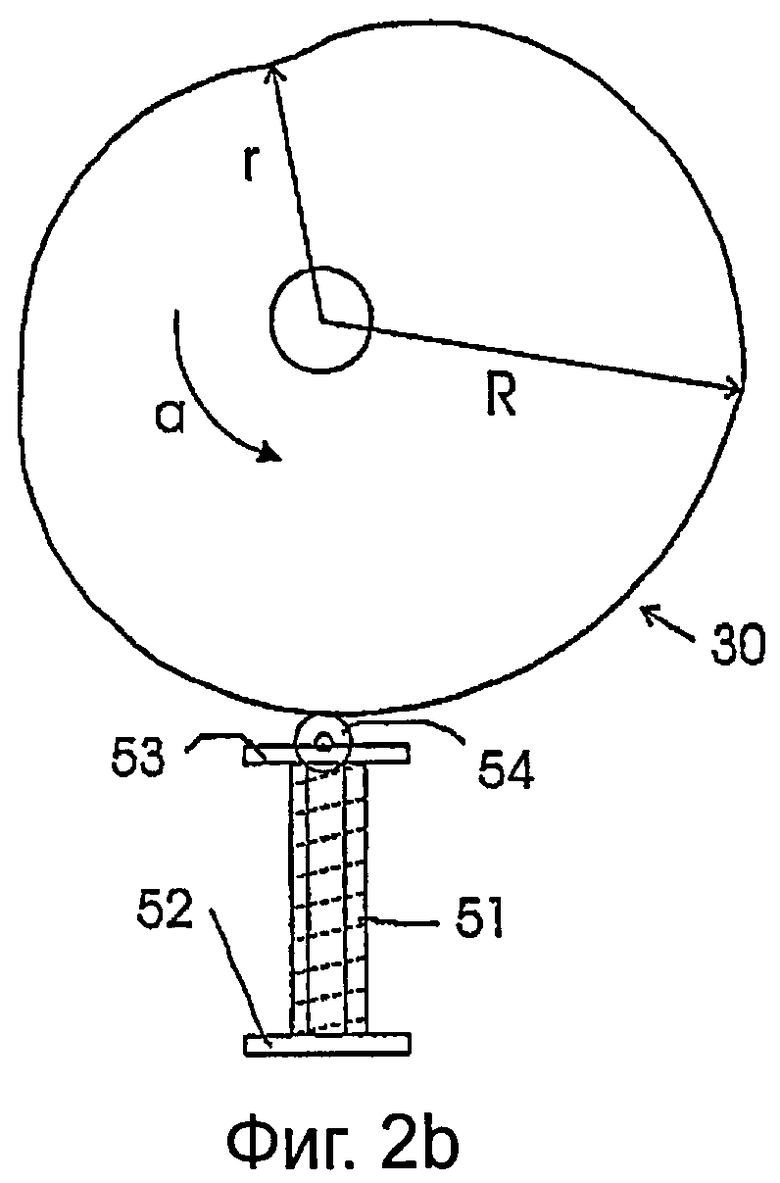
На фиг.2b показано положение, при котором механическая энергия, накопленная в блоке пружины, сообщает ускоренное движение приводному ролику через элемент 54 качения. Здесь приводной ролик был смещен приблизительно на 90° из начального положения при радиусе R.
На фиг.2с показано положение приводного ролика, при котором элемент качения достигает минимального радиуса r приводного ролика. В этом положении намеченная часть механической энергии, накопленной в блоке пружины, была передана приводному ролику. Здесь приводной ролик переместился приблизительно на две трети оборота, или на 240° из положения 2а. В данном положении блок пружины имеет также определенное предварительное напряжение, таким образом обеспечивая прилегание элемента качения к приводному ролику.
Когда приводной ролик прошел положение по фиг.2с, энергия больше не может быть передана от блока пружины. Поскольку радиус приводного ролика увеличивается, это означает, что элемент качения с подвижным хомутом после прохода положения с фиг.2с сжимает блок пружины, который, таким образом, получает механическую энергию. Эта энергия поступает от вращающего момента механического движения приводного ролика и частей, механически соединенных с ним. Это влечет за собой торможение приводного ролика.
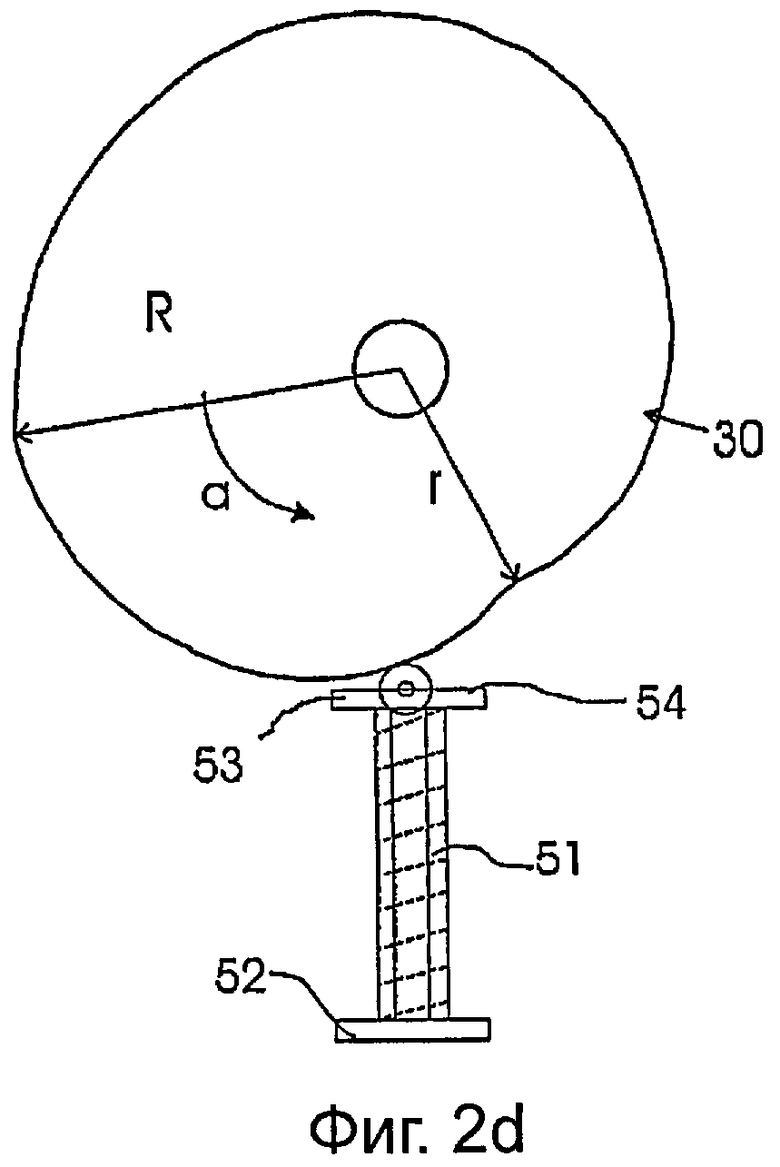
На фиг.2d показано положение, при котором приводной ролик передал свою кинетическую энергию блоку пружины и затормозился до остановки, когда скорость приводного ролика равна нулю. Из-за сцепления с храповым механизмом приводной ролик не может изменить направление вращения.
В этом положении приводной ролик находится в состоянии ожидания перед следующей операцией. Она начинается, когда входной приводной вал 1а, посредством узла 4 преобразования движения и оси 3а вращения придает движение приводному ролику. Когда приводной ролик поворачивается до своего исходного положения с фиг.2а, блок пружины вновь полностью накапливает механическую энергию, при этом полный оборот завершается.
Когда приводной ролик достигает положения согласно фиг.2а, при котором приводной ролик контактирует с элементом качения своим максимальным диаметром R, ведомым элементом 2 самопроизвольно инициируется новое приводное движение. Таким образом, для начала приводного движения приводного ролика нет необходимости в отдельном освобождающем узле.
Следует понимать, что в рамках настоящего изобретения возможно влиять на различные процессы, описанные выше, а именно, на привод приводного ролика от блока пружины, на торможение приводного ролика за счет передачи кинетической энергии от приводного ролика блоку пружины и на растяжение блока пружины до его исходного положения за счет соответствующего расчета формы кулачка. Таким образом, следует понимать, что за счет подгонки формы приводного ролика возможно влиять как на процесс ускорения, так и на процесс замедления приводного ролика. Предпочтительно, приводной ролик имеет форму, адаптированную к нагрузкам, и, следовательно, сообщает ведомому элементу 2 равномерную скорость после короткого процесса ускорения.
Также нет необходимости устанавливать отдельные тормозящие устройства для приводного ролика, так как его оставшаяся кинетическая энергия автоматически возвращается к блоку пружины, а из условия баланса энергии следует, что приводной ролик из-за любых потерь на трение, независимо от начального запаса механической энергии в блоке пружины, всегда вращается менее чем на один оборот. Это дает значительные преимущества, особенно при испытании и регулировании системы привода, так как процесс будет автоматически управляться так же и в случае, если, например, ведомый элемент 2 разъединен с последующим дивертерным переключателем. Также в тестовом положении, когда ведомый элемент разъединен с приводным роликом, он будет демонстрировать регулируемую картину перемещения.
Когда приводной ролик перемещается между положениями, показанными на фиг.2а и 2с, блок 51 пружины отдает энергию, а когда приводной ролик перемещается между положениями, показанными на фиг.2с и 2d, блок 51 пружины накапливает энергию.
На фиг.3 показана альтернативная реализация блока пружины. Две направляющие 55а и 55b, соответственно, установленные параллельно, прикреплены на концах к фиксаторам 56а и 56b. Две пружины 51а и 51b размещены так, чтобы проходить вдоль соответствующей направляющей. Пружины прикреплены к фиксатору 56а, который, таким образом, служит неподвижным хомутом. Другой конец соответствующей пружины прикреплен к общему подвижному хомуту 53, который, в свою очередь, размещен так, чтобы перемещаться параллельно направляющим. Элемент 54 качения соединен с хомутом 53 и контактирует с приводным роликом 30. В данном случае блок пружины полностью накопил механическую энергию, когда пружины растянуты до максимального положения, что происходит, когда элемент 54 качения контактирует с приводным роликом при его максимальном диаметре R.
Согласно одному из вариантов осуществления, максимальный радиус приводного ролика принимает значения в пределах от 80 мм до 120 мм, предпочтительно 105 мм, а его минимальный радиус принимает значения в пределах от 50 мм до 80 мм, предпочтительно 60 мм. Разность между максимальным радиусом R и минимальным радиусом r может составлять от 30 мм до 60 мм, предпочтительно 45 мм.
Согласно одному из вариантов осуществления, сила, прилагаемая элементом качения к приводному ролику, составляет от 1000 Н до 1500 Н, а скорость вращения приводного ролика настроена так, чтобы варьироваться от 0 до 25 рад/с. Время от старта до остановки приводного ролика может, в этом случае, составлять 0,2 сек.
На фигурах элемент качения выполнен в виде валика, образованного шарикоподшипниками, что обеспечивает низкое трение и большую поверхность контакта с периметром приводного ролика. Согласно одному из вариантов осуществления валик является игольчатым подшипником.
Как вариант, элемент качения может быть выполнен в виде сферического шара, закрепленного с возможностью вращения в раме шара. Чтобы минимизировать поверхностное давление на периметр приводного валика, в данном случае целесообразно придать его поперечному сечению соответствующую кругообразную форму.
Устройство надлежащим образом окружено трансформаторным маслом, которое служит как для смазывания, так и для охлаждения механических компонентов, входящих в устройство.
Способ передачи приводного движения может быть подытожен в следующих шагах:
а) элемент 54 качения сообщает приводному ролику 30 вращательное движение, на протяжении перемещения элемента качения от максимального радиуса R приводного ролика к минимальному радиусу r приводного ролика, при этом передавая вращательное движение на приводной вал 2а и ведомый элемент 2,
b) вращательное движение приводного ролика 30 тормозится до нуля, в то время как кинетическая энергия приводного ролика 30 передается блоку 51 растягиваемой/сжимаемой пружины,
c) приводной ролик 30 сохраняет состояние неподвижности с помощью храпового механизма 6, который посредством храповой шестерни предотвращает изменение направления вращения приводного ролика,
d) входной приводной вал 1а сообщает приводному ролику 30 вращательное движение посредством оси 3а вращения, в то время как элемент качения движется от неподвижного положения приводного ролика до момента, когда максимальный радиус R приводного ролика достигнет элемента качения, при этом немедленно начинается шаг а).
Объем охраны изобретения не ограничен представленными вариантами осуществления, а включает варианты осуществления, очевидные для специалиста в данной области. Например, устройство может быть погружено в жидкий диэлектрик со свойствами, аналогичными свойствам трансформаторного масла.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2006 |
|
RU2367047C1 |
| ТРАНСМИССИЯ С БЕССТУПЕНЧАТЫМ ИЗМЕНЕНИЕМ СКОРОСТИ | 2000 |
|
RU2267671C2 |
| УСТРОЙСТВО СИНХРОННОЙ РЕГУЛИРОВКИ | 2021 |
|
RU2809041C1 |
| ОРТОПЕДИЧЕСКОЕ ТЕХНИЧЕСКОЕ УСТРОЙСТВО | 2007 |
|
RU2459596C2 |
| ПЕРЕКЛЮЧАТЕЛЬ ШУНТИРУЮЩЕГО СОПРОТИВЛЕНИЯ, СПОСОБ УПРАВЛЕНИЯ ТАКИМ ПЕРЕКЛЮЧАТЕЛЕМ И ИСПОЛЬЗОВАНИЕ ТАКОГО ПЕРЕКЛЮЧАТЕЛЯ | 2005 |
|
RU2345437C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2602164C2 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ БЛОКИРОВКИ | 2009 |
|
RU2399736C1 |
| ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2486390C1 |
| ТРОЛЛЕЙБУС С ЧАСТИЧНОЙ НЕЗАВИСИМОСТЬЮ ОТ КОНТАКТНОЙ СЕТИ | 2012 |
|
RU2493027C1 |
| Бесступенчатый привод транспортного средства | 2020 |
|
RU2737407C1 |


Изобретение относится к устройству для передачи вращательного движения. Устройство для передачи вращательного движения содержит узел преобразования движения, включает промежуточный элемент (3), соединенный с осью (3а) вращения с возможностью вращения вокруг нее, узел (5) накопления механической энергии в виде пружинного устройства, блок растягиваемой/сжимаемой пружины, соединенный с неподвижным хомутом и с подвижным хомутом, и средства передачи накопленной в пружинном устройстве механической энергии ведомому элементу (2) через приводной вал (2а), при этом промежуточный элемент (3) содержит кулачковый приводной ролик, взаимодействующий с узлом (5) накопления энергии. Подвижный хомут снабжен элементом качения, контактирующим с периметром приводного ролика. Подвижный хомут может быть выполнен с возможностью передвижения в радиальном направлении параллельно плоскости приводного ролика. Способ передачи вращательного движения элементу включает передачу приводному валу накопленной в пружинном устройстве механической энергии. Применение предложенного устройства для передачи вращательного движения осуществляется с возможностью управления контактами переключателя обмоток под нагрузкой в трансформаторе или стабилизаторе. Техническим результатом является обеспечение улучшения использования передачи вращательного движения. 3 н. и 12 з.п. ф-лы, 6 ил.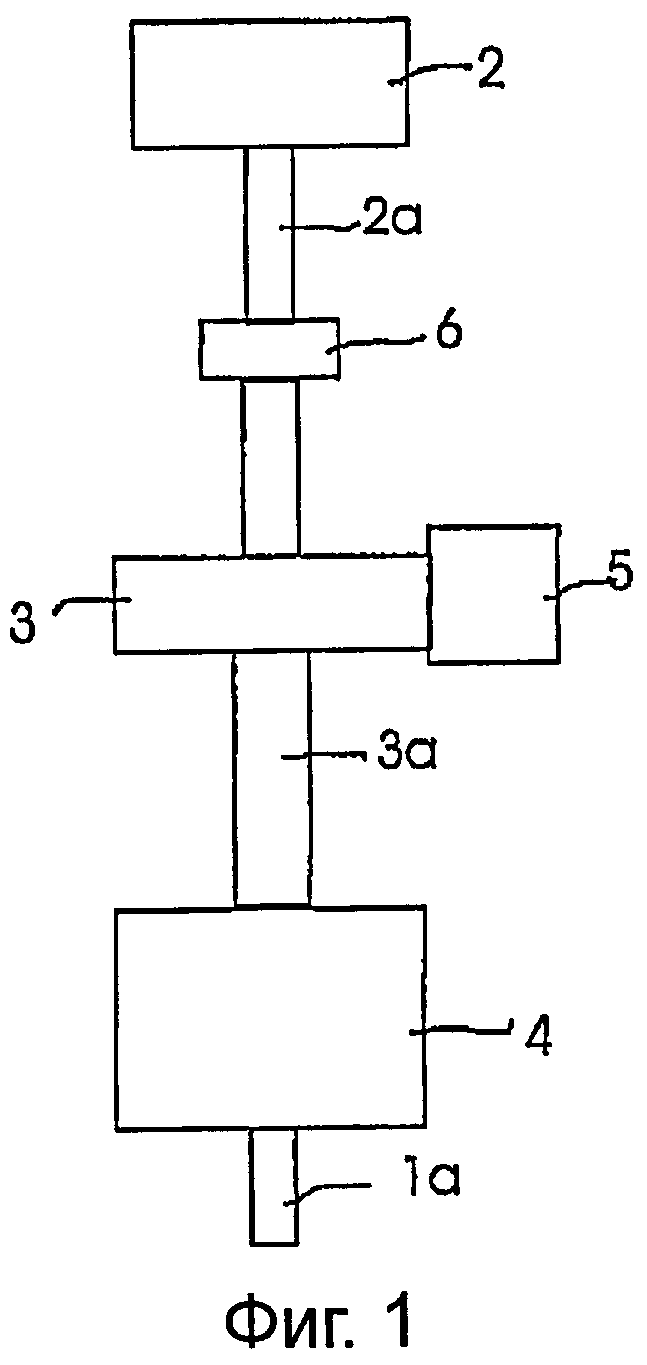
1. Устройство для передачи вращательного движения элементу (2), приводимому в движение вокруг приводного вала (2а), посредством узла преобразования движения, включающее промежуточный элемент (3), соединенный с осью (3а) вращения с возможностью вращения вокруг нее, узел (5) накопления механической энергии в виде пружинного устройства, выполненного с возможностью получения энергии от оси (3а) вращения и содержащего блок (51) растягиваемой/сжимаемой пружины, соединенный с неподвижным хомутом (52) и с подвижным хомутом (53), и средства передачи накопленной в пружинном устройстве механической энергии ведомому элементу (2) через приводной вал (2а), при этом промежуточный элемент (3) содержит кулачковый приводной ролик (30), взаимодействующий с узлом (5) накопления энергии, отличающееся тем, что подвижный хомут (53) снабжен элементом (54) качения, контактирующим с периметром приводного ролика (30).
2. Устройство по п.1, отличающееся тем, что подвижный хомут (53) выполнен с возможностью передвижения в радиальном направлении параллельно плоскости приводного ролика (30), причем длина хода указанного подвижного хомута равна R-r, блок (51) растягиваемой/сжимаемой пружины выполнен с возможностью получения энергии от приводного ролика при перемещении подвижного хомута (53) из положения с минимальным радиусом r в положение с максимальным радиусом R, а блок (51) растягиваемой/сжимаемой пружины выполнен с возможностью возвращения энергии приводному ролику при перемещении подвижного хомута (53) из положения с максимальным радиусом R в положение с минимальным радиусом r.
3. Устройство по п.1 или 2, отличающееся тем, что содержит храповый механизм (6), обеспечивающий вращательное движение приводного ролика (30) в одном направлении.
4. Устройство по п.1 или 2, отличающееся тем, что ось (3а) вращения выполнена с возможностью приведения от попеременного вращательного движения входного приводного вала (1а), при этом устройство содержит узел (4) преобразования движения, выполненный с возможностью преобразования попеременного вращательного движения входного приводного вала (1а) в однонаправленное вращательное движение оси (3а) вращения.
5. Устройство по п.1 или 2, отличающееся тем, что приводной ролик (30) имеет угол между максимальным радиусом R и минимальным радиусом r приводного ролика (30), находящийся в промежутке от 220° до 270°, предпочтительно 240°.
6. Устройство по п.1 или 2, отличающееся тем, что элемент (54) качения выполнен с возможностью осуществления контакта с приводным роликом с силой пружины, находящейся в промежутке от 1000 до 1500 Н.
7. Устройство по п.1 или 2, отличающееся тем, что промежуточный элемент (3) и узел (5) накопления энергии образуют единый компонент.
8. Устройство по п.1 или 2, отличающееся тем, что входной приводной вал (1а) и приводной вал (2а) параллельны.
9. Устройство по п.1 или 2, отличающееся тем, что ведомый элемент (2) механически соединен со средствами управления контактами переключателя обмоток под нагрузкой в трансформаторе или стабилизаторе.
10. Применение устройства, охарактеризованного в любом из пп.1-9, для передачи вращательного движения от ведущего элемента к ведомому элементу, причем ведомый элемент выполнен с возможностью управления контактами переключателя обмоток под нагрузкой в трансформаторе или стабилизаторе.
11. Способ передачи вращательного движения элементу (2), приводимому в движение приводным валом (2а), от промежуточного элемента (3), соединенного с осью (3а) вращения с возможностью вращения вокруг нее, путем передачи механической энергии от оси (3а) вращения к узлу (5) накопления механической энергии в виде пружинного устройства, и путем передачи приводному валу (2а) накопленной в пружинном устройстве механической энергии, при этом передачу механической энергии узлу накопления энергии и от указанного узла производят с помощью промежуточного элемента (3), выполненного в виде вращающегося кулачкового приводного ролика (30), отличающийся тем, что указанный приводной ролик (30) приводит в движение элемент (54) качения или сам приводится в движение указанным элементом качения, механически соединенным с подвижным концом пружинного устройства, выполненного в виде блока (51) растягиваемой/сжимаемой пружины.
12. Способ по п.11, отличающийся тем, что включает следующие функциональные шаги:
a) сообщение элементом (54) качения вращательного движения приводному ролику (30) во время перемещения элемента качения от максимального радиуса R приводного ролика к минимальному радиусу г приводного ролика, с передачей вращательного движения на приводной вал (2а) и ведомый элемент (2),
b) торможение вращательного движения приводного ролика (30) до нуля во время передачи кинетической энергии приводного ролика (30) блоку (51) растягиваемой/сжимаемой пружины,
c) обеспечение неподвижного состояния приводного ролика (30) с помощью храпового механизма (6), который посредством храповой шестерни предотвращает изменение направления вращения приводного ролика,
d) сообщение осью (3а) вращения приводному ролику (30) вращательного движения во время движения элемента качения от неподвижного положения приводного ролика до момента, когда максимальный радиус R приводного ролика достигнет элемента качения, при этом немедленно начинают выполнение шага а).
13. Способ по п.11 или 12, отличающийся тем, что входной приводной вал (1а) приводит в движение ось (3а) вращения посредством узла (4) преобразования движения, который преобразует попеременное вращательное движение входного приводного вала (1а) в однонаправленное вращательное движение.
14. Способ по п.12, отличающийся тем, что шаги а) - b) выполняют в пределах интервала времени порядка 0,2 с.
15. Способ по п.11 или 12, отличающийся тем, что ведомый элемент (2) управляет контактами переключателя выходных обмоток под нагрузкой в трансформаторе или стабилизаторе.
| Устройство для подсчета числа нулей в двоичном коде | 1984 |
|
SU1241232A2 |
| Устройство механической блокировки реверсирующих контакторов | 1988 |
|
SU1698909A1 |
| ПЕРЕКЛЮЧАТЕЛЬ ШУНТИРУЮЩЕГО СОПРОТИВЛЕНИЯ, СПОСОБ УПРАВЛЕНИЯ ТАКИМ ПЕРЕКЛЮЧАТЕЛЕМ И ИСПОЛЬЗОВАНИЕ ТАКОГО ПЕРЕКЛЮЧАТЕЛЯ | 2005 |
|
RU2345437C2 |
| WO 8908924 A1, 21.09.1989 | |||
| DE 19501529 C1, 20.06.1996. | |||

