Изобретение относится к области машиностроения и может быть использовано, например, в транспортном машиностроении. Более конкретно изобретение относится к элементам трансмиссии транспортных средств различного рода назначения, где необходимо предусмотреть, обеспечение раздачи мощности от одного входного на два либо четыре выходных вала, с возможностью кратковременного различия частоты вращения каждого из выходных валов, в зависимости от внешних факторов воздействия, по средствам проскальзывания. Наличие бесступенчатого регулирования частоты вращения выходных валов, позволяет применить данную модель в более обширных отраслях.
Из уровня техники известен «Бесступенчатый привод транспортного средства» по патенту РФ № 2086429 от 09.08.1995 (МПК B60K 17/32). Бесступенчатый привод автомобиля, содержащий два клиноременных вариатор и два редуктора, каждые из которых установлены на отдельных валах, каждый ведомый шкив клиноременной передачи кинематически связан с редуктором, связанным кинематически с валом колеса, а ведущие шкивы клиноременной передачи установлены на едином валу, отличающийся тем, что единый вал является валом двигателя, а кинематическая связь ведомого шкива клиноременной передачи выполнена посредством нагрузочной муфты и установлена на валу редуктора, который связан вертикальным валом с главной передачей для передачи усилия на колесо.
Также из уровня техники известен «Способ управления трансмиссией транспортного средства» по патенту РФ № 2340472 от 18.10.2006 (МПК B60K 17/342, B60W 10/00). Способ управления трансмиссией транспортного средства посредством изменения скоростных соотношений и распределения соотношений крутящих моментов по различным ветвям потоков мощности трансмиссии, имеющей силовую установку с электронным блоком управления ею, агрегат, позволяющий разрывать, трансформировать и отводить из трансмиссии часть потока мощности, переключатель режима движения, раздаточную коробку, электронный блок управления трансмиссией, карданные или другие передачи, способные передавать вращательное движение на расстоянии, соединяющие между собой агрегаты трансмиссии, вариаторы с гибкими металлическими элементами и устройствами изменения радиуса обкатки шкивов вариаторов, датчики измерения частоты вращения ведущих шкивов вариаторов, датчик измерения частоты вращения выходного вала силовой установки, межосевые дифференциалы, датчик положения педали подачи топлива, движители, отличающийся тем, что осуществляют индивидуальное изменение скоростного соотношения и распределения крутящих моментов между отдельными движителями транспортного средства, при этом раздаточная коробка передает крутящий момент от силового агрегата к трансмиссионным модулям, причем если трансмиссия имеет количество ведущих осей более одной, то раздаточная коробка может иметь одну или большее количество ступеней, которые могут включать в себя дифференциалы с устройствами их блокировки, реверсивные редукторы, механизмы отбора мощности, датчики, регистрирующие режимы работы раздаточной коробки, дифференциалы, механизмы, управляющие режимами работы раздаточной коробки, двух или большего количества движителей, а каждый трансмиссионный модуль состоит из центрального проходного редуктора с дифференциалом и устройством для дистанционной блокировки этого дифференциала, двух предохранительных муфт, двух вариаторов с металлическими гибкими элементами с устройствами изменения радиуса обкатки ведущих шкивов, двух дополнительных редукторов, двух полуосей, двух колесных редукторов, двух датчиков измерения крутящего момента, расположенных между центральным редуктором и движителем, двух датчиков частоты вращения ведущего шкива вариатора, расположенных перед ведущим шкивом вариатора, и двух датчиков частоты вращения движителя, причем крутящий момент подводится к входному валу центрального редуктора, где ведущие элементы предохранительных муфт соединены с каждым из двух выходных валов последнего, а на их ведомых элементах установлены ведущие шкивы вариаторов, а ведомые шкивы вариаторов передают крутящий момент через дополнительные редукторы к колесным редукторам посредством полуосей, далее к движителям, а изменение радиуса обкатки каждого шкива вариатора задается электронным блоком управления трансмиссией, обрабатывающим сигнал от датчика положения педали подачи топлива, датчиков измерения крутящего момента, датчиков скорости вращения двигателя и колес транспортного средства, датчиков частоты вращения ведущих шкивов вариаторов, датчиков продольных и поперечных ускорений автомобиля, датчика измерения угла поворота рулевого колеса.
Очевидно, что представленных аналогах главное направление, не только наличие ступенчатой передачи в транспортном средстве, но и отказ от дифференциала, т.е. персональная подача мощности на каждое колесо. Транспортное средство, с данными системами распределения мощности, в разы превосходит модель с дифференциалом по проходимости, т.к. последний, из двух колес, вращает только одно, с меньшим сопротивлением. Данные патенты, исключают такое неравномерное распределение тяги, но так же имеют серьезные недостатки. Каждое ведущее колесо снабжается полноценным вариатором, т.е. для полноприводного 4-колесного автомобиля, необходимо произвести четыре полноценных вариатора, а это четыре корпуса, четыре ремня, четыре блока управления вариатором и.т.д. Представленное изобретение объединяет все четыре устройства в одно целое. В зависимости от выбранной конфигурации, возможно изготовление вариатора с одним входным и четырьмя выходными валами с одним корпусом, одним ремнем, одним блоком управления вариатора и меньшим количеством конусных роликов. Независимые соосные выходные валы, позволили создать единый вариатор с раздельно выдаваемой мощностью для каждого колеса, более компактный и менее затратный в производстве на единицу продукции. Изобретение позволяет исключить дифференциал. Кроме того, дополнительная, двухступенчатая, пониженная передача каждого выходного вала, за счет оптимального крутящего момента обеспечит транспортному средству характеристики высоко проходимого внедорожника со всеми блокировками, что очень востребовано при экстремальном вождении по бездорожью.
Задача, которую поставил перед собой разработчик нового бесступенчатого привода транспортного средства лишенного недостатков известных приводов. Технический результат заключается в обеспечении индивидуального распределения соотношения крутящих моментов между отдельными колесами транспортного средства. Также технический результат заключается в обеспечении возможности регулирования угловой скорости и подводимого крутящего момента каждого колеса в отдельности. Кроме того, технический результат заключается в расширении функциональных возможностей управления трансмиссией, повышении КПД, при снижении трудоемкости управления бесступенчатой трансмиссией транспортного средства. Данный технический результат достигается за счет всей совокупности существенных признаков.
Изобретение пояснено графически, где:
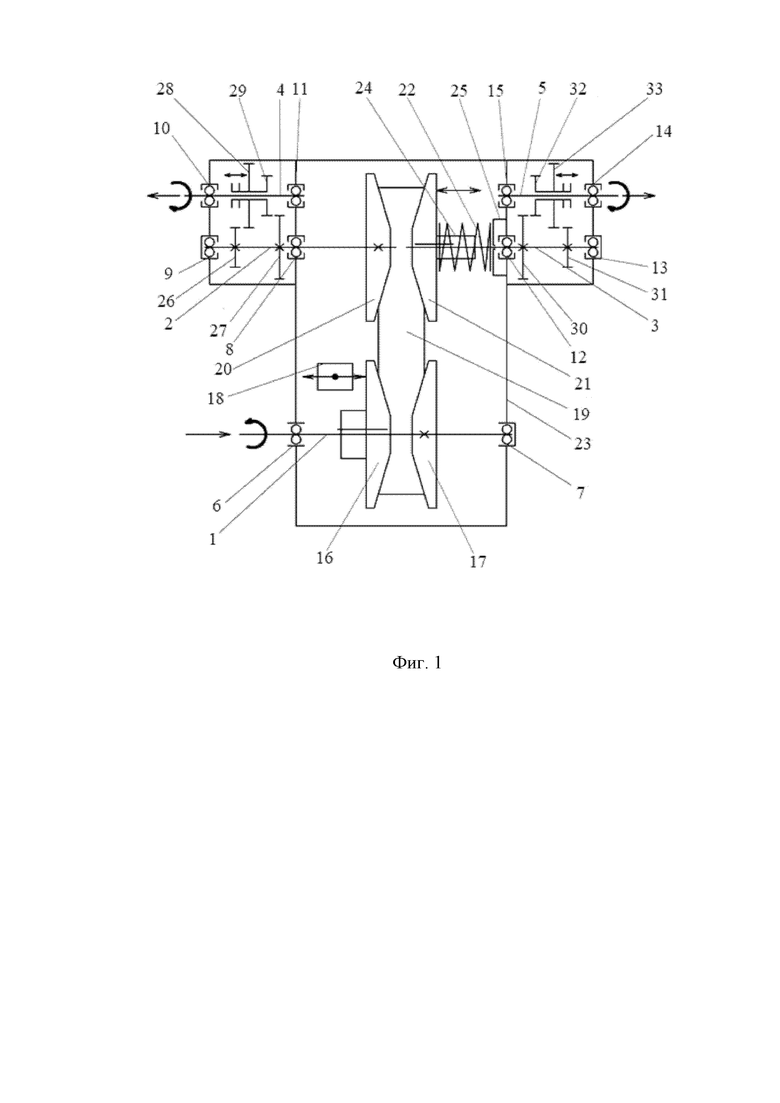
на фиг. 1. – показана кинематическая принципиальная схема механизма бесступенчатой коробки передач с дополнительным ступенчатым регулированием частоты вращения для двух выходных валов;
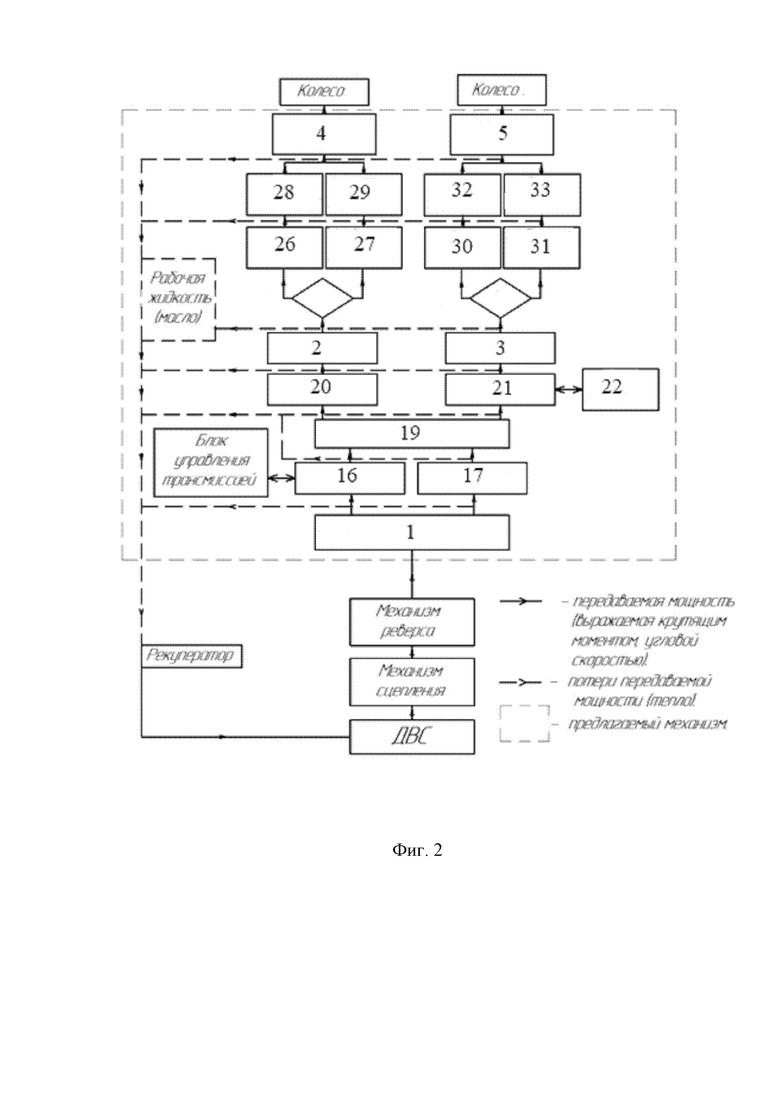
на фиг. 2 – схематично показан принцип передачи мощности через бесступенчатую коробку передач на два выходных вала;
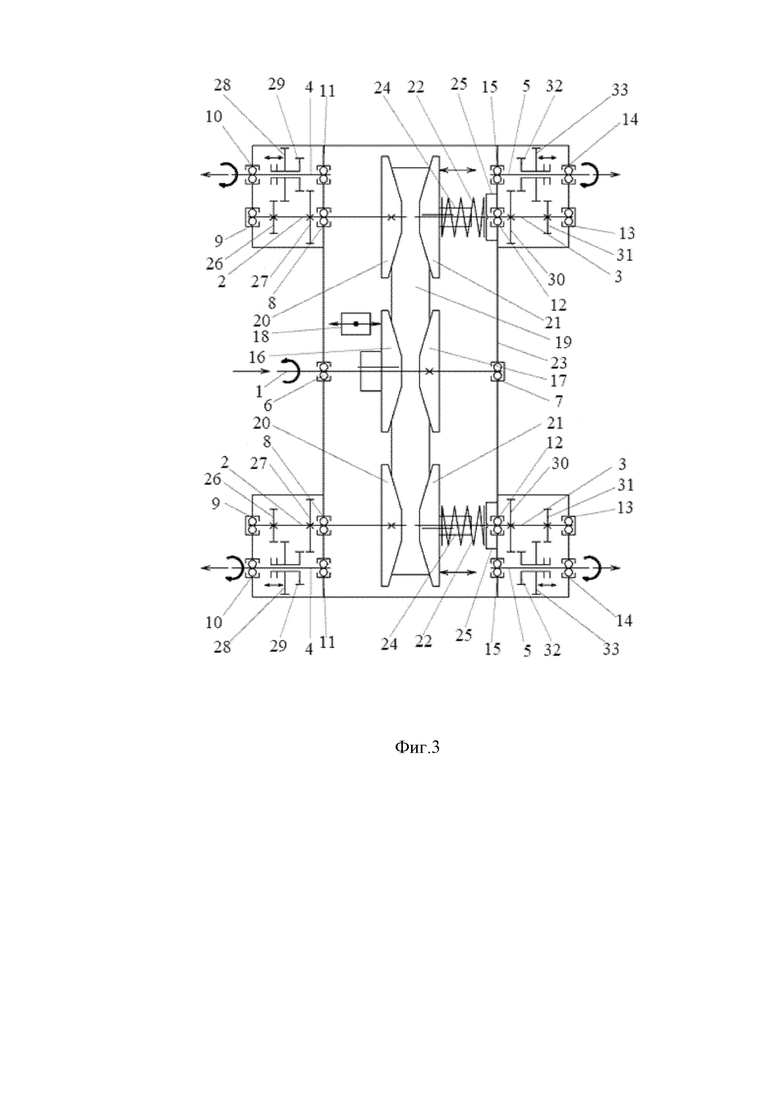
на фиг. 3 – схематично показан принцип передачи мощности через бесступенчатую коробку передач на четыре выходных вала;
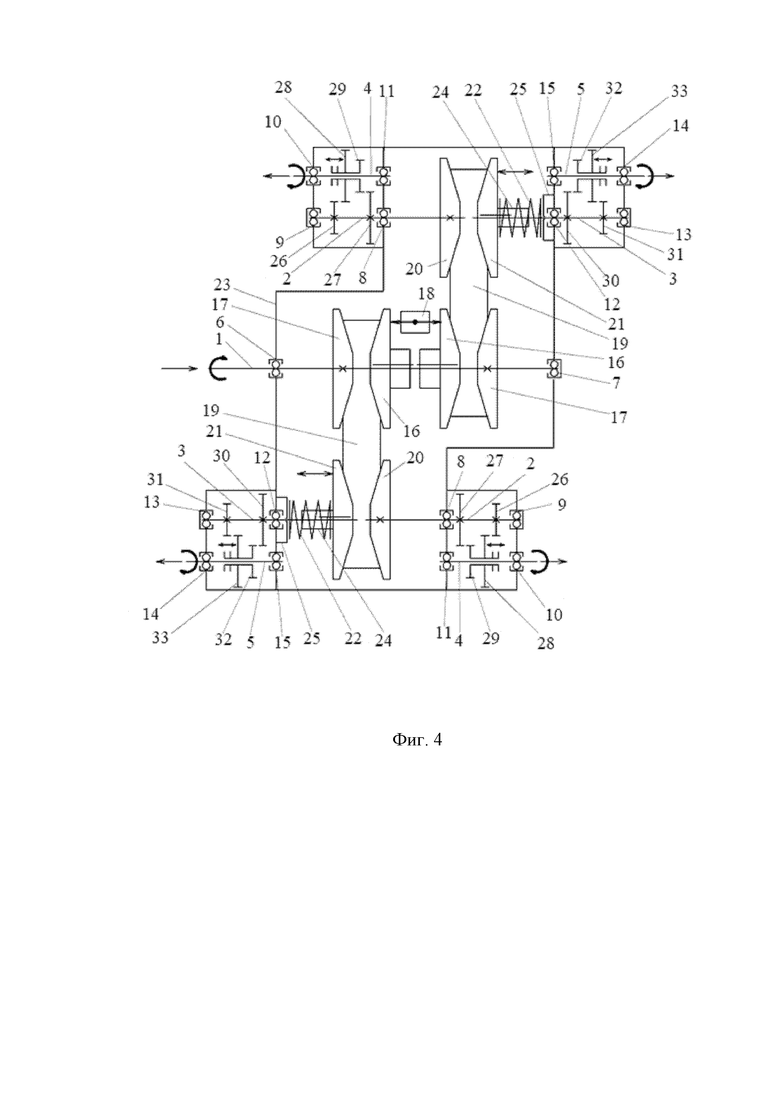
на фиг. 4 – схематично показан принцип передачи мощности через бесступенчатую коробку передач на четыре выходных вала с помощью двух вариативных ременных передач, объединённых одним блоком управления трансмиссией и входным валом.
Сущность изобретения состоит в том, что бесступенчатый привод транспортного средства состоит из геометрически параллельно расположенных друг другу валов входного, двух соосных промежуточных, с которыми жестко связаны зубчатые колеса, и двух соосных выходных, расположенных в одной плоскости и закрепленных в корпусе с помощью подшипников качения, на входном валу расположены два конических ролика, зеркально расположенных относительно друг друга, причем один ролик жестко связан с валом, а другой ролик выполнен с возможностью свободного перемещения вдоль оси вала и связан с ним через подвижное шпоночное либо шлицевое соединение, блока управления трансмиссией жестко связанного с корпусом бесступенчатого привода либо с входным валом, причем между двумя коническими поверхностями роликов расположен ремень, который натянут с помощью, роликов, расположенных на двух независимых соосных промежуточных валах, причем один из роликов жестко соединен с своим промежуточным валом, а другой выполнен с возможностью свободного перемещения вдоль оси другого промежуточного вала и связан с ним через подвижное шпоночное либо шлицевое соединение, а также блока пружин для натяжения ремня в статическом положении, конические поверхности роликов на промежуточных валах выполнены с возможностью передачи усилия сжатия блока пружин ремню, причем конечный ход подвижного ролика на промежуточном валу при его разведении ограничен упором, взаимодействующим со стопором, жёстко связанным с корпусом бесступенчатого привода, расстояние между упором и стопором выполнено таким образом, что при максимально разведенных роликах на промежуточных валах геометрическое сечение ремня, не проваливается на ось вращения валов, причем двусторонние радиально-упорные подшипники качения выполнены с возможностью обеспечения осевого перемещение всех валов относительно корпуса бесступенчатого привода, на выходных валах расположены подвижные в осевом направлении блоки зубчатых колес связанные с валом через подвижное шпоночное либо шлицевое соединение, причем блоки зубчатых колес на выходном валу выполнены с возможностью попеременной работы с зубчатыми колесами на промежуточном валу, причем конические ролики с ремнем, расположенные на входном и промежуточных валах и блок управления трансмиссией образуют ременной вариатор и погружены в рабочую жидкость. Вместе с тем, силовая часть блока управления трансмиссией выполнена в виде механического либо электрического, либо пневматического, либо комбинированного привода прямолинейного движения. А привод прямолинейного движения выполнен с ручным либо автоматическим управлением.
Бесступенчатый привод транспортного средства состоит из геометрически параллельно расположенных друг другу валов: входного вала 1, двух соосных промежуточных валов 2 и 3, и двух соосных выходных валов 4 и 5, расположенных в одной плоскости и закрепленных в корпусе описываемого механизма с помощью подшипников качения 6-15. На валу 1 расположены два конических ролика 16 и 17, зеркально расположенных относительно друг друга. Ролик 17 жестко связан с валом 1. Ролик 16 связан с валом 1 через подвижное шпоночное либо шлицевое соединение, обеспечивающее его свободное перемещение вдоль оси вала 1. Перемещение ролика 16 вдоль оси вала 1 осуществляется блоком управления трансмиссией 18 который жестко связан на выбор, или с корпусом 23, или с валом 1, в зависимости от конструкции. Силовая часть блока управления трансмиссией 18 может быть выполнена в виде механического, электрического, гидравлического (пневматического) либо комбинированного привода прямолинейного движения, управляемого в ручном либо в автоматическом режимах. Между двумя коническими поверхностями роликов 16 и 17 находится ремень 19, который натянут с помощью аналогичных роликов 20 и 21, расположенных на промежуточных валах 2 и 3 соответственно. Ролик 20 жестко связан с валом 2. Ролик 21 связан с валом 3 через подвижное шпоночное либо шлицевое соединение, обеспечивающее его свободное перемещение вдоль оси вала 3. В статическом положении натяжение ремня осуществляется с помощью блока пружин 22, передающего усилие сжатия подвижному ролику 21. Конические поверхности роликов 20 и 21 передают усилие сжатия блока пружин 22 ремню 19. Равнодействующая сил, действующих на ремень со стороны роликов, стремится вытолкнуть профиль ремня 19 в радиальном направлении и тем самым обеспечивает его предварительное натяжение в статическом положении между парами роликов 16, 17 и 20, 21. Конечный ход ролика 21 вдоль оси вала 3 при его разведении ограничивается упором 24, взаимодействующим с стопором 25. Стопор 25 жёстко связан с корпусом 23. За счет расстояния между упором 24 и стопором 25 должно выполняться следующее условие: при максимально разведенных роликах 20 и 21 геометрическое сечение ремня, не может оказаться на оси вращения валов (то есть исключается возможность «проваливания» ремня между роликами). Осевое перемещение всех валов относительно корпуса 23 ограничивается двусторонними радиально-упорными подшипниками качения 6-15 (либо иными аналогичными устройствами). На валу 2 расположены жестко связанные с ним зубчатые колеса 26 и 27. На валу 4 расположен подвижный в осевом направлении блок зубчатых колес 28 и 29, который связан с валом 4 через подвижное шпоночное либо шлицевое соединение. Блок зубчатых колес 28 и 29 работает попеременно с зубчатыми колесами 26 и 27 соответственно, аналогично работе двухступенчатой коробки скоростей. Таким же образом взаимодействуют зубчатые колеса 30 и 31, жестко связанные с валом 3, с подвижным блоком соответствующих зубчатых колес 32 и 33, расположенных на валу 5. Зубчатые передачи 27-29, 26-28, 30-32 и 31-33 является дополнительной опцией. Их применение не обязательно, и служат лишь для обеспечения оптимального крутящего момента или угловой скорости выходных валов в зависимости от условий эксплуатации (характера нагрузки). В случае их отсутствия, промежуточные валы 2 и 3 являются выходными. По результатам эксплуатации либо конструктивным исполнениям бесступенчатый вариатор (дет. поз. 16, 17, 18, 19, 20 и 21 кинематической схемы фиг. 1) может оснащаться механизмом натяжения и направления ремня. Весь механизм вариатора погружен в рабочую жидкость (масло) и в случае ее перегрева в процессе эксплуатации может оснащаться дополнительным насосом, фильтром, теплообменным аппаратом с внешней средой или рекуперативным элементом, и соответствующей гидроаппаратурой. Кинематическая схема, изображенная на фиг.1, очень схожа с схемой классического клиноременного вариатора с параллельно включенными в кинематическую схему двумя двухступенчатыми коробками скоростей на выходном валу. Ключевым отличием кинематической схемы от аналогов является то, что конические ролики 20 и 21 ременного вариатора расположены на двух независимых соосных валах 2 и 3 соответственно и механически между собой не связаны.
Работает бесступенчатый привод транспортного средства следующим образом. При помощи двигателя (двигатель внутреннего сгорания или электродвигатель) создают на выходном валу мощность, определяемую крутящим моментом и угловой скоростью его вращения. Далее через механизмы трансмиссии (механизм сцепления, механизм реверса и другие элементы) мощность передают на входной вал 1. От входного вала 1 и закрепленных на нем роликов 16 и 17 мощность передают ремню 19. От ремня 19 мощность передают на два ответных конических ролика 20 и 21 вариаторной передачи, закрепленных на отдельных валах 2 и 3 соответственно. Передачу энергии ремнем осуществляют за счет сил предварительного натяжения и контактных сил трения. Бесступенчатую регулировку угловой скорости вращения, а также передаваемого крутящего момента валам 2 и 3 осуществляют с помощью блока управления трансмиссией 18, которым перемещают ролик 16 вдоль оси вала 1 с возможностью его фиксации в заданной точке. Изменение зазора между роликами 16 и 17 приведёт к изменению эффективного диаметра зацепления ремня 19 с конусными поверхностями роликов, тем самым изменив передаточное отношение ременной передачи. При сведении роликов 16 и 17 ролики 20 и 21 автоматически разводятся и наоборот. Это осуществляют за счет того, что длина ремня 19 постоянна и подвижный ролик 21, расположенный на валу 3, взаимодействует с блоком пружин сжатия 22. Далее, мощность от вала 2 и вала 3, через зубчатые колеса двухступенчатых коробок скоростей (опционально) передают на выходные валы 4 и 5. От выходных валов 4 и 5 механическую энергию через последующие элементы трансмиссии передают к приводным колёсам, которые приводят транспортное средство в движение. При условиях, определяемых величиной и характером нагрузки на приводных колёсах, их угловая скорость вращения может отличаться друг от друга. В этом случае, ролики 19 и 20 также будут иметь разную угловую скорость вращения. За счет того, что весь механизм вариатора погружен в масло и ролики 16 и 17 закреплены на разных валах 2 и 3 соответственно, у роликов 16 и 17 есть возможность скольжения относительно тела ремня 19. Потери мощности на трение между ремнём 19 и роликами 16 и 17 будут выделяться в виде тепла (разогрева масла). Использование современных рекуперативных систем позволяет вернуть часть этих потерь, носителем и аккумулятором которых является масло, обратно в трансмиссию, либо отдать их в окружающую среду (через теплообменный аппарат) с целью охлаждения масла и всего механизма. Используя вышеизложенный принцип раздачи мощности на два выходных вала, можно составить схему для раздачи мощности на четыре выходных вала, которая показана на фиг.3. Для сокращения описания механизма, представленного на фиг. 3, позиции аналогичных элементов схемы повторяются в зеркальном отражении относительно оси вала 1 и полностью идентичны друг другу, как в геометрическом исполнение, так и в взаимодействие. Отличие состоит лишь в том, что ремень 19 взаимодействует одновременно с парами роликов 16-17 и с обоими парами роликов 20-21 и используется один общий блок управления трансмиссией 18. Принцип работы каждой из ветвей полностью аналогичен вышеописанному механизму раздачи мощности на два выходных вала. С целью повышения передаваемой мощности выходным валам и снижения износа ремня 19 передачу мощности четырём ведомым валам можно осуществить с помощью двух вариативных ременных передач, объединённых одним блоком управления трансмиссией 18 и входным валом 1. В этом случае блок управления трансмиссией осуществляет одинаковое перемещение обоих роликов в направлениях движения друг к друг или друг от друга. Принцип работы и элементы приведенной схемы также полностью аналогичны механизму, представленному на фиг. 1. В данном случае имеется возможность «V»-образного расположения выходных валов относительно входного вала. Подвод мощности к обоим ведущим роликам (фиг. 1, 3 и 4) перпендикулярно оси вращения вала 1 во всех перечисленных исполнениях механизма возможно осуществлять, например, с помощью комбинирования внешней торцевой поверхности ролика с телом ведомого колеса конической зубчатой передачи. В этом случае ведущая шестерня передачи располагается на входном валу, а вал 1 становится промежуточным. Тип комбинируемой передачи может быть выбран из любых доступных конструктивных решений. В кинематических схемах, представленных на фиг. 3 и 4, в зависимости от конструктивного исполнения (опционально), возможно использовать механизмы синхронизации линейного перемещения обоих роликов 21, что обеспечит одинаковый, управляемый, зазор между парами ведомых роликов 20-21, и, соответственно, одинаковую угловую скорость вращения выходных валов.
Изобретение относится к бесступенчатому приводу транспортного средства, где необходимо обеспечение раздачи мощности от одного входного на два либо четыре выходных вала, с возможностью кратковременного различия частоты вращения каждого из выходных валов. Бесступенчатый привод состоит из параллельно расположенных валов входного, двух соосных промежуточных, с которыми жестко связаны зубчатые колеса, и двух соосных выходных, расположенных в одной плоскости, и блока управления трансмиссией. На входном и промежуточном валах установлен ременный вариатор. На выходных валах расположены подвижные в осевом направлении блоки зубчатых колес, связанные с зубчатыми колесами на промежуточном валу. Достигается расширение функциональных возможностей управления трансмиссией, повышение КПД. 2 з.п. ф-лы, 4 ил.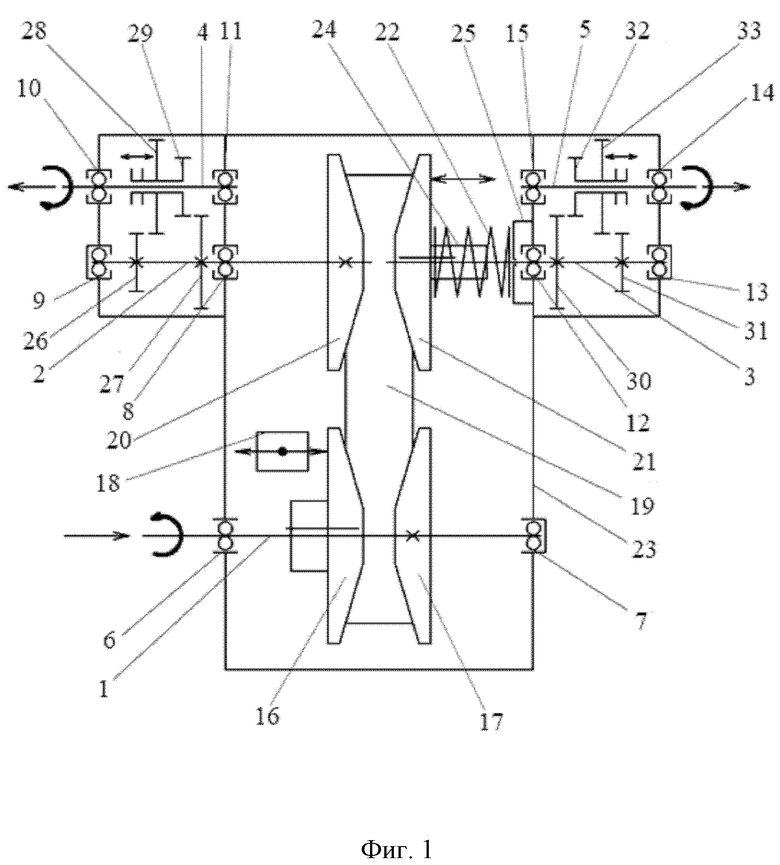
1. Бесступенчатый привод транспортного средства, состоящий из: геометрически параллельно расположенных друг другу валов - входного, двух соосных промежуточных, с которыми жестко связаны зубчатые колеса, и двух соосных выходных, расположенных в одной плоскости и закрепленных в корпусе с помощью подшипников качения, на входном валу расположены два конических ролика, зеркально расположенных относительно друг друга, причем один ролик жестко связан с валом, а другой ролик выполнен с возможностью свободного перемещения вдоль оси вала и связан с ним через подвижное шпоночное либо шлицевое соединение;
блока управления трансмиссией, жестко связанного с корпусом бесступенчатого привода либо с входным валом, причем между двумя коническими поверхностями роликов расположен ремень, который натянут с помощью роликов, расположенных на двух независимых соосных промежуточных валах, причем один из роликов жестко соединен со своим промежуточным валом, а другой выполнен с возможностью свободного перемещения вдоль оси другого промежуточного вала и связан с ним через подвижное шпоночное либо шлицевое соединение,
а также блока пружин для натяжения ремня в статическом положении, конические поверхности роликов на промежуточных валах выполнены с возможностью передачи усилия сжатия блока пружин ремню, причем конечный ход подвижного ролика на промежуточном валу при его разведении ограничен упором, взаимодействующим со стопором, жёстко связанным с корпусом бесступенчатого привода, расстояние между упором и стопором выполнено таким образом, что при максимально разведенных роликах на промежуточных валах геометрическое сечение ремня не проваливается на ось вращения валов, причем двусторонние радиально-упорные подшипники качения выполнены с возможностью обеспечения осевого перемещения всех валов относительно корпуса бесступенчатого привода, на выходных валах расположены подвижные в осевом направлении блоки зубчатых колес, связанные с валом через подвижное шпоночное либо шлицевое соединение, причем блоки зубчатых колес на выходном валу выполнены с возможностью попеременной работы с зубчатыми колесами на промежуточном валу, причем конические ролики с ремнем, расположенные на входном и промежуточных валах, и блок управления трансмиссией образуют ременной вариатор и погружены в рабочую жидкость.
2. Бесступенчатый привод транспортного средства по п. 1, отличающийся тем, что силовая часть блока управления трансмиссией выполнена в виде механического либо электрического, либо пневматического, либо комбинированного привода прямолинейного движения.
3. Бесступенчатый привод транспортного средства по п. 2, отличающийся тем, что привод прямолинейного движения выполнен с ручным либо автоматическим управлением.
| БЕССТУПЕНЧАТЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2086429C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340472C2 |
| Устройство для автоматического регулирования подачи горючей смеси в горелки котлоагрегата | 1989 |
|
SU1765626A1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ОСОБОВЫСОКОЙ ПРОХОДИМОСТИ | 2011 |
|
RU2570016C2 |
| JP 2006166572 A, 22.06.2006. | |||

