Изобретение относится к железнодорожному транспорту, а именно к способу регулирования электропередачи тепловоза с автономным тепловым двигателем, генератором переменного тока и электродвигателями постоянного тока.
Известен способ регулирования электрической передачи тепловоза посредством регулирования напряжения генератора тепловоза, заключающийся в том, что задают частоту вращения теплового двигателя, приводящего во вращение генератор, измеряют положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя, соответствующее текущему значению его частоты вращения, измеряют напряжение генератора, сравнивают его с величиной уставки и по величине рассогласования изменяют ток возбуждения генератора (Вилькевич Б.И. «Автоматическое управление электропередачей тепловозов. - М.: Транспорт, 1978 г., с.39-41, рисунок 30).
Недостатком известного способа является то, что при боксовании одной или нескольких осей колесных пар локомотива возбуждение генератора изменяют в зависимости от максимального тока одного из тяговых электродвигателей, имеющего в данный момент наименьшую склонность к боксованию, т.е. стабилизируют напряжение тягового генератора по максимальному току одного из тяговых электродвигателей.
При появлении даже на короткое время одновременного боксования всех колесных пар локомотива происходит срыв режима стабилизации напряжения тягового генератора и переход боксования в разносное.
Известен способ регулирования напряжения тягового генератора тепловоза, принятый за прототип, заключающийся в том, что задают частоту вращения теплового двигателя, приводящего во вращение тяговый генератор переменного тока, связанный с тяговыми электродвигателями постоянного тока, измеряют положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя, соответствующее текущему значению его частоты вращения, задают положение дозирующего органа топливоподачи регулятора частоты вращения и нагрузки пропорционально заданной частоте вращения, сравнивают его с измеренным положением, величину их рассогласования интегрируют по времени и принимают за величину уставки напряжения генератора (SU, авторское свидетельство №925693, кл. B60L 11/02, опублик. 1982 г.).
Недостатком известного способа является то, что напряжение тягового генератора при появлении боксования хотя бы у одного из тяговых электродвигателей увеличивается с темпом, определяемым интегратором задания напряжения тягового генератора, поскольку при этом суммарная мощность, подводимая к тяговым электродвигателям, снижается и появляется несоответствие между свободной мощностью теплового двигателя и мощностью, реализуемой тяговой передачей, что приводит к рассогласованию положения дозирующего органа топливоподачи регулятора частоты вращения и нагрузки теплового двигателя с заданным. В конечном итоге увеличение напряжения генератора способствует дальнейшему развитию боксования.
Другим недостатком известного способа является то, что напряжение генератора подается на все тяговые электродвигатели одинакового уровня независимо от того, принадлежит ли тяговый электродвигатель боксующей колесной паре или принадлежит небоксующей колесной паре.
Поддержание постоянным напряжения генератора, которое подводится к электродвигателям, не исключает возможности как одновременного боксования всех колесных пар тепловоза, так и нескольких, и при водит к тому, что мощность, подводимая к электродвигателям, уменьшается, а тяговые электродвигатели боксующих колесных пар могут продолжать боксовать, работая по естественной мягкой механической характеристике.
Указанные недостатки снижают тяговые свойства тепловоза при быстрых изменениях нагрузки (например, при боксовании) и ухудшают экономичность теплового двигателя.
Техническим результатом изобретения является повышение тяговых свойств тепловоза при быстрых изменениях нагрузки (например, боксовании) и экономичности теплового двигателя путем раздельного регулирования напряжения, подводимого к тяговым электродвигателям последовательного возбуждения, и формирования искусственных жестких скоростных характеристик тяговых электродвигателей, что позволяет исключить разносное боксование и ограничить величину скольжения колесных пар.
Указанный технический результат достигается тем, что в способе регулирования электрической передачи тепловоза, состоящего из одной и более секций, заключающемся в том, что задают частоту вращения тепловых двигателей, приводящих во вращение тяговые генераторы переменного тока, связанные с тяговыми электродвигателями, измеряют положение рейки дозирующего органа топливоподачи регулятора частоты вращения и нагрузки тепловых двигателей, соответствующее текущему значению частоты вращения тепловых двигателей, задают положение рейки дозирующего органа топливоподачи регулятора частоты вращения и нагрузки тепловых двигателей пропорционально заданной частоте вращения тепловых двигателей, сравнивают заданное положение рейки дозирующего органа топливоподачи регулятора частоты вращения и нагрузки тепловых двигателей с измеренным положением рейки дозирующего органа топливоподачи регулятора частоты вращения и нагрузки тепловых двигателей, величину их рассогласования интегрируют по времени и принимают за величину уставки напряжения тягового генератора переменного тока соответствующей секции, измеряют частоту вращения каждого тягового электродвигателя всех секций тепловоза, выделяют минимальную из измеренных частот вращения тяговых электродвигателей, величину минимальной частоты вращения тяговых электродвигателей суммируют со знаком минус с измеренными частотами вращения каждого тягового электродвигателя, результаты суммирования сравнивают с величиной заранее установленного порога, величину их рассогласования суммируют со знаком минус с уставкой напряжения тягового генератора переменного тока соответствующей секции, результаты суммирования принимают за уставки выходного напряжения управляемых выпрямителей, по которым осуществляют фазовое регулирование выходного напряжения управляемых выпрямителей, которое подают на вход тяговых электродвигателей.
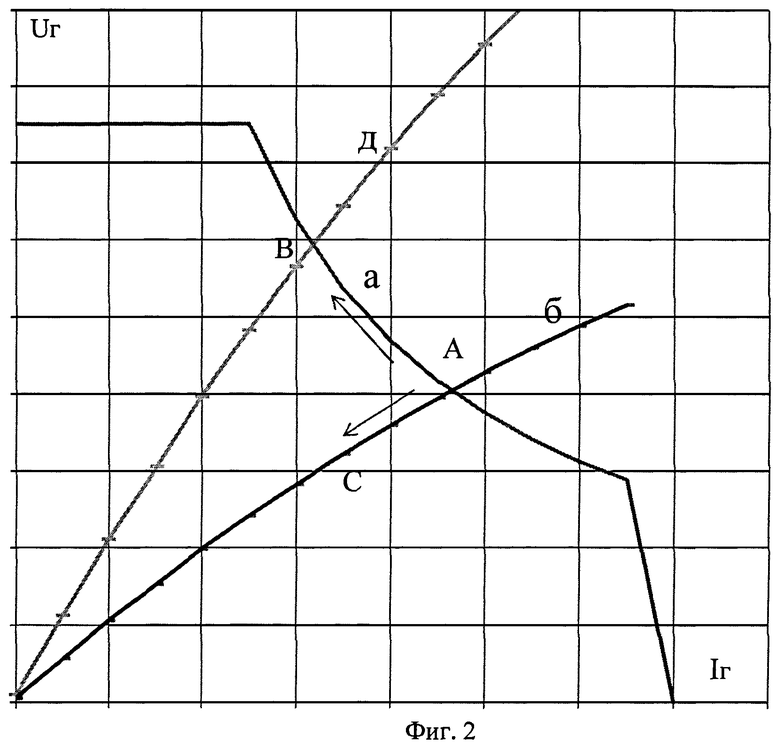
На фиг.1 представлена блок-схема устройства, реализующяя предлагаемый способ, на фиг.2 - внешняя характеристика тягового генератора Ur(Jr), с нанесенными на нее гиперболой постоянной мощности - кривая «а» и характеристиками тяговых электродвигателей для двух значений частоты вращения якорей тяговых электродвигателей, кривые «б» и «д».
Устройство (Фиг.1) на каждой секции состоит из теплового двигателя 1 с регулятором 2 частоты вращения и нагрузки, датчиком 3 положения рейки дозирующего органа топливоподачи регулятора 2 частоты вращения и нагрузки теплового двигателя 1, например, датчиком положения рейки насосов высокого давления (не показаны) теплового двигателя 1. Тепловой двигатель 1 связан с электрической передачей, в которую входит сам тепловой двигатель 1, соединенный с тяговым генератором 4 переменного тока. Силовой выход генератора 4 подключен через силовые входы управляемых выпрямителей 5 и 6 на входы тяговых электродвигателей 7 и 8 постоянного тока соответственно. Тяговый генератор 4 переменного тока соединен с выходом блока 9 управления током возбуждения. Тяговый электродвигатель 7 постоянного тока соединен с датчиком 10 частоты вращения, выход которого соединен с одним из входов сумматора 11. Тяговый электродвигатель 8 соединен с датчиком 12 частоты вращения, выход которого соединен с одним из входов сумматора 13. Выход задатчика 14 частоты вращения теплового двигателя 1, например, многопозиционного контроллера машиниста тепловоза, соединен с входом регулятора 2 частоты вращения и нагрузки теплового двигателя 1, с входом функционального преобразователя 15, формирующего по заданной частоте вращения теплового двигателя 1 задание положения дозирующего органа топливоподачи. Выход функционального преобразователя 15 соединен с одним из входов сумматора 16, на другой вход сумматора 16 подается со знаком минус выходной сигнал датчика 3 положения дозирующего органа топливоподачи. Выход сумматора 16 соединен с входом блока 17 интегрирования, формирующим задание напряжения тягового генератора 4 переменного тока, выход которого соединен с одним из входов блока 9 управления током возбуждения, другой вход блока 9 управления током возбуждения соединен с выходом датчика 18 напряжения тягового генератора 4 переменного тока.
Выход блока 17 интегрирования соединен с одними из входов сумматоров 19 и 20, выходы которых соединены соответственно через усилители 21 и 22 с управляющими входами управляемых выпрямителей 5 и 6, другие входы сумматоров 19 и 20 соединены с выходами пороговых элементов 23 и 24, соединенных своими входами с выходами соответственно сумматоров 11 и 13, на другие входы которых подаются сигналы с выхода блока 25 выделения минимальной частоты вращения тяговых электродвигателей 7 и 8, один из входов которого в свою очередь соединен с выходом блоков 25 выделения минимальной частоты вращения тяговых электродвигателей других секций тепловоза. Число пар «управляемый выпрямитель-тяговый электродвигатель», например, 5 и 7 или 6 и 8 и пар «сумматор-усилитель», например 21 и 19 или 22 и 20, в электрической тяговой передаче равно числу движущих колесных пар секции тепловоза, например двум, как в рассматриваемом устройстве на фиг.1.
Способ осуществляется следующим образом.
Контроллером 14 машиниста ведущей секции задают частоту вращения тепловых двигателей 1 всех секций, приводящих во вращение тяговые генераторы переменного тока, связанные с тяговыми электродвигателями 7 и 8. На выходе контроллера 14 машиниста действует кодовый сигнал, пропорциональный заданной частоте вращения теплового двигателя 1, который поступает на входы регуляторов 2 частоты вращения и нагрузки теплового двигателя 1 всех секций тепловоза и на входы функциональных преобразователей 15. На всех секциях тепловоза регуляторы 2 частоты вращения и нагрузки удерживают частоту вращения тепловых двигателей 1 пропорционально кодовому сигналу задания контроллера 14 машиниста, датчиком 3 положения рейки дозирующего органа топливоподачи измеряют положение рейки дозирующего органа топливоподачи регулятора 2 частоты вращения и нагрузки теплового двигателя 1, соответствующее текущему значению частоты вращения теплового двигателя 1. Выходной сигнал «Lи» датчика 3 положения дозирующего органа топливоподачи со знаком минус подают на один из входов сумматора 16.
Функциональным преобразователем 15 задают положение рейки дозирующего органа топливоподачи регулятора 2 частоты вращения и нагрузки пропорционально заданной частоте вращения теплового двигателя 1, для чего в функциональном преобразователе 15 преобразуют код заданной частоты вращения теплового двигателя 1, поступающий на вход функционального преобразователя 15 с выхода контроллера 14 машиниста ведущей секции в сигнал «L3» задания положения дозирующего органа топливоподачи, который с выхода функционального преобразователя 15 подают на другой вход сумматора 16, где сравнивают заданное положение рейки дозирующего органа топливоподачи регулятора 2 частоты вращения и нагрузки с измеренным положением рейки дозирующего органа топливоподачи регулятора 2 частоты вращения и нагрузки, с выхода которого величину рассогласования заданного и измеренного положения дозирующего органа топливоподачи ΔL=±(LЗ-LИ) интегрируют, для чего ее подают на вход блока 17 интегрирования, результат интегрирования принимают за величину уставки напряжения тягового генератора переменного тока 4 и с выхода блока 17 интегрирования подают на один из входов блока 9 управления током возбуждения тягового генератора, на другой вход которого подают сигнал с датчика 18 напряжения тягового генератора 4. Тяговый генератор переменного тока 4 возбуждается и на его выходе действует напряжение переменного тока, соответствующее заданному значению напряжения с выхода блока 17 интегрирования.
Уставку напряжения тягового генератора с выхода блока 17 интегрирования подают на одни из входов сумматоров 19 и 20, выходной сигнал которых усиливают в усилителях 21 и 22 и подают на соответствующие входы управления управляемых выпрямителей 5 и 6.
Измеряют частоты вращения каждого тягового электродвигателя всех секций тепловоза, сигналы, пропорциональные измеренным частотам вращения тяговых электродвигателей 7 и 8 соответствующих секций тепловоза, взятые со знаком «минус», подают на один из входов сумматоров 11 и 13, выделяют минимальную из измеренных частот вращения тяговых электродвигателей в блоке 25, для чего на один из входов блока 25 выделения минимальной частоты вращения тяговых электродвигателей каждой секции тепловоза подают сигналы с выходов датчиков 10 и 12 частоты вращения тяговых электродвигателей 7 и 8, на другие входы блока 25 выделения минимальной частоты вращения подают сигнал с выхода блока 25 выделения минимальной частоты вращения других секций тепловоза, полученный результат с выхода блока 25, пропорциональный минимальной частоте вращения всех тяговых электродвигателей всех секций тепловоза, сравнивают в сумматорах 11 и 13 с измеренными частотами вращения тяговых электродвигателей 7 и 8, для чего сигналы, пропорциональные измеренным частотам вращения тяговых электродвигателей 7 и 8 с выхода датчиков 10 и 12 частоты вращения подают на другие входы сумматоров 11 и 13. Выходные сигналы рассогласования измеренных частот вращения тяговых электродвигателей 7 и 8 и минимальной частоты вращения всех тяговых электродвигателей всех секций с сумматоров 11 и 13 подают через пороговые элементы 23 и 24, где сравнивают с величиной заранее установленного порога, по полученной величине рассогласования с выхода пороговых элементов 23 и 24 корректируют уставку напряжения тягового генератора, для чего сигнал с выхода пороговых элементов 23 и 24 со знаком минус подают на другие входы сумматоров 19 и 20. Результат суммирования в сумматорах 19 и 20 усиливают в усилителях 21 и 22 и принимают за уставки выходного напряжения управляемых выпрямителей 5 и 6.
По сигналам с выходов усилителей 21 и 22 осуществляют фазовое регулирование выходного напряжения управляемых выпрямителей 5 и 6, которое подают на вход тяговых электродвигателей 7 и 8.
Тяговые электродвигатели 7 и 8 под действием приложенного к ним выпрямленного напряжения вращаются с частотой, определяемой следующим выражением:
где n - частота вращения якоря тягового электродвигателя;
Uг - напряжение, приложенное к тяговому электродвигателю;
Iя - ток якоря тягового электродвигателя;
R - суммарное сопротивление цепей тягового электродвигателя;
k - масштабный коэффициент;
СФ-коэффициент магнитного потока.
В процессе разгона тепловоза под действием силы тяги, определяемой токами якорей тяговых электродвигателей, а также сил сопротивления движению, определяемых, например, профилем пути, по которому движется тепловоз, конструктивными особенностями тепловоза и поезда в целом, наличием кривых на участке пути и других факторов, достигается такой режим, когда сила тяги тепловоза уравновешивается силами сопротивления. Одновременно с этим в электрической цепи тепловоза также достигается режим равновесия, определяемый точкой «А» на пересечении характеристики «б», соответствующей постоянной частоте вращения тягового электродвигателя и гиперболе «а» постоянной мощности на фиг.2. Он характеризуется тем, что достигается заданное значение положения рейки дозирующего органа топливоподачи дозирующего органа топливоподачи регулятора 2 частоты вращения и нагрузки, и при этом мощность тягового генератора переменного тока полностью соответствует свободной мощности теплового двигателя 1. При этом точка «А» на фиг.2 определяет режим всех тяговых электродвигателей, например 7, 8 на фиг.1. При изменении условий движения, например, при переломе профиля или при движении на уклон, уменьшается сопротивление движению, тепловоз с поездом начинает разгоняться, токи якорей тяговых электродвигателей 7 и 8 уменьшаются, снижается мощность тягового генератора 4 переменного тока и соответственно уменьшается момент сопротивления на валу теплового двигателя 1. Частота вращения вала теплового двигателя 1 под воздействием избытка вращающего момента начинает увеличиваться, регулятор 2 частоты вращения и нагрузки теплового двигателя 1 вступает в действие, уменьшая подачу топлива с помощью дозирующего органа топливоподачи, при этом появляется рассогласование ΔL между заданным положением рейки дозирующего органа топливоподачи и его измеренным положением, в результате блок 17 интегрирования начинает работать на увеличение, что соответствует увеличению задания напряжения тягового генератора переменного тока 4. Мощность тягового генератора переменного тока 4 начинает увеличиваться с одновременным увеличением момента сопротивления на валу теплового двигателя 1. Итогом становится новое установившееся положение равновесия, на фиг.2 это точка В на пересечении характеристики «д» постоянной частоты вращения тягового электродвигателя и гиперболы «а» постоянной мощности. Таким образом, при медленном изменении профиля пути, по которому движется тепловоз с составом, рабочая точка перемещается по гиперболе «а» постоянной мощности, обеспечивая согласование свободной мощности теплового двигателя 1 с мощностью тягового генератора переменного тока 4. Частоты вращения всех тяговых электродвигателей 7 и 8 (Фиг.1.), в этом режиме работы практически одинаковы, отличие определяется различием скоростных характеристик тяговых электродвигателей и различием диаметров колесных пар тепловоза, связанных с этими электродвигателями. При этом способ позволяет осуществить работу тепловоза с полной мощностью теплового двигателя 1 и с частичными мощностями, соответствующими линиями наибольшей экономичности теплового двигателя 1.
Перед возникновением режима боксования колесной пары, связанной с электродвигателем 8, электрическая передача находилась в равновесном состоянии, а тяговые электродвигатели 7,8 работали, например, в точке «А» на пересечении характеристики «б» постоянной частоты вращения тягового электродвигателя и гиперболы «а» постоянной мощности (Фиг.2).
В силу изменения условий по сцеплению «колесо-рельс» колесная пара, связанная с электродвигателем 8, приобрела избыточную скорость скольжения, частота вращения электродвигателя 8 соответственно увеличивается, на выходе сумматора 13 появляется сигнал, пропорциональный разности частоты вращения тягового электродвигателя 8 и минимальной частоты вращения всех тяговых электродвигателей всех секций тепловоза, этот сигнал сравнивается в пороговом элементе 24 с величиной заранее установленного порога, результат сравнения со знаком минус подается на вход сумматора 20, на другой вход которого подается сигнал уставки напряжения тягового генератора переменного тока 4 с выхода блока 17 интегрирования. Пороговые элементы 23 и 24 обеспечивают нечувствительность устройства к технологической разности механических характеристик тяговых электродвигателей 7 и 8. В результате на вход управления управляемого выпрямителя 6 подается уставка напряжения, уменьшенная на величину, пропорциональную разности частоты вращения тягового электродвигателя 8, связанного с боксующей колесной парой и минимальной частоты вращения всех тяговых электродвигателей всех секций тепловоза. В результате на выходе управляемого выпрямителя 6 напряжение уменьшается и рабочая точка для тягового электродвигателя 8 перемещается по характеристике «б» постоянной частоты вращения тягового электродвигателя из точки «А» в точку «С» (Фиг 2.). Режим работы тягового электродвигателя 7 при этом не меняется и он остается работать на полной мощности в точке «А» (Фиг.2). Использование в способе регулирования тяговой электропередачи раздельного регулирования напряжения, подводимого к тяговым электродвигателям последовательного возбуждения, и формирования искусственных жестких скоростных характеристик тяговых электродвигателей позволяет сформировать для каждого тягового электродвигателя в режиме боксования характеристику, идентичную по своей жесткости тяговым электродвигателям независимого возбуждения, что позволяет получить высокие коэффициенты использования сцепного веса локомотива, исключить разносное боксование, ограничить избыточные скорости скольжения минимальными величинами, повысить тяговые свойства тепловоза при быстрых изменениях нагрузки (например, при боксовании) и экономичность теплового двигателя 1.
Способ регулирования электрической передачи тепловоза испытан и реализован с применением микропроцессорной системы управления МСУ-ТП на тепловозе 2ТЭ116У и показал положительные результаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования электрической передачи тепловоза | 2020 |
|
RU2729865C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2010 |
|
RU2423251C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2011 |
|
RU2476332C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2013 |
|
RU2534597C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2006 |
|
RU2300470C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 1998 |
|
RU2130389C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2000 |
|
RU2174919C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2011 |
|
RU2454335C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2008 |
|
RU2366583C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2009 |
|
RU2438886C2 |
Изобретение относится к железнодорожному транспорту, а именно к способу регулирования электропередачи тепловоза с автономным тепловым двигателем, генератором переменного тока и электродвигателями постоянного тока. Способ заключается в том, что задают частоту вращения тепловых двигателей, приводящих во вращение тяговые генераторы переменного тока, связанные с тяговьми электродвигателями. Измеряют положение рейки дозирующего органа топливоподачи регулятора частоты вращения и нагрузки тепловых двигателей. Задают положение рейки дозирующего органа пропорционально заданной частоте вращения тепловых двигателей. Сравнивают заданное положение рейки дозирующего органа с измеренным положением рейки дозирующего органа, величину их рассогласования интегрируют по времени и принимают за величину уставки напряжения тягового генератора переменного тока соответствующей секции. Измеряют частоту вращения каждого тягового электродвигателя всех секций тепловоза. Выделяют минимальную из измеренных частот вращения тяговых электродвигателей и суммируют ее со знаком минус с измеренными частотами вращения каждого тягового электродвигателя. Результаты суммирования сравнивают с величиной заранее установленного порога, величину их рассогласования суммируют со знаком минус с уставкой напряжения тягового генератора переменного тока соответствующей секции, результаты суммирования принимают за уставки выходного напряжения управляемых выпрямителей, по которым осуществляют фазовое регулирование выходного напряжения управляемых выпрямителей, которое подают на вход тяговых электродвигателей. Достигается повышение тяговых свойств тепловоза при быстрых изменениях нагрузки и обеспечение наибольшей экономичности теплового двигателя путем раздельного регулирования напряжения, подводимого к тяговьм электродвигателям последовательного возбуждения, и формирования искусственных жестких скоростных характеристик тяговых электродвигателей. 2 ил.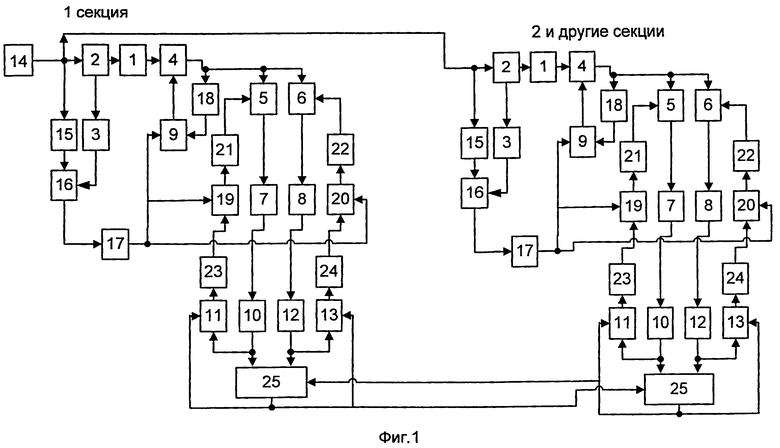
Способ регулирования электрической передачи тепловоза, состоящего из одной и более секций, заключающийся в том, что задают частоту вращения тепловых двигателей, приводящих во вращение тяговые генераторы переменного тока, связанные с тяговыми электродвигателями, измеряют положение рейки дозирующего органа топливоподачи регулятора частоты вращения и нагрузки тепловых двигателей, соответствующее текущему значению частоты вращения тепловых двигателей, задают положение рейки дозирующего органа топливоподачи регулятора частоты вращения и нагрузки тепловых двигателей пропорционально заданной частоте вращения тепловых двигателей, сравнивают заданное положение рейки дозирующего органа топливоподачи регулятора частоты вращения и нагрузки тепловых двигателей с измеренным положением рейки дозирующего органа, величину их рассогласования интегрируют по времени и принимают за величину уставки напряжения тягового генератора переменного тока соответствующей секции, отличающийся тем, что измеряют частоту вращения каждого тягового электродвигателя всех секций тепловоза, выделяют минимальную из измеренных частот вращения тяговых электродвигателей, величину минимальной частоты вращения тяговых электродвигателей суммируют со знаком минус с измеренными частотами вращения каждого тягового электродвигателя, результаты суммирования сравнивают с величиной заранее установленного порога, величину их рассогласования суммируют со знаком минус с уставкой напряжения тягового генератора переменного тока соответствующей секции, результаты суммирования принимают за уставки выходного напряжения управляемых выпрямителей, по которым осуществляют фазовое регулирование выходного напряжения управляемых выпрямителей, которое подают на вход тяговых электродвигателей.
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА В РЕЖИМЕ ТОРМОЖЕНИЯ | 2007 |
|
RU2350487C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2000 |
|
RU2174919C1 |
| Устройство для регулирования тягового электропривода автономного транспортного средства | 1986 |
|
SU1310256A2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2008 |
|
RU2366583C1 |

