Область техники
Настоящее изобретение относится в общем случае к механизмам, а более конкретно, к способу и устройству для контроля ветряных двигателей.
Предшествующий уровень техники
В общем случае генератор с приводом от ветряного двигателя содержит турбину, которая имеет вращающуюся ступицу в сборе, которая содержит множество лопастей. Ступица в сборе связана с ротором, и лопасти преобразуют механическую энергию ветра в механический крутящий момент, который приводит в движение один или большее количество генераторов через ротор. Генераторы в общем случае, но не всегда, связаны с ротором через редуктор. Редуктор увеличивает по существу низкую скорость вращения ротора для предоставления возможности генератору эффективно преобразовывать механическую энергию вращения в электрическую энергию, которую доставляют к сети высокого напряжения общего пользования. Также существуют генераторы с приводом от ветряного двигателя, соединенные непосредственно без редуктора. В общем случае ротор, генератор, редуктор и другие компоненты устанавливают в пределах корпуса или обтекателя, который размещают наверху основания, такого как рамная, решетчатая или трубчатая опора.
Некоторые известные ветряные двигатели содержат системы контроля вибрации, которые записывают, передают и анализируют данные, которые содержат данные скорости и вибрации компонентов, но не ограничены ими. В общем случае данные скорости и вибрации компонентов формируют взаимозависимость, которая облегчает анализ компонента в определенное время. Поэтому регистрация данных скорости и вибрации компонентов, когда уменьшают разность между ними во времени, облегчает анализ компонентов. Однако известные системы контроля вибрации не предназначены для записи, передачи и/или обработки данных скорости и вибрации компонентов одновременно, но может потребоваться использование данных скорости и вибрации компонентов, зарегистрированных в различное время.
Краткое описание существа изобретения
Согласно одному из аспектов изобретения предложена система контроля механизма. Механизм содержит по меньшей мере один подвижный элемент, содержащий по меньшей мере один датчик для генерации по меньшей мере одного сигнала измеренной скорости подвижного элемента. Механизм также содержит по меньшей мере один процессор, связанный по системе электронной передачи данных с датчиком. Датчик конфигурирован для генерации по меньшей мере одного значения по меньшей мере для одного сигнала измеренной скорости. По меньшей мере один процессор конфигурирован для генерации множества сигналов измеренной скорости с временными метками по меньшей мере одного подвижного элемента. Процессор дополнительно конфигурирован для определения приоритетов для множества сигналов измеренной скорости с временными метками как функции по меньшей мере одного предварительно определенного временного значения.
Согласно дополнительному аспекту изобретения предложен способ контроля механизма. Механизм содержит по меньшей мере один подвижный элемент и систему контроля, содержащую по меньшей мере один датчик и по меньшей мере один процессор, связанный по системе электронной передачи данных по меньшей мере с одним датчиком. Способ содержит прием в процессоре множества сигналов измеренной скорости по меньшей мере от одного датчика, назначение с помощью процессора значения временной метки каждому из множества сигналов измеренной скорости для генерации множества сигналов измеренной скорости с временными метками, определение в процессоре приоритетов для множества сигналов измеренной скорости с временными метками и передачу по меньшей мере одного сигнала измеренной скорости с временными метками с назначенным приоритетом.
Согласно дополнительному аспекту изобретения предложен генератор с приводом от ветряного двигателя. Генератор с приводом от ветряного двигателя содержит по меньшей мере один вращающийся элемент и систему контроля. Система контроля содержит по меньшей мере один датчик для генерирования по меньшей мере одного результата измерения скорости подвижного элемента. По меньшей мере один процессор связан по системе электронной передачи данных с датчиком. Датчик обеспечивает генерирование значения временной метки по меньшей мере для одного сигнала измеренной скорости, так что по меньшей мере один процессор конфигурируют для генерирования множества сигналов измеренной скорости с временными метками по меньшей мере одного подвижного элемента. Процессор дополнительно конфигурируют для определения приоритетов множества сигналов измеренной скорости с временными метками.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых
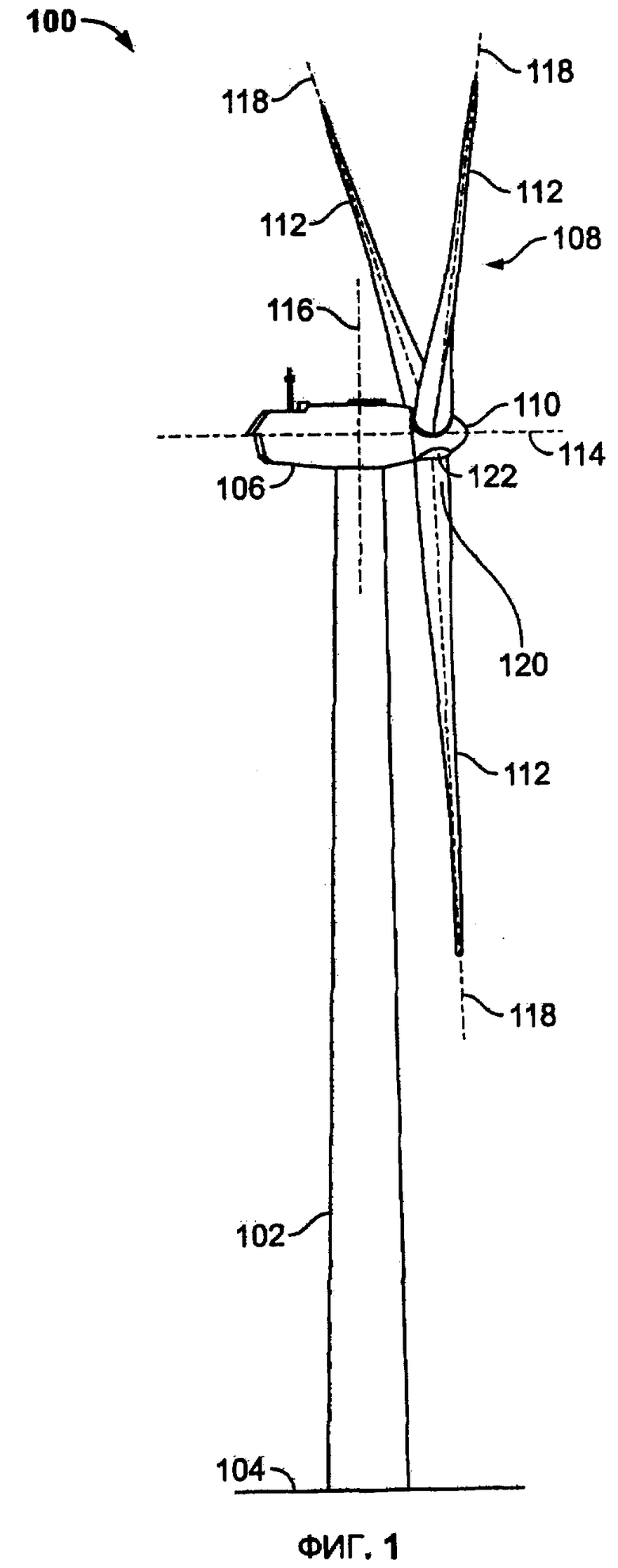
фиг.1 изображает схему генератора с приводом от ветряного двигателя согласно изобретению;
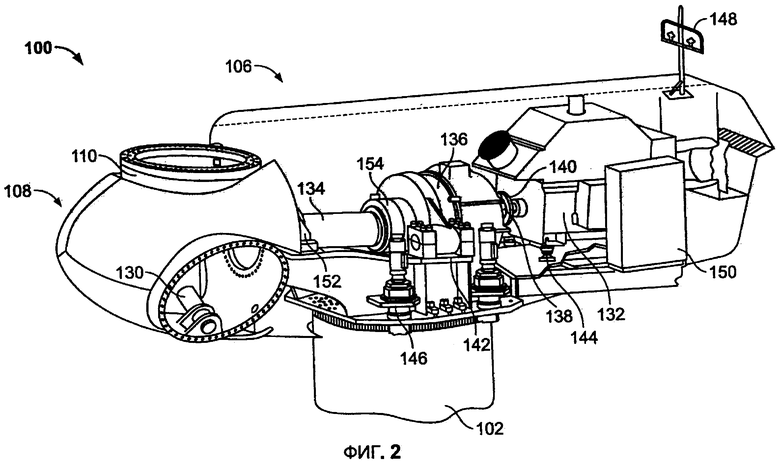
фиг.2 изображает общий вид обтекателя (частичный разрез), который может использоваться с генератором с приводом от ветряного двигателя, согласно изобретению;
фиг.3 изображает схему системы контроля вибрации, которая может использоваться с ветряным двигателем, согласно изобретению;
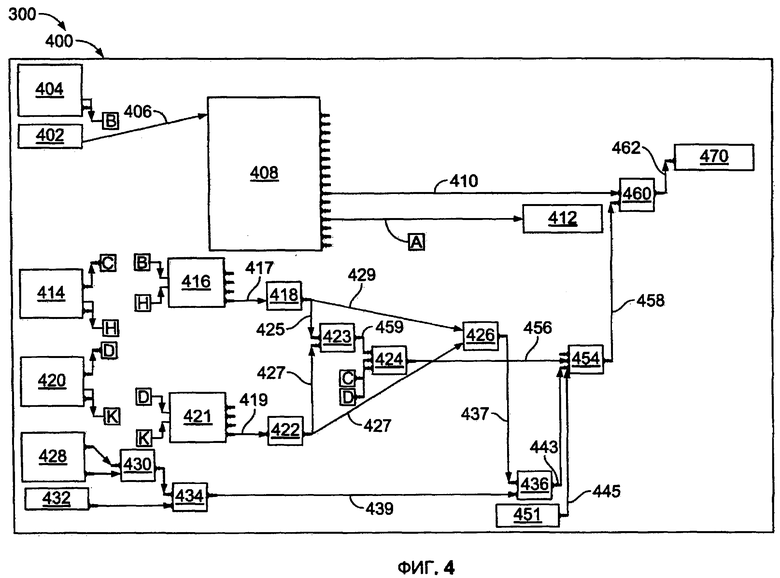
фиг.4 изображает структурную схему логического модуля, который может использоваться с системой контроля вибрации, согласно изобретению;
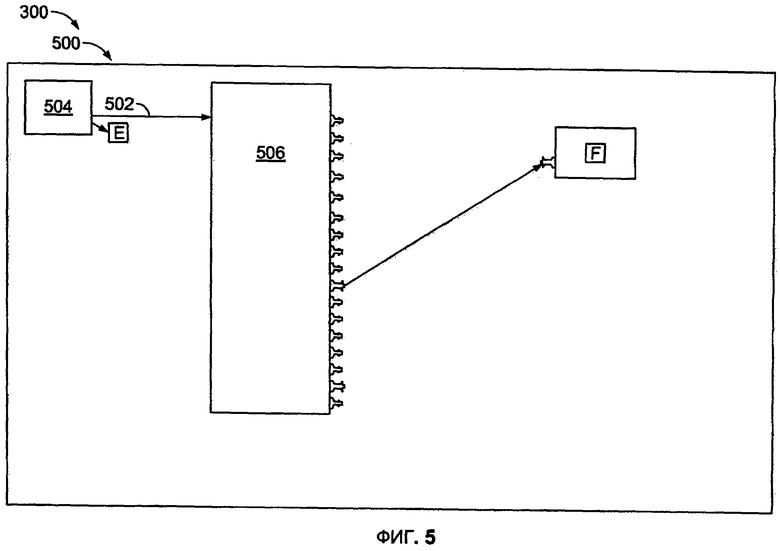
фиг.5 изображает структурную схему альтернативного варианта осуществления логического модуля, который может использоваться с системой контроля вибрации, согласно изобретению;
фиг.6 изображает структурную схему альтернативного варианта осуществления логического модуля, который может использоваться с системой контроля вибрации, согласно изобретению.
Подробное описание предпочтительных вариантов воплощения изобретения
На фиг.1 представлен генератор 100 с приводом от ветряного двигателя. В приведенном варианте осуществления генератор 100 с приводом от ветряного двигателя является ветряным двигателем с горизонтальной осью. В указанном варианте осуществления генератор 100 с приводом от ветряного двигателя является генератором 100 с приводом от ветряного двигателя модификации 1,5 мегаватт (МВт), предлагаемый к продаже фирмой Дженерал Электрик, Скенектади, Нью-Йорк (General Electric, Schenectady, New York). Альтернативно, ветряной двигатель 100 может быть ветряным двигателем с вертикальной осью. Ветряной двигатель 100 имеет опору 102, которая проходит от опорной поверхности 104, установленный на опоре 102 обтекатель 106 и связанный с обтекателем 106 ротор 108. Ротор 108 имеет вращающуюся ступицу 110 и множество лопастей 112, связанных со ступицей 110.
В описываемом варианте осуществления ротор 108 имеет три лопасти 112 ротора. В другом варианте осуществления ротор 108 может иметь больше или меньше трех лопастей 112 ротора. Опору 102 изготавливают из стальных труб, и она имеет полость (не показана), которая проходит между опорной поверхностью 104 и обтекателем 106.
В альтернативном варианте осуществления опора 102 является решетчатой опорой. Высоту опоры 102 выбирают, основываясь на факторах и условиях, известных из предшествующего уровня техники.
Лопасти 112 размещены вокруг ступицы 110 ротора для обеспечения вращения ротора 108 для преобразования кинетической энергии ветра в полезную механическую энергию и затем в электрическую энергию. Лопасти 112 соединены со ступицей 110 с помощью соединения основания 120 лопасти со ступицей 110 в множестве областей 122 передачи нагрузки. Области 122 передачи нагрузки имеют область передачи нагрузки ступицы и область передачи нагрузки лопасти (обе не показаны). Нагрузки, возникающие в лопастях 112, передаются к ступице 110 через области 122 передачи нагрузки.
Лопасти 112 имеют длину от 50 метров (м) (164 фута) до 100 м (328 футов). Альтернативно, лопасти 112 могут иметь длину больше 100 м (328 футов) или меньше 50 м (164 фута). Когда на лопасти 112 оказывает давление ветер, ротор 108 вращается вокруг оси 114 вращения. При вращении лопасти 112 подвергаются центробежным силам, а также различным изгибающим моментам и другим рабочим напряжениям. Также лопасти 112 могут отклоняться и/или вращаться из нейтрального, или неотклоненного, положения в отклоненное положение, при этом в лопастях 112 могут появляться соответствующие напряжения или нагрузки. Кроме того, угол тангажа (наклона в продольном направлении) лопастей 112, т.е. угол, который определяет положение лопастей 112 относительно направления ветра, можно изменять с помощью механизма настройки тангажа (не показан) для увеличения или уменьшения скорости лопастей 112, регулируя площадь поверхности лопастей 112, которая подвергается векторам силы ветра. Показаны оси 118 тангажа лопастей 112. В описываемом варианте осуществления тангажом лопастей 112 управляют отдельно. Альтернативно, можно управлять тангажом группы лопастей 112.
В некоторых конфигурациях один или большее количество микроконтроллеров в системе управления (не показана) используют для контроля и управления всей системой, включающей в себя регулирование тангажа и скорости вращения ротора, приведение в движение и торможение в горизонтальной плоскости и контроль повреждений. Альтернативно, в дополнительных вариантах осуществления ветряного двигателя 100 используют распределенное или централизованное управление.
На фиг.2 представлен общий вид с частичным разрезом, обтекателя 106, который может использоваться с генератором 100 с приводом от ветряного двигателя (показанным на фиг.1). Различные компоненты ветряного двигателя 100 размещены в обтекателе 106, расположенном наверху опоры 102. Приводные механизмы 130 (только один показан на фиг.2) регулируют тангаж лопастей 112 по осям 118 тангажа (фиг.1).
В общем случае ротор 108 связан с электрическим генератором 132, размещенным в пределах обтекателя 106, через вал 134 ротора (иногда называют тихоходным валом 134), редуктор 136, высокоскоростной вал 138 и муфту 140. При вращении вала 134 вращается редуктор 136, который затем вращает вал 138. Вал 138 вращает генератор 132 через муфту 140, и вращение вала 138 обеспечивает выработку электроэнергии в генераторе 132. Редуктор 136 и генератор 132 поддерживают с помощью элементов 142 и 144 основания, соответственно.
Механизм 146 настройки рыскания также размещен в обтекателе 106 и может использоваться для вращения обтекателя 106 и ротора 108 на оси 116 (фиг.1) для управления положением ветряного двигателя 100 относительно направления ветра. Механизм 146 управления связан с обтекателем 106, и метеорологическая мачта 148 содержит флюгер и анемометр (не показаны). Мачта 148 размещена в обтекателе 106 и обеспечивает для системы управления двигателем информацию, которая может включать в себя направление ветра и/или скорость ветра. Часть системы управления двигателем расположена в пределах панели 150 управления.
Коренной подшипник 152 размещен внутри обтекателя и поддерживается с помощью обтекателя 106. Подшипник 152 обеспечивает радиальную поддержку и выравнивание вала 134. Вал 134 связан с редуктором 136 через муфту 154.
На фиг.3 схематически представлена система 300 контроля вибрации, которая может использоваться с ветряным двигателем 100 (фиг.1). В описываемом варианте осуществления редуктор 136 содержит три узла ротора и использует двунаправленную геометрию для привода в движение высокоскоростного вала 138, как обсуждается дополнительно ниже. Альтернативно, редуктор 136 может иметь любую конфигурацию, которая обеспечивает работу ветряного двигателя 100. Кроме того, ветряной двигатель 100 может иметь безредукторную конфигурацию, т.е. вал 134 основного ротора связан непосредственно с генератором 132 через муфту 140, и систему 300 конфигурируют для контроля других компонентов ветряного двигателя 100. В общем случае при вращении вала 134 вращается редуктор 136, который затем вращает вал 138. Более конкретно, редуктор 136 содержит входной узел 302 редуктора, промежуточный узел 304 редуктора и выходной узел 306 редуктора. Каждый узел 302, 304 и 306 редуктора содержит по меньшей мере две шестерни. Более конкретно, входной узел 302 редуктора содержит входную шестерню 310 и ускоряющую входную шестерню 312, промежуточный узел 304 редуктора содержит промежуточную шестерню 314 и ускоряющую промежуточную шестерню 316, и выходной узел 306 редуктора содержит выходную шестерню 318 и ускоряющую выходную шестерню 320. Внешний диаметр и количество зубьев каждой входной шестерни 310, 314 и 318 больше внешнего диаметра и количества зубьев каждой соответствующей ускоряющей шестерни 312, 316 и 320. Каждую входную шестерню 310, 314 и 318 конфигурируют для вращения и зацепления части ускоряющей шестерни 312, 316 и 320. Более конкретно, когда каждая входная шестерня 310, 314 и 318 вращается, вращается и соответствующая ускоряющая шестерня 312, 316 и 320, соответственно.
Редуктор 136 также содержит различные валы. Более конкретно, редуктор 136 содержит вал 134. Вращение вала 134 приводит во вращение входную шестерню 310, которая затем вращает входную ускоряющую шестерню 312. Первый выходной вал 332 вращательно связывает входную ускоряющую шестерню 312 с промежуточной шестерней 314, так что вращение входной промежуточной шестерни 312 вращает первый выходной вал 332, последовательно вращая промежуточную шестерню 314. Вал 332 получает по меньшей мере некоторую радиальную поддержку по меньшей мере от одного подшипника 333. Промежуточная шестерня 314 затем вращает промежуточную ускоряющую шестерню 316. Точно так же второй выходной вал 334 вращательно связывает промежуточную ускоряющую шестерню 316 с выходной шестерней 318, так что вращение промежуточной ускоряющей шестерни 316 вращает второй выходной вал 334, последовательно вращая выходную шестерню 318. Вал 334 получает по меньшей мере некоторую радиальную поддержку по меньшей мере от одного подшипника 335. Выходная шестерня 318 затем вращает выходную ускоряющую шестерню 320. Третий выходной вал 336 вращательно связывает выходную ускоряющую шестерню 320 с валом 138, так что вращение выходной ускоряющей шестерни 320 вращает третий выходной вал 336, последовательно вращая вал 138, обеспечивая выработку электроэнергии генератором 132. Вал 336 принимает по меньшей мере некоторую радиальную поддержку по меньшей мере от одного подшипника 337. Третий выходной вал 336 связан с высокоскоростным валом 138 через муфту 140, как описано выше.
Шестерни 310, 314 и 318 зацепляют соответствующие шестерни 312, 316 и 320 посредством множества зубьев, сформированных на наиболее радиально удаленных частях шестерней 310, 312, 314, 316, 318 и 320. Дополнительно шестерни 310, 314 и 318 имеют больший размер окружности, чем шестерни 312, 316 и 320. Поэтому шестерни 310, 314 и 318 имеют первую скорость вращения, которая приводит в движение связанные шестерни 312, 316 и 320, соответственно, со второй скоростью вращения. В описываемом варианте осуществления вторая скорость вращения больше первой скорости вращения. Следовательно, когда скорость вращения шестерни 310 приблизительно равна 20 об/мин, скорость вращения шестерни 320 приблизительно равна 1400 об/мин. Таким образом достигается коэффициент повышения скорости всего редуктора 70:1.
Дополнительно обтекатель 106 содержит различные подшипники, соединенные с каждым валом, которые обеспечивают радиальную поддержку и выравнивание соответствующего вала. Каждый вал имеет по меньшей мере один набор из двух подшипников (не показаны). Дополнительно обтекатель 106 содержит внутренний подшипник 350 генератора и наружный подшипник 352 генератора. В описываемом варианте осуществления подшипники 350 и 352 связаны с валом 138.
В общем случае система 300 содержит множество акселерометров. Обтекатель 106 содержит по меньшей мере шесть акселерометров, включающих в себя акселерометр 360 коренного подшипника, акселерометр 362 первого выходного вала, акселерометр 364 второго выходного вала, акселерометр 366 третьего выходного вала, акселерометр 368 внутреннего подшипника генератора и акселерометр 370 наружного подшипника генератора. Система 300 также содержит по меньшей мере два датчика скорости Keyphasor, тихоходный датчик Keyphasor 372 и высокоскоростной датчик Keyphasor 374. Акселерометр 360 размещен рядом с коренным подшипником 152. Акселерометры 362, 364 и 366 размещены рядом с подшипниками 333, 335 и 337, соответственно. Акселерометры 368 и 370 размещены рядом с подшипниками 350 и 352, соответственно. Акселерометры 360, 362, 364, 366, 368 и 370 измеряют радиальные ускорения. «Keyphasor» - зарегистрированная торговая марка компании Бентли Невада, Минден, штат Невада (Bently Nevada, Minden, Nevada).
Датчики Keyphasor 372 и 374 генерируют электрические импульсы, которые относятся к точкам на вращающихся валах 134 и 138, соответственно. Каждый из датчиков Keyphasor 372 и 374 генерирует через преобразователь (не показан) сигнал, отмечая событие, происходящее один раз за оборот. Датчики Keyphasor 372 и 374 размещены на или около валов 134 и 138, соответственно. Из шести акселерометров 360, 362, 364, 366, 368 и 370 два акселерометра 360 и 362 связаны с датчиком Keyphasor 372, и четыре акселерометра 364, 366, 368 и 370 связаны с датчиком Keyphasor 374.
Дополнительно акселерометры 360, 362, 364, 366, 368 и 370 и датчики Keyphasor 372 и 374 содержат датчики для сбора и передачи данных от каждого акселерометра 360, 362, 364, 366, 368 и 370 к модулю 380 обеспечения принятия решений (DSM) для ветроэнергетического генератора. В примерном варианте осуществления DSM 380 доступны для приобретения в компании Бентли Невада Корпорации Дженерал Электрик, Миндена, штат Невада (General Electric Corporation Bently-Nevada, Minden, Nevada). Альтернативно, DSM 380 является любым соответствующим устройством, которое обеспечивает работу системы 300. Дополнительно DSM 380 с помощью электроники связан с процессором 382.
Процессор 382 обрабатывает данные, принятые через DSM 380 от акселерометров 360, 362, 364, 366, 368 и 370 и датчиков Keyphasor 372 и 374. Процессор 382 содержит по меньшей мере один процессор и запоминающее устройство (не показаны). Термин «компьютер» не ограничен только теми интегральными схемами, на которые в предшествующем уровне техники ссылаются как на компьютер, но широко относится к процессору, микроконтроллеру, микрокомпьютеру, программируемому логическому контроллеру (PLC), специальной интегральной схеме и другим программируемым схемам, и эти термины в данной работе используются взаимозаменяемо. Запоминающее устройство может содержать считываемый компьютером носитель, такой как оперативная память (ОП), но не ограничен ею. Альтернативно, могут также использоваться гибкий диск, компакт-диск (CD-ROM), магнитооптический диск (MOD) и/или цифровой универсальный диск (DVD).
На фиг.4 представлена структурная схема логического модуля 400 определения скорости и средней скорости вращения в оборотах в минуту (об/мин) механизма, который может использоваться с системой 300. Как правило, система 300 содержит один логический модуль 400 для каждого из акселерометров 364, 366, 368 и 370. Поэтому логический модуль 400 принимает входные данные от акселерометра 402, который содержит по меньшей мере один из акселерометров 364, 366, 368 и 370. Данные 406 аналогового сигнала собирают с помощью акселерометра 402 и назначают временные метки с помощью функционального блока 404 временной метки сигнала измеренной скорости. Функциональный блок 404 выводит сигнал B временной метки измеренной скорости, который передают в систему 300. Данные 406 аналогового сигнала передают в реестр 408 данных аналогового сигнала, из которого сигнал 410 начальной измеренной скорости в оборотах в минуту передают в систему 300. В реестре 408 данных аналогового сигнала сигнал A средней вычисленной скорости в оборотах в минуту определяют с помощью суммирования предварительно определенного количества сигналов 410 и деления данной суммы на предварительно определенное количество сигналов 410. Сигнал A передают из реестра 408 данных аналогового сигнала в регистр 412 для дальнейшего использования в системе 300.
Логический модуль 400 также содержит функциональный блок 414 временной метки сигнала измеренной скорости генератора, который принимает сигнал C измеренной скорости генератора из источника (не показан), внешнего относительно DSM 380, и назначает временную метку H сигналу измеренной скорости генератора. Например, систему диспетчерского управления и сбора данных (SCADA) (не показана) связывают по системе электронной передачи данных с модулем DSM 380. Сигнал C и сигнал H передают для дальнейшего использования в системе 300. Логический модуль 400 также содержит функциональный блок 416 определения разницы во времени, который принимает сигнал B и сигнал H. Сигнал B и сигнал H сравнивают и генерируют разностный сигнал 417 временных меток. Сигнал 417 передают в функциональный блок 418 определения абсолютной величины, в котором определяют абсолютную величину сигнала 417 и передают ее для последующего использования в логическом модуле 400.
Логический модуль 400 также содержит функциональный блок 420 временной метки сигнала, измеренной с помощью датчика Keyphasor скорости высокоскоростного вала, который принимает сигнал D измеренной скорости высокоскоростного вала генератора от датчика Keyphasor 374 и назначает временную метку K сигналу измеренной скорости генератора. Сигнал D и сигнал K передают для дальнейшего использования в системе 300. Логический модуль 400 также содержит функциональный блок 421 определения разницы во времени, который принимает сигнал D и сигнал K. Точно так же сигнал D и сигнал K сравнивают и генерируют разностный сигнал 419 временных меток. Сигнал 419 передают в функциональный блок 422 определения абсолютной величины, в котором определяют абсолютную величину сигнала 419 и передают ее для последующего использования в логическом модуле 400.
Функциональный блок 418 передает сигнал 425 в функциональный блок 423 определения меньшего значения. Точно так же функциональный блок 422 передает сигнал 427 в функциональный блок 423. Функциональный блок 423 определяет меньший из сигналов 425 и 427 и передает сигнал 459 выбора в функциональный блок 424 переключения. Функциональный блок 424 выбирает или сигнал C, или сигнал D, основываясь на сигнале 429. Например, если сигнал 425 представляет меньшую разницу во времени, чем сигнал 427, то функциональный блок 424 выбирает сигнал C. Кроме того, сигнал 425 и сигнал 427 передают в функциональный блок 426 выбора минимального значения для дальнейшего использования в логическом модуле 400.
Предварительно определенные временные значения конфигурируют в системе 300. Например, максимальную разницу во времени конфигурируют в функциональном блоке 428 определения максимальной разницы во времени, так что временную метку применяют к максимальной разнице во времени, и сигнал передают в функциональный блок 430 преобразования единиц измерения. Максимальная разница во времени является операндом, который вручную конфигурирует оператор. Максимальное значение разницы во времени, конфигурируемое в функциональном блоке 428, обычно выбирают для обеспечения диагностических возможностей системы 300, которые обсуждаются ниже. Функциональный блок 430 преобразует сигнал в секунды и передает преобразованный сигнал в функциональный блок 434 автоматического переключения для дополнительного использования в логическом модуле 400. Функциональный блок 434 принимает сигнал из функционального блока 430 и принимает числовую константу из регистра 432 числовой константы. Регистр 432 хранит определенное оператором значение времени. Функциональный блок 434 передает определенное оператором значение времени, хранящееся в регистре 432, когда максимальную разницу во времени не конфигурируют в функциональном блоке 428, как обсуждается выше.
Логический модуль 400 также содержит функциональный блок 436 определения меньшего значения, который принимает выходной сигнал 437 из функционального блока 426 и выходной сигнал 439 из функционального блока 434. Функциональный блок 436 определяет меньший из сигналов 437 и 439 и передает выбранный сигнал 443 в функциональный блок 454 переключения. В указанном варианте осуществления регистр 451 числовой константы сохраняет предварительно определенное временное значение, равное нулю. Когда сигнал 437 превышает сигнал 439, сигнал 445 передают в функциональный блок 454 переключения для блокирования сигнала 456, переданного из функционального блока 424. Впоследствии значение нуля продвигают в функциональный блок 454 переключения. Когда сигнал 437 меньше сигнала 439, сигнал 456 передают через функциональный блок 454 переключения. Функциональный блок 454 переключения принимает сигнал 456, который содержит или сигнал C, или сигнал D, или нулевое значение из регистра 451. Функциональный блок 454 переключения затем передает сигнал 458.
Логический модуль 400 также содержит автоматический переключатель 460, который принимает сигналы 410 и 458, и передает сигнал 462 в регистр 470 скорости механизма для дальнейшего использования в системе 300.
При работе логический модуль 400 передает сигнал 410 через автоматический переключатель 460 в регистр 470. Значение в регистре 470 скорости механизма используется в системе 300 для обработки и анализа данных 406 аналогового сигнала. Поэтому предпочтительным значением в регистре 470 является сигнал 410, т.е. сигнал 410 начальной измеренной скорости в об/мин. Когда сигнал 410 недоступен, сигнал 458 замены передают в регистр 470. Сигнал 458 замены содержит по меньшей мере один сигнал из группы, состоящей из сигнала C, сигнала D или нулевого значения. Использование нулевого значения в регистре 470 препятствует анализу и обработке данных 406 аналогового сигнала даже при том, что разрешено продолжение сбора данных для последующих действий, которые содержат оценку и анализ в ручном режиме, но не ограничены ими. Поэтому сигналы C и D предпочтительно имеют значения выше нуля для обеспечения обработки и анализа данных 406 аналогового сигнала.
На фиг.5 представлена структурная схема логического модуля 500 определения скорости первого выходного вала, который может использоваться с системой 300. Логический модуль 500 принимает сигнал акселерометра 362 первого выходного вала. Данные аналогового сигнала 502 собирают с помощью акселерометра 362 и назначают временную метку с помощью функционального блока 504 временной метки сигнала измеренной скорости первого вывода. Функциональный блок 504 выводит сигнал E временной метки измеренной скорости, который передают в систему 300. Данные аналогового сигнала 502 передают в реестр 506 данных аналогового сигнала, из которого сигнал F начальной измеренной скорости в оборотах в минуту передают в систему 300. Система 300 также содержит логический модуль коренного подшипника (не показан), который по существу подобен логическому модулю 500.
При работе логический модуль 500 передает сигнал 502 в реестр 506 данных аналогового сигнала. Модуль 500 также передает сигнал E в другое место в системе 300. Значение в реестре 506 используют в системе 300 для обработки и анализа сигнала 502. Поэтому предпочтительным значением в реестре 506 является сигнал F, т.е. сигнал F начальной измеренной скорости в об/мин.
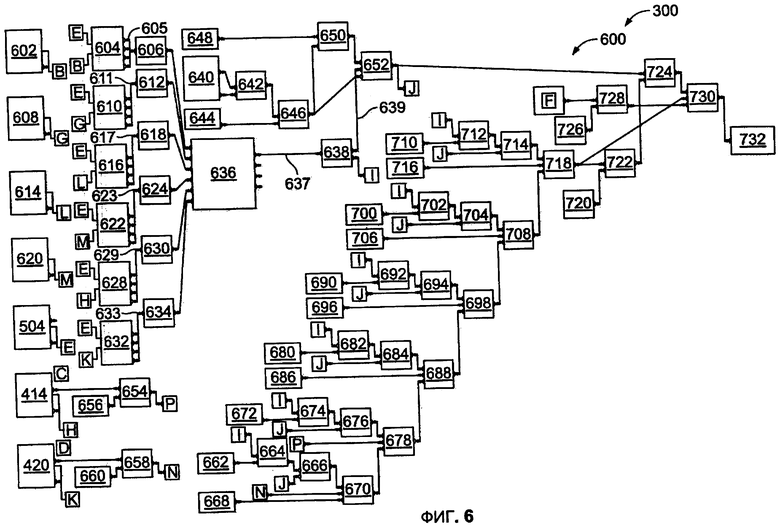
На фиг.6 представлена структурная схема логического модуля 600 определения приоритета скорости первого выходного вала, который может использоваться с системой 300. Система 300 также содержит логический модуль коренного подшипника (не показан), который по существу подобен логическому модулю 600.
Логический модуль 600 содержит функциональный блок 602 временной метки сигнала измеренной скорости третьего выходного вала. Сигнал измеренной скорости третьего выходного вала (не показан) передают в функциональный блок 602 из регистра 470 (фиг.4), связанного с логическим модулем 400, который дополнительно связан с акселерометром 336 (фиг.3). Функциональный блок 602 назначает временную метку B сигналу измеренной скорости третьего выходного вала от акселерометра 366. Сигнал B передают в функциональный блок 604 определения разницы во времени, который принимает сигнал B и сигнал E (фиг.5). Сигнал B и сигнал E сравнивают и генерируют разностный сигнал 605 временных меток. Сигнал 605 передают в функциональный блок 606 определения абсолютной величины, в котором определяют абсолютную величину сигнала 605 и передают ее для последующего использования в логическом модуле 600.
Логический модуль 600 содержит функциональный блок 608 временной метки сигнала измеренной скорости третьего выходного вала. Сигнал измеренной скорости второго выходного вала (не показан) передают в функциональный блок 608 из регистра 470, связанного с логическим модулем 400, который дополнительно связан с акселерометром 364 (фиг.3). Функциональный блок 608 назначает временную метку G сигналу измеренной скорости второго выходного вала от акселерометра 364. Сигнал G передают в функциональный блок 610 определения разницы во времени, который принимает сигнал G и сигнал E. Сигнал G и сигнал E сравнивают и генерируют разностный сигнал 611 временных меток. Сигнал 611 передают в функциональный блок 612 определения абсолютной величины, в котором абсолютную величину сигнала 611 определяют и передают для последующего использования в логическом модуле 600.
Логический модуль 600 содержит функциональный блок 614 временной метки сигнала измеренной скорости внутреннего подшипника генератора. Сигнал измеренной скорости внутреннего подшипника генератора (не показан) передают в функциональный блок 614 из регистра 470, связанного с логическим модулем 400, который дополнительно связан с акселерометром 368 (фиг.3). Функциональный блок 614 назначает временную метку L сигналу измеренной скорости внутреннего подшипника генератора от акселерометра 368. Сигнал L передают в функциональный блок 616 определения разницы во времени, который принимает сигнал L и сигнал E. Сигнал L и сигнал E сравнивают и генерируют разностный сигнал 617 временных меток. Сигнал 617 передают в функциональный блок 618 определения абсолютной величины, в котором определяют абсолютную величину сигнала 617 и передают для последующего использования в логическом модуле 600.
Логический модуль 600 содержит функциональный блок 620 временной метки сигнала измеренной скорости наружного подшипника генератора. Сигнал измеренной скорости наружного подшипника генератора (не показан) передают в функциональный блок 620 из регистра 470, связанного с логическим модулем 400, который дополнительно связан с акселерометром 370 (фиг.3). Функциональный блок 620 назначает временную метку М сигналу измеренной скорости наружного подшипника генератора от акселерометра 370. Сигнал М передают в функциональный блок 622 определения разницы во времени, который принимает сигнал М и сигнал E. Сигнал М и сигнал E сравнивают и генерируют разностный сигнал 623 временных меток. Сигнал 623 передают в функциональный блок 624 определения абсолютной величины, в котором определяют абсолютную величину сигнала 623 и передают для последующего использования в логическом модуле 600.
Логический модуль 600 также содержит функциональный блок 504 (фиг.5), который передает сигнал E (фиг.5). Сигнал E передают в функциональный блок 628 определения разницы во времени, который принимает сигнал E и сигнал H (фиг.4). Сигнал E и сигнал H сравнивают и генерируют разностный сигнал 629 временных меток. Сигнал 629 передают в функциональный блок 630 определения абсолютной величины, в котором абсолютную величину сигнала 629 определяют и передают для последующего использования в логическом модуле 600.
Аналогично сигнал E передают в функциональный блок 632 определения разницы во времени, который принимает сигнал E и сигнал K (фиг.4). Сигнал E и сигнал K сравнивают и генерируют разностный сигнал 633 временных меток. Сигнал 633 передают в функциональный блок 634 определения абсолютной величины, в котором абсолютную величину сигнала 633 определяют и передают для последующего использования в логическом модуле 600.
Каждый из функциональных блоков 606, 612, 618, 624, 630 и 634 передает сигнал из каждого соответствующего функционального блока в буфер 636 выборки. Буфер 636 содержит множество регистров (не показаны), которые содержат данные временных меток, переданных из функциональных блоков 606, 612, 618, 624, 630 и 634, и генерируют числовые значения 1, 2, 3, 4, 5 и 6, соответственно. Буфер 636 передает множество сигналов 637 временных меток из множества регистров в функциональный блок 638 выбора минимального значения. Функциональный блок 638 выбирает наименьшее значение временных меток, хранящихся в множестве регистров, и передает сигнал I номера регистра временных меток буфера выборки с численным значением 1, 2, 3, 4, 5 или 6, и сигнал 639 значения временной метки буфера выборки для дальнейшего использования в логическом модуле 600.
Логический модуль 600 имеет по меньшей мере одно предварительно определенное временное значение. Например, максимальную разницу во времени конфигурируют в функциональном блоке 640 определения максимальной разницы во времени, так что временную метку применяют к максимальной разнице во времени, и сигнал передают в функциональный блок 642 преобразования единиц измерения. Максимальная разница во времени является операндом, который вручную конфигурирует оператор. Максимальное значение разницы во времени, конфигурируемое в функциональном блоке 640, обычно выбирают для обеспечения диагностических возможностей системы 300, которые обсуждаются дополнительно ниже. Функциональный блок 642 преобразует сигнал в секунды и передает преобразованный сигнал в функциональный блок 646 автоматического переключения для дополнительного использования в логическом модуле 600. Функциональный блок 646 принимает сигнал из функционального блока 642 и принимает числовую константу из регистра 644 числовой константы. Регистр 644 хранит определенное оператором временное значение. Функциональный блок 646 передает определенное оператором временное значение, хранящееся в регистре 644, когда максимальную разницу во времени не конфигурируют в функциональном блоке 640, как указано выше.
Логический модуль 600 также содержит функциональный блок 650 умножения, который принимает сигнал из функционального блока 646 и число из регистра 648 числовой константы. Логический модуль 600 также содержит промежуточный функциональный блок 652, который принимает сигнал 639 и выходные данные функциональных блоков 646 и 650. В примерном варианте осуществления регистр 648 содержит значение минус один, так что функциональный блок 650 генерирует и передает отрицательное значение выходных данных функционального блока 646 автоматического переключения в функциональный блок 652. Поэтому функциональный блок 652 конфигурируют для передачи только сигналов значений временных меток буфера выборки в диапазоне от плюса до минуса значения в регистре 644. Такая передача указывает, что буфер 636 выборки содержит по меньшей мере одну правильную выборку. Кроме того, когда буфер 636 выборки содержит по меньшей мере одну правильную выборку, которую передают с помощью функционального блока 652, дискретный сигнал «да» J передают из функционального блока 652 для дальнейшего использования в системе 300. Более того, когда буфер 636 выборок не содержит по меньшей мере одну правильную выборку, которую передает функциональный блок 652, дискретный сигнал «нет» J передают из функционального блока 652 для дальнейшего использования в системе 300.
Логический модуль 600 также содержит функциональный блок 654 автоматического переключения, который принимает сигнал C из функционального блока 414 (фиг.4) и значение из регистра 656 числовой константы. Регистр 656 содержит значение, предварительно определенное оператором. Функциональный блок 654 выбирает и передает сигнал P скорости генератора, который является или определяемым оператором значением, или сигналом C, для последующего использования в логическом модуле 600.
Логический модуль 600 также содержит функциональный блок 658 автоматического переключения, который принимает сигнал D из функционального блока 420 (фиг.4) и значение из регистра 660 числовой константы. Регистр 660 содержит значение, предварительно определенное оператором. Функциональный блок 658 выбирает и передает сигнал N скорости высокоскоростного вала, определенной с помощью датчика Keyphasor, который является или определяемым оператором значением, или сигналом D, для последующего использования в логическом модуле 600.
Логический модуль 600 содержит функциональный блок 664 определения логического равенства, который принимает сигнал I и значение из регистра 662 числовой константы. В описываемом варианте осуществления значением в регистре 662 является цифра 6. Функциональный блок 664 также передает дискретный выходной сигнал, который равен сигналу «да», когда сигнал I и значение регистра 662 равны, т.е. оба равны 6. Альтернативно, если сигнал I и число из регистра 662 не равны, т.е. сигнал I не равен 6, то функциональный блок 664 выводит сигнал «нет». Логический модуль 600 также содержит функциональный блок 666 «логического и», который принимает сигналы «да» и сигналы «нет» из функционального блока 664, и сигнал J. Функциональный блок 666 также передает дискретные выходные данные, которые содержат или сигнал «да», или сигнал «нет». Сигнал «да» генерируют с помощью функционального блока 666, когда он принимает сигнал «да» из функционального блока 664 и сигнал «да» J из функционального блока 652. Сигнал «нет» генерируют с помощью функционального блока 666, когда он принимает сигнал «нет» из функционального блока 664 или сигнал «нет» J из функционального блока 652. Логический модуль 600 также содержит функциональный блок 670 переключения, который принимает выходные данные функционального блока 666. Функциональный блок 670 принимает сигнал N и значение числа из регистра 668 числовой константы. Функциональный блок 670 передает или сигнал N, или значение выходных данных регистра 668. Когда выходными данными функционального блока 666 является сигнал «да», сигнал N передают через функциональный блок 670 для дальнейшего использования в логическом модуле 600. Когда выходными данными функционального блока 666 является сигнал «нет», значение, содержащееся в регистре 668, передают через функциональный блок 670 для дальнейшего использования в логическом модуле 600. В примерном варианте осуществления в регистр 668 помещают нулевое значение.
Логический модуль 600 содержит функциональный блок 674 определения логического равенства, который принимает сигнал I и значение из регистра 672 числовой константы. В данном варианте осуществления значением в регистре 672 является цифра 5. Функциональный блок 674 передает дискретный выходной сигнал, который равен сигналу «да», когда сигнал I и значение регистра 672 равны, т.е. оба равны 5. Альтернативно, если сигнал I и число из регистра 672 не равны, т.е. сигнал I не равен 5, то выходными данными функционального блока 674 является сигнал «нет». Логический модуль 600 также содержит функциональный блок 676 «логического и», который принимает сигналы «да» и сигналы «нет» из функционального блока 674, и сигнал J. Функциональный блок 676 также передает дискретные выходные данные, которые содержат или сигнал «да», или сигнал «нет». Сигнал «да» генерируют с помощью функционального блока 676, когда он принимает сигнал «да» из функционального блока 674 и сигнал «да» J из функционального блока 652. Сигнал «нет» генерируют с помощью функционального блока 676, когда он принимает сигнал «нет» из функционального блока 674 или сигнал «нет» J из функционального блока 652. Логический модуль 600 также содержит функциональный блок 678 переключения, который принимает выходные данные функционального блока 676. Функциональный блок 678 также принимает сигнал P и выходные данные функционального блока 670. Функциональный блок 678 передает или сигнал P, или выходные данные функционального блока 670. Когда выходными данными функционального блока 676 является сигнал «да», сигнал P передают через функциональный блок 678 для дальнейшего использования в логическом модуле 600. Когда выходными данными функционального блока 670 является сигнал «нет», выходные данные функционального блока 670 передают через функциональный блок 678 для дальнейшего использования в логическом модуле 600.
Логический модуль 600 содержит функциональный блок 682 определения логического равенства, который принимает сигнал I и значение из регистра 680 числовой константы. В данном варианте осуществления значением в регистре 680 является цифра 4. Функциональный блок 682 передает дискретный выходной сигнал, который равен сигналу «да», когда сигнал I и значение регистра 680 равны, т.е. оба равны 4. Альтернативно, если сигнал I и число из регистра 662 не равны, т.е. сигнал I не равен 4, то выходными данными функционального блока 682 является сигнал «нет». Логический модуль 600 также содержит функциональный блок 684 «логического и», который принимает сигналы «да» и сигналы «нет» из функционального блока 682, и сигнал J. Функциональный блок 684 также передает дискретные выходные данные, которые содержат или сигнал «да», или сигнал «нет». Сигнал «да» генерируют с помощью функционального блока 684, когда он принимает сигнал «да» из функционального блока 682 и сигнал «да» J из функционального блока 652. Сигнал «нет» генерируют с помощью функционального блока 684, когда он принимает сигнал «нет» из функционального блока 682 или сигнал «нет» J из функционального блока 652.
Логический модуль 600 также содержит функциональный блок 688 переключения, который принимает выходные данные функционального блока 684. Функциональный блок 688 также принимает сигнал 686 среднего значения вычисленной скорости в об/мин наружного подшипника генератора. Функциональный блок 688 передает или сигнал 686, или выходной сигнал функционального блока 678. Когда выходным сигналом функционального блока 684 является сигнал «да», сигнал 686 передают через функциональный блок 688 для дальнейшего использования в логическом модуле 600. Когда выходными данными функционального блока 684 является сигнал «нет», выходные данные функционального блока 678 передают через функциональный блок 688 для дальнейшего использования в логическом модуле 600.
Логический модуль 600 содержит функциональный блок 692 определения логического равенства, который принимает сигнал I и значение из регистра 690 числовой константы. В данном варианте осуществления значением в регистре 690 является цифра 3. Функциональный блок 692 передает дискретный выходной сигнал, который равен сигналу «да», когда сигнал I и значение регистра 690 равны, т.е. оба равны 3. Альтернативно, если сигнал I и число из регистра 690 не равны, т.е. сигнал I не равен 3, то выходными данными функционального блока 692 является сигнал «нет». Логический модуль 600 также содержит функциональный блок 694 «логического И», который принимает сигналы «да» и сигналы «нет» из функционального блока 692, и сигнал J. Функциональный блок 694 также передает дискретные выходные данные, которые содержат или сигнал «да», или сигнал «нет». Сигнал «да» генерируют с помощью функционального блока 694, когда он принимает сигнал «да» из функционального блока 692 и сигнал «да» J из функционального блока 652. Сигнал «нет» генерируют с помощью функционального блока 694, когда он принимает сигнал «нет» из функционального блока 692 или сигнал «нет» J из функционального блока 652. Логический модуль 600 также содержит функциональный блок 698 переключения, который принимает выходные данные функционального блока 694. Функциональный блок 698 также принимает сигнал 696 среднего значения вычисленной скорости в об/мин внутреннего подшипника генератора. Функциональный блок 698 передает или сигнал 696, или выходной сигнал функционального блока 688. Когда выходными данными функционального блока 694 является сигнал «да», сигнал 696 передают через функциональный блок 698 для дальнейшего использования в логическом модуле 600. Когда выходными данными функционального блока 694 является сигнал «нет», выход функционального блока 688 передают через функциональный блок 698 для дальнейшего использования в логическом модуле 600.
Логический модуль 600 содержит функциональный блок 702 определения логического равенства, который принимает сигнал I и значение из регистра 700 числовой константы. В данном варианте осуществления значением в регистре 700 является цифра 2. Функциональный блок 702 передает дискретный выходной сигнал, который равен сигналу «да», когда сигнал I и значение регистра 700 равны, т.е. оба равны 2. Альтернативно, если сигнал I и число из регистра 700 не равны, т.е. сигнал I не равен 2, то выходными данными функционального блока 702 является сигнал «нет». Логический модуль 600 также содержит функциональный блок 704 «логического И», который принимает сигналы «да» и сигналы «нет» из функционального блока 702, и сигнал J. Функциональный блок 704 также передает дискретные выходные данные, которые содержат или сигнал «да», или сигнал «нет». Сигнал «да» генерируют с помощью функционального блока 704, когда он принимает сигнал «да» из функционального блока 702 и сигнал «да» J из функционального блока 652. Сигнал «нет» генерируют с помощью функционального блока 704, когда он принимает сигнал «нет» из функционального блока 702 или сигнал «нет» J из функционального блока 652. Логический модуль 600 также содержит функциональный блок 708 переключения, который принимает выходные данные функционального блока 704. Функциональный блок 708 также принимает сигнал 706 среднего значения вычисленной скорости в оборотах в минуту второго выходного вала. Функциональный блок 708 передает или сигнал 706, или выходной сигнал функционального блока 698. Когда выходными данными функционального блока 704 является сигнал «да», сигнал 706 передают через функциональный блок 708 для дальнейшего использования в логическом модуле 600. Когда выходными данными функционального блока 704 является сигнал «нет», выходные данные функционального блока 698 передают через функциональный блок 708 для дальнейшего использования в логическом модуле 600.
Логический модуль 600 содержит функциональный блок 712 определения логического равенства, который принимает сигнал I и значение из регистра 710 числовой константы. В данном варианте осуществления значением в регистре 710 является цифра 1. Функциональный блок 712 передает дискретный выходной сигнал, который равен сигналу «да», когда сигнал I и значение регистра 710 равны, т.е. оба равны 1. Альтернативно, если сигнал I и число из регистра 710 не равны, т.е. сигнал I не равен 1, то выходными данными функционального блока 712 является сигнал «нет». Логический модуль 600 также содержит функциональный блок 714 «логического И», который принимает сигналы «да» и сигналы «нет» из функционального блока 712, и сигнал J. Функциональный блок 714 также передает дискретный выходной сигнал, который содержит или сигнал «да», или сигнал «нет». Сигнал «да» генерируют с помощью функционального блока 714, когда он принимает сигнал «да» из функционального блока 712 и сигнал «да» J из функционального блока 652. Сигнал «нет» генерируют с помощью функционального блока 714, когда он принимает сигнал «нет» из функционального блока 712 или сигнал «нет» J из функционального блока 652. Логический модуль 600 также содержит функциональный блок 718 переключения, который принимает выходные данные функционального блока 714. Функциональный блок 718 также принимает сигнал 716 среднего значения вычисленной скорости в оборотах в минуту третьего выходного вала. Функциональный блок 718 передает или сигнал 716, или выходной сигнал функционального блока 708. Когда выходными данными функционального блока 714 является сигнал «да», сигнал 716 передают через функциональный блок 718 для дальнейшего использования в логическом модуле 600. Когда выходными данными функционального блока 704 является сигнал «нет», выходные данные функционального блока 708 передают через функциональный блок 718 для дальнейшего использования в логическом модуле 600.
Логический модуль 600 также содержит функциональный блок 722 определения логического неравенства, который принимает выходные данные функционального блока 718 и значение из регистра 720 числовой константы, который содержит определенное оператором значение. Логический модуль 600 также содержит функциональный блок 724 «логического И», который принимает сигнал из функционального блока 722 и принимает сигнал J из функционального блока 652. Когда выходные данные функционального блока 718 не равны значению, содержащемуся в регистре 720, дискретный сигнал «да» передают из функционального блока 722 в функциональный блок 724. Когда выходные данные функционального блока 718 равны значению, содержащемуся в регистре 720, дискретный сигнал «нет» передают из функционального блока 722 в функциональный блок 724. В данном варианте осуществления значение в регистре 720 равно нулю. Когда функциональный блок 724 принимает сигнал «да» из функционального блока 722 и сигнал «да» J из функционального блока 652, дискретный сигнал «да» передают в функциональный блок 730 переключения. Когда функциональный блок 724 принимает сигнал «нет» из функционального блока 722 или сигнал «нет» J из функционального блока 652, дискретный сигнал «нет» передают в функциональный блок 730.
Логический модуль 600 также содержит функциональный блок 728 умножения, который принимает сигнал F и значение из регистра 726 константы коэффициента увеличения скорости всего редуктора. Функциональный блок 728 дополнительно конфигурируют для умножения сигнала F на заданное значение в регистре 726 и передачи выходного сигнала в функциональный блок 730. Функциональный блок 730 также принимает выходной сигнал из функционального блока 718. Когда функциональный блок 730 принимает сигнал «да» из функционального блока 724, выходной сигнал функционального блока 718 передают в регистр 732 как скорость механизма для первого выходного вала. Когда функциональный блок 730 принимает сигнал «нет» из функционального блока 724, выходной сигнал функционального блока 728 передают в регистр 732 как скорость механизма.
При работе функциональный блок 602 передает сигнал B в функциональный блок 604. Функциональный блок 504 передает сигнал E в функциональный блок 604. Сигнал B и сигнал E сравнивают и генерируют разностный сигнал 605 временных меток. Сигнал 605 является разностью между сигналом B и сигналом E. Сигнал 605 передают в функциональный блок 606, в котором определяют абсолютную величину сигнала 605. Абсолютную величину сигнала 605 затем передают в регистр «значения 1» (не показан) в буфере 636 выборки для временного хранения.
Точно так же функциональный блок 608 передает сигнал G в функциональный блок 610. Функциональный блок 504 передает сигнал E в функциональный блок 610. Сигнал G и сигнал E сравнивают и генерируют разностный сигнал 611 временных меток. Сигнал 611 является разностью между сигналом G и сигналом E. Сигнал 611 передают в функциональный блок 612, в котором определяют абсолютную величину сигнала 611. Абсолютную величину сигнала 611 затем передают в регистр «значения 2» (не показан) в буфере 636 выборки для временного хранения.
Точно так же функциональный блок 614 передает сигнал L в функциональный блок 616. Функциональный блок 504 передает сигнал E в функциональный блок 616. Сигнал L и сигнал E сравнивают и генерируют разностный сигнал 617 временных меток. Сигнал 617 является разностью между сигналом L и сигналом E. Сигнал 617 передают в функциональный блок 618, в котором определяют абсолютную величину сигнала 617. Абсолютную величину сигнала 617 затем передают в регистр «значения 3» (не показан) в буфере 636 выборки для временного хранения.
Точно так же функциональный блок 620 передает сигнал М в функциональный блок 622. Функциональный блок 504 передает сигнал E в функциональный блок 622. Сигнал М и сигнал E сравнивают и генерируют разностный сигнал 623 временных меток. Сигнал 623 является разностью между сигналом М и сигналом E. Сигнал 623 передают в функциональный блок 624, в котором определяют абсолютную величину сигнала 623. Абсолютную величину сигнала 623 затем передают в регистр «значения 4» (не показан) в буфере 636 выборки для временного хранения.
Точно так же функциональный блок 414 передает сигнал C в функциональный блок 654 автоматического переключения, в котором сигнал C сравнивают со значением, хранящимся в регистре 656. Или сигнал C, или предварительно определенное значение регистра 656 передают как сигнал P из функционального блока 654 автоматического переключения в функциональный блок 678 для использования, описанного дополнительно ниже. Функциональный блок 414 также генерирует сигнал H и передает сигнал H в функциональный блок 628. Сигнал H и сигнал E сравнивают и генерируют разностный сигнал 629 временных меток. Сигнал 629 является разностью между сигналом H и сигналом E. Сигнал 629 передают в функциональный блок 630, в котором определяют абсолютную величину сигнала 629. Абсолютную величину сигнала 629 затем передают в регистр «значения 5» (не показан) в буфере 636 выборки для временного хранения.
Точно так же функциональный блок 420 передает сигнал D к автоматическому переключателю 658, в котором сигнал D сравнивают со значением, хранящимся в регистре 660. Или сигнал D, или предварительно определенное значение в регистре 660 передают как сигнал N из автоматического переключателя 658 в функциональный блок 670 для использования, описанного дополнительно ниже. Функциональный блок 420 также генерирует сигнал K и передает сигнал K в функциональный блок 632. Сигнал K и сигнал E сравнивают и генерируют разностный сигнал 633 временных меток. Сигнал 633 является разностью между сигналом K и сигналом E. Сигнал 633 передают в функциональный блок 634, в котором определяют абсолютную величину сигнала 633. Абсолютную величину сигнала 633 затем передают в регистр «значения 6» (не показан) в буфере 636 выборки для временного хранения.
Сигналы B, G, L, M, E, H и K генерируют и передают, как описано выше, в случайном порядке. Поэтому регистры в буфере 636 выборки, которые соответствуют «значению 1», «значению 2», «значению 3», «значению 4», «значению 5» и «значению 6», заполняют соответствующими сигналами также случайно. Функциональный блок 638 обеспечивает передачу наименьшего значения из значений с «значения 1» по «значение 6» (т.е. нового сигнала временной метки). Буфер 636 выборки передает сигнал I к функциональным блокам 664, 674, 682, 692, 702 и 712 для использования, как описано позже.
Функциональный блок 640, функциональный блок 642, функциональный блок 646, регистры 644 и 648 и функциональный блок 650 совместно используют для генерации сигнала предварительно определенной амплитуды значений временных меток, который передают в функциональный блок 652. Функциональный блок 652 принимает сигнал 639, который передают из функционального блока 638, и определяет, находится ли значение, связанное с сигналом 639, в пределах указанной выше предварительно определенной амплитуды. Если значение находится в пределах предварительно определенной амплитуды, то дискретный сигнал J передают к функциональным блокам 666, 676, 684, 694, 704, 714 и 724, как описано дополнительно ниже.
Сигнал I принимают в функциональный блок 664, в котором сигнал I сравнивают с цифрой 6 в регистре 662. Цифра 6 соответствует регистру в буфере 636 выборки, содержащему «значение 6». Если сигнал I не соответствует цифре 6, то сигнал «нет» передают в функциональный блок 666. Если сигнал I соответствует цифре 6, то сигнал «да» передают в функциональный блок 666. Если значение сигнала 639 находится в пределах предварительно определенной амплитуды, как описано выше, то дискретный сигнал J, который содержит сигнал «да», передают в функциональный блок 666. Иначе, дискретный сигнал J, который содержит сигнал «нет», передают в функциональный блок 666. Когда функциональный блок 666 принимает по меньшей мере один дискретный сигнал «нет», сигнал «нет» передают в функциональный блок 670, и сигнал с численным значением нуля, который содержится в регистре 668, передают из функционального блока 670 в функциональный блок 678. Когда функциональный блок 666 принимает два дискретных сигнала «да», сигнал «да» передают в функциональный блок 670, и функциональный блок 670 передает сигнал N в функциональный блок 678.
Точно так же сигнал I принимают в функциональный блок 674, в котором сигнал I сравнивают с цифрой 5 в регистре 672. Цифра 5 соответствует регистру в буфере 636 выборки, содержащему «значение 5». Если сигнал I не соответствует цифре 5, то сигнал «нет» передают в функциональный блок 676. Если сигнал I соответствует цифре 5, то сигнал «да» передают в функциональный блок 676. Если значение сигнала 639 находится в пределах предварительно определенной амплитуды, как описано выше, то дискретный сигнал J, который содержит сигнал «да», передают в функциональный блок 676. Иначе, дискретный сигнал J, который содержит сигнал «нет», передают в функциональный блок 676. Когда функциональный блок 676 принимает по меньшей мере один дискретный сигнал «нет», сигнал «нет» передают в функциональный блок 678, и сигнал, который передают из функционального блока 670 (т.е. или нуль, или сигнал N), как описано выше, передают через функциональный блок 678 в функциональный блок 688. Когда функциональный блок 676 принимает два дискретных сигнала «да», сигнал «да» передают в функциональный блок 678, и функциональный блок 678 передает сигнал P в функциональный блок 688.
Точно так же сигнал I принимают в функциональный блок 682, в котором сигнал I сравнивают с цифрой 4 в регистре 680. Цифра 4 соответствует регистру в буфере 636 выборки, содержащему «значение 4». Если сигнал I не соответствует цифре 4, то сигнал «нет» передают в функциональный блок 684. Если сигнал I соответствует цифре 4, то сигнал «да» передают в функциональный блок 684. Если значение сигнала 639 находится в пределах предварительно определенной амплитуды, как описано выше, то дискретный сигнал J, который содержит сигнал «да», передают в функциональный блок 684. Иначе, дискретный сигнал J, который содержит сигнал «нет», передают в функциональный блок 684. Когда функциональный блок 684 принимает по меньшей мере один дискретный сигнал «нет», сигнал «нет» передают в функциональный блок 688, и сигнал, который передают из функционального блока 678 (т.е. или нуль, или сигнал N, или сигнал P), как описано выше, передают через функциональный блок 688 в функциональный блок 698. Когда функциональный блок 684 принимает два дискретных сигнала «да», сигнал «да» передают в функциональный блок 688, и функциональный блок 688 передает сигнал, эквивалентный значению сигнала 686 (т.е. сигнала среднего значения вычисленной скорости наружного подшипника генератора в оборотах в минуту), в функциональный блок 698. Сигнал 686 эквивалентен сигналу А, переданному из регистра 412 (оба показаны на фиг.4), связанного с логическим модулем 400, который дополнительно связан с высокоскоростным акселерометром 370. В модуле 600 используют сигнал 686 средней скорости в оборотах в минуту, так как тихоходные акселерометры 360 и 362 обычно генерируют менее точные сигналы скорости из-за более низкой угловой скорости валов 134 и 332 по сравнению с более высокой угловой скоростью валов 334, 336 и 138. Поэтому сигнал, включающий в себя среднее значение выходных данных от акселерометра 370, обычно обеспечивает более точное определение угловой скорости вала 138 по сравнению с любым сигналом вычисленной скорости вала 138 от акселерометров 360 и 362.
Точно так же сигнал I принимают в функциональный блок 692, в котором сигнал I сравнивают с цифрой 3 в регистре 690. Цифра 3 соответствует регистру в буфере 636 выборки, содержащему «значение 3». Если сигнал I не соответствует цифре 3, то сигнал «нет» передают в функциональный блок 694. Если сигнал I соответствует цифре 3, то сигнал «да» передают в функциональный блок 694. Если значение сигнала 639 находится в пределах предварительно определенной амплитуды, как описано выше, то дискретный сигнал J, который содержит сигнал «да», передают в функциональный блок 694. Иначе, дискретный сигнал J, который содержит сигнал «нет», передают в функциональный блок 694. Когда функциональный блок 694 принимает по меньшей мере один дискретный сигнал «нет», сигнал «нет» передают в функциональный блок 698, и сигнал, который передают из функционального блока 688 (т.е. или нуль, или сигнал N, или сигнал P, или сигнал среднего значения вычисленной скорости в оборотах в минуту внешнего подшипника генератора), как описано выше, передают через функциональный блок 698 в функциональный блок 708. Когда функциональный блок 694 принимает два дискретных сигнала «да», сигнал «да» передают в функциональный блок 698, и функциональный блок 698 передает сигнал, эквивалентный значению сигнала 696 (т.е. сигнал среднего значения вычисленной скорости в оборотах в минуту внутреннего подшипника генератора) в функциональный блок 708. Сигнал 696 эквивалентен сигналу А, переданному из регистра 412, связанного с логическим модулем 400, который дополнительно связан с высокоскоростным акселерометром 368. В модуле 600 используют сигнал 696 среднего значения скорости в оборотах в минуту, так как тихоходные акселерометры 360 и 362 обычно генерируют менее точные сигналы скорости из-за более низкой угловой скорости валов 134 и 332 по сравнению с более высокой угловой скоростью валов 334, 336 и 138. Поэтому сигнал, включающий в себя среднее значение выходных данных от акселерометра 368, обычно обеспечивает более точное определение угловой скорости вала 138 по сравнению с любым сигналом вычисленной скорости вала 138 от акселерометров 360 и 362.
Точно так же сигнал I принимают в функциональный блок 702, в котором сигнал I сравнивают с цифрой 2 в регистре 700. Цифра 2 соответствует регистру в буфере 636 выборки, содержащему «значение 2». Если сигнал I не соответствует цифре 2, то сигнал «нет» передают в функциональный блок 704. Если сигнал I соответствует цифре 2, то сигнал «да» передают в функциональный блок 704. Если значение сигнала 639 находится в пределах предварительно определенной амплитуды, как описано выше, то дискретный сигнал J, который содержит сигнал «да», передают в функциональный блок 704. Иначе, дискретный сигнал J, который содержит сигнал «нет», передают в функциональный блок 704. Когда функциональный блок 704 принимает по меньшей мере один дискретный сигнал «нет», сигнал «нет» передают в функциональный блок 708, и сигнал, который передают из функционального блока 698 (т.е. или нуль, или сигнал N, или сигнал P, или сигнал среднего значения вычисленной скорости в оборотах в минуту внешнего подшипника генератора, или сигнал среднего значения вычисленной скорости в оборотах в минуту внутреннего подшипника генератора), как описано выше, передают через функциональный блок 708 в функциональный блок 718. Когда функциональный блок 704 принимает два дискретных сигнала «да», сигнал «да» передают в функциональный блок 708, и функциональный блок 708 передает сигнал, эквивалентный значению сигнала 706 (т.е. сигнала среднего значения вычисленной скорости в оборотах в минуту второго выходного вала), в функциональный блок 718. Сигнал 706 эквивалентен сигналу А, переданному из регистра 412, связанному с логическим модулем 400, который дополнительно связан с высокоскоростным акселерометром 364. В модуле 600 используют сигнал 706 среднего значения скорости в оборотах в минуту, так как тихоходные акселерометры 360 и 362 обычно генерируют менее точные сигналы скорости из-за более низкой угловой скорости валов 134 и 332, по сравнению с более высокой угловой скоростью валов 334, 336 и 138. Поэтому сигнал, включающий в себя среднее значение выходных данных от акселерометра 364, обычно обеспечивает более точное определение угловой скорости вала 138 по сравнению с любым сигналом вычисленной скорости вала 138 от акселерометров 360 и 362.
Точно так же сигнал I принимают в функциональном блоке 712, в котором сигнал I сравнивают с цифрой 1 в регистре 710. Цифра 1 соответствует регистру в буфере 636 выборки, содержащему «значение 1». Если сигнал I не соответствует цифре 1, то сигнал «нет» передают в функциональный блок 714. Если сигнал I соответствует цифре 1, то сигнал «да» передают в функциональный блок 714. Если значение сигнала 639 находится в пределах предварительно определенной амплитуды, как описано выше, то дискретный сигнал J, который содержит сигнал «да», передают в функциональный блок 714. Иначе, дискретный сигнал J, который содержит сигнал «нет», передают в функциональный блок 714. Когда функциональный блок 714 принимает по меньшей мере один дискретный сигнал «нет», сигнал «нет» передают в функциональный блок 718, и сигнал, который передают из функционального блока 708 (т.е. или нуль, или сигнал N, или сигнал P, или сигнал среднего значения вычисленной скорости в оборотах в минуту наружного подшипника генератора, или сигнал среднего значения вычисленной скорости в оборотах в минуту внутреннего подшипника генератора, или сигнал среднего значения вычисленной скорости в оборотах в минуту второго выходного вала), как описано выше, передают через функциональный блок 718 к функциональным блокам 722 и 730. Когда функциональный блок 714 принимает два дискретных сигнала «да», сигнал «да» передают в функциональный блок 718, и функциональный блок 718 передает сигнал, эквивалентный значению сигнала 716 (т.е. сигнал среднего значения вычисленной скорости в оборотах в минуту третьего выходного вала), к функциональным блокам 722 и 730. Сигнал 716 эквивалентен сигналу А, переданному из регистра 412, связанного с логическим модулем 400, который дополнительно связан с высокоскоростным акселерометром 366. В модуле 600 используют сигнал 716 среднего значения скорости в оборотах в минуту, так как тихоходные акселерометры 360 и 362 обычно генерируют менее точные сигналы скорости из-за более низкой угловой скорости валов 134 и 332 по сравнению с более высокой угловой скоростью валов 334, 336 и 138.
Поэтому сигнал, включающий в себя среднее значение выходных данных от акселерометра 366, обычно обеспечивает более точное определение угловой скорости вала 138 по сравнению с любым сигналом вычисленной скорости вала 138 от акселерометров 360 и 362.
Функциональный блок 722 принимает сигнал, переданный из функционального блока 718, как описано выше, и функциональный блок 722 определяет, равно или не равно значение из функционального блока 718 предварительно определенному числовому значению, содержащемуся в регистре 720. В примерном варианте осуществления регистр 720 содержит нулевое числовое значение. Если значения не равны (т.е. число, принятое из функционального блока 718, не имеет нулевого значения, которое появилось в регистре 668), то дискретный сигнал «да» передают в функциональный блок 724. Иначе, если значения равны, то дискретный сигнал «нет» передают в функциональный блок 724. Если все значения временных меток, содержащиеся в шести регистрах в буфере 636 выборки, превысят предварительно определенную амплитуду, то нулевое числовое значение, появившееся в регистре 668, распространится до функционального блока 722. Нулевое числовое значение не используют для определения скорости механизма для диагностических целей. Напротив, функциональный блок 728 умножает сигнал F на числовое значение, содержащееся в регистре 726, для определения приблизительной угловой скорости вала 138, которую передают в функциональный блок 730. Если функциональный блок 724 принимает по меньшей мере один дискретный сигнал «нет», то приблизительную угловую скорость вала 138 передают в регистр 732 для определения скорости механизма для диагностических целей.
Предлагаемые способ и устройство для управления генератором с приводом от ветряного двигателя обеспечивают работу генератора с приводом от ветряного двигателя. Более конкретно, система контроля вибрации, которая описана выше, обеспечивает действенную и эффективную схему выработки электроэнергии. Кроме того, система контроля вибрации уменьшает погрешность точности измерений вибрации отдельных компонентов генератора с приводом от ветряного двигателя, и впоследствии анализ вибрации компонентов можно делать с большей уверенностью. Поэтому такая система обеспечивает надежность соответствующего генератора с приводом от ветряного двигателя.
Выше подробно описаны примерные варианты осуществления систем контроля вибрации, которые связаны с генераторами с приводом от ветряного двигателя. Способы, устройства и системы не ограничены ни описанными отдельными вариантами осуществления, ни отдельной иллюстрированной системой контроля вибрации.
Хотя изобретение описано в терминах различных отдельных вариантов осуществления, специалистам ясно, что изобретение может воплощаться с изменениями в пределах объема и формы формулы изобретения.
ПЕРЕЧЕНЬ НАИМЕНОВАНИЙ БЛОКОВ,
УКАЗАННЫХ НА СОПРОВОДИТЕЛЬНЫХ ЧЕРТЕЖАХ
Изобретение относится к области электротехники и может быть использовано в устройствах контроля ветряных двигателей. Техническим результатом является обеспечение одновременной записи, передачи и/или обработки данных скорости и вибрации компонентов. Система (300) контроля механизма включает, по меньшей мере, один подвижный элемент, содержит, по меньшей мере, один датчик (372, 374) для генерации, по меньшей мере, одного сигнала измеренной скорости подвижного элемента и, по меньшей мере, один процессор (382), связанный по системе передачи данных с датчиком. По меньшей мере один процессор сконфигурирован для генерации множества сигналов измеренной скорости с временными метками, по меньшей мере, для одного подвижного элемента и дополнительно конфигурирован для определения приоритетов множества сигналов измеренной скорости с временными метками как функции, по меньшей мере, одного предварительно определенного временного значения. 2 н. и 8 з.п. ф-лы, 6 ил.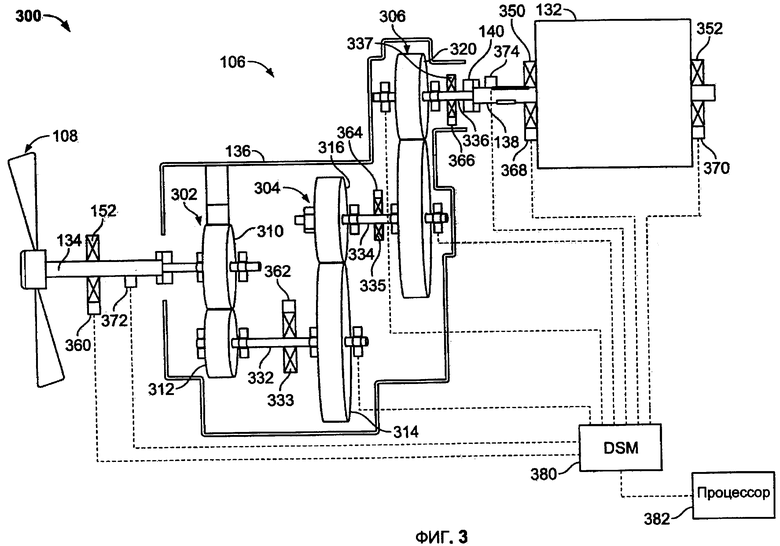
1. Система контроля механизма, включающего в себя по меньшей мере один подвижный элемент, содержащая, по меньшей мере, один датчик (372, 374) для формирования по меньшей мере одного сигнала измеренной скорости подвижного элемента, и по меньшей мере один процессор (382), связанный по системе передачи данных с указанным датчиком и предназначенный для генерирования множества сигналов измеренной скорости с временными метками по меньшей мере одного подвижного элемента, указанный процессор дополнительно предназначен для определения приоритетов множества сигналов измеренной скорости с временными метками как функции по меньшей мере одного предварительно определенного временного значения.
2. Система по п.1, отличающаяся тем, что указанный, по меньшей мере, один датчик (372, 374) содержит, по меньшей мере, один акселерометр (360, 362, 364, 366, 368, 370) и, по меньшей мере, один датчик скорости.
3. Система по п.1, отличающаяся тем, что указанный по меньшей мере один процессор (382) конфигурирован для формирования по меньшей мере одного сигнала из группы, состоящей из: сигнала начальной измеренной скорости (об/мин) с временными метками; сигнала измеренной средней скорости в об/мин с временными метками; сигнала измеренной скорости подвижного элемента с временными метками; сигнала измеренной скорости с временными метками от высокоскоростного датчика Keyphasor и сигнала измеренной скорости с временными метками от тихоходного датчика Keyphasor.
4. Система по п.3, отличающаяся тем, что указанный, по меньшей мере, один процессор (382) конфигурирован для передачи сигнала скорости подвижного элемента, который по существу равен нулю всякий раз, когда значение, по меньшей мере, одного из сигнала начальной измеренной скорости в оборотах в минуту с временными метками, сигнала измеренной скорости с временными метками от высокоскоростного датчика Keyphasor и сигнала измеренной скорости с временными метками подвижного элемента превышает по меньшей мере одно предварительно определенное временное значение.
5. Система по п.1, отличающаяся тем, что указанный, по меньшей мере, один процессор (382) дополнительно конфигурирован для генерирования сигнала вычисленной скорости подвижного элемента, используя, по меньшей мере, один предварительно определенный алгоритм.
6. Система по п.5, отличающаяся тем, что указанный, по меньшей мере, один процессор (382) конфигурирован для генерирования сигнала вычисленной скорости подвижного элемента, когда, по меньшей мере, одно значение с временными метками превышает, по меньшей мере, одно предварительно определенное временное значение.
7. Система по п.1, отличающаяся тем, что указанный, по меньшей мере, один процессор (382) дополнительно конфигурирован для выполнения этапов приема множества сигналов измеренной скорости от, по меньшей мере, одного датчика (372, 374); назначения значения временной метки каждому из множества сигналов измеренной скорости для генерации множества сигналов измеренной скорости с временными метками; определения приоритетов множества сигналов измеренной скорости с временными метками и передачи, по меньшей мере, одного сигнала измеренной скорости с временными метками с назначенным приоритетом.
8. Генератор с приводом от ветряного двигателя, содержащий, по меньшей мере, один вращающийся элемент, систему (300) контроля, содержащую, по меньшей мере, один датчик (372, 374), для генерации, по меньшей мере, одного сигнала измеренной скорости подвижного элемента и, по меньшей мере, один процессор (382), связанный по системе электронной передачи данных с датчиком, причем, по меньшей мере, один процессор конфигурирован для генерирования множества сигналов измеренной скорости с временными метками для указанного, по меньшей мере, одного подвижного элемента, и дополнительно конфигурирован для определения приоритетов множества сигналов измеренной скорости с временными метками.
9. Генератор с приводом от ветряного двигателя по п.8, отличающийся тем, что указанный, по меньшей мере, один вращающийся элемент содержит, по меньшей мере, один элемент, выбранный из группы состоящей из: входного вала (138) редуктора, коренного подшипника (152), связанного с возможностью вращения с указанным входным валом редуктора; входной шестерни (310) редуктора, связанной с возможностью вращения с указанным входным валом редуктора; промежуточной шестерни (304) редуктора, связанной с возможностью вращения с указанной входной шестерней редуктора; выходной шестерни (306) редуктора, связанной с возможностью вращения с указанной промежуточной шестерней редуктора; выходного вала (334) редуктора, связанного с возможностью вращения с указанной выходной шестерней редуктора; внутреннего подшипника (350) генератора, связанного с возможностью вращения с указанным выходным валом редуктора; и наружного подшипника (352) генератора, связанного с возможностью вращения с указанным выходным валом редуктора.
10. Генератор с приводом от ветряного двигателя по п.8, отличающийся тем, что указанный, по меньшей мере, один датчик (372, 374) содержит, по меньшей мере, один акселерометр (360, 362, 364, 366, 368, 370) и, по меньшей мере, один датчик скорости.
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЗУБЧАТЫХ ПЕРЕДАЧ | 1994 |
|
RU2073837C1 |
| СПОСОБ ДИАГНОСТИКИ ТРАНСМИССИОННЫХ ПОДШИПНИКОВ ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2110054C1 |
| Электронные весы | 1989 |
|
SU1642257A1 |
| ЭЛЕКТРОМАГНИТНОЕ ПРИВОДНОЕ УСТРОЙСТВО | 2010 |
|
RU2466472C2 |
| US 20050276696 A1, 15.12.2005 | |||
| DE 19534404 A1, 15.12.2005 | |||
| JP 63140963 A, 13.06.1988 | |||
| Поливная установка | 1989 |
|
SU1705492A1 |
| WO 2005047999 A1, 26.05.2005. | |||

