Уровень техники
Общая область применения вариантов осуществления, представленных в настоящем документе, ориентирована на моделирование диагностики авиадвигателей и, в частности, на систему, устройство и способ моделирования нескольких акселерометров для диагностики авиадвигателя и компонентов двигателя.
Существующие решения по диагностике авиадвигателей включают диагностику летательного аппарата для летных испытаний путем добавления или удаления балансировочных грузов к вентилятору и турбине низкого давления. Недостатки этого способа диагностики состоят в том, что он дорог, поскольку требует сжигания топлива во время диагностики, дополнительного времени для добавления и удаления грузов и повышает вероятность повреждения двигателя и летательного аппарата для летных испытаний. Другой способ включает генерирование сигналов с помощью генератора сигналов для измерения вибрации быстросменным блоком (LRU). Однако недостатки этого способа включают требование расчета вручную для каждого условия испытаний, а также то, что зараз может быть генерирован один сигнал, что ограничивает оценку только одним типом вибрации в каждый момент времени. Этот способ также требует ручного управления и подтверждения правильности каждого условия испытаний.
Необходима система диагностики, позволяющая генерировать сигналы акселерометров, которые воспроизводят комплексность нескольких акселерометров авиадвигателя в условиях эксплуатации таким образом, чтобы генерировать эти сигналы в управляемых условиях лабораторных испытаний. Настоящее изобретение представлено исходя из этих и других соображений.
Сущность изобретения
Следует понимать, что сущность настоящего изобретения предусмотрена для ознакомления с выбором концепций в упрощенной форме, которые дополнительно описаны далее в Подробном описании. Сущность изобретения не подразумевает использование для ограничения объема заявленного объекта изобретения.
В одном варианте осуществления, описанном в настоящем документе, система моделирования акселерометров для диагностики двигателя содержит множество смодулированных акселерометров и блок контроля, который принимает текущий заряд в качестве выходного сигнала моделирования вибрации от каждого смоделированного акселерометра для измерения смоделированной общей вибрации двигателя. Каждый смоделированный акселерометр включает в себя имитатор двигателя, который генерирует множество выходных сигналов имитатора двигателя, и имитатор сигналов акселерометра, который принимает выходные сигналы имитатора двигателя и генерирует множество выходных сигналов имитатора сигналов акселерометра. Смоделированный акселерометр дополнительно содержит генератор сигнала акселерометра, который принимает выходные сигналы имитатора сигналов акселерометра и синхронизирует по меньшей мере один из выходных сигналов имитатора сигналов акселерометра с опорным сигналом из выходных сигналов имитатора двигателя, причем генератор сигналов акселерометра генерирует множество выходных сигналов. Смоделированный акселерометр дополнительно содержит секцию фильтров, которая принимает и отфильтровывает шум от выходных сигналов генератора акселерометра для генерирования множества отфильтрованных выходных сигналов генератора акселерометра. Микшер принимает и комбинирует каждый из отфильтрованных выходных сигналов генератора акселерометра для генерирования одиночного отфильтрованного выходного сигнала генератора акселерометра. Преобразователь заряда принимает и преобразует одиночный отфильтрованный выходной сигнал генератора акселерометра в выходной сигнал имитации вибрации текущего заряда.
В другом описанном в настоящем документе варианте осуществления смоделированный акселерометр двигателя содержит имитатор двигателя, который генерирует множество выходных сигналов имитатора двигателя, и имитатор сигналов акселерометра, который принимает выходные сигналы имитатора двигателя и генерирует множество выходных сигналов имитатора сигналов акселерометра. Имитатор двигателя дополнительно содержит генератор сигналов акселерометра, который принимает выходные сигналы имитатора сигналов акселерометра и синхронизирует по меньшей мере один из выходных сигналов имитатора сигналов акселерометра с опорным сигналом от одного из выходных сигналов имитатора двигателя, причем генератор сигналов акселерометра генерирует множество выходных сигналов генератора сигналов акселерометра. Смоделированный акселерометр дополнительно содержит секцию фильтров, которая принимает и отфильтровывает шум от выходных сигналов генератора акселерометра для генерирования множества отфильтрованных выходных сигналов генератора акселерометра. Имитатор двигателя дополнительно содержит микшер, который принимает и комбинирует каждый из отфильтрованных выходных сигналов генератора акселерометра для генерирования одиночного отфильтрованного выходного сигнала генератора акселерометра, и преобразователь заряда, который принимает и преобразует одиночный отфильтрованный выходной сигнал генератора акселерометра в выходной сигнал смоделированной вибрации текущего заряда.
В другом описанном в настоящем документе варианте осуществления способ диагностики смоделированной вибрации двигателя включает генерирование множества выходных сигналов имитатора двигателя, генерирование множества выходных сигналов имитатора сигналов акселерометров на основе выходных сигналов имитатора двигателя и синхронизацию по меньшей мере одного из выходных сигналов имитатора сигналов акселерометров с опорным сигналом от одного из выходных сигналов имитатора двигателя для генерирования множества выходных сигналов генератора сигналов акселерометров. Способ дополнительно включает фильтрацию шума выходных сигналов генератора сигналов акселерометров и генерацию множества отфильтрованных выходных сигналов генератора сигналов акселерометров, комбинирование каждого из отфильтрованных выходных сигналов генератора сигналов акселерометров для генерирования одиночного отфильтрованного выходного сигнала генератора сигналов акселерометров и преобразование одиночного отфильтрованного выходного сигнала генератора сигналов акселерометров в выходной сигнал имитации вибрации текущего заряда.
Обсуждаемые особенности, функции и преимущества могут быть достигнуты независимо в различных вариантах осуществления настоящего изобретения или могут быть скомбинированы в других вариантах осуществления, дополнительные детали которых могут быть понятны из прилагаемого описания и чертежей.
Краткое описание чертежей
Представленные в настоящем документе варианты осуществления будут более понятны из подробного описания и прилагаемых чертежей, среди которых:
на фиг.1 показан самолет с турбореактивным двигателем по представленному в настоящем документе предпочтительному варианту осуществления;
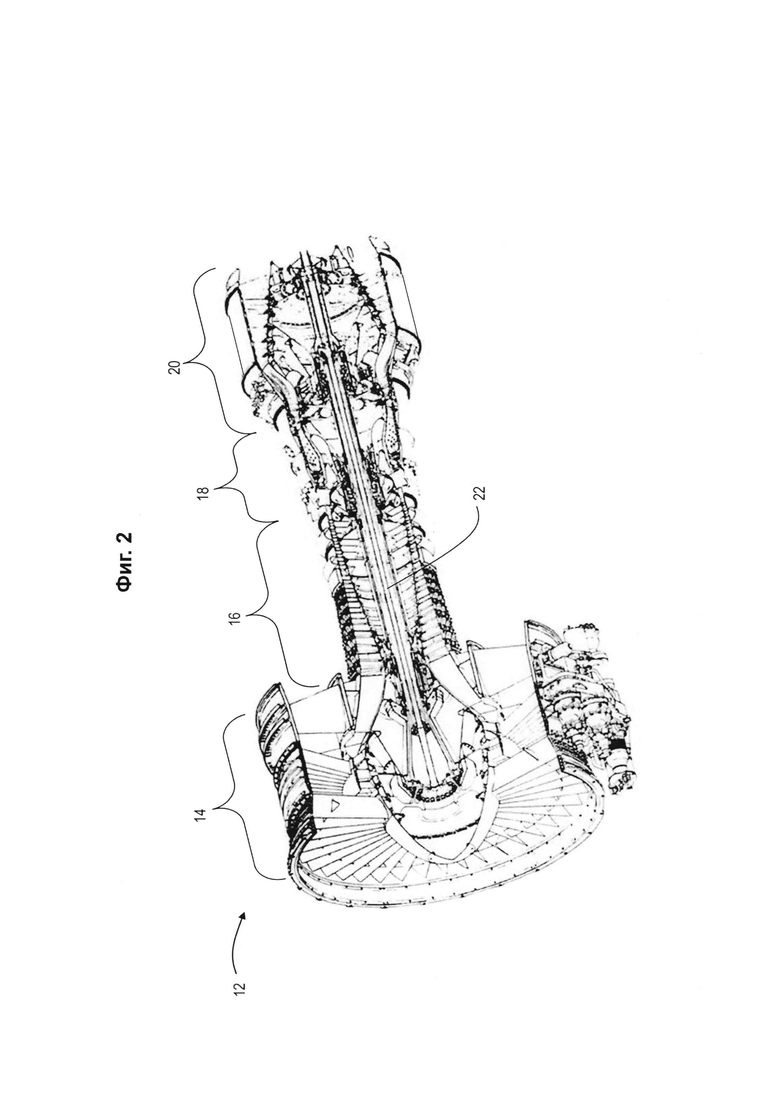
на фиг.2 показан вид в перспективе в разрезе турбореактивного двигателя, показанного на фиг.1, по представленному в настоящем документе предпочтительному варианту осуществления;
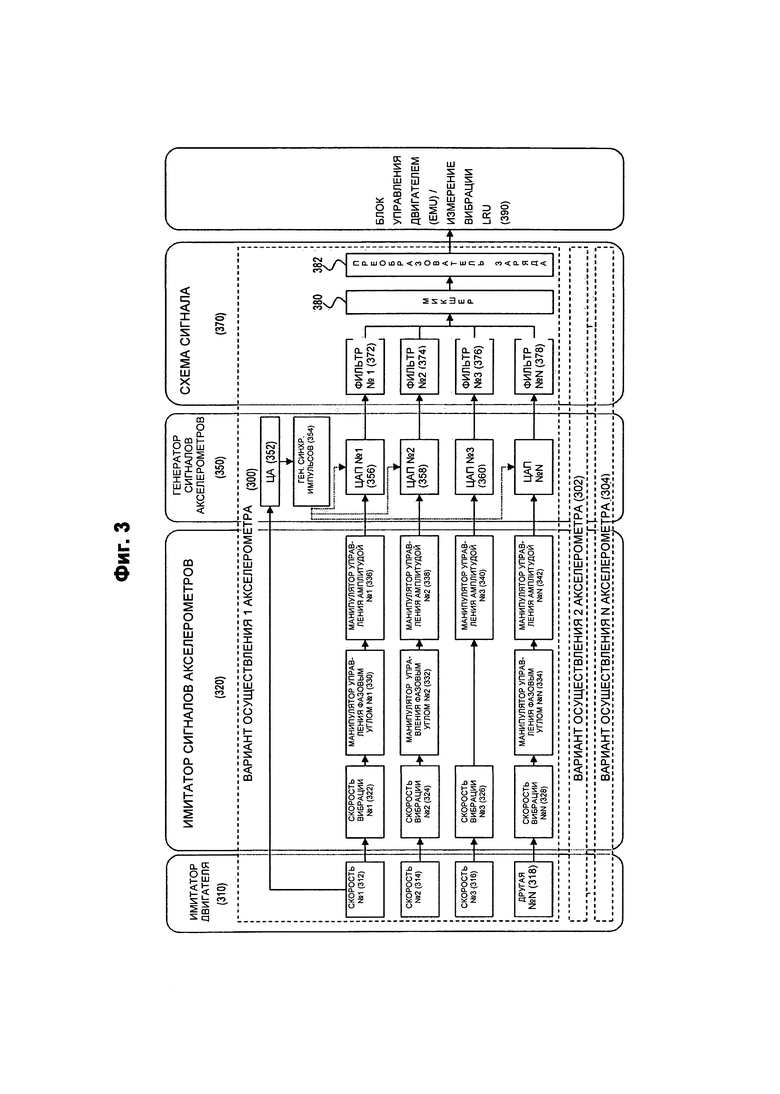
на фиг.3 показан один вариант осуществления системы моделирования акселерометров для диагностики авиадвигателя по меньшей мере по одному представленному в настоящем документе варианту осуществления;
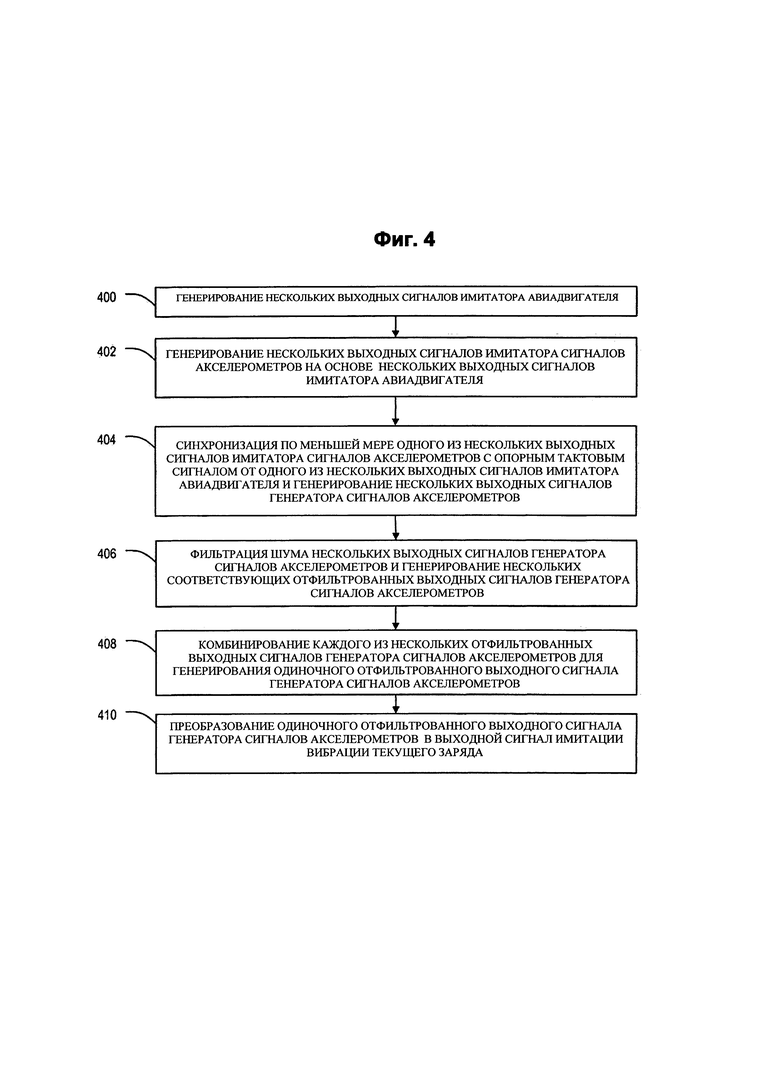
на фиг.4 показана логическая блок-схема одного варианта осуществления способа диагностики смоделированного акселерометра авиадвигателя по меньшей мере по одному представленному в настоящем документе варианту осуществления; и
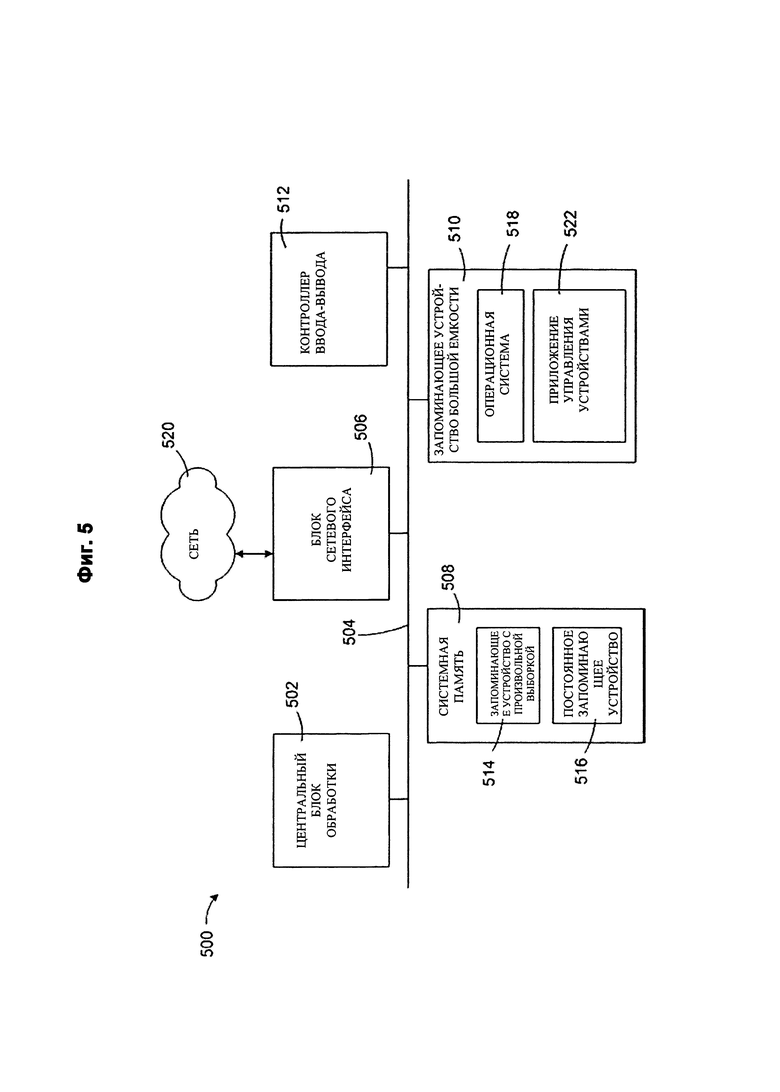
на фиг.5 показана схема архитектуры компьютера для иллюстративной архитектуры аппаратного и программного обеспечения компьютера для компьютерной системы, позволяющей осуществить представленные в настоящем документе варианты осуществления.
Подробное описание
Следующее подробное описание ориентировано на создание системы, которая дает максимальную возможность комплексной диагностики самолета посредством быстросменного блока (LRU), который контролирует вибрацию двигателя. Типичные LRU, которые обладают этой функцией, включают монитор полетной вибрации (AVM), установленный в комплексе бортового радиоэлектронного оборудования самолета, блок управления двигателем (EMU), смонтированный на двигателе, и бортовую систему контроля и диагностики (HUMS) в винтокрылом летательном аппарате, хотя этот список LRU не является исчерпывающим и существует альтернативная семантика. Конструкция этой системы может быть применена или специально приспособлена для аналогичных LRU, установленных на других двигателях/типах самолетов/винтокрылых летательных аппаратах. Комплексная диагностика самолета сфокусирована на валидации и верификации индикаторов двигателя, событий, сообщений, а также взаимодействие с диагностическими и прогностическими операциями обслуживания, связанными с системой вибрации двигателя. LRU использует акселерометры для измерения вибрации в авиадвигателе 12. Как показано на фиг.1 и 2, самолет 10 имеет один или более двигателей 12, 14, 16, которые сжигают топливо с воздухом для создания тяги и движения самолета 10 в воздухе. Например, двигатель 12 может быть турбореактивным, турбовентиляторным или любым двигателем с вращающимися частями или без них. Например, на фиг.2 показан репрезентативный турбовентиляторный реактивный двигатель 12, содержащий секцию 14 вентилятора, секцию 16 компрессора, секцию 18 камеры сгорания и секцию 20 турбины. Секция 14 вентилятора, секция 16 компрессора и секция 20 турбины смонтированы на концентрически расположенных валах 22. Двигатель 12 может состоять из одного или более валов. Следует отметить, что эти валы необязательно могут быть концентрическими относительно друг друга и что скорость какого-либо из валов необязательно не зависит от скорости какого-либо из других валов. Вращающиеся компоненты, связанные с валом, такие как соединительные муфты и коробки приводов (не показаны), могут вращаться со скоростями, отличными от скоростей валов. Хотя турбовентиляторный реактивный двигатель 12 является примером применения описанных в настоящем документе системы и способа, для достижения преимуществ описанной системы и способа могут быть использованы многие другие типы двигателей.
Комплексная диагностика самолета требует мониторинга вибрации со спектром «tracked orders», широкополосной вибрации и балансировки двигателя. Комплексная диагностика отслеживания вибрации со спектром «tracked orders» требует возможности независимого управления величиной вибраций, испытываемых несколькими акселерометрами, расположенными в разных местах двигателя 12 у различных секций, например, секции 14 вентилятора, секции 16 компрессора и секции 20 турбины. Балансировка двигателя требует способности LRU выдать показания фазового угла максимальной вибрации с частотой вращения, либо встроенные в сигнал скорости вращения ротора двигателя, либо через отдельный сигнал с частотой вращения. Сигналы вибрации акселерометра двигателя представляют собой функцию вибрации нескольких компонентов двигателя, включая вентилятор 14, компрессор 16, турбину 20, а также многое другое внутри двигателя, и вибрации, индуцируемой в окружении встроенных элементов конструкции летательного аппарата. Поскольку многие из этих компонентов в двигателе работают на разных скоростях вращения, сигнал вибрации двигателя главным образом представляет собой функцию различных скоростей вращения и значений вибрации, связанных с этими скоростями. Каждый акселерометр двигателя испытывает вибрацию от каждой из этих скоростей двигателя, и, таким образом, LRU должно обладать способностью дифференцировать влияние каждого компонента двигателя. Поэтому требуется система диагностики для обеспечения способности генерировать сигналы акселерометров, которые воспроизводят эту комплексность.
Далее представлено описание системы вибродиагностики двигателя (EVTS), показанной на фиг.3. EVTS моделирует входной сигнал акселерометра двигателя в LRU, такой как EMU. EVTS состоит из пяти составляющих для каждого смоделированного акселерометра: генераторов сигналов, схем синхронизации, схем преобразователей заряда, схем микшеров и интерфейсов имитатора двигателя. Генератор сигналов состоит из серии плат Versa Module Eurocard (VME) для создания индивидуальных сигналов, представляющих вибрации, связанные с каждым компонентом двигателя (вентилятор, турбина, компрессор, коробка приводов и т.д.), а также другими источниками вибрации (генераторы, насосы и т.д.). Хотя в настоящем документе описаны платы VME, могут быть использованы и другие типы плат для генерирования сигналов, которые выполняют аналогичную функцию. Схема синхронизации синхронизирует выходной сигнал вибрации платы VME вентилятора с другим сигналом, представляющем скорость вращения вентилятора, которую EMU отслеживает независимо. EMU осуществляет корреляцию скорости вращения вентилятора двигателя и синхронизированного входного сигнала акселерометра для внесения исправлений фазового угла для поддержки балансировки двигателя. Схема микшера комбинирует синхронизированные сигналы вентилятора двигателя с несинхронизированными сигналами (турбина, компрессор, насосы, генераторы и т.д.). Схема преобразователя заряда преобразует сигнал в заряд, который представляет акселерометр. Моделирование позволяет вычислить все скорости двигателя, все напряжения, частоты и операции с фазовым углом, которые передаются на генераторы сигналов. В целом EVTS дает пользователю возможность представить тысячи условий вибродиагностики в EMU без риска повреждения EMU и обеспечивает недорогое средство проверки любых устройств сопряжения с индикаторами панели контроля хода полета самолета, системами технического обслуживания, без дорогостоящей диагностики полета на реальном самолете.
На фиг.3 показан один вариант осуществления, представленный в настоящем документе, системы моделирования акселерометров для диагностики авиадвигателя, содержащей моделируемые акселерометры, например, акселерометр ʺ1ʺ 300, акселерометр ʺ2ʺ 302 и акселерометр ʺNʺ 304. Каждый моделируемый акселерометр содержит множество компонентов, используемых для создания моделируемого сигнала, который передается и обрабатывается блоком управления двигателем (EMU) 390. Множество смоделированных акселерометров 300, 302 и 304 представляют соответствующие фактические акселерометры, расположенные в конкретных местах для диагностики на авиадвигателе 12, и создают выходной сигнал моделируемой вибрации на EMU 390.
Первым компонентом каждого из множества смоделированных акселерометров является имитатор 310 авиадвигателя, который генерирует выходные сигналы 312, 314, 316 и 318 имитатора авиадвигателя. Каждый из этих выходных сигналов на этом этапе представляет фактическую скорость конкретного компонента авиадвигателя, например скорость №1, 312, скорость №2, 314, и скорость №3, 316, или скорость компонента не авиадвигателя/компонента вибрации не вала авиадвигателя, ʺпрочие № N,ʺ 318, который дает вклад во входной сигнал вибрации авиадвигателя 12. Скорость, связанная с компонентами авиадвигателя, может быть скоростью любого участка узлов вентилятора, компрессора или турбины, при этом компонентом вибрации не авиадвигателя/не вала авиадвигателя может быть любой источник вибрации, которая порождается другими источниками помимо авиадвигателя 12, или источниками, скорость которых не зависит от скорости частей внутри авиадвигателя.
Другим компонентом каждого из множества смоделированных акселерометров является имитатор 320 сигналов акселерометров, который принимает множество выходных сигналов имитатора авиадвигателя, например выходные сигналы 312, 314 и 316 на основе скорости и выходной(ные) сигнал(ы) 318 не на основе скорости и генерирует выходные сигналы имитатора сигналов акселерометров. Чтобы генерировать эти выходные сигналы, имитаторы 322, 324, 326 скорости вибрации и 328 принимают каждый из множества выходных сигналов 312, 314 и 316 моделируемой скорости и по меньшей мере один выходной сигнал 318 моделируемой вибрации и генерируют соответствующий выходной сигнал скорости вибрации. Некоторые из этих выходных сигналов (среди 322, 324 и 328) могут быть приняты на рычаги 330, 332 и 334 управления фазовым углом, которые вводят значение фазового угла для генерирования соответствующего выходного сигнала фазового угла. Выходной сигнал фазового угла основан на опорном угле вращения авиадвигателя, поскольку он вращается вокруг центральных валов 22. Каждый из манипуляторов 336, 338, 340 и 342 управления амплитудой принимает соответствующий выходной сигнал фазового угла (и скорость вибрации №3 без какого-либо рычага управления фазовым углом) и обновляет значение амплитуды для генерирования соответствующего выходного сигнала амплитуды.
Еще одним компонентом каждого из множества смоделированных акселерометров является генератор 350 сигнала акселерометра, который принимает множество выходных сигналов имитатора сигналов акселерометров и синхронизирует по меньшей мере один выходной сигнал имитатора сигналов акселерометров с опорным тактовым сигналом от одного из множества выходных сигналов имитатора авиадвигателя, например по скорости №1, 312. Генератор 350 сигналов акселерометра генерирует выходные сигналы генератора акселерометра во-первых, путем использования цифроаналогового преобразователя (ЦАП) 352 для приема и преобразования опорного тактового сигнала от выходного сигнала скорости №1, 312 имитатора 310 двигателя в аналоговый опорный тактовый сигнал. ЦАП №1356, ЦАП №2358, ЦАП №3360 и ЦАП № N 362 преобразуют каждый соответствующий выходной сигнал амплитуды в соответствующий аналоговый выходной сигнал и синхронизированный генератор 354 импульсов принимает аналоговый опорный тактовый сигнал и синхронизирует по меньшей мере один из аналоговых выходных сигналов посредством множества ЦАП преобразователей, например, ЦАП №1356, ЦАП №2358 и ЦАП № N 362, чтобы генерировать соответствующий синхронизированный аналоговый выходной сигнал.
Еще одним компонентом каждого из множества смоделированных акселерометров является секция 372, 374, 376 и 378 фильтра, которая принимает и отфильтровывает шум множества выходных сигналов генератора акселерометра, например выходных сигналов 356, 358 и 362, и каждого несинхронизированного соответствующего аналогового выходного сигнала, например преобразователя 360, чтобы генерировать отфильтрованные выходные сигналы генератора акселерометра.
Каждый смоделированный акселерометр дополнительно содержит микшер 380 импульсов, который принимает и комбинирует каждый из множества отфильтрованных выходных сигналов генератора акселерометра, которые включают выходной сигнал скорости вибрации, выходной сигнал фазового угла, выходной сигнал амплитуды, синхронизированной аналоговый выходной сигнал и несинхронизированный аналоговый выходной сигнал, тем самым, генерируя одиночный отфильтрованный выходной сигнал генератора акселерометра.
Наконец, преобразователь 382 заряда принимает выходной сигнал микшера 380 и преобразует одиночный отфильтрованный выходной сигнал генератора акселерометра в выходной сигнал имитации вибрации текущего заряда. Блок 390 мониторинга двигателя принимает каждый выходной сигнал имитации вибрации текущего заряда от каждого из множества смоделированных акселерометров для измерения смоделированной общей вибрации авиадвигателя.
На фиг.4 показан способ диагностики авиадвигателя посредством смоделированной вибрации, включающий генерирование 400 выходных сигналов имитатора авиадвигателя путем генерирования выходных сигналов смоделированной скорости, каждый из которых является репрезентативным для фактической скорости конкретного компонента авиадвигателя, причем конкретным компонентом является один из следующих: вентилятора, компрессора и турбины - и генерации по меньшей мере одного выходного сигнала смоделированной вибрации от источника вибрации, не являющегося авиадвигателем или валом авиадвигателя.
Способ дополнительно включает генерирование 402 выходных сигналов имитатора сигналов акселерометров на основе множества выходных сигналов имитатора авиадвигателя, путем генерирования выходных сигналов скорости вибрации для каждого из множества выходных сигналов имитатора сигналов акселерометров, генерирование выходного сигнала фазового угла по меньшей мере для одного из множества выходных сигналов имитатора сигналов акселерометров и генерирование выходного сигнала амплитуды для каждого из множества выходных сигналов имитатора сигналов акселерометров.
Способ дополнительно включает синхронизацию 404 по меньшей мере одного из множества выходных сигналов имитатора сигналов акселерометров с опорным тактовым сигналом от одного из множества выходных сигналов имитатора авиадвигателя и генерирование выходных сигналов генератора акселерометров путем преобразования опорного тактового сигнала в аналоговый опорный тактовый сигнал, преобразование каждого выходного сигнала амплитуды в выходной аналоговый сигнал и синхронизацию по меньшей мере одного из аналоговых выходных сигналов для генерирования синхронизированного аналогового выходного сигнала.
Способ дополнительно включает фильтрацию 406 шума множества выходных сигналов генератора акселерометров и генерирование отфильтрованных выходных сигналов генератора акселерометров, путем приема каждого синхронизированного аналогового выходного сигнала и каждого несинхронизированного аналогового выходного сигнала для генерирования соответствующих отфильтрованных выходных сигналов.
Способ дополнительно включает комбинирование каждого из множества отфильтрованных выходных сигналов генератора акселерометров для генерирования одиночного отфильтрованного выходного сигнала 408 генератора акселерометров, путем приема отфильтрованных выходных сигналов, которые включают выходной сигнал скорости вибрации, выходной сигнал фазового угла, выходной сигнал амплитуды, синхронизированный аналоговый выходной сигнал и несинхронизированный аналоговый выходной сигнал, а затем генерирование одиночного отфильтрованного выходного сигнала генератора акселерометров по каждому из этих выходных сигналов. Способ дополнительно включает преобразование 410 одиночного отфильтрованного выходного сигнала генератора акселерометров в выходной сигнал имитации вибрации текущего заряда.
Таким образом, представленные в настоящем документе варианты осуществления дают пользователю возможность представить тысячи условий вибродиагностики для EMU без риска повреждения LRU и обеспечивают недорогое средство проверки любых устройств связи с индикаторами панели хода полета самолета и системами технического обслуживания без дорогостоящей диагностики полета на реальном самолете.
На фиг.5 показана иллюстративная архитектура компьютера для компьютера 500, позволяющего выполнять компоненты программы, описанные в настоящем документе, для выполнения вышеизложенных вариантов осуществления. Архитектура компьютера, показанная на фиг.5, иллюстрирует обычный настольный ПК, ноутбук, служебную ЭВМ, планшетный компьютер, смартфон, электронное считывающее устройство, МР3-плейер или другое цифровое музыкальное устройство, или любой компьютер, предназначенный для использования с системой диагностики двигателя, и может быть использована для реализации компьютера 500 и исполнения любых других компонентов программного обеспечения, описанных в настоящем документе.
Архитектура компьютера, показанная на фиг.5, включает блок 502 центрального процессора (ЦПУ) или процессор, системную память 508, включающую оперативное запоминающее устройство 514 (RAM) и постоянное запоминающее устройство (ROM) 516, и системную шину 504, которая соединяет память с ЦПУ 502. Базовая система ввода/вывода (BIOS), содержащая базовые стандартные процедуры, которые помогают передавать информацию между элементами внутри компьютера 500, например во время запуска, сохранена на ROM 516. Компьютер 500 дополнительно содержит запоминающее устройство 510 большой емкости для хранения операционной системы 518, программ приложений и других программных модулей, которые описаны далее более подробно.
Запоминающее устройство 510 большой емкости присоединено к ЦПУ 502 через контроллер запоминающего устройства большой емкости (не показан), подключенный к шине 504. Запоминающее устройство 510 большой емкости и связанный с ним машиночитаемый носитель обеспечивают энергонезависимое запоминающее устройство для компьютера 500. Хотя содержащееся в настоящем документе описание машиночитаемого носителя относится к запоминающему устройству большой емкости, такому как жесткий диск или дисковод CD-ROM, для специалистов в этой области очевидно, что машиночитаемым носителем может быть любой существующий носитель информации, к которому может иметь доступ компьютер 500.
В качестве примера, а не ограничения машиночитаемый носитель информации может включать энергозависимый и энергонезависимый, съемный и несъемный носитель, выполненный любым способом или по любой технологии для хранения такой информации, как машиночитаемые инструкции, структуры данных, программные модули или другие данные. Например, машиночитаемый носитель информации включает, но не ограничивается этим, RAM, ROM, EPROM, EEPROM, флэш-память или твердотельную память по другой технологии, CD-ROM, универсальные цифровые диски (DVD), HD-DVD, BLU-RAY или другую оптическую память, магнитные кассеты, магнитную ленту, память на магнитном диске или другие устройства магнитной памяти, или любой невременный носитель, который можно использовать для хранения нужной информации и доступ к которому есть у компьютера 500.
Следует понимать, что описанный в настоящем документе машиночитаемый носитель также охватывает коммуникационную среду. Коммуникационная среда обычно содержит машиночитаемые инструкции, структуры данных, программные модули или другие данные в модулированном данными сигнале, таком как несущая сигнала или другой механизм транспортировки, и включает любой носитель для переподачи информации. Термин ʺмодулированный данными сигналʺ означает сигнал, одна или более характеристик которого заданы или изменены таким образом, чтобы закодировать информацию в сигнале. В качестве примера, а не ограничения коммуникационная среда включает проводную среду, такую как проводная сеть или прямое проводное соединение, и беспроводную среду, такую как акустическая, РЧ, инфракрасная и другая беспроводная среда. Комбинации любого из вышеуказанного также должны быть включены в охватываемые машиночитаемые носители. Машиночитаемый запоминающий носитель информации не охватывает коммуникационную среду.
По другим вариантам осуществления компьютер 500 может работать в сетевой среде с использованием логических соединений с удаленными компьютерами через сеть, например сеть 520. Компьютер 500 может подключаться к сети 520 через блок 506 сетевого интерфейса, подключенного к шине 504. Очевидно, что блок 506 сетевого интерфейса также может быть использован для подключения к другим типам сетей и удаленных компьютерных систем. Компьютер 500 также может содержать контроллер 512 ввода/вывода для приема и обработки входного сигнала от множества других устройств, включая интерфейс 100 с сенсорным экраном, клавиатуру, мышь, джойстик или световое перо (не показаны на фиг.5). Аналогично, контроллер ввода/вывода может обеспечивать вывод на экран дисплея, принтер или другой тип устройства вывода (также не показано на фиг.5).
Как кратко упомянуто выше, множество программных модулей и файлов данных могут быть сохранены в запоминающем устройстве 510 большой емкости и ОЗУ 514 компьютера 500, включая операционную систему 518, подходящую для управления работой сетевого настольного ПК, ноутбука, планшетного компьютера, смартфона, электронного считывающего устройства, цифрового музыкального плейера, сервера или бортового компьютера. Запоминающее устройство 510 большой емкости и ОЗУ 514 также позволяют сохранить один или более программных модулей. В частности, запоминающее устройство 510 большой емкости и RAM 514 позволяют сохранить приложение 522 управления устройством, исполняющим выполнение различных описанных выше операций. Запоминающее устройство 510 большой емкости и ОЗУ 514 также позволяют сохранять другие программные модули и данные.
В общем программные приложения или модули, когда они загружены в ЦПУ 502 и исполняются, могут превратить ЦПУ 502 и весь компьютер 500 из компьютерной системы общего назначения в компьютерную систему специального назначения для выполнения представленных в настоящем документе функций. ЦПУ 502 может быть сконструирован из любого числа транзисторов или других дискретных схемных элементах, которые могут по отдельности или вместе принимать любое число состояний. В частности, ЦПУ 502 может функционировать как одна или более конечных автоматов при исполнении инструкций, содержащихся в программе или модулях. Эти исполняемые компьютером инструкции могут преобразовать ЦПУ 502 путем указания того, как ЦПУ 502 должен осуществлять переходы между состояниями, тем самым физически трансформируя транзисторы или другие элементы дискретного аппаратного обеспечения, составляющие ЦПУ 502.
Кодирование программного обеспечения или модулей на запоминающем устройстве большого объема также позволяет трансформировать физическую структуру запоминающего устройства большого объема или соответствующий машиночитаемый носитель информации. Конкретное трансформирование физической структуры может зависеть от различных факторов в разных вариантах осуществления настоящего изобретения. Примеры таких факторов могут включать, без ограничения технологию, используемую для осуществления машиночитаемого носителя информации, независимо от того, характеризуется ли считываемый компьютером носитель информации, как первичная или вторичная память, и тому подобное. Например, если машиночитаемый носитель информации осуществлен в виде памяти на основе полупроводников, программа или модули могут трансформировать физическое состояние полупроводниковой памяти, когда в ней закодирована программа. Например, программа может трансформировать состояния транзисторов, конденсаторов или других дискретных элементов схемы, составляющих полупроводниковую память.
В качестве другого примера машиночитаемый носитель информации может быть осуществлен с использованием магнитной или оптической технологии. В таких вариантах осуществления программа или модули могут трансформировать физическое состояние магнитного или оптического носителя, когда на нем закодирована программа. Эти преобразования могут включать изменение магнитных характеристик конкретных участков заданного магнитного носителя. Эти преобразования также могут включать изменение физических особенностей или характеристик конкретных участков заданного оптического носителя, чтобы изменить оптические характеристики этих участков. Возможны и другие преобразования физического носителя без отступления от объема и сущности настоящего изобретения с примерами, приведенными только для облегчения данного описания.
Кроме того, в соответствии с чертежами и текстом в одном варианте осуществления описывается система диагностики двигателя, при этом система содержит: несколько смоделированных акселерометров 300, 302 и 304, причем каждый смоделированный акселерометр 300, 302, 304 содержит: имитатор двигателя, который генерирует несколько выходных сигналов 312 имитатора двигателя; имитатор 320 сигналов акселерометров, который принимает несколько выходных сигналов 312, 314, 316 имитатора двигателя и генерирует несколько выходных сигналов 320, 324, 328 имитатора 320 сигналов акселерометров; генератор 350 сигналов акселерометров, который принимает несколько выходных сигналов имитатора 320 сигналов акселерометров и синхронизирует по меньшей мере один из нескольких выходных сигналов имитатора 320 сигналов акселерометров с опорным тактовым сигналом от одного из нескольких выходных сигналов 312 имитатора двигателя, причем генератор 350 акселерометра генерирует несколько выходных сигналов 408 генератора акселерометра; секцию фильтров, которая принимает и отфильтровывает шум от нескольких выходных сигналов 408 генератора акселерометра для генерирования нескольких отфильтрованных выходных сигналов 408 генератора акселерометра; микшер 380, который принимает и комбинирует каждый из нескольких отфильтрованных выходных сигналов 408 генератора акселерометра для генерирования одиночного отфильтрованного выходного сигнала 408 генератора акселерометра; и преобразователь 382 заряда, который принимает и преобразует одиночный отфильтрованный выходной сигнал 408 генератора акселерометра в выходной сигнал имитации вибрации текущего заряда; и блок управления, который принимает каждый выходной сигнал имитации вибрации текущего заряда от каждого из нескольких смоделированных акселерометров 300, 302 и 304 для измерения смоделированной общей вибрации двигателя.
В одном варианте система содержит несколько смоделированных акселерометров 300, 302 и 304, представляющих несколько из соответствующих фактических акселерометров, расположенных в конкретных местах диагностики на двигателе, и обеспечивающих выходной сигнал смоделированной вибрации на блок управления, в соответствии с несколькими из соответствующих фактических акселерометров в каждом конкретном месте диагностики при различных скоростях двигателя. В другом варианте предлагается система, в которой имитатор двигателя дополнительно включает: несколько смоделированных выходных сигналов 312, 314 и 316 скорости, каждая из которых является репрезентативной относительно фактической скорости конкретного компонента авиадвигателя 12, причем конкретным компонентом является один из следующих: вентилятор 14, компрессор 16 и турбина 20; и смоделированный выходной сигнал 318 вибрации от одного из источников вибрации: не авиадвигателя 12 и не вала авиадвигателя 12.
В другом варианте предлагается система, в которой имитатор 320 сигналов акселерометров дополнительно включает: несколько имитаторов 322, 324, 326 и 328 скорости вибрации, каждый из которых принимает один из нескольких выходных сигналов 312, 314 и 316 смоделированной скорости и по меньшей мере один выходной сигнал 318 смоделированной вибрации и генерирует соответствующий выходной сигнал скорости вибрации; несколько манипуляторов 330, 332 и 334 управления фазовым углом, которые принимают каждый соответствующий выходной сигнал скорости вибрации и вводят значение фазового угла для генерирования соответствующего выходного сигнала фазового угла; и несколько манипуляторов 336, 338, 340 и 342 управления амплитудой, которые принимают каждый соответствующий выходной сигнал фазового угла и обновляют значение амплитуды для генерирования соответствующего выходного сигнала амплитуды.
В еще одном варианте предлагается система, в которой генератор 350 сигналов акселерометров дополнительно содержит: цифроаналоговый преобразователь ЦАП 352, который принимает и преобразует опорный тактовый сигнал в аналоговый опорный тактовый сигнал; несколько ЦАП преобразователей, которые преобразуют каждый соответствующий выходной сигнал амплитуды в соответствующий аналоговый выходной сигнал; и синхронизированный генератор импульсов, который принимает аналоговый опорный тактовый сигнал и синхронизирует по меньшей мере два аналоговых выходных сигнала посредством нескольких ЦАП преобразователей для генерирования соответствующего синхронизированного аналогового выходного сигнала.
В одном примере система содержит секцию 372, 374, 376 и 378 фильтров, содержащую несколько фильтров, которые принимают каждые соответствующие синхронизированные аналоговые выходные сигналы и каждые несинхронизированные соответствующие аналоговые выходные сигналы для генерирования соответствующих отфильтрованных выходных сигналов. В другом примере система содержит микшер 380, принимающий соответствующие отфильтрованные выходные сигналы, включая выходной сигнал скорости вибрации, выходной сигнал фазового угла, выходной сигнал амплитуды, синхронизированный аналоговый выходной сигнал и несинхронизированный аналоговый выходной сигнал, и генерирующий одиночный отфильтрованный выходной сигнал 408 генератора акселерометра по каждому из этих выходных сигналов.
В одном из вариантов осуществления предлагается смоделированный акселерометр двигателя, содержащий: имитатор двигателя, который генерирует несколько выходных сигналов 312 имитатора двигателя; имитатор 320 сигналов акселерометров, который принимает несколько выходных сигналов 312, 314, 316 имитатора двигателя и генерирует несколько выходных сигналов 322, 324, 328 имитатора 320 сигналов акселерометров; генератор 350 сигналов акселерометров, который принимает несколько выходных сигналов имитатора 320 сигналов акселерометров и синхронизирует по меньшей мере один из нескольких выходных сигналов имитатора 320 сигналов акселерометров с опорным тактовым сигналом от одного из нескольких выходных сигналов 312 имитатора двигателя, причем генератор 350 сигналов акселерометров генерирует несколько выходных сигналов 408 генератора сигналов акселерометров; секцию 372, 374, 376 и 378 фильтров, которая принимает и отфильтровывает шум от нескольких выходных сигналов 408 генератора сигналов акселерометров, чтобы генерировать несколько отфильтрованных выходных сигналов 408 этого генератора; микшер 380, который принимает и комбинирует каждый из нескольких отфильтрованных выходных сигналов 408 генератора сигналов акселерометров для генерирования одиночного отфильтрованного выходного сигнала 408 генератора сигналов акселерометра; и преобразователь 382 заряда, который принимает и преобразует одиночный отфильтрованный выходной сигнал 408 генератора сигналов акселерометров в выходной сигнал имитации вибрации текущего заряда.
В одной из модификаций смоделированный акселерометр двигателя является смоделированным акселерометром двигателя, представляющим фактический акселерометр, расположенный в конкретном месте на двигателе для диагностики, и создает выходной сигнал смоделированной вибрации с выдачей в блок управления, соответствующий фактическому акселерометру в конкретном месте для диагностики при различных скоростях двигателя. В другой модификации предлагается смоделированный акселерометр авиадвигателя 12 по п.8, в котором имитатор двигателя дополнительно содержит: несколько выходных сигналов 312, 314, 316 смоделированной скорости, каждый из которых является репрезентативным для фактической скорости конкретного компонента авиадвигателя 12, причем конкретным компонентом является один из вентиляторов 14, компрессора 16 и турбины 20; и выходной сигнал 318 смоделированной вибрации от одного из источников вибрации, не являющегося ни авиадвигателем 12 и ни валом двигателя.
В одном из примеров предлагается смоделированный акселерометр авиадвигателя 12 по п.10, в котором имитатор 320 сигналов акселерометров дополнительно содержит: несколько имитаторов 322, 324, 326 и 328 скорости вибрации, каждый из которых принимает один из нескольких выходных сигналов 312, 314 и 316 смоделированных скоростей и по меньшей мере один выходной сигнал 318 смоделированной вибрации и генерирует соответствующий выходной сигнал скорости вибрации; несколько манипуляторов 330, 332 и 334 управления фазовым углом, каждый из которых принимает соответствующий выходной сигнал скорости вибрации и вводит значение фазового угла для генерирования соответствующего выходного сигнала фазового угла; и несколько манипуляторов 336, 338, 340 и 342 управления амплитудой, каждый из которых принимает соответствующий выходной сигнал фазового угла и обновляет значение амплитуды, чтобы генерировать соответствующий выходной сигнал амплитуды.
В другом примере предлагается смоделированный акселерометр авиадвигателя 12, в котором генератор 350 сигналов акселерометров дополнительно содержит: цифроаналоговый преобразователь ЦАП 352, который принимает и преобразует опорный тактовый сигнал в аналоговый опорный тактовый сигнал; несколько ЦАП, каждый из которых преобразует соответствующий выходной сигнал амплитуды в соответствующий аналоговый выходной сигнал; и синхронизированный генератор импульсов, который принимает аналоговый опорный тактовый сигнал и синхронизирует по меньшей мере два из аналоговых выходных сигналов посредством нескольких ЦАП для генерирования соответствующего синхронизированного аналогового выходного сигнала. В другом примере смоделированный акселерометр авиадвигателя 12 содержит секции 372, 374, 376 и 378 фильтров, включающие несколько фильтров, каждый из которых принимает соответствующие синхронизированные аналоговые выходные сигналы и соответствующие несинхронизированные аналоговые выходные сигналы, чтобы генерировать соответствующие отфильтрованные выходные сигналы. В другом примере смоделированный акселерометр авиадвигателя 12 содержит микшер 380, принимающий соответствующие отфильтрованные выходные сигналы, включая выходной сигнал скорости вибрации, выходной сигнал фазового угла, выходной сигнал амплитуды, синхронизированный аналоговый выходной сигнал и несинхронизированный аналоговый выходной сигнал, причем способ дополнительно содержит генерирование одиночного отфильтрованного выходного сигнала генератора 350 сигналов акселерометров по каждому из этих выходных сигналов.
В одном из вариантов осуществления предлагается способ моделирующей вибрацию диагностики двигателя, при этом способ включает: генерирование нескольких выходных сигналов 312 имитатора двигателя; генерирование нескольких выходных сигналов имитатора 320 сигналов акселерометров на основе нескольких выходных сигналов 312, 314, 316 имитатора двигателя; синхронизацию 404 по меньшей мере одного из нескольких выходных сигналов имитатора 320 сигналов акселерометров с опорным тактовым сигналом от одного из нескольких выходных сигналов 312, 314, 316 имитатора двигателя и генерирование нескольких выходных сигналов генератора 350 сигналов акселерометров; фильтрацию шума нескольких выходных сигналов генератора 350 сигналов акселерометров и генерирование нескольких отфильтрованных выходных сигналов генератора 350 сигналов акселерометров; комбинирование каждого из нескольких отфильтрованных выходных сигналов генератора 350 акселерометра для генерирования одиночного отфильтрованного выходного сигнала генератора 350 сигналов акселерометров; и преобразование 410 одиночного отфильтрованного выходного сигнала генератора 350 сигналов акселерометров в выходной сигнал имитации вибрации текущего заряда.
В одном примере предлагается способ, в котором генерирование нескольких выходных сигналов 312 имитатора двигателя дополнительно включает: генерирование нескольких выходных сигналов 312, 314 и 316 смоделированных скоростей, каждый из которых является репрезентативным для фактической скорости конкретного компонента авиадвигателя 12, причем конкретным компонентом является один из следующих: вентилятор 14, компрессор 16 и турбина 20; и генерирование по меньшей мере одного выходного сигнала 318 смоделированной вибрации одного из источников вибрации, не являющимся ни авиадвигателем 12, ни валом авиадвигателя 12. В другом примере предлагается способ, в котором генерирование нескольких выходных сигналов имитатора 320 сигналов акселерометров дополнительно включает: генерирование выходных сигналов скоростей вибрации для каждого из нескольких выходных сигналов имитатора 320 сигналов акселерометров; генерирование выходного сигнала фазового угла по меньшей мере для одного из нескольких выходных сигналов имитатора 320 сигналов акселерометров; и генерирование выходного сигнала амплитуды для каждого из нескольких выходных сигналов имитатора 320 сигналов акселерометров.
В другом примере предлагается способ, в котором синхронизация 404 по меньшей мере одного из нескольких выходных сигналов имитатора 320 сигналов акселерометров дополнительно включает: преобразование опорного тактового сигнала в аналоговый опорный тактовый сигнал; преобразование каждого выходного сигнала амплитуды в аналоговый выходной сигнал; и синхронизацию 404 по меньшей мере двух из аналоговых выходных сигналов для генерирования синхронизированного аналогового выходного сигнала. В одном примере предлагается способ, в котором фильтрация шума от нескольких выходных сигналов генератора 350 акселерометра дополнительно включает: прием каждого из синхронизированных аналоговых выходных сигналов и каждого из несинхронизированных аналоговых выходных сигналов для генерирования отфильтрованных выходных сигналов. В другом примере предлагается способ, в котором комбинирование каждого из нескольких отфильтрованных выходных сигналов генератора 350 сигналов акселерометров дополнительно включает: прием отфильтрованных выходных сигналов, включая выходной сигнал скорости вибрации, выходной сигнал фазового угла, выходной сигнал амплитуды, синхронизированный аналоговый выходной сигнал и несинхронизированный аналоговый выходной сигнал; и генерирование одиночного отфильтрованного выходного сигнала генератора 350 сигналов акселерометров по каждому из этих сигналов.
Описанный выше объект изобретения предусмотрен только для иллюстрации и не подразумевает ограничения. Различные модификации и изменения могут быть внесены в описанный в настоящем документе объект изобретения без повторения показанных и описанных примеров вариантов осуществления и областей применения в пределах сущности и объема настоящего изобретения, которое изложено в следующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ МОДЕЛИРОВАНИЯ ДАТЧИКА | 2007 |
|
RU2417428C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ МЕХАНИЗМА | 2007 |
|
RU2423716C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И/ИЛИ ТРАНСМИССИИ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165605C1 |
| СИСТЕМА КОНТРОЛЯ ПРОЧНОСТНЫХ СВОЙСТВ КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2348916C1 |
| ВОЛНОВОЙ ГЕНЕРАТОР ЭНЕРГИИ И СПОСОБ ГЕНЕРИРОВАНИЯ ЭНЕРГИИ | 2013 |
|
RU2633328C2 |
| ГЕНЕРИРОВАНИЕ СЕЙСМИЧЕСКИХ ВИБРАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2448349C2 |
| ИДЕНТИФИКАЦИЯ ТИПА ДЛЯ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ КОРИОЛИСОВА РАСХОДОМЕРА | 2000 |
|
RU2241209C2 |
| СИСТЕМА СБОРА ВИБРАЦИОННОГО СИГНАЛА ПОВОРОТНОГО ДВИГАТЕЛЯ | 2013 |
|
RU2611558C2 |
| СИСТЕМА ДЛЯ МОДУЛИРОВАНИЯ ИНФОРМАЦИОННЫХ СИГНАЛОВ В ЯЧЕИСТОЙ ТЕЛЕФОННОЙ СИСТЕМЕ С КОДОВЫМ РАЗДЕЛЕНИЕМ МНОЖЕСТВЕННОГО ДОСТУПА И СПОСОБ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2125344C1 |
| СИНХРОНИЗИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПРИЕМНИКА СЖАТОГО СИГНАЛА ЗВУКА И ИЗОБРАЖЕНИЯ | 2000 |
|
RU2262211C2 |
В настоящем изобретении в основном предлагается устройство, система и способ моделирования акселерометра авиадвигателя (12), которые позволяют генерировать выходные сигналы имитатора авиадвигателя (12). Имитатор (320) сигналов акселерометров принимает выходные сигналы имитатора авиадвигателя (12) и генерирует выходные сигналы имитатора (320) сигналов акселерометров, и генератор (350) сигналов акселерометров принимает выходные сигналы имитатора (320) сигналов акселерометров и синхронизирует по меньшей мере один из выходных сигналов имитатора (320) сигналов акселерометров с опорным тактовым сигналом от одного из выходных сигналов имитатора авиадвигателя (12). Смоделированный акселерометр (300) дополнительно содержит секцию (372, 374, 376 и 378) фильтров, которая принимает и отфильтровывает шум нескольких выходных сигналов генератора (350) сигналов акселерометров, чтобы сгенерировать несколько отфильтрованных выходных сигналов генератора (350) сигналов акселерометров, микшер (380), который принимает и комбинирует каждый из нескольких отфильтрованных выходных сигналов генератора (350) сигналов акселерометров, чтобы сгенерировать одиночный отфильтрованный выходной сигнал генератора (350) акселерометра и преобразователь (382) заряда, который принимает и преобразует одиночный отфильтрованный выходной сигнал генератора (350) акселерометра в выходной сигнал имитации вибрации текущего заряда. Технический результат заключается в возможности моделирования диагностики нескольких авиадвигателей без их непосредственной работы в ходе диагностики. 3 н. и 17 з.п. ф-лы, 5 ил.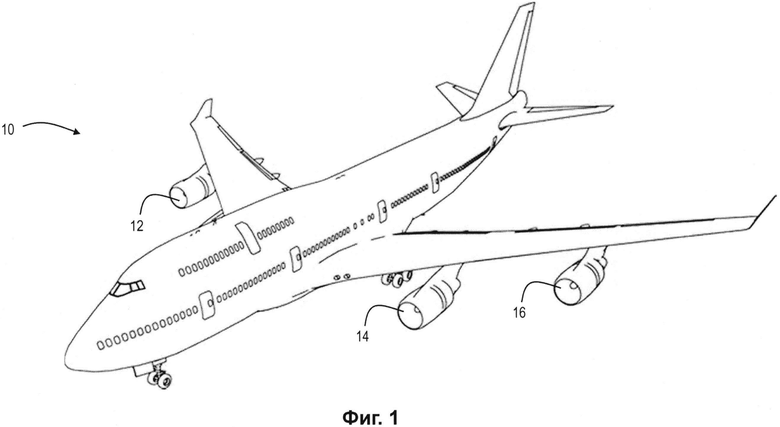
1. Система диагностики смоделированной вибрации двигателя для блока мониторинга двигателя, содержащая:
процессор для выполнения приложения управления устройством, которое хранится в памяти, для генерирования множества компонентов множества смоделированных акселерометров, каждый из которых содержит:
имитатор двигателя, который генерирует посредством процессора множество выходных сигналов имитатора двигателя;
имитатор сигналов акселерометров, который принимает посредством процессора множество выходных сигналов имитатора двигателя и генерирует множество выходных сигналов имитатора сигналов акселерометров;
схему генератора сигналов акселерометров, которая включает в себя цифроаналоговый преобразователь (ЦАП) и которая принимает множество выходных сигналов имитатора сигналов акселерометров и синхронизирует по меньшей мере один из множества выходных сигналов имитатора сигналов акселерометров с опорным тактовым сигналом от одного из множества выходных сигналов имитатора двигателя, при этом генератор сигналов акселерометров генерирует множество выходных сигналов генератора сигналов акселерометров;
секцию фильтров, которая принимает и отфильтровывает шум множества выходных сигналов генератора сигналов акселерометров, чтобы сгенерировать множество отфильтрованных выходных сигналов генератора сигналов акселерометров;
микшер, который принимает и комбинирует каждый из множества отфильтрованных выходных сигналов генератора сигналов акселерометров, чтобы сгенерировать одиночный отфильтрованный выходной сигнал генератора сигналов акселерометров; и
преобразователь заряда, который принимает и преобразует одиночный отфильтрованный выходной сигнал генератора сигналов акселерометров в выходной сигнал имитации вибрации текущего заряда; и
блок управления двигателем, который принимает каждый выходной сигнал имитации вибрации текущего заряда от каждого из множества смоделированных акселерометров, чтобы измерить смоделированную общую вибрацию двигателя.
2. Система по п. 1, в которой множество смоделированных акселерометров представляют множество соответствующих фактических акселерометров, расположенных в конкретных контролируемых местах на двигателе и передают выходной сигнал смоделированной вибрации в блок управления, сопоставленный множеству соответствующих фактических акселерометров в каждом конкретном контролируемом месте при различных скоростях двигателя.
3. Система по п. 1, в которой имитатор двигателя дополнительно содержит:
множество выходных сигналов смоделированных скоростей, каждый из которых является репрезентативным для фактической скорости конкретного компонента авиадвигателя, при этом конкретный компонент является одним из следующих: вентилятор, компрессор и турбина; и
выходной сигнал смоделированной вибрации от одного из источников вибрации, не являющегося ни авиадвигателем, ни валом авиадвигателя.
4. Система по п. 3, в которой имитатор сигналов акселерометров дополнительно содержит:
множество имитаторов скоростей вибрации, каждый из которых принимает один из множества выходных сигналов смоделированных скоростей и по меньшей мере один выходной сигнал смоделированной вибрации и генерирует соответствующий выходной сигнал скорости вибрации;
множество манипуляторов управления фазовым углом, каждый из которых принимает соответствующий выходной сигнал скорости вибрации и вводит значение фазового угла для генерирования соответствующего выходного сигнала фазового угла; и
множество манипуляторов управления амплитудой, каждый из которых принимает соответствующий выходной сигнал фазового угла и обновляет значение амплитуды для генерирования соответствующего выходного сигнала амплитуды.
5. Система по п. 4, в которой схема генератора сигналов акселерометров дополнительно содержит:
указанный ЦАП, который принимает и преобразует опорный тактовый сигнал в аналоговый опорный тактовый сигнал;
множество ЦАП, которые преобразуют каждый соответствующий выходной сигнал амплитуды в соответствующий аналоговый выходной сигнал; и
генератор синхронизированных импульсов, который принимает аналоговый опорный тактовый сигнал и синхронизирует по меньшей мере два из аналоговых выходных сигналов посредством множества ЦАП для генерирования соответствующего синхронизированного аналогового выходного сигнала.
6. Система по п. 5, в которой секция фильтров содержит множество фильтров, каждый из которых принимает один из соответствующих синхронизированных и несинхронизированных аналоговых выходных сигналов для генерирования соответствующих отфильтрованных выходных сигналов.
7. Система по п. 6, в которой микшер принимает соответствующие отфильтрованные выходные сигналы, включая выходной сигнал скорости вибрации, выходной сигнал фазового угла, выходной сигнал амплитуды, синхронизированный аналоговый выходной сигнал и несинхронизированный аналоговый выходной сигнал и
генерирует одиночный отфильтрованный выходной сигнал генератора сигналов акселерометров по каждому из этих выходных сигналов.
8. Смоделированный акселерометр двигателя, содержащий:
имитатор двигателя, который генерирует множество выходных сигналов имитатора двигателя;
имитатор сигналов акселерометров, который принимает множество выходных сигналов имитатора двигателя и генерирует множество выходных сигналов имитатора сигналов акселерометров;
схему генератора сигналов акселерометров, которая принимает множество выходных сигналов имитатора сигналов акселерометров и синхронизирует по меньшей мере один из множества выходных сигналов имитатора сигналов акселерометров с опорным тактовым сигналом от одного из множества выходных сигналов имитатора двигателя, при этом генератор сигналов акселерометров генерирует множество выходных сигналов генератора сигналов акселерометров;
схему фильтров, которая принимает и отфильтровывает шум множества выходных сигналов генератора сигналов акселерометров, чтобы сгенерировать множество отфильтрованных выходных сигналов генератора сигналов акселерометров;
схему микшера, которая принимает и комбинирует каждый из множества отфильтрованных выходных сигналов генератора сигналов акселерометров, чтобы сгенерировать одиночный отфильтрованный выходной сигнал генератора сигналов акселерометров; и
схему преобразователя заряда, которая принимает и преобразует одиночный отфильтрованный выходной сигнал генератора сигналов акселерометров в выходной сигнал имитации вибрации текущего заряда.
9. Смоделированный акселерометр двигателя по п. 8, в котором смоделированный акселерометр представляет соответствующий фактический акселерометр, расположенный в конкретном контролируемом месте на двигателе и передает выходной сигнал смоделированной вибрации в блок управления, сопоставленный фактическому акселерометру в конкретном контролируемом месте при различных скоростях двигателя.
10. Смоделированный акселерометр авиадвигателя по п. 8, в котором имитатор двигателя дополнительно содержит:
множество выходных сигналов смоделированных скоростей, каждый из которых является репрезентативным для фактической скорости конкретного компонента авиадвигателя, при этом конкретный компонент является одним из следующих: вентилятор, компрессор и турбина; и
выходной сигнал смоделированной вибрации от одного из источников вибрации, не являющегося ни авиадвигателем, ни валом авиадвигателя.
11. Смоделированный акселерометр авиадвигателя по п. 10, в котором имитатор сигналов акселерометров дополнительно содержит:
множество имитаторов скоростей вибрации, каждый из которых принимает один из множества выходных сигналов смоделированных скоростей и по меньшей мере один выходной сигнал смоделированной вибрации и генерирует соответствующий выходной сигнал скорости вибрации;
множество манипуляторов управления фазовым углом, каждый из которых принимает соответствующий выходной сигнал скорости вибрации и вводит значение фазового угла для генерирования соответствующего выходного сигнала фазового угла; и
множество манипуляторов управления амплитудой, каждый из которых принимает соответствующий выходной сигнал фазового угла и обновляет значение амплитуды для генерирования соответствующего выходного сигнала амплитуды.
12. Смоделированный акселерометр авиадвигателя по п. 11, в котором генератор сигналов акселерометров дополнительно содержит:
цифроаналоговый преобразователь (ЦАП), который принимает и преобразует опорный тактовый сигнал в аналоговый опорный тактовый сигнал;
множество ЦАП, которые преобразуют каждый соответствующий выходной сигнал амплитуды в соответствующий аналоговый выходной сигнал; и
генератор синхронизированных импульсов, который принимает аналоговый опорный тактовый сигнал и синхронизирует по меньшей мере два из аналоговых выходных сигналов посредством множества ЦАП для генерирования соответствующего синхронизированного аналогового выходного сигнала.
13. Смоделированный акселерометр авиадвигателя по п. 12, в котором схема фильтров содержит множество фильтров, каждый из которых принимает один из соответствующих синхронизированных и несинхронизированных аналоговых выходных сигналов для генерирования соответствующих отфильтрованных выходных сигналов.
14. Смоделированный акселерометр авиадвигателя по п. 13, в котором схема микшера принимает соответствующие отфильтрованные выходные сигналы, включая выходной сигнал скорости вибрации, выходной сигнал фазового угла, выходной сигнал амплитуды, синхронизированный аналоговый выходной сигнал и несинхронизированный аналоговый выходной сигнал,
а акселерометр выполнен с возможностью генерировать одиночный отфильтрованный выходной сигнал генератора сигналов акселерометров по каждому из этих выходных сигналов.
15. Способ смоделированной вибродиагностики двигателя, содержащий:
генерирование множества выходных сигналов имитатора двигателя;
генерирование множества выходных сигналов имитатора сигналов акселерометров на основе множества выходных сигналов имитатора двигателя;
синхронизацию по меньшей мере одного из множества выходных сигналов имитатора сигналов акселерометров с опорным тактовым сигналом, а именно одного из множества выходных сигналов имитатора двигателя, и генерирование множества выходных сигналов генератора сигналов акселерометров;
фильтрацию шума от множества выходных сигналов генератора сигналов акселерометров и генерирование множества отфильтрованных выходных сигналов генератора сигналов акселерометров;
комбинирование каждого из множества отфильтрованных выходных сигналов генератора сигналов акселерометров для генерирования одиночного отфильтрованного выходного сигнала генератора сигналов акселерометров; и
преобразование одиночного отфильтрованного выходного сигнала генератора сигналов акселерометров в выходной сигнал имитации вибрации текущего заряда.
16. Способ по п. 15, в котором генерирование множества выходных сигналов имитатора двигателя дополнительно включает:
генерирование множества выходных сигналов моделируемой скорости, каждый из которых является репрезентативным для фактической скорости конкретного компонента авиадвигателя, конкретным компонентом является одно из вентилятора, компрессора и турбины; и
генерирование по меньшей мере одного выходного сигнала имитации вибрации от одного из источников вибрации, не являющегося ни авиадвигателем, ни валом авиадвигателя.
17. Способ по п. 16, в котором генерирование множества выходных сигналов имитатора сигналов акселерометров дополнительно включает:
генерирование выходных сигналов скоростей вибрации для каждого из множества выходных сигналов имитатора сигналов акселерометров;
генерирование выходного сигнала фазового угла по меньшей мере для одного из множества выходных сигналов имитатора сигналов акселерометров; и
генерирование выходного сигнала амплитуды для каждого из множества выходных сигналов имитатора сигналов акселерометров.
18. Способ по п. 17, в котором синхронизация по меньшей мере одного из множества выходных сигналов имитатора сигналов акселерометров дополнительно включает:
преобразование опорного тактового сигнала в аналоговый опорный тактовый сигнал;
преобразование каждого выходного сигнала амплитуды в аналоговый выходной сигнал; и
синхронизацию по меньшей мере двух аналоговых выходных сигналов для генерирования синхронизированного аналогового выходного сигнала.
19. Способ по п. 18, в котором фильтрация шума множества сигналов генератора сигналов акселерометров дополнительно включает:
прием каждого из синхронизированных аналоговых выходных сигналов и каждого из несинхронизированных аналоговых выходных сигналов для генерирования отфильтрованных выходных сигналов.
20. Способ по п. 19, в котором комбинирование каждого из множества отфильтрованных выходных сигналов генератора сигналов акселерометров дополнительно включает:
прием отфильтрованных выходных сигналов, включая выходной сигнал скорости вибрации, выходной сигнал фазового угла, выходной сигнал амплитуды, синхронизированный аналоговый выходной сигнал и несинхронизированный аналоговый выходной сигнал; и
генерирование одиночного отфильтрованного выходного сигнала генератора сигналов акселерометров по каждому из этих выходных сигналов.
| US 5210704 A 11.05.1993 | |||
| US 5586065 A 17.12.1996 | |||
| US 5675505 A 07.10.1997 | |||
| US 6098022 A 01.08.2000 | |||
| US 9217662 B2 22.12.2015 | |||
| СПОСОБ И СИСТЕМА КОНТРОЛЯ ВИБРАЦИОННЫХ ЯВЛЕНИЙ, ПОЯВЛЯЮЩИХСЯ В ГАЗОТУРБИННОМ ДВИГАТЕЛЕ ЛЕТАТЕЛЬНОГО АППАРАТА ВО ВРЕМЯ РАБОТЫ | 2010 |
|
RU2512610C2 |

