Настоящая международная заявка имеет своей основой и подтверждает приоритет заявки США с серийным номером 11/461170, поданной 31 июля 2006 г. и озаглавленной “Устройство для предотвращения перегрузки двигателя постоянного тока с возбуждением от постоянных магнитов”, полное содержание которой включено здесь путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу, системе и устройству для предотвращения состояний перегрузки в двигателях, более конкретно, в двигателях постоянного тока с возбуждением от постоянных магнитов, например, как используемые в возвратно-поступательных или поворотных приводах.
УРОВЕНЬ ТЕХНИКИ
Традиционно в двигателях каким-либо образом отслеживается ток для предотвращения перегрузок. Это может выполняться с помощью переключателя с термовозбуждением, обычно именуемого устройством тепловой защиты. Для этого аппарата требуется, чтобы состояние перегрузки присутствовало в течение некоторого периода времени для нагревания термоэлемента, от нескольких секунд до нескольких минут в зависимости от степени перегрузки. Перед возобновлением работы ему требуется период времени для того, чтобы остыть после устранения неисправности. Во втором способе используется резистивный элемент, последовательно соединенный с двигателем. Напряжение на этом резисторе пропорционально току, и электрическая цепь может быть спроектирована для прекращения подачи питания на двигатель, когда протекание тока превышает заданную величину. Недостаток этого способа состоит в том, что мощность рассеивается на этом резистивном элементе, что снижает общую эффективность системы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно одному варианту осуществления, способ, устройство или компьютерная программа реализует подход предотвращения перегрузки, предполагающий мониторинг скорости двигателя; обнаружение состояния перегрузки двигателя на основе отслеживаемой скорости и управление работой двигателя согласно обнаруженному состоянию перегрузки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 иллюстрирует примерный аппарат предотвращения перегрузки согласно варианту осуществления.
Фиг.2 иллюстрирует примерный аппарат предотвращения перегрузки согласно дополнительному варианту осуществления.
Фиг.3 иллюстрирует принципиальную схему примерной топологии схемы аппарата предотвращения перегрузки фиг.2 согласно варианту осуществления.
Фиг.4 иллюстрирует блок-схему последовательности операций примерного процесса, которым предотвращается перегрузка двигателя, согласно варианту осуществления.
Фиг.5 иллюстрирует блок-схему последовательности операций примерного процесса, которым предотвращается перегрузка двигателя, согласно варианту осуществления.
Фиг.6 иллюстрирует блок-схему последовательности операций примерного процесса, которым предотвращается перегрузка двигателя, согласно варианту осуществления, и
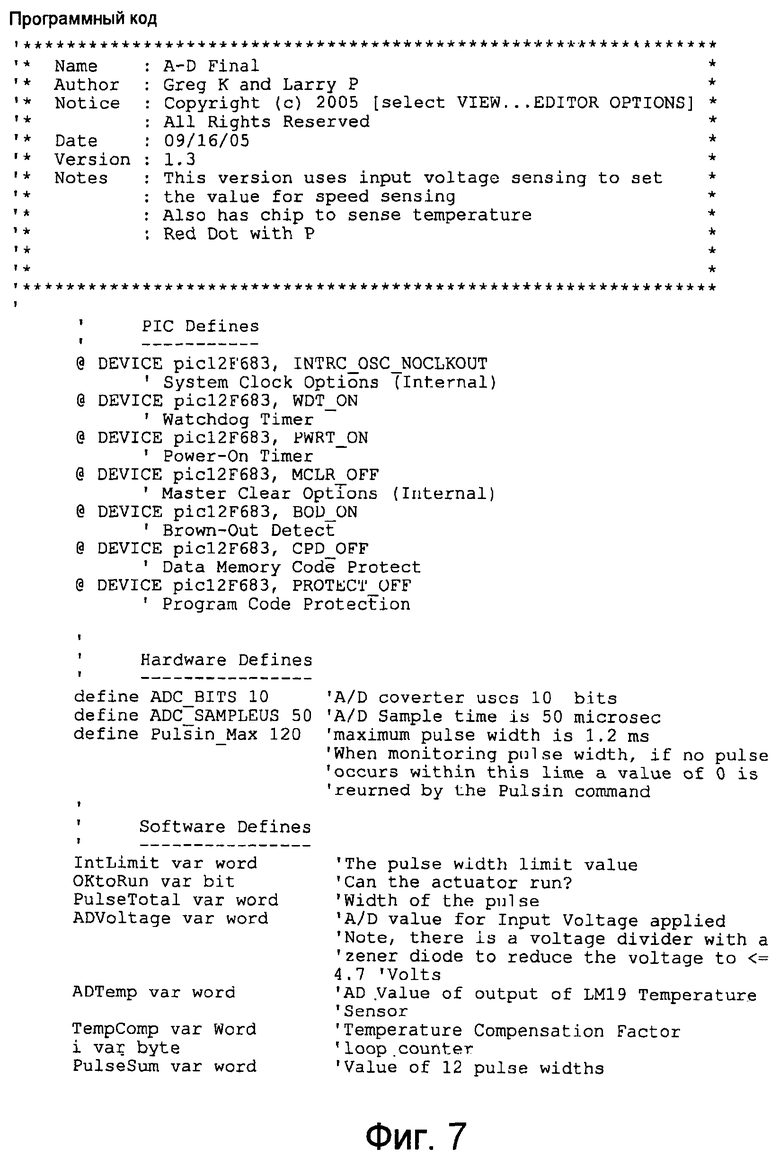
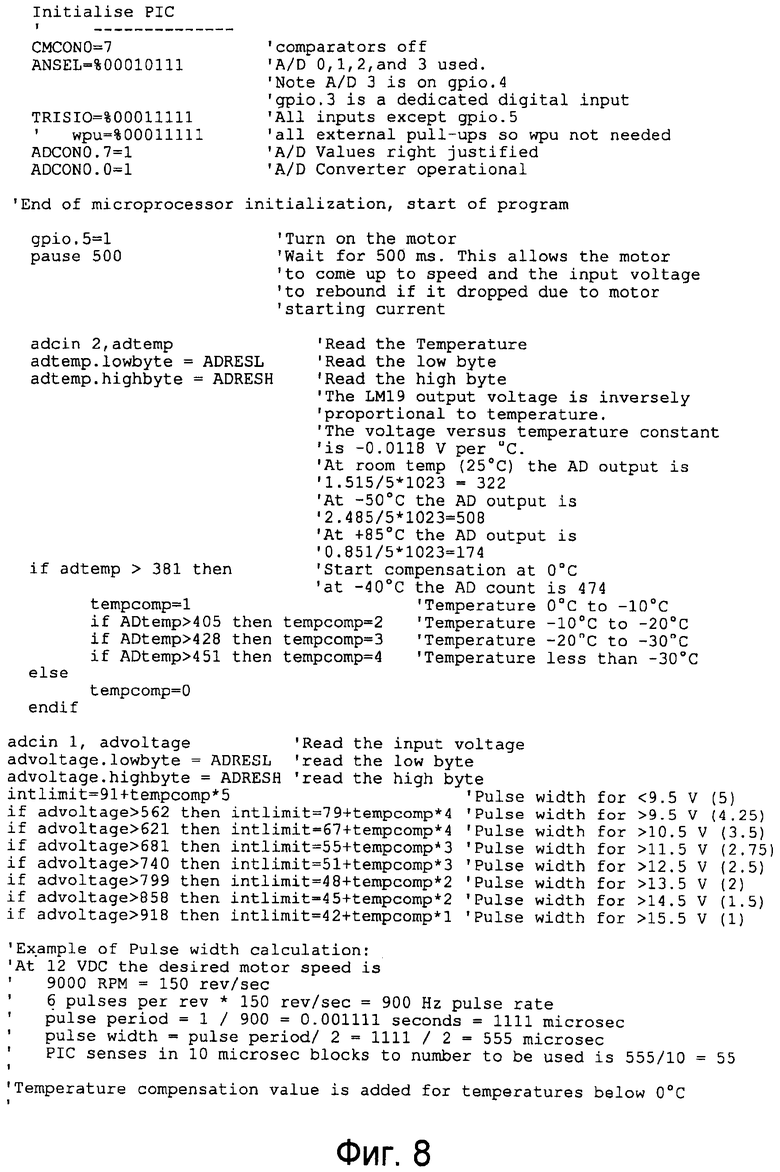
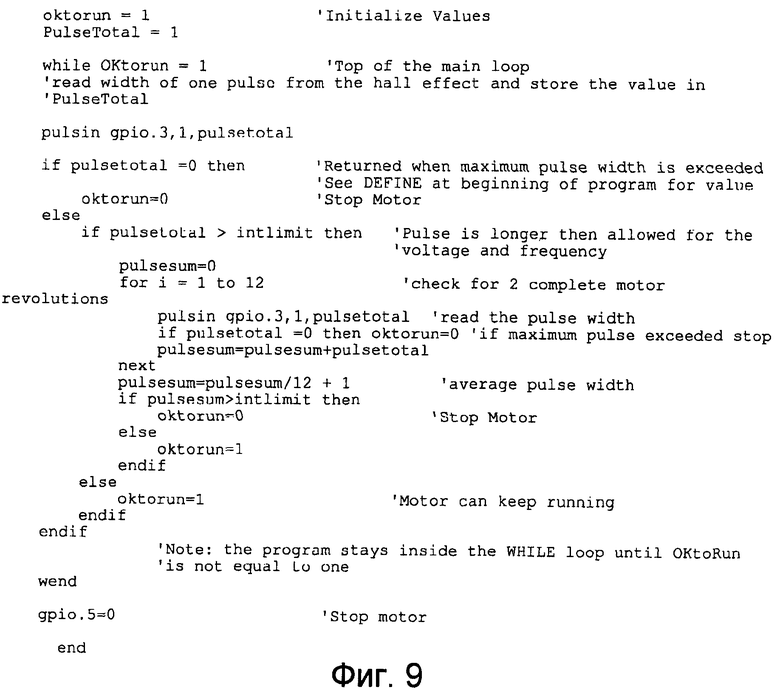
Фиг.7-9 иллюстрирует исходную программу для примерного способа и процесса для предотвращения состояния перегрузки в работе двигателя.
ПОДРОБНОЕ ОПИСАНИЕ РАЗЛИЧНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Согласно различным аспектам, созданы устройство, система, способ, компьютерный продукт, компьютерная программа или нечто подобное для предотвращения состояния перегрузки двигателя, например, двигателя постоянного тока с возбуждением от постоянных магнитов, например, как используемый в возвратно-поступательных или поворотных приводах. Основные параметры двигателей постоянного тока с возбуждением от постоянных магнитов линейно зависимы, т.е. повышение нагружающего момента приводит к пропорциональному снижению скорости двигателя и пропорциональному повышению входного тока двигателя. Любая из трех характеристик может быть измерена для прогнозирования состояния двух других. Поскольку скорость двигателя в двигателе постоянного тока с возбуждением от постоянных магнитов обратно пропорциональна току двигателя, скорость является точным прогнозирующим параметром тока. Скорость двигателя (например, RPM двигателя или подобное), следовательно, может использоваться в качестве индикатора нагрузки вместо тока. Соответственно, состояние перегрузки двигателя может быть обнаружено, и могут быть приняты меры по его предотвращению на основе скорости двигателя и ее мониторинга.
Согласно примерному осуществлению, подход предотвращения перегрузки может предполагать мониторинг скорости двигателя, обнаружение состояния перегрузки двигателя на основе мониторинга скорости и управление работой двигателя согласно обнаруженному состоянию перегрузки. Например, при пороге скорости или ниже (например, заданная скорость или нечто подобное) подача питания на двигатель прекращается. Порог(и) может быть заранее задан (или заранее установлен) или настроен, изменен или определен динамически на основе текущих условий работы (или окружающей среды) двигателя, например, окружающей температуры, входного напряжения, тока и т.д. Таким образом, порог может быть, например, функцией эксплуатационных характеристик или окружающей среды (например, пороговая величина = минимальная скорость (входное напряжение, температура)). Порог(и) может уточняться во время или перед включением двигателя или во время работы двигателя, по желанию, и может вычисляться или выбираться из таблицы или определяться комбинацией этих способов. Ниже подробно описаны различные примеры осуществления предотвращения перегрузки.
Использование скорости в предотвращении перегрузки может обеспечивать, среди прочего, различные примеры эффектов и/или преимуществ. Например, скорость двигателя может отслеживаться с помощью средства, которое не вызывает снижения эффективности по сравнению с традиционными способами. Примеры бесконтактных конфигураций могут включать в себя использование электромагнитного датчика(ов), например, устройства на эффекте Холла, в комбинации с многополюсным магнитом на валу двигателя, использование оптического датчика(ов) и световых технологий и т.д. Это, например, может устранить снижение эффективности, как упоминалось выше. Работа двигателя и его скорость могут вернуться к нормальным, как только неисправность или состояние будет устранена или исправлено, так что задержка сброса, например, связанная с устройством тепловой защиты, не возникает или сокращается. Скорость двигателя также может постоянно отслеживаться, так что время на отклик на состояние неисправности может быть сильно сокращено.
Более того, путем примера, конфигурации или вариантов осуществления предотвращения перегрузки, описанных здесь, могут быть использованы для предотвращения, среди прочего, следующих состояний: (1) механической перегрузки (например, заклинивание или перегрузки в середине хода), (2) электрической перегрузки (например, превышения номинальной продолжительности включения), (3) остановки в конце хода (например, внутренней в приводе или наружной в приводимом в действие аппарате) и т.д.
Фиг.1 показывает обзор блок-схемы последовательности операций примерного аппарата или системы 100 предотвращения перегрузки (здесь и далее “аппарат”) для двигателя 110 согласно варианту осуществления. Как показано, аппарат 100 предотвращения перегрузки включает в себя датчик 120 для мониторинга скорости двигателя 110; детектор 130 для обнаружения состояния перегрузки двигателя 110 на основе отслеживаемой скорости; контроллер 140 для управления работой двигателя 110 и реле 150 (например, переключатель(и), управляющие схемы и др.), через которое могут управляться операции двигателя (например, приостанавливаться, возобновляться, включаться или выключаться, тормозиться и др.).
Датчик 120 скорости может относиться к типу, который не требует физического контакта или не использует его в качестве части операций распознавания или мониторинга скорости двигателя. Например, датчик 120 скорости может быть тахометром или в нем может использоваться электромагнитная конфигурация распознавания, оптическая конфигурация распознавания и т.д. для мониторинга скорости двигателя 110. Одним примером электромагнитной конфигурации распознавания может служить аппарат на эффекте Холла, размещенный или расположенный для распознавания многополюсного магнита, расположенного, например, на валу двигателя 110. В этом примере, подробно описываемом ниже, когда двигатель работает и вал двигателя и магнит на нем вращаются, аппарат на эффекте Холла (или его переключатель(и)) выдает импульсы, в которых ширина импульсов отражает скорость двигателя. Вместо ширины импульсов могут быть использованы другие формы измерения скорости, например, частота. Частота может определяться по ширине импульса за период времени для отражения скорости двигателя. Это только один пример конфигурации распознавания скорости или датчика, и для реализации свойства предотвращения перегрузки могут быть использованы другие конфигурации или датчики, как описано здесь.
Другой тип конфигурации распознавания скорости может предполагать использование оптических датчиков и света. Например, датчик 120 скорости может включать в себя фотоприемник или оптический кодер или нечто подобное для распознавания света, соответствующего скорости двигателя, и выдавать сигнал или информацию, отражающую скорость. Фотоприемник может распознавать (1) свет, отражаемый от компонента на двигателе во время работы, или (2) свет, проецируемый через пазы или отверстия, расположенные относительно двигателя во время работы. В первом примере может быть использован отражательный кодер или нечто подобное, в котором светодиод или другой источник света направляется на двигатель или компонент на нем (например, аналогичным образом на вал) и отражается обратно на фотоприемник, например фотодиод(ы) или фототранзистор(ы) для получения скоростной характеристики двигателя. В другом примере светодиод или другой источник света направляется на пазы или отверстия (расположенные, например, на двигателе или компоненте на нем или относительно них) и обнаруживается фотодетектором, например фотодиодом(ами) или фототранзистором(ами) для получения скоростной характеристики двигателя.
В качестве дополнительного примера, датчик 120 скорости может предполагать использование магнитоуправляемого контакта(ов) в комбинации с магнитом(ами) для распознавания скорости двигателя во время его работы. Пример магнитоуправляемого контакта может использоваться в конфигурациях двигателя с более низкой скоростью. Нижеследующие конфигурации являются просто примерами различных конфигураций распознавания скорости и других конфигураций распознавания скорости, которые могут быть использованы для предотвращения перегрузки, описанной выше.
Различные компоненты и процессы аппарата 100 предотвращения перегрузки, как описано выше, могут дополнительно реализовываться через один или более процессоров, выполняющих машиночитаемый код (например, программу, программное обеспечение или микропрограммное обеспечение и др.), проводную систему или интегральные или логические схемы или их комбинацию. Машиночитаемый код может храниться в материальной среде памяти и считываться и выполняться для реализации свойства предотвращения перегрузки, описываемого здесь.
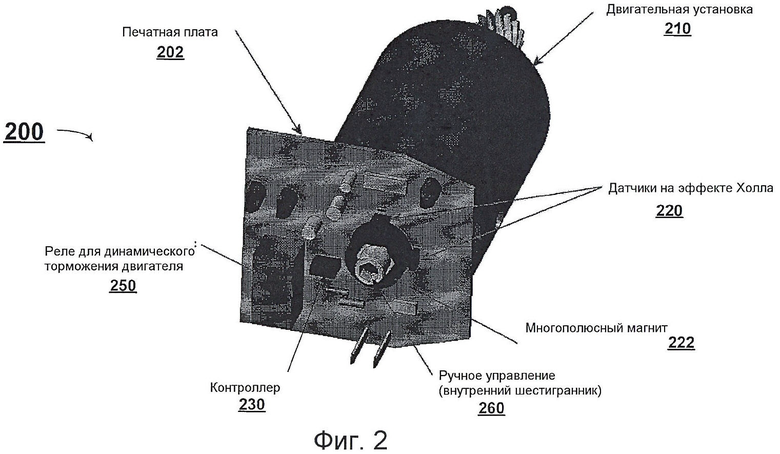
Фиг.2 показывает обзор блок-схемы последовательности операций примерного аппарата 200 предотвращения перегрузки для двигателя (или двигательной установки) 210 согласно дополнительному варианту осуществления. Как показано, аппарат 110 предотвращения перегрузки может включать в себя датчики 220 Холла (например, переключатели на эффекте Холла), контроллер 230 для реализации различных функций и свойств предотвращения перегрузки, например, как описываемые здесь, и реле 250 для динамического торможения двигателя 210. В этом примере эти компоненты аппарата 200 расположены на печатной плате 202.
Датчики 220 Холла расположены для считывания магнитного поля с многополюсного магнита 222, расположенного или подсоединенного на валу двигателя 210 для вращения со скоростью двигателя. Магнит 222 может быть 12-полюсным или 6-полюсным парным магнитным устройством, которое прикреплено к валу двигателя 210. Во время работы магнит 222 возбуждает переключатель(и) на эффекте Холла каждый раз, когда южный полюс проходит поверхность переключателя(ей) на эффекте Холла датчиков 220. Результирующая ширина импульса, выдаваемая датчиками 220, отражает скорость (например, обороты/мин) двигателя 210.
Контроллер 230 может включать в себя микропроцессор(ы) или микроконтроллер(ы), который получает отслеживаемую скорость, обнаруживает состояние перегрузки двигателя на основе отслеживаемой скорости и управляет работой двигателя согласно обнаруженному состоянию перегрузки. Например, при пороге скорости или перед ним (например, заданная величина скорости или нечто подобное) подача питания на двигатель прекращается, например, через реле 250 или другие реле или управляющие схемы или компоненты двигателя.
Также на фиг.2 показана функция или конфигурация 260 ручного управления, которая может использоваться для вращения, эксплуатации или перемещения вручную вала или соединенных с ним компонентов, например, в случае перегрузки или неисправности или выхода из строя или отказа питания и т.д.
Хотя фиг.2 описывает один пример, в котором используются конкретные компоненты и конфигурация этих компонентов, для мониторинга состояния перегрузки согласно скорости двигателя могут использоваться эти и/или другие компоненты и устройства. Например, как отмечалось выше, может быть использован датчик, отличный от переключателей на эффекте Холла, например, оптические датчики и т.д. Тип датчика может быть выбран, например, на основе применения двигателя и условий эксплуатации двигателя.
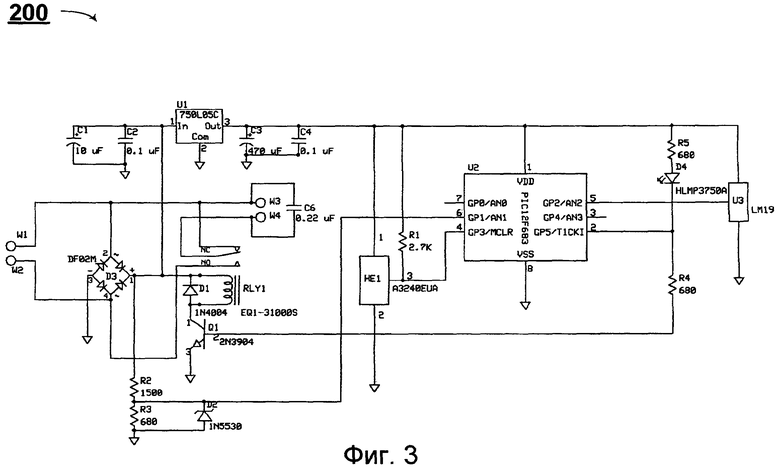
Фиг.3 показывает принципиальную схему примера топологии схемы аппарата 200 предотвращения перегрузки фиг.2 согласно варианту осуществления. Как показано, аппарат 200 предотвращения перегрузки включает в себя выводы W1-W4, конденсаторы С1-С4 и С5, резисторы R1-R5, диоды D1, D2, D4, двухполупериодный выпрямительный мост (или выпрямитель) D3, реле RLY1, регулятор напряжения U1, микропроцессор U2, датчик температуры U3, транзистор Q1 и аппарат или переключатель на эффекте Холла НЕ1.
Выводы W1 и W2 обеспечивают подвод питания. Вывод W1- положительный для одного направления вращения двигателя и отрицательный для обратного направления. Это напряжение прикладывается ко входу двухполупериодного выпрямительного моста D3, а также к контактам однополюсного двухпозиционного реле RLY1. Двухполупериодный выпрямительный мост D3 подает напряжение соответствующей полярности на схему управления аппарата 200 вне зависимости от входной полярности.
Резисторы R2 и R3 образуют делитель напряжения. Величины резисторов могут выбираться для обеспечения желаемого напряжения, например, напряжения 5 В или ниже, на резисторе R3. Стабилитрон D2 используется для обеспечения того, чтобы напряжение не превышало входное напряжение на микропроцессор U2. Напряжение на резисторе R3 пропорционально входному напряжению, прикладываемому к приводу, и используется для отслеживания входного напряжения. Как более подробно описано ниже, входное напряжение может получаться или считываться для изменения или настройки или определения величины порога скорости (или предела), используемой для обнаружения состояния перегрузки.
Конденсаторы С1 и С2 используются для стабилизации подачи напряжения на вход регулятора напряжения U1.
Диод D1 предотвращает превышение напряжения, вызываемое индуктивностью катушки реле RLY1, когда она выключается. Транзистор Q1 используется для включения и выключения катушки реле RLY1 согласно сигналам, применяемым к базе транзистора через резистор R4.
Выход регулятора напряжения U1 фильтруется конденсаторами С3 и С4. Это обеспечивает стабильную подачу напряжения на микропроцессор U2 и переключатель на эффекте Холла НЕ1. Переключатель на эффекте Холла НЕ1 обеспечивает выходной импульс каждый раз, когда его проходит полюс магнита. Ширина импульса пропорциональна скорости вращения двигателя.
Резистор R5 ограничивает протекание тока на светодиод (LED) D4. Диод D4 загорается, когда схема управления микропроцессора выключает двигатель, например, в случае состояния перегрузки.
Датчик температуры U3 используется для мониторинга окружающей температуры (например, величины окружающей температуры). Поскольку привод может работать при широко изменяющихся температурных условиях, реализация предотвращения перегрузки может учитывать окружающую температуру. Как более подробно описано ниже, окружающая температура может получаться или считываться для изменения или настройки величины порога скорости (или предела), используемой для обнаружения состояния перегрузки.
Ниже описаны примеры функций и свойств, управляемых микропроцессором U2, со ссылкой на листинг исходного текста программы фиг.7-9, который описывает пример процесса(ов) или программы, реализуемой через один или более процессоров для обеспечения предотвращения перегрузки.
Например, когда питание в первый раз подается на микропроцессор U2, выход GP5 становится HIGH (высокий). Это включает транзистор Q1, который возбуждает катушку реле RLY1. Контакты реле RLY1 замыкаются, тем самым подавая питание на двигатель привода, например, на выводах W3 и W4 (соединяемых с двигателем), к которым подсоединен конденсатор С6 для подавления помех. Это поддерживается в течение заданного времени, например, 0,5 секунд. Это заданное время может быть выбрано так, что, например, двигатель может достичь скорости, и входное напряжение может подскочить, если оно упало из-за стартового тока двигателя.
В этот момент входное напряжение считывается аналого-цифровым (A/D) преобразователем в микропроцессоре U2. Величина выхода аналого-цифрового (A/D) преобразователя преобразуется математически в минимальную допустимую ширину импульса.
Измеряется ширина каждого выходного импульса аппарата на эффекте Холла. Если изменение в импульсе отсутствует, может быть принято, что двигатель не вращается и питание двигателя выключено. Ширина импульса сравнивается с порогом скорости, который может быть установлен базовой величиной RPM (об/мин), и, если желательно, также корректируется или вводится поправка на входное напряжение и окружающую температуру. Если ширина импульса меньше пороговой величины (например, скорость двигателя больше или равна пороговой скорости), тогда работа двигателя продолжается. Если ширина импульса больше пороговой величины (например, скорость двигателя меньше пороговой скорости), микропроцессор U2 усредняет ширину следующих двенадцати импульсов. Если средняя ширина импульса больше пороговой величины (например, средняя скорость двигателя меньше пороговой скорости), двигатель выключается. Работа двигателя продолжается, пока подача питания не будет прекращена или скорость двигателя не упадет ниже минимальной величины. Двигатель может быть выключен выключением транзистора Q1 для подачи команды реле RLY1 разомкнуть контакты, тем самым прекращая подачу питания на двигатель.
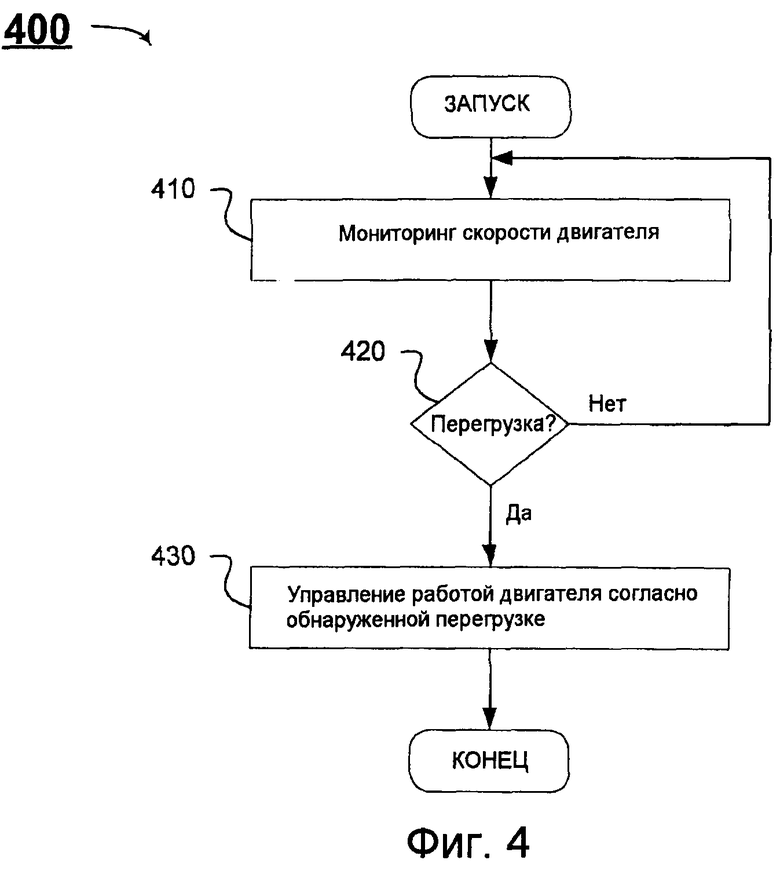
Фиг.4 показывает блок-схему операций примерного процесса 400, которым предотвращается перегрузка двигателя согласно варианту осуществления. Этот процесс может быть реализован аппаратом предотвращения перегрузки, например, аппаратом 100 или 200 или его компонентами.
Процесс 400 отслеживает скорость двигателя на этапе 410. На этапе 420 устройство предотвращения перегрузки обнаруживает, присутствует ли состояние перегрузки (или не присутствует) на основе отслеживаемой скорости. Это может предполагать, например, сравнение отслеживаемой скорости или среднего значения отслеживаемой скорости (за период времени или несколько измерений) с порогом (или пределом). Например, если отслеживаемая скорость меньше, чем порог скорости, тогда присутствует состояние перегрузки. Величина порога и способ сравнения (например, меньше, равно и/или больше) могут также зависеть от того, используется ли ширина импульса, частота или другая характеристика для мониторинга и сравнения скорости. Дополнительно к этому, порог может быть изменен, настроен или определен на основе эксплуатационной среды двигателя, например, окружающей температуры, входного напряжения, тока или других характеристик двигателя или факторов окружающей среды, которые могут влиять на работу двигателя, или их комбинации.
Если состояние перегрузки обнаружено, аппарат предотвращения перегрузки соответственно управляет работой двигателя, например, выключает, выключает подачу питания, приостанавливает и т.д. двигатель. Как только состояние перегрузки исправляется или устраняется, двигатель может быть включен или подано питание на двигатель, или работа двигателя может быть возобновлена вместе со свойством предотвращения перегрузки. В противном случае, процесс 400 переходит к этапу 410 для продолжения мониторинга скорости.
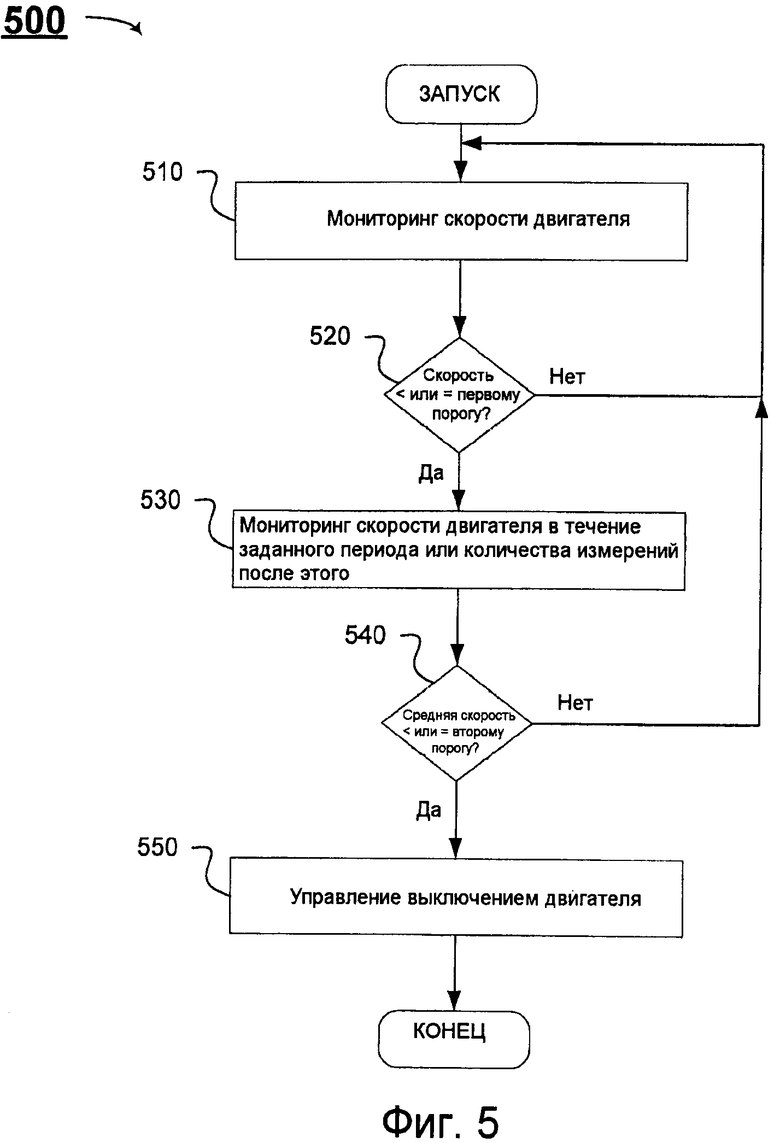
Фиг.5 показывает блок-схему последовательности операций примера процесса 500, которым предотвращается перегрузка двигателя согласно варианту осуществления. Этот процесс может быть реализован аппаратом предотвращения перегрузки, например, аппаратом 100 или 200 или его компонентами.
Процесс 500 отслеживает скорость двигателя на этапе 510. После этого аппарат предотвращения перегрузки обнаруживает, присутствует ли состояние перегрузки (или не присутствует) на основе отслеживаемой скорости. Например, на этапе 520 аппарат предотвращения перегрузки сравнивает отслеживаемую скорость с первым порогом скорости. Если отслеживаемая скорость не меньше или равна первому порогу скорости, тогда процесс 500 переходит обратно к этапу 510. В противном случае, если отслеживаемая скорость меньше или равна первому порогу скорости, тогда аппарат предотвращения перегрузки отслеживает скорость двигателя в течение заданного периода или заданного количества измерений наэтапе 530. Аппарат предотвращения перегрузки сохраняет отслеживаемую скорость (включая или не включая начальное измерение скорости на этапе 510) и вычисляет среднюю скорость за период времени или количество измерений. На этапе 540 аппарат предотвращения перегрузки определяет, меньше ли средняя скорость или равна второму порогу скорости. Первый и второй пороги скорости могут быть одинаковыми или различными. Если средняя скорость не меньше или равна второму порогу скорости, тогда процесс 500 переходит к этапу 510.
В противном случае, если средняя скорость меньше или равна второму порогу скорости, тогда аппарат предотвращения перегрузки обнаруживает состояние перегрузки и управляет выключением двигателя соответственно на этапе 550. Как только состояние перегрузки исправляется или устраняется, двигатель может быть включен или подано питание на двигатель, или работа двигателя может быть возобновлена вместе со свойством предотвращения перегрузки.
Величина первого и второго порогов и способ сравнения (например, меньше, равно и/или больше) могут зависеть от того, используется ли ширина импульса, частота или другая характеристика для мониторинга и сравнения скорости. Дополнительно к этому, пороги могут быть изменены, настроены или определены на основе эксплуатационной среды двигателя, например окружающей температуры, входного напряжения, тока или других характеристик двигателя или факторов окружающей среды, которые могут влиять на работу двигателя, или их комбинации.
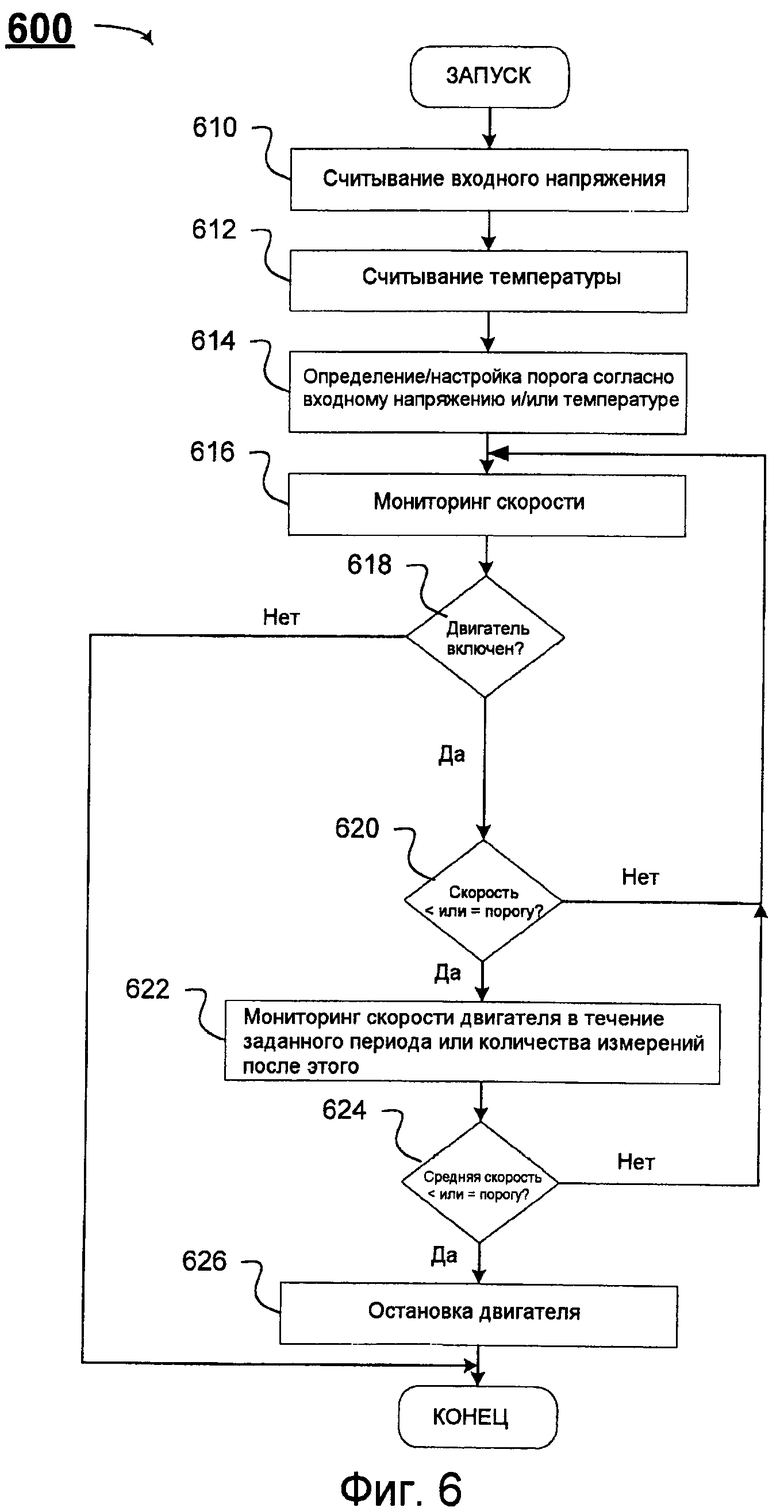
Фиг.6 показывает блок-схему последовательности операций примера процесса 600, которым предотвращается перегрузка двигателя согласно варианту осуществления. Этот процесс может быть реализован аппаратом предотвращения перегрузки, например, аппаратом 100 или 200 или его компонентами.
Процесс 600 считывает входное напряжение на этапе 610 и считывает температуру на этапе 612. На этапе 614 порог(и) скорости определяется или настраивается согласно условиям эксплуатации, например, входному напряжению и/или температуре. Порог(и) скорости может быть вычислен или получен из справочной таблицы или чего-либо подобного или определен комбинацией этих способов.
На этапе 616 отслеживается скорость двигателя. На этапе 618 аппарат предотвращения перегрузки определяет, включен ли двигатель или работает на основе скорости. Например, когда для измерения скорости двигателя используется выход ширины импульса датчика на эффекте Холла, аппарат предотвращения перегрузки может определить, что двигатель выключен или не работает, если нет изменения (например, нет импульса). Если двигатель выключен, тогда процесс 600 прекращается. В противном случае, если двигатель включен, аппарат предотвращения перегрузки сравнивает отслеживаемую скорость с порогом скорости на этапе 620. Если отслеживаемая скорость не меньше или равна порогу скорости, тогда процесс 600 переходит обратно к этапу 616. В противном случае, если отслеживаемая скорость меньше или равна порогу скорости, тогда аппарат предотвращения перегрузки отслеживает скорость двигателя в течение заданного периода или заданного количества измерений на этапе 622. Устройство предотвращения перегрузки сохраняет отслеживаемую скорость (включая или не включая начальное измерение скорости на этапе 616) и вычисляет среднюю скорость за период времени или количество измерений. На этапе 624 аппарат предотвращения перегрузки определяет, меньше ли средняя скорость или равна порогу скорости. В этом примере на этапах 620 и 624 используются одинаковые пороговые скорости, но они могут быть различными, если желательно. Если средняя скорость не меньше или равна второму порогу скорости, тогда процесс 600 переходит к этапу 616.
В противном случае, если средняя скорость меньше или равна второй порогу скорости, тогда аппарат предотвращения перегрузки обнаруживает состояние перегрузки и управляет выключением двигателя соответственно на этапе 626. Как только перегрузка или состояние неисправности исправляется или устраняется, двигатель может быть включен или подано питание на двигатель, или работа двигателя может быть возобновлена вместе со свойством предотвращения перегрузки.
Величина порога и способ сравнения (например, меньше, равно и/или больше) могут зависеть от того, используется ли ширина импульса, частота или другая характеристика для мониторинга и сравнения скорости. Дополнительно к этому, пороги могут быть изменены, настроены или определены на основе эксплуатационной среды двигателя, например, окружающей температуры, входного напряжения, тока или других характеристик двигателя или факторов окружающей среды, которые могут влиять на работу двигателя, или их комбинации.
Хотя фиг.4-6 выше описывают примерные процессы для предотвращения перегрузки двигателя, свойство предотвращения перегрузки не ограничивается конкретными этапами, порядком этапов или реализацией, описанными в этих примерах. Различные варианты, например, как описанные на этих фиг.4-6 и повсеместно здесь, включающие, среди прочего, конкретный тип измерения скорости, порог, количество сравнений с порогом и т.д., могут быть выбраны по желанию. Различные процессы могут быть реализованы через один или более процессоров, выполняющих машино-читаемый код (например, программу, программное или микропрограммное обеспечение и др.), проводную систему или интегральные или логические схемы или их комбинацию.
Хотя выше описаны различные варианты осуществления настоящего изобретения, следует понимать, что они представлены только в качестве примера и не являются ограничением. Соответственно, для специалистов в данной области техники очевидно, что в них могут быть внесены различные изменения в форме и деталях без отклонения от сущности и объема изобретения. Таким образом, широта и объем настоящего изобретения не должны ограничиваться каким-либо из описанных выше примеров осуществления, но должны определяться только согласно нижеследующей формуле изобретения и ее эквивалентам. Таким образом, в объем настоящего изобретения входят и другие типы двигателей.
Изобретение относится к области электротехники и может быть использовано для предотвращения состояния перегрузки в двигателях, а именно в двигателях постоянного тока с возбуждением от постоянных магнитов, используемых, например, в возвратно-поступательных или поворотных приводах. Техническим результатом является повышение эффективности обнаружения перегрузки. Способ, устройство или компьютерная программа реализует подход предотвращения перегрузки, предполагающий мониторинг скорости двигателя, обнаружение состояния перегрузки двигателя на основе отслеживаемой средней скорости и управление работой двигателя согласно обнаруженному состоянию перегрузки. 3 н.п. и 20 з.п. ф-лы, 9 ил.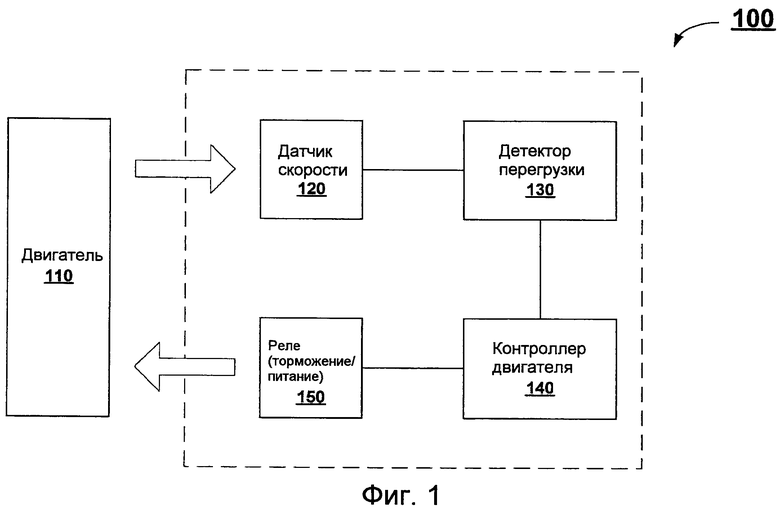
1. Способ управления работой двигателя согласно состоянию нагрузки, содержащий: мониторинг скорости двигателя;
обнаружение состояния нагрузки двигателя на основе отслеживаемой скорости для определения состояния хода двигателя, причем обнаружение содержит сравнение отслеживаемой скорости с первым порогом скорости и в зависимости от этого сравнения вычисление средней скорости за период времени или за количество измерений скорости и определение, существует состояние нагрузки или нет, на основе сравнения вычисленной средней скорости с порогом средней скорости; и управление работой двигателя согласно обнаруженному состоянию перегрузки.
2. Способ по п.1, в котором операция обнаружения обнаруживает существование состояния нагрузки, когда вычисленная средняя скорость меньше, чем порог средней скорости, который отражает минимальную рабочую скорость.
3. Способ по п.1, в котором первый порог или порог средней скорости настраивается согласно входному напряжению и/или окружающей температуре.
4. Способ по п.1, в котором операция мониторинга выдает импульс, имеющий ширину, которая отражает скорость двигателя, и операция сравнения сравнивает ширину выдаваемого импульса с первым порогом.
5. Способ по п.1, в котором операция мониторинга выдает импульсы, имеющие ширину, которая отражает скорость двигателя, и операция сравнения сравнивает среднюю ширину множества выдаваемых импульсов за заданный период или количество измерений с порогом средней скорости для определения, существует состояние нагрузки или нет.
6. Способ по п.1, в котором операция мониторинга отслеживает скорость двигателя с помощью бесконтактной конфигурации датчика.
7. Способ по п.6, в котором бесконтактная конфигурация датчика содержит аппарат на эффекте Холла, расположенный для распознавания магнитного поля, создаваемого магнитом, соединенным с валом двигателя.
8. Способ по п.6, в котором бесконтактная конфигурация датчика содержит оптический датчик.
9. Способ по п.1, в котором управление предотвращает работу двигателя, когда состояние нагрузки сохраняется.
10. Способ по п.1, в котором состояние нагрузки включает в себя и конец хода двигателя.
11. Способ по п.1, в котором состояние нагрузки включает в себя заклинивание в середине хода или перегрузку.
12. Устройство для управления работой двигателя согласно состоянию нагрузки, содержащее: датчик для мониторинга скорости двигателя; детекторный модуль для обнаружения состояния нагрузки двигателя на основе отслеживаемой скорости для определения состояния хода двигателя, причем детекторный модуль сравнивает отслеживаемую скорость с первым порогом скорости и в зависимости от этого сравнения вычисляет среднюю скорость за период времени или за количество измерений скорости и определяет, существует состояние нагрузки или нет, на основе сравнения вычисленной средней скорости с порогом средней скорости; модуль управления для управления работой двигателя согласно обнаруженному состоянию нагрузки.
13. Устройство по п.12, в котором детекторный модуль обнаруживает состояние нагрузки, когда вычисленная средняя скорость двигателя меньше, чем порог средней скорости, который отражает минимальную рабочую скорость.
14. Устройство по п.12, в котором первый порог или порог средней скорости настраивается согласно входному напряжению и/или окружающей температуре.
15. Устройство по п.12, в котором датчик выдает импульс, имеющий ширину, которая отражает скорость двигателя, и детекторный модуль сравнивает ширину выдаваемого импульса с первым порогом.
16. Устройство по п.12, в котором датчик выдает импульсы, имеющие ширину, которая отражает скорость двигателя, и детекторный модуль сравнивает среднюю ширину множества выдаваемых импульсов за заданный период или количество измерений с порогом средней скорости для определения, существует состояние нагрузки или нет.
17. Устройство по п.12, в котором датчик отслеживает скорость двигателя с помощью бесконтактной конфигурации датчика.
18. Устройство по п.17, в котором бесконтактная конфигурация датчика содержит аппарат на эффекте Холла, который распознает магнитное поле магнита, соединенного с валом двигателя.
19. Устройство по п.17, в котором бесконтактная конфигурация датчика содержит оптический датчик.
20. Устройство по п.12, в котором модуль контроллера предотвращает работу двигателя, когда состояние нагрузки сохраняется.
21. Устройство по п.20, дополнительно содержащее реле для выключения двигателя, когда обнаруживается состояние нагрузки на основе команды от модуля контроллера.
22. Устройство по п.12, дополнительно содержащее печатную плату, включающую в себя детекторный модуль и модуль контроллера.
23. Материальная компьютерная среда, имеющая машиноисполняемый код, который при исполнении процессором выполняет следующий способ: отслеживание скорости двигателя; обнаружение состояния перегрузки двигателя на основе отслеживаемой скорости для определения состояния хода двигателя, причем обнаружение содержит сравнение отслеживаемой скорости с первым порогом скорости и в зависимости от этого сравнения вычисление средней скорости за период времени или за количество измерений скорости и определение, существует состояние нагрузки или нет, на основе сравнения вычисленной средней скорости с порогом средней скорости; и управление работой двигателя согласно обнаруженному состоянию нагрузки.
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ ОТ ПЕРЕГРУЗКИ И ОБРЫВА ФАЗЫ | 1992 |
|
RU2025858C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ТРЕХФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ ОТ АВАРИЙНЫХ РЕЖИМОВ РАБОТЫ | 1999 |
|
RU2182395C2 |
| Способ защиты асинхронного электродвигателя от перегрузок,обрыва фазы и незапуска | 1986 |
|
SU1374328A1 |
| Устройство для защиты электродвигателя от перегрузки | 1989 |
|
SU1690067A1 |
| Станок для выпрямления гвоздей | 1932 |
|
SU33379A1 |
| US 5627710 A, 06.05.1997 | |||
| US 6026926 A, 22.02.2000 | |||
| DE 3221080 C1, 05.01.1984 | |||
| JP 11215687 A, 06.08.1984 | |||
| JP 2001191933 A, 17.07.2001. | |||

