Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству и способу управления и регулировки работы устройств с приводом от электродвигателя. Более конкретно, изобретение относится к устройству и способу, предназначенным для управления и регулирования рабочих параметров насосов, крыльчаток, винтовых конвейеров, вентиляторов, роторов или аналогичных устройств, работающих от электродвигателей в небольших электрических устройствах, таких как бытовые приборы, и в устройствах, предназначенных для подготовки и раздачи пищевых продуктов и напитков, например, известных как торговые автоматы и устройства для отелей, ресторанов и кафе.
Уровень техники
В упомянутых выше устройствах электродвигатели используются для преобразования электрической энергии в механическую энергию. Обычно электродвигатели снабжены ротором, закрепленным на приводном валу, и вращающиеся элементы непосредственно или опосредованно соединены с приводным валом двигателя. При подаче электрического напряжения к двигателю вращательное движение передается на ротор, который передает движение на крыльчатки, насосы, роторы, винтовые конвейеры, лопатки или эквивалентные устройства. Электродвигатели, например, используют для работы насосов, которые подают воду в гидравлический контур, для вращения крыльчаток насосов или вентиляторов, для обеспечения работы ротационных теплообменников, миксеров и т.д. Во многих случаях требуется управлять и регулировать работу устройств, соединенных с электродвигателями, путем отслеживания количества оборотов. Другими словами, часто необходимо знать скорость вращения элемента, работающего от электродвигателя. Отслеживание скорости вращения позволяет устанавливать соответствующие регулировки работающего устройства или позволяет управлять его обычными функциями. Причины, которые приводят к нежеланным вариациям скорости вращения работающего устройства, могут быть разными. Например, скорость вращения ротора гидравлического насоса, первоначально установленная равной эталонному значению, может изменяться из-за изменения сопротивления соответствующего гидравлического контура, например, из-за неправильной регулировки клапана, установленного в этом контуре, или из-за накопления накипи или засорения в подшипниках ротора.
В традиционных системах контроля и регулирования используют спидометры (механический, электронный, оптический и т.д.), кодеры, стробоскопы и т.д., предназначенные для отслеживания угловой скорости устройств, работающих с приводом от соответствующего электродвигателя. Инструменты такого типа обеспечивают выходной сигнал, пропорциональный измеренному значению угловой скорости вала, на котором они установлены. Традиционные системы управления и регулирования являются трудоемкими при сборке на вращающихся деталях, сложными при калибровке, и, в некоторых случаях, их можно легко повредить; они являются громоздкими и, таким образом, необходимо обеспечивать пространство для их сборки на валу и/или на вращающемся элементе. Кроме того, их правильное функционирование требуется периодически проверять.
В некоторых вариантах применения, например, в устройствах для раздачи напитков, насосы, работающие для обеспечения циркуляции воды или других пищевых жидкостей, таких как сиропы, должны иметь малую стоимость и уменьшенные размеры. В этих устройствах подача воды в контур распределения обычно осуществляется насосом, который содержит крыльчатку, погруженную в резервуар с водой. Когда, как обычно для этого типа насосов, скорость вращения крыльчатки уменьшается из-за накопления накипи и осаждений на соответствующих подшипниках, количество жидкости, например воды или сиропа, подаваемой в заданный период времени (например, 10 секунд) с помощью насоса, становится меньшим, чем оптимальное значение для того же времени подачи, в результате происходят отрицательные изменения органолептических характеристик напитка.
Таким образом, существует потребность в системе, предназначенной для управления и регулирования работы крыльчатки в упомянутом выше случае и обычно для управления и регулирования работы устройства, с приводом от двигателя, для компенсации нежелательных изменений рабочих параметров, таких как угловая скорость приводного вала, и обеспечения правильного функционирования работающего устройства.
В JP-A-62213594 раскрыт способ и устройство плавного повторного запуска двигателя переменного тока после прерывания подачи питания, которое обеспечивает измерение остаточного напряжения двигателя во время свободного вращения и включает установочный переключатель, когда значение упомянутого остаточного напряжения становится равным заданному значению или ниже для повторного запуска двигателя с помощью преобразователя. В JP-A-6098594 раскрыта аналогичная система. В JP-A-6070593 также раскрыта аналогичная система, дополнительно содержащая средство управления силовым питанием, когда остаточное напряжение равно нулю.
Раскрытие изобретения
Цель настоящего изобретения состоит в решении упомянутой выше проблемы благодаря предоставлению способа и устройства, предназначенных для управления работой устройств, с приводом от электрических двигателей, в которых недостатки известных систем устраняются простым и эффективным способом, причем это устройство имеет минимальные размеры и не требует сложной разводки проводов. Способ и устройство в соответствии с настоящим изобретением обеспечивает возможность эффективного управления и регулирования насосами, крыльчатками, винтовыми конвейерами, вентиляторами, роторами, роторами или аналогичными устройствами, работающими от электродвигателей, в частности в устройствах, предназначенных для приготовления и/или раздачи пищевых продуктов и напитков.
Другая цель настоящего изобретения состоит в создании способа и устройства, предназначенных для управления и регулирования устройствами вращения, с приводом от электродвигателей, которые обеспечивают возможность измерения угловой скорости устройства, вращаемого двигателем, и которые обеспечивают возможность управления с обратной связью этим двигателем на основе значений измеренной скорости.
Также цель настоящего изобретения состоит в создании способа и устройства, предназначенных для эффективного, простого и надежного управления и регулирования устройств для раздачи напитков или пищевых продуктов (также продуктов, готовых к употреблению), причем на этих устройствах предусмотрены устройства, работающие от электродвигателей.
Эти и другие цели достигаются с помощью настоящего изобретения, которое относится к способу в соответствии с п.1 формулы изобретения.
Способ в соответствии с настоящим изобретением обеспечивает то, что двигатель, вращающий устройство, с которым он соединен, например крыльчатку, временно отключают, по меньшей мере, один раз на заданный интервал времени, который может быть определен как ”время отключения”, во время работы устройства. Другими словами, в двигатель, во время его работы, не подают электропитание, необходимое для его работы для выполнения требуемой задачи, например, накачки воды в бойлер. В течение времени отключения двигатель работает как генератор напряжения: его ротор продолжает вращаться (в режиме "остаточного вращения") вместе с устройством, с которым он соединен.
Электрическое напряжение, генерируемое при остаточном вращении, представляет собой меру скорости вращения приводного вала двигателя и обозначает угловую скорость устройства, соединенного с двигателем. Во время этапа отключения электропитания двигатель работает как генератор напряжения. Напряжение, подаваемое двигателем, обозначает количество оборотов (в минуту) ротора. Другими словами, измеряя напряжение, генерируемое электродвигателем, детектируют скорость вращения ротора и, таким образом, определяют угловую скорость вращения вала двигателя, который обычно представляет собой единую деталь с ротором. Измерение угловой скорости выполняют для регулирования, по меньшей мере, одного рабочего параметра двигателя и/или установки (или устройства), в которой работает двигатель. Кроме того, путем измерения скорости вращения в дискретные интервалы времени, которые могут быть регулярными или нерегулярными, становится возможным осуществлять диагностический контроль за работой двигателя и соответствующей установки. Для специалиста в данной области техники будет понятно, что управление и регулирование электродвигателя и соответствующей установки (или устройства) может быть обеспечено во время работы в режиме реального времени, то есть возможно осуществлять способ в соответствии с настоящим изобретением в заданные интервалы времени (например, когда устройство включают и один или больше раз в сутки) или непрерывно во время работы устройства (то есть способ выполняют постоянно во время всего времени работы устройства).
Измерение скорости вращения ротора предоставляет полезную информацию, которая позволяет проверять правильность функционирования двигателя и, в общем, устройств, в которых установлены двигатели, для привода насосов, винтовых конвейеров, крыльчаток и т.д. Например, становится возможным проверять, находится ли в пределах требуемых конструктивных параметров сопротивление вращению подшипников вала. Другими словами, способ в соответствии с настоящим изобретением обеспечивает возможность воплощения диагностического контроля функционирования электродвигателя и устройства, с которым он соединен.
Способ в соответствии с настоящим изобретением предусматривает этап регулирования работы установок, устройств, раздаточных устройств и т.д., в которых предусмотрены электродвигатели для привода таких устройств. Регулировки осуществляются на основе сравнения значений остаточного напряжения, измеренного в течение времени отключения, со значениями, сохраненными в памяти ЦПУ или аналогичном вычислительном средстве. Если будет обнаружена разница, рабочие параметры модифицируют для компенсации упомянутой разницы, или генерируется сигнал тревоги и запрос на техническое обслуживание.
В соответствии с предпочтительным вариантом воплощения изобретения значения остаточного напряжения преобразуют в значения угловой скорости, и этап сравнения выполняют над измеренными и сохраненными в запоминающем устройстве значениями угловой скорости.
Например, способ в соответствии с изобретением осуществляется для регулировки электродвигателя, соединенного с крыльчаткой, которая подает воду в устройства для приготовления и раздачи напитков, таких как кофе, капучино, чай и т.д. Когда осуществляется измерение остаточного напряжения, генерируемого электродвигателем в течение времени отключения двигателя, в способе предусмотрен этап регулирования двигателя (или двигателей) раздаточного устройства на основе результата сравнения соответствующих значений угловой скорости с сохраненными в памяти значениями для проверки возможной разности этих значений. Например, могут быть изменены скорость вращения двигателя (обороты в минуту) или время работы.
Другими словами, способ обеспечивает возможность регулирования с обратной связью (в режиме реального времени) электродвигателя, осуществляемого на основе измеренного значения напряжения, генерируемого во время отключения подачи энергии в двигатель, и затем на основе значения скорости вращения. В качестве альтернативы, или вместе с управлением двигателем с обратной связью, обеспечивается управление с обратной связью силовым генератором, который подает питание в двигатель, то есть возможно модифицировать напряжение питания этого двигателя. Таким образом, обеспечивается возможность управления и регулирования, например, устройства для приготовления и раздачи напитков, таким образом, что будут компенсироваться возможные изменения рабочих параметров относительно заданных значений.
Среди параметров, которые можно регулировать, присутствует, например, скорость вращения двигателя, например, количество оборотов в минуту двигателя, крутящий момент, мощность, время работы, время остановки и т.д. Регулирование двигателя может быть обеспечено также опосредованно, например, путем воздействия на клапаны гидравлического контура, в котором работает насос, привод которого осуществляется от электродвигателя таким образом, что вследствие этого будет установлен расход жидкости в контуре.
Настоящее изобретение также относится к устройству по п.7 формулы изобретения. Устройство содержит средство, предназначенное для временного отключения электропитания двигателя, и устройство измерения напряжения, предназначенное для отслеживания напряжения, получаемого от двигателя, в течение времени t прерывания подачи питания, и модуль управления, предназначенный для сравнения измеренных значений, по меньшей мере, с одним сохраненным в запоминающем устройстве значением.
Средство временного отключения питания электродвигателя может содержать, например, транзистор. Этот транзистор предпочтительно регулируют с помощью таймера.
В соответствии с вариантом воплощения устройства устройство измерения напряжения содержит вольтметр. В качестве альтернативы устройство измерения напряжения представляет собой электронную схему. Сигнал напряжения, детектируемый устройством измерения напряжения, например вольтметром, может обрабатываться непосредственно или предпочтительно после преобразования в цифровой сигнал. Это может осуществляться с помощью устройства с аналогово/цифровым A/D (А/Ц) преобразователем.
Модуль управления имеет функцию управления средством отключения питания и устройством измерения напряжения и обработки сигнала напряжения, предоставляемого соответствующим устройством измерения. В предпочтительном варианте воплощения модуль управления установлен для преобразования, известным способом, измеренных значений напряжения в соответствующие значения угловой скорости для сравнения их с опорным значением (значениями) и на основе разности между такими значениями, для регулирования рабочих параметров электродвигателя. Например, он регулирует обороты в минуту электродвигателя или подаваемую механическую мощность, крутящий момент, время работы двигателя или нерабочее время и т.д.
В следующем описании делает ссылка на не ограничивающий пример крыльчатки для циркуляции воды в устройствах, предназначенных для приготовления кофе (раздаточные устройства). Крыльчатка подвергается износу, накоплению осадков-накипи и загрязнению в соответствующих подшипниках, и в них возникают другие отрицательные эффекты, которые приводят к увеличению сопротивления вращению. Способ и устройство в соответствии с настоящим изобретением позволяют регулировать скорость вращения крыльчатки таким образом, чтобы компенсировать упомянутые выше отрицательные эффекты и подавать воду с правильной скоростью/количеством. Таким образом, способ и устройство в соответствии с изобретением обеспечивают возможность управления и регулирования устройства, в котором предусмотрена крыльчатка, например, при поддержании постоянным времени раздачи, путем увеличения скорости вращения в оборотах в минуту или, наоборот, путем увеличения времени работы, для компенсации снижения оборотов в минуту. Таким образом, скорость подачи воды или ее количество, которое крыльчатка подает для приготовления дозы кофе, остаются оптимальными с течением времени.
Чем короче интервал времени для воплощения способа (во время остаточного вращения двигателя) и для измерения генерируемого напряжения, тем более точными получаются расчеты остаточного напряжения и остаточной угловой скорости ротора и/или устройства с приводом от электродвигателя в отношении скорости, соответствующей двигателю, в который подают питание. Что касается описанного выше двигателя, соединенного с крыльчаткой, когда двигатель отключен от источника питания, крыльчатка продолжает вращаться под действием сил инерции, но замедляется в результате сопротивления среды, генерируемого жидкостью, в которую она погружена. Для снижения до минимума влияния жидкости на остаточное напряжение время прерывания питания, то есть время отключения, предпочтительно выбирают в диапазоне от 0,1 до 50 мс, предпочтительно от 0,8 до 2,0 мс и обычно приблизительно 1 мс. Другими словами, длительность надлежащего интервала времени для воплощения способа сводят к минимуму для сведения к минимуму смещения между угловой скоростью, детектируемой в соответствии с изобретением, и угловой скоростью, соответствующей двигателю с нормальным питанием.
Исходя из измеренного значения напряжения на основе характеристической кривой напряжение/количество оборотов двигателя в минуту в конкретных условиях работы рассчитывают значение скорости. В соответствии с такой характеристической (кривой) затем становится возможным комбинировать значение напряжения с точным значением скорости вращения и наоборот. Для каждого типа двигателя и для каждого конкретного варианта применения характеристическая кривая, если она не будет предоставлена производителем, может быть определена с помощью лабораторных испытаний по результатам, по которым получают последовательность значений, которые описывают характеристическую кривую, то есть кривую, которая содержит "опорное значение", упомянутое в пункте 1 формулы изобретения.
Такие испытания могут быть выполнены, например, с использованием двигателя, не подключенного к источнику питания, который приводят во вращение с помощью крыльчатки с разной установленной скоростью вращения. Характеристическая кривая, полученная таким образом, может быть определена как для ”двигателя с отключенным питанием”. Используя такую систему измерения, получают прямое соответствие между измеренным значением напряжения и скоростью вращения крыльчатки (которая известна, поскольку является заданной). Такие испытания фактически позволяют определить характеристическую кривую двигателя во время его функционирования в качестве генератора.
Характеристическая кривая двигателя с отключенным питанием также может быть получена путем приведения в действие устройства при различных рабочих условиях с крыльчаткой, погруженной в воду, и измерения напряжения, генерируемого при отключении двигателя, то есть действуя в соответствии с этим способом на устройство в оптимальных условиях (т.е. в нормальных условиях), когда известна скорость вращения (обороты в минуту), например, когда ее измеряют. Повторяя эти измерения напряжения после отключения в одинаковых или разных условиях, но при d оборотов в минуту двигателя, получают требуемую характеристическую кривую.
В качестве альтернативы характеристическая кривая напряжение/количество оборотов в минуту двигателя может быть определена, когда к двигателю подано питание, и он вращает крыльчатку, погруженную в воду (или другую жидкость, в требуемых конечных рабочих условиях): характеристику детектируют путем подачи питания на двигатель с разными напряжениями и измеряя скорость, соответствующую каждому напряжению, поданному на двигатель. Характеристическую кривую, детектированную таким образом, можно определить как кривую для ”двигателя с подключенным питанием”. Такая характеристическая (кривая) может быть скорректирована для учета замедления крыльчатки, которое происходит во время отключения двигателя и соответствующего снижения значения напряжения.
Обработка сигнала напряжения на основе характеристики ”двигателя с отключенным питанием” или ”скорректированной” характеристики содержит этап сравнения измеренного значения скорости вращения с опорным значением. Разность между такими значениями учитывают для регулировки электродвигателя при повторном подключении его питания.
Этапы прерывания питания и детектирование остаточного напряжения предпочтительно выполняют многократно во время работы устройства.
Изобретение имеет ряд преимуществ. Например, оно позволяет быстро оценивать скорость вращения вала электродвигателя простым способом, независимо от типа двигателя, и позволяет постоянно регулировать или компенсировать возможные смещения от заданных значений, т.е. во время работы устройства, путем воздействия на скорость или другой рабочий параметр устройства для достижения требуемой рабочей характеристики. Фактически этот способ пригоден для всех электродвигателей, которые также могут работать как генераторы напряжения. Кроме того, способ и устройство позволяют свести к минимуму затраты, поскольку устройство можно собирать с использованием недорогостоящих компонентов, без необходимости подключения дорогостоящих инструментов к валу, что предусмотрено вместо этого в традиционных системах.
Другое преимущество изобретения относительно предшествующего уровня техники состоит в том, что оценка угловой скорости устройства, подключенного к электродвигателю, обеспечивается без использования каких-либо внешних элементов на роторе устройства. Это позволяет свести к минимуму размеры ротора устройства.
Дополнительное преимущество настоящего изобретения состоит в том, что угловую скорость устройства, с приводом от электродвигателя, можно детектировать дистанционно, без подключения через интерфейс к этому устройству внешних инструментов. Это может быть, в частности, полезно, когда работающее устройство работает в агрессивной среде или в ”защищенном” режиме. Дистанционное управление и регулировка устройства достигаются простым и эффективным способом.
Способ и устройство в соответствии с настоящим изобретением можно использовать во множестве областей техники, к которым относится изобретение. Обычно способ и устройство в соответствии с настоящим изобретением можно применять во всех случаях, в которых электродвигатели и устройства, для которых они предназначены, не подвергаются частому циклу технического обслуживания. Способ и устройство являются особенно полезными, когда их применяют в области устройств, предназначенных для раздачи напитков, и, в частности, для привода насосов, предназначенных для циркуляции воды или жидкостей, используемых для приготовления напитков. Эти способ и устройство также можно использовать совместно с электродвигателями бытовых приборов, устройств для раздачи закусок или, в общем случае, с двигателями, используемыми для раздачи (готовых или нет) продуктов питания, для привода винтовых конвейеров для льда и т.д.
Способ и устройство в соответствии с настоящим изобретением также позволяет реализовать свойство самодиагностики, т.е. они позволяют проверять, подключен ли электродвигатель к соответствующей нагрузке, или исправен ли двигатель. Когда нагрузка не подключена, при тех же других условиях, скорость вращения двигателя выше, чем скорость, соответствующая подключенной нагрузке, например, скорость может оставаться практически постоянной в течение длительного времени после отключения питания. В этом случае измеренное напряжение не уменьшается до исходного значения, но остается практически неизменным, поскольку вал двигателя не замедляется под воздействием нагрузки. Такие способ и устройство также позволяют проверять, является ли двигатель или соответствующая нагрузка блокированными, например, в результате заедания или заклинивания или в результате отказа двигателя. В этом случае детектируемое напряжение остается постоянным по времени, т.е. оно не уменьшается от исходного значения, например напряжение может быть постоянно равным нулю. Сигнал тревоги генерируется всегда, когда в результате упомянутых выше причин функционирования двигателя и/или нагрузки не соответствуют надлежащим параметрам.
Электродвигатели также используются для передачи поступательного или вращательно-поступательного движения и т.д. Для ясности впредь будем ссылаться на случай, в котором движение, передаваемое двигателем к соединенному устройству, является вращательным. Для специалиста в данной области техники будет понятно, что настоящее изобретение может быть воплощено независимо от типа движения, передаваемого электродвигателем устройству, подключенному к нему.
Краткое описание чертежей
Дополнительные аспекты и преимущества настоящего изобретения будут более подробно описаны со ссылкой на приложенные чертежи, которые представляют не ограничивающий пример, на которых:
на фиг.1 показана схема контура перекачки жидкости для устройств раздачи напитков;
на фиг.2 показана схема первого варианта воплощения устройства в соответствии с настоящим изобретением;
на фиг.3 показана схема второго варианта воплощения устройства в соответствии с настоящим изобретением;
на фиг.4 показана блок-схема последовательности операций способа в соответствии с настоящим изобретением;
на фиг.5 показана схема третьего варианта воплощения устройства в соответствии с настоящим изобретением;
на фиг.6 показана схема четвертого варианта воплощения устройства в соответствии с настоящим изобретением.
Подробное описание изобретения
На фиг.1 схематично показан модуль перекачки воды такого типа, который используется в устройствах для разлива кофе. Крыльчатка 2 установлена внутри контейнера 1 для воды, для нагнетания воды через выходное отверстие 3 контейнера 1. Крыльчатка 2, например, такого типа, который имеет фиксированные радиальные лопасти, содержит вал 4, установленный на подшипники 5. Вал 4 вращается с помощью электродвигателя (не показан) известного типа. Во время работы накипь оседает на подшипниках 5, лопастях крыльчатки 2 или в выходном отверстии 3, вызывая увеличение сопротивления, преодолеваемого крыльчаткой 2, то есть нагрузка, которую должен перемещать электродвигатель, увеличивается. Это приводит к необходимости отслеживания скорости вращения крыльчатки 2.
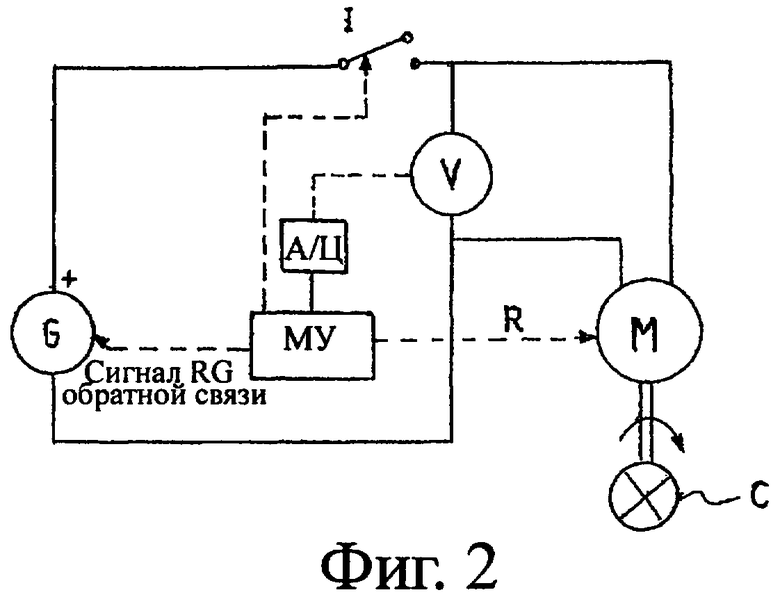
На фиг.2 показана электрическая схема возможной системы привода двигателя М, который вращает нагрузку С, например, через вращающийся вал, непосредственно соединенный с валом двигателя М. Двигатель получает питание от генератора G. Предпочтительно устройство содержит средство I, имеющее функцию отключения питания двигателя М на заданный интервал t1 времени.
В варианте воплощения, показанном на фиг.2, средство блокирования питания двигателя М схематично представлено как переключатель I (на фиг.2 он показан разомкнутым). Когда средство I отключает питание, вал двигателя М продолжает вращаться под действием силы инерции. Нагрузка С может представлять собой крыльчатку, показанную на фиг.1, или насос для пищевых жидкостей, винтовой конвейер для льда и т.д. Нагрузка С продолжает вращаться под действием инерции, например, если нагрузка С представляет собой крыльчатку 2, она может продолжить вращение в течение определенного времени, прежде чем сопротивление воды остановит ее. В общем можно предположить, что в первые моменты времени после отключения генератора G вал двигателя М вращается с той же скоростью, которая соответствует функционированию двигателя М при подаче на него питания.
В течение времени t1 прерывания питания, когда питание на двигатель не поступает, двигатель М работает как генератор напряжения и генерирует напряжение в обмотках статора двигателя, и это напряжение пропорционально скорости вращения.
Устройство в соответствии с изобретением содержит измеритель V напряжения, например, электронную схему, предназначенную для этой цели, которая измеряет остаточное напряжение, генерируемое двигателем М во время отключения, или в течение времени t1 отключения, в результате остаточного вращения приводного вала и устройства.
Как упомянуто выше, каждый период отключения или прерывания двигателя, т.е. каждый отдельный период t1, предпочтительно имеет длительность в диапазоне от 0,1 до 50 мс, предпочтительно от 0,8 до 2,0 мс. В соответствии с предпочтительным вариантом воплощения изобретения прерывание и возобновление питания повторяют несколько раз в течение времени работы устройства с приводом от двигателя. Это означает, что во время работы (например) крыльчатки 2 происходит множество прерываний питания на время t1-tn. Периоды прерывания могут повторяться периодически или осуществляться в разные моменты времени.
Сумма периодов времени отключения (прерывания), ∑t1-tn представляет собой определенный процент всего времени работы устройства, т.е. некоторый процент суммы периодов времени, в течение которого двигатель фактически получает питание, и упомянутой выше суммы периодов времени прерывания ∑t1-tn. Эта величина находится в пределах диапазона от 1% до 50% от общего времени работы устройства, предпочтительно в пределах от 8% до 20% и наиболее предпочтительно составляет приблизительно 10% от общего времени. Другими словами, для получения 10% значения суммы времени прерывания питание требуется прерывать на 1 мс каждые 10 мс, в остальные 9 мс двигатель подключен к источнику питания и работает нормально.
Устройство содержит определенный модуль CU (МУ) управления, например, ЦПУ или любое другое соответствующее средство, предназначенное для сравнения значения измеренного напряжения с "ожидаемым" значением напряжения (или опорным значением) в одних и тех же рабочих условиях. Характеристику напряжение/количество оборотов в минуту двигателя М для принимаемого во внимание устройства сохраняют в запоминающем устройстве модуля управления.
В описанном здесь варианте воплощения, например, в случае двигателя, подключенного к крыльчатке (фиг.1), значения отношения подаваемого напряжения/количества оборотов в минуту, используемые, как опорные значения, могут быть получены несколькими способами, известными в предшествующем уровне техники. Например, они могут быть получены путем выполнения множества испытаний с двигателем, который работает как генератор, с приводом от крыльчатки 2, с разными скоростями вращения. Характеристика, полученная таким образом, может быть определена для ”двигателя с отключенным питанием”. В качестве альтернативы характеристика напряжение/количество оборотов в минуту двигателя может быть получена, используя двигатель с подключенным питанием, который вращает крыльчатку 2, погруженную в воду. Эта характеристика, полученная таким образом, может быть определена как характеристика ”при включенном двигателе”.
Во время отключения двигателя М крыльчатка 2 замедляет свою скорость вращения, и напряжение, подаваемое на двигатель, уменьшается. Поэтому предпочтительно учитывать снижение напряжения для детектирования правильной угловой скорости. По этой причине способ может использовать ”скорректированную” характеристику, т.е. характеристику, в которой принимается во внимание уменьшение напряжения в связи с отключением двигателя М. Скорректированная характеристика может быть определена исходя из характеристики при подключенном двигателе и с использованием соответствующих коэффициентов преобразования или испытаний.
Например, если двигатель получает нормальное питание с напряжением 24 В и нагрузка С вращается со скоростью 500 об/мин, во время отключения двигателя М значение детектируемого напряжения может быть равно приблизительно 20 В. В этом примере скорректированная характеристика будет учитывать снижение напряжения на 4 В, которое зависит от замедления вращения. Коррекция характеристики может осуществляться во время этапов калибровки устройства с помощью испытаний. На основе сохраненных в запоминающем устройстве данных коррекции модуль МУ управления предоставляет в качестве выходных значений величину скорости вращения ротора, равную 500 об/мин, т.е. представляет скорректированное значение, соответствующее скорости вращения, когда питание двигателя включено.
Разность между скорректированной характеристикой и характеристикой ”для двигателя с включенным питанием” уменьшается по мере уменьшения интервала времени, выделяемого для детектирования скорости вращения, до пренебрежимо малого значения, с очевидными преимуществами в отношении точности измерений. Обычно интервал времени для отключения изменяется в зависимости от варианта применения, т.е. в зависимости от двигателя М и ”размера” нагрузки С. Для многих вариантов применения интервал времени составляет 0,01-100 мс.
Во время отключения двигателя М подаваемое напряжение можно измерять один раз или лучше несколько раз. В таком втором случае выполняемые измерения предпочтительно обрабатывают с использованием математических процессов для снижения величины отклонения.
Сигнал напряжения, измеряемый устройством V измерения напряжения, подают в модуль МУ управления, который сравнивает его с сохраненным в запоминающем устройстве опорным сигналом. Предпочтительно сигнал напряжения преобразуют в цифровой сигнал с использованием аналогово/цифрового преобразователя А/Ц. Модуль управления на основе упомянутого выше сравнения определяет скорость вращения или угловую скорость приводного вала 4 и нагрузки С. Если детектируемая скорость не соответствует заданным параметрам для данного конкретного применения, модуль МУ управления соответствующим образом модифицирует рабочие параметры двигателя М. Если модуль МУ управления детектирует, что крыльчатка 2 вращается с меньшим количеством оборотов в минуту, чем ожидается, например, в результате увеличения трения, связанного с накоплением накипи на подшипниках, модуль управления будет компенсировать уменьшенную таким образом скорость путем регулировки одного или больше рабочих параметров устройства. Например, модуль МУ управления увеличивает скорость вращения для компенсации трения и повторно устанавливает заданную скорость вращения. В качестве альтернативы или в дополнение увеличивают время работы крыльчатки.
Как управление, так и регулировка предпочтительно выполняются в режиме реального времени, т.е. во время работы устройства C с приводом от электродвигателя М. Устройство в соответствии с настоящим изобретением также входит в состав системы, предназначенной для диагностики электродвигателей и устройств, к которым они подключены, или аппаратов, в которых предусмотрены такие устройства.
В случае, когда двигатель М и нагрузка С соединены с помощью шестеренчатой передачи, например, в виде адаптера, модуль МУ управления сохраняет в запоминающем устройстве коэффициент передачи/уменьшение количество оборотов для учета угловой скорости нагрузки, а не только скорости вала двигателя М.
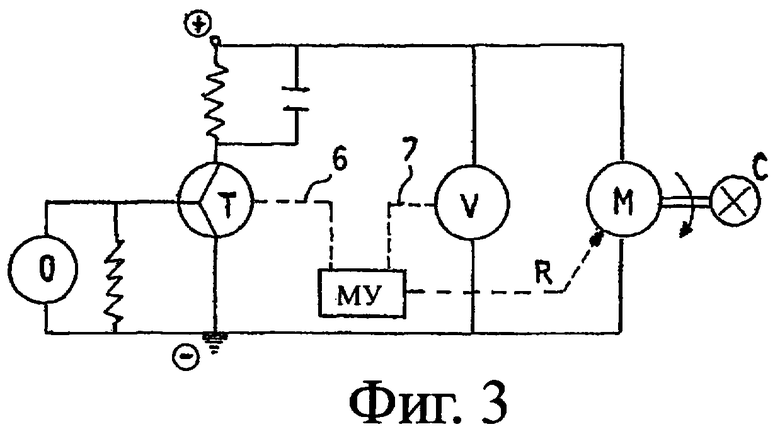
На фиг.3 показан другой вариант воплощения устройства в соответствии с настоящим изобретением, которое предназначено для управления и регулирования электродвигателя М, соединенного с нагрузкой С. В частности, на фиг.3 показана упрощенная электрическая схема устройства. Средство временного отключения питания двигателя М содержит транзистор Т, управляемый генератором О. Через регулярные или нерегулярные временные интервалы генератор О с помощью транзистора разрывает цепь питания двигателя М, прерывая подачу тока. Вольтметр V измеряет напряжение, генерируемое двигателем М, прежде чем питание двигателя М будет вновь подключено.
Модуль МУ управления, если это требуется, имеет дополнительную функцию обработки измеренных значений напряжения с использованием математических методов. Например, если устройство предоставляет в качестве результатов измерения значения напряжения, полученные несколько раз в течение времени отключения, модуль МУ управления рассчитывает среднюю величину измеренных значений, среднеквадратичное отклонение и т.д. Другими словами, модуль МУ управления математически обрабатывает измеренные значения напряжения для сведения к минимуму возможное возникновение ошибки, или для статистики, или также для последующей обработки и передачи данных во внешние удаленные модули.
На фиг.4 показана блок-схема, на которой схематично представлены этапы способа в соответствии с изобретением. Этапы способа в соответствии с данным вариантом воплощения являются теми же, что и описанные выше, за исключением того, что этап регулирования осуществляется перед восстановлением подачи питания в двигатель, а не после него.
Обычно устройство и способ в соответствии с настоящим изобретением позволяют осуществлять эффективное и быстрое управление с обратной связью работой электродвигателя и устройства, подключенного к нему. Фактически, как показано на фиг.2-4, модуль управления может передавать сигнал R обратной связи в двигатель М для модификации, по меньшей мере, одного рабочего параметра на основе ранее детектированной скорости вращения. Например, модуль МУ управления может «потребовать» увеличения выходной мощности двигателя М (или передаваемого крутящего момента) в случае, когда скорость вращения устройства, подключенного к нему, т.е. количество оборотов в минуту нагрузки С, меньше, чем заданное пороговое значение (после сравнения). Кроме того, модуль МУ управления может регулировать крутящий момент, вырабатываемый двигателем, время работы и/или время отключения и т.д., с использованием сигнала R.
В качестве альтернативы или совместно с сигналом R и сигналом управления средства I модуль управления может передавать сигнал RG обратной связи в генератор G напряжения. Такое управление с обратной связью может быть более просто воплощено с использованием более дешевых устройств для управления двигателем М. Сигнал RG будет модифицировать напряжение, подаваемое в двигатель М. Например, для уменьшения количества оборотов в минуту двигателя М, запитываемого напряжением 24 В, модуль управления может передать сигнал RG в генератор G для уменьшения напряжения питания до 22 В.
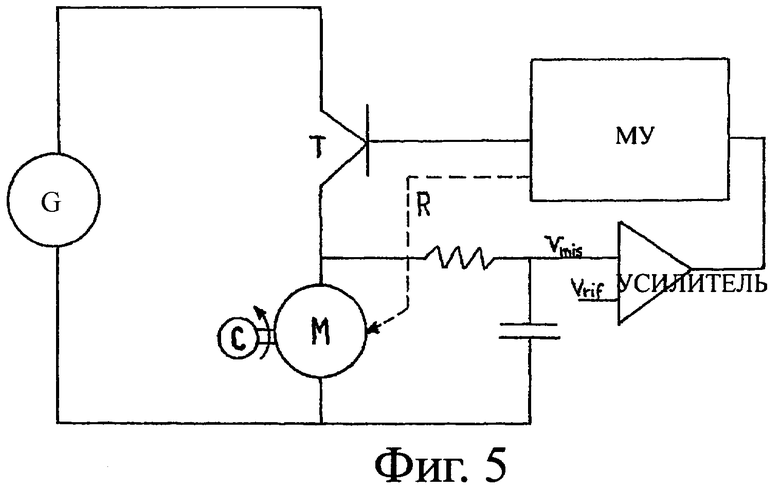
На фиг.5 показан третий вариант воплощения устройства в соответствии с настоящим изобретением. Сигнал VMIS измеренного напряжения, генерируемого двигателем, и сигнал VRIF опорного напряжения подают в усилитель/компаратор AMP. Разность (если она присутствует) между значениями VMIS и VRIF обрабатывают с помощью модуля МУ управления, в котором может быть сохранена характеристика напряжение/количество оборотов в минуту для двигателя М. На основе упомянутой выше разности модуль МУ управления передает сигнал R обратной связи для регулирования двигателя М с подключенным питанием. Регулирование двигателя М может оказать влияние на скорость вращения, передаваемый крутящий момент, (выходную) мощность и т.д. Модуль МУ управления может быть подключен через интерфейс к другим модулям или устройствам или установками, в которых работает двигатель М, таким образом, чтобы обеспечить возможность регулирования устройства или установки.
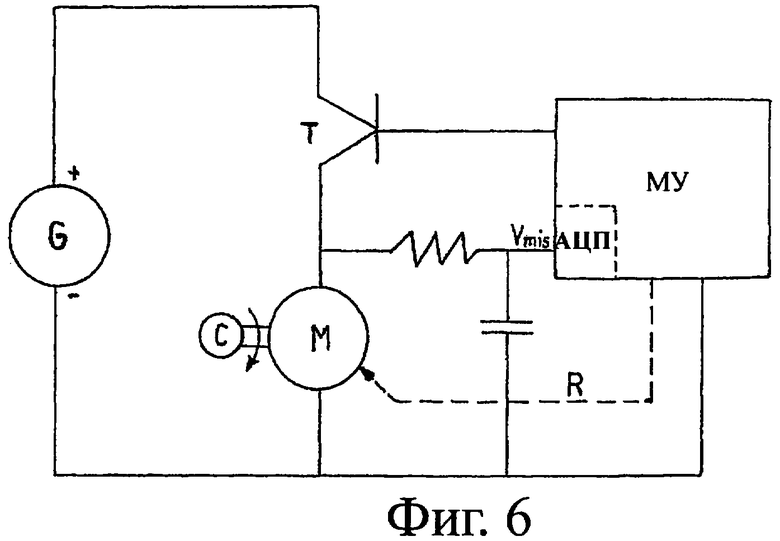
На фиг.6 показан четвертый вариант воплощения устройства в соответствии с настоящим изобретением, в котором модуль МУ управления включает в себя аналогово/цифровой преобразователь ADC (АЦП), предназначенный для преобразования сигнала VMIS напряжения из аналоговой в цифровую форму.
Устройство и способ в соответствии с настоящим изобретением можно использовать также для проведения регулярной диагностики работы электродвигателя М. Фактически, когда двигатель М не подключен к внешнему устройству С, возможно проверить инерцию его ротора. Другими словами, устройство и способ в соответствии с настоящим изобретением позволяют проверять правильность вращения ротора двигателя М, независимо от подключения к внешнему устройству С. Например, устройство, показанное на чертежах, позволяет измерять скорость вращения ротора двигателя М через регулярные интервалы времени для проверки, правильно ли работают подшипники, и не мешают ли они вращению, например, из-за торможения одной или больше направляющих некоторых подшипников, накопления внешних остатков, наличие задиров и т.д. В этом отношении способ и устройство в соответствии с изобретением выполнены с возможностью использования в качестве полезного средства самостоятельной диагностики двигателя М. Диагностика также может содержать детектирование нагрузки С, т.е. способ и устройство также можно использовать для проверки, подключена ли нагрузка С к двигателю М, например, во время запуска этого двигателя.
Например, при использовании способа и устройства в соответствии с изобретением возможно проверять, имеется ли заедание двигателя М, например, из-за задиров, или он работает правильно. Другими словами, способ и устройство позволяют воплотить диагностический контроль над работой двигателя М. Если двигатель М блокирован, например, из-за заедания нагрузки С или из-за отказа, подаваемое напряжение постоянно равно нулю. Кроме того, с помощью способа и устройства в соответствии с изобретением возможно проверять, подключен ли двигатель М к соответствующей нагрузке С или нет. Когда на двигатель М подают нормальное питание, но он не подключен к нагрузке С, скорость вращения вала отключенного двигателя будет выше, чем опорное значение, и будет оставаться практически постоянной в течение длительного времени, поскольку сопротивление не приложено к этому валу со стороны нагрузки. В этом случае модифицированный рабочий параметр представляет собой передачу сигнала тревоги для обозначения заедания/отказа двигателя М (или нагрузки С) или для обозначения того, что нагрузка С не подключена к двигателю М.
Для специалиста в данной области техники будет понятно, что двигатель М может осуществлять привод множества внешних устройств. Например, двигатель М может осуществлять привод гидравлического или пневматического насоса, крыльчатки такого типа, как показана на фиг.1, винтового конвейера, предназначенного для выдачи продукта, насоса для подачи пищевого продукта в контуре (например, сиропа или сока), насоса для циркуляции газообразного фреона (или тому подобное) в контуре охлаждения, вентилятора для удаления паров или горячего воздуха из окружающей среды или из контейнеров, и т.д.
Обычно двигатель М и, таким образом, устройства в соответствии с изобретением можно применять во множестве областей техники. Например, двигатель М может работать в спиральных устройствах сдвига, используемых в автоматах, предназначенных для выдачи закусок или других готовых к употреблению продуктов питания. Двигатель М может осуществлять привод винтового конвейера для льда в устройстве для раздачи напитков, таких как безалкогольные напитки или тому подобное, и т.д.
Способ и устройство в соответствии с настоящим изобретением, в частности, можно использовать для управления и регулирования функций устройств, работающих от электродвигателей, например, используемых в бытовых приборах или в устройствах для раздачи кофе, когда двигатели и соответствующие устройства не подвергаются плановому техническому обслуживанию.
Для специалиста в данной области техники будет понятно, что устройство и способ в соответствии с настоящим изобретением также можно использовать для детектирования силы тока, протекающего через обмотку статора двигателя М. Фактически эта мера также позволяет получить полезную информацию о скорости вращения ротора, даже если сила тока зависит от конструкции двигателя, в частности, зависит от его импеданса, и таким образом, его более трудно анализировать (то есть последующая обработка измеренных значений силы тока будет более сложной, чем последующая обработка данных, относящихся к напряжению).

Изобретение относится к области электротехники и может быть использовано для управления и регулирования рабочих параметров насосов, крыльчаток, винтовых конвейеров, вентиляторов, роторов или аналогичных устройств, работающих от электродвигателей в небольших электрических устройствах, таких как бытовые приборы, в устройствах, предназначенных для подготовки и раздачи пищевых продуктов и напитков, например, известных как торговые автоматы и устройства для отелей, ресторанов и кафе. Техническим результатом является обеспечение эффективного управления и компенсации нежелательных изменений рабочих параметров, таких как угловая скорость приводного вала. Управление и регулирование работой устройства с приводом от электродвигателя осуществляют путем отключения подачи электропитания упомянутому электродвигателю в течение множества временных интервалов во время работы двигателя, измерения в течение этого временного интервала напряжения, поступающего от электродвигателя, сравнения значения измеренного напряжения с опорным значением и, если требуется, на основе упомянутого сравнения, изменения, по меньшей мере, одного параметра, относящегося к функционированию устройства, для компенсации возможных отклонений. 3 н. и 8 з.п. ф-лы, 6 ил.
1. Способ управления и регулирования работы устройства с приводом от электродвигателя, содержащий этапы, на которых: (а) осуществляют привод устройства (2, 4) с помощью электродвигателя (М); (b) отключают подачу электропитания упомянутому электродвигателю (m), по меньшей мере, на один период времени (t1) отключения; (с) измеряют значения напряжения, генерируемого упомянутым электродвигателем, на основании остаточного вращения ротора электродвигателя во время, по меньшей мере, части упомянутого периода времени (t1) отключения; (d) возобновляют подачу электропитания упомянутому двигателю (М) для продолжения работы устройства (2, 4); (е) сравнивают измеренные значения напряжения, по меньшей мере, с одним опорным значением; (f) модифицируют, по меньшей мере, один рабочий параметр для упомянутого устройства (2, 4) в случае, когда это необходимо, по упомянутым результатам сравнения.
2. Способ по п.1, в котором этапы (a)-(f) повторяют для управления и регулирования рабочих параметров упомянутого устройства (2, 4) в режиме реального времени во время его работы с использованием множества периодов времени (t1-tn) отключения и измерений.
3. Способ по п.1 или 2, в котором каждый период времени (t) отключения составляет от 0,1 до 50 мс.
4. Способ по п.3, в котором сумма периодов времени (Σt1-tn) отключения составляет от 10 до 50% от общего времени работы устройства (2, 4).
5. Способ по п.1 или 2, дополнительно содержащий этап детектирования угловой скорости упомянутого ротора (4) и/или устройства (2, 4), подключенного к упомянутому двигателю, путем обработки сигнала, относящегося к значению упомянутого измеренного напряжения.
6. Способ по п.1 или 2, в котором упомянутый рабочий параметр устройства выбирают из следующих параметров: количества оборотов в минуту, крутящего момента, мощности, времени работы, времени прерывания или их комбинации.
7. Устройство управления и регулирования работы устройства с приводом от электродвигателя, содержащее средство измерения напряжения, предназначенное для детектирования напряжения, генерируемого двигателем в течение периода времени отключения подачи электропитания, средство временного отключения подачи электропитания в упомянутый двигатель, модуль (МУ) управления, предназначенный для сравнения измеренного значения напряжения, по меньшей мере, с одним опорным значением, и на основе возможной разности между упомянутыми значениями передачи сигнала регулирования в упомянутый двигатель для модификации, по меньшей мере, одного рабочего параметра упомянутого устройства.
8. Устройство по п.7, в котором упомянутый модуль (МУ) управления установлен с возможностью многократного приведения в действие упомянутого средства временного прерывания подачи электропитания для двигателя (М) и упомянутого средства измерения напряжения.
9. Устройство по п.7, в котором упомянутое средство временного прерывания подачи электропитания содержит, по меньшей мере, один транзистор (Т).
10. Устройство по любому из пп.7-9, дополнительно содержащее аналогово-цифровой преобразователь (АЦ) для преобразования детектируемого сигнала напряжения.
11. Устройство для приготовления и/или раздачи напитков или продуктов питания, характеризующееся тем, что содержит устройство по любому из пп.7-10.
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1992 |
|
RU2065660C1 |
| Устройство для стабилизации скорости вращения электродвигателя постоянного тока | 1971 |
|
SU479209A1 |
| US 6236175 B1, 22.05.2001 | |||
| DE 10242406 A1, 25.03.2004 | |||
| JP 62213594 A, 19.09.1987 | |||
| JP 6098584 A, 08.04.1994 | |||
| Инструмент профилегибочного стана | 1987 |
|
SU1530284A1 |
| 5,6-БИС-(1',2':3',4'-ДИ-О-ИЗОПРОПИЛИДЕН-α-D-ГАЛАКТОПИРАНОЗО-6'-ИЛ)-1,3-ДИИМИНОИЗОИНДОЛИН | 2009 |
|
RU2409586C1 |

