Заявляемое изобретение относится к сельскохозяйственному машиностроению, а именно к малогабаритной почвообрабатывающей технике, и может использоваться для междурядной обработки сельскохозяйственных культур, а также для обработки почвы в садах, на приусадебных участках, в теплицах и т.д. как самоходное, так и несамоходное.
Известно ручное почвообрабатывающее орудие, включающее тележку, на раме которой установлены двигатель и рабочий орган (А.С. СССР №1489595, А 01 В 39/06, 1989 г.).
Недостатком его является низкая маневренность, необходимая для качественной обработки почвы. Это объясняется большим радиусом поворота орудия, и при маневрировании оператору необходимо приподнимать и поворачивать орудие, выводя из контакта с землей рабочий орган и ведущее колесо, что требует больших усилий оператора и нарушает глубину вспашки.
Известно ручное почвообрабатывающее орудие, включающее тележку и установленные на ней двигатель, рабочий орган и рычаги управления (А.С. СССР №1178336, А 01 В 3/50, 3/58, 1985 г.).
Преимуществом его является снижение бокового усилия оператора, приложенного к рычагам управления, на величину усилия, необходимого для сдвига слоя земли рабочим органом без его выглубления.
Его недостаток заключается в том, что для выдерживания нужного направления при прямолинейном движении оператор должен прикладывать постоянные боковые усилия для компенсации реакции почвы на рабочий орган, а при маневрировании он должен постоянно затрачивать усилия на разворот мотоблока. Кроме того, при больших углах поворота резко возрастает реакция почвы на рабочий орган, что повышает нагрузку на двигатель и снижает надежность его работы.
Наиболее близким к заявляемому является ручное почвообрабатывающее орудие, включающее тележку, на раме которой установлены двигатель, рабочий орган и рычаги управления (А.с. СССР №917715, А 01 В 3/58, 1982 г. - прототип).
Преимуществом его является то, что рычаги управления соединены с рабочим органом, что позволяет использовать его в качестве регулятора направления движения орудия и производить маневрирование орудием без выглубления рабочего органа.
Его недостаток заключается в том, что при маневрировании резко возрастает реакция почвы на рабочий орган, что повышает нагрузку на двигатель и снижает надежность его работы, а также требует больших усилий оператора для компенсации реакции почвы на рабочий орган как при прямолинейном движении для обеспечения постоянства направления движения, так и при поворотах.
Задачей заявляемого изобретения является снижение усилий оператора и повышение маневренности орудия при одновременном снижении нагрузки на двигатель.
Поставленная задача решается тем, что в ручном почвообрабатывающем орудии, включающем тележку, на раме которой установлены двигатель, рабочий орган и рычаги управления, на раме впереди и сзади тележки по оси симметрии расположены вертикальные оси, на которых смонтированы вертикальные рамы с возможностью поворота в горизонтальной плоскости, рабочие органы состоят из горизонтальной подрезающей рабочей части и боковых вертикально разрезающих почву ножей, закрепленных на вертикальных рамах, соединенных с рычагами управления и между собой с помощью жестких или гибких тяг.
Поставленная задача решается также тем, что в ручном почвообрабатывающем орудии рама тележки выполнена призматической формы и образована из горизонтальных элементов, жестко соединенных вертикальными стойками.
Поставленная задача решается также тем, что в ручном почвообрабатывающем орудии тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, расположены перекрестно и шарнирно закреплены на внутренних поверхностях диагонально расположенных вертикальных стоек рам, одна из которых соединена с рычагами управления с возможностью поворота рам в разные стороны.
Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, расположены параллельно и шарнирно закреплены на внутренних поверхностях противолежащих вертикальных стоек рам, одна из которых соединена с рычагами управления с возможностью поворота рам в одну сторону.
Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, одними концами шарнирно закреплены на внутренних поверхностях вертикальных стоек рам, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях, смонтированных на общем валу, установленном на раме тележки с возможностью вращения и соединенном с рычагами управления с возможностью поворота рам в разные стороны.
Поставленная задача решается также тем, что в ручном почвообрабатывающем орудии тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, расположены параллельно и шарнирно закреплены на внутренних поверхностях противолежащих вертикальных стоек рам, одна из которых соединена с рычагами управления с возможностью поворота рам в одну сторону.
Поставленная задача решается также тем, что в ручном почвообрабатывающем орудии тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, одними концами шарнирно закреплены на внутренних поверхностях вертикальных стоек рам, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях, смонтированных на осях, каждое звено на своей оси; установленных на раме тележки с возможностью вращения и соединенных с рычагами управления с возможностью поворота рам в разные стороны.
Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены жесткими или гибкими, одними концами шарнирно закреплены на внутренних поверхностях вертикальных стоек рам, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях, смонтированных на осях, каждое звено на своей оси; установленных на раме тележки с возможностью вращения и соединенных с рычагами управления с возможностью поворота рам в одну сторону.
Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены из гибких тросов в оболочке, расположены параллельно и закреплены одними концами на внутренних поверхностях вертикальных стоек одной рамы, а другими концами на наружной поверхности противолежащих вертикальных стоек другой рамы, причем одна из рам соединена с рычагами управления с возможностью их поворота в разные стороны.
Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены из гибких тросов в оболочке, расположены перекрестно и закреплены одними концами на внутренних поверхностях вертикальных стоек одной рамы, а другими концами на наружной поверхности диагонально расположенных вертикальных стоек другой рамы, причем одна из рам соединена с рычагами управления с возможностью их поворота в одну сторону.
Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены из гибких тросов в оболочке, присоединены к вертикальным стойкам одной рамы с внутренней, а другой с наружной стороны, причем свободные концы тяг противолежащих вертикальных стоек обеих рам закреплены на одном из разных рычагов управления с возможностью поворота рам в разные стороны.
Поставленная задача решается также тем, что тяги, соединяющие переднюю и заднюю вертикальные рамы, выполнены из гибких тросов в оболочке, присоединены к вертикальным стойкам одной рамы с внутренней, а другой с наружной стороны, причем свободные концы тяг диагонально расположенных вертикальных стоек обеих рам закреплены на одном из разных рычагов управления с возможностью поворота рам в одну сторону.
Поставленная задача решается также тем, что тяги передней и задней вертикальных рам выполнены из гибких тросов в оболочке, присоединены к вертикальным стойкам одной рамы с внутренней, а другой с наружной стороны, причем тяги каждой рамы своими свободными концами жестко закреплены на одном из разных рычагов управления с возможностью раздельного регулирования поворотом рам.
Поставленная задача решается также тем, что рабочие органы орудия снабжены очистительными устройствами, которые выполнены в виде дисков с режущими зубцами, имеющими одну плоскую поверхность, диски расположены снаружи вертикальных ножей и смонтированы с возможностью вращения на горизонтальных осях, установленных на вертикальных рамах.
Поставленная задача решается также тем, что диски-очистители каждого рабочего органа смонтированы на одной горизонтальной оси, связанной с двигателем орудия с возможностью вращения.
Поставленная задача решается также тем, что вертикальные ножи рабочих органов закреплены на вертикальных рамах с помощью осей, расположенных выше горизонтальных осей дисков-очистителей, на которых жестко установлены эксцентрики или кулачки с возможностью взаимодействия с задней кромкой вертикальных ножей и сообщения им колебательных движений, а нижняя часть ножей снабжена ограничителем поперечных перемещений.
Поставленная задача решается также тем, что вертикальные ножи рабочих органов своей верхней частью закреплены на вертикальных рамах с помощью одной оси, связанной с двигателем орудия, на оси жестко установлены эксцентрики с возможностью взаимодействия с вертикальными ножами и сообщения им колебательных движений, на вертикальных рамах установлены упоры с возможностью взаимодействия с задней кромкой вертикальных ножей, а нижняя часть ножей снабжена ограничителем поперечных перемещений.
На вертикальных осях впереди и сзади тележки по оси симметрии смонтированы вертикальные рамы для обеспечения возможности их поворота в горизонтальной плоскости и закрепления на них рабочих органов.
Рама тележки выполнена призматической формы для возможности закрепления на ней вертикальных осей и свободного размещения внутри нее перекрестных тяг.
Рабочие органы включают горизонтальную подрезающую рабочую часть и боковые вертикально разрезающие почву ножи для установки их под углом к направлению движения орудия, создания усилий его разворота впереди и сзади тележки и уменьшения за счет этого угла поворота рабочих органов при обеспечении заданного радиуса поворота орудия.
Передняя и задняя рамы связаны между собой тягами с возможностью поворота в разные стороны для одновременного поворота вертикальных ножей обеих рам, создания двух усилий разворота орудия, действующих в противоположных направлениях относительно оси симметрии, и уменьшения за счет этого угла поворота ножей при обеспечении заданного радиуса поворота орудия в сравнении с одним рабочим органом.
Передняя и задняя рамы связаны между собой тягами с возможностью поворота в одну сторону для возможности бокового перемещения орудия без углового разворота корпуса и продольной оси симметрии корпуса орудия, что расширяет его функциональные возможности. Таким образом, предлагаемые отличия сообщают заявляемому объекту новый технический эффект - уменьшение угла поворота рабочих органов при обеспечении заданного радиуса поворота орудия и увеличение вариантов маневрирования за счет регулирования движением орудия двумя рабочими органами.
На фиг.1 представлено предлагаемое почвообрабатывающее орудие в трех проекциях при манипулировании одновременно обоими рычагами управления;
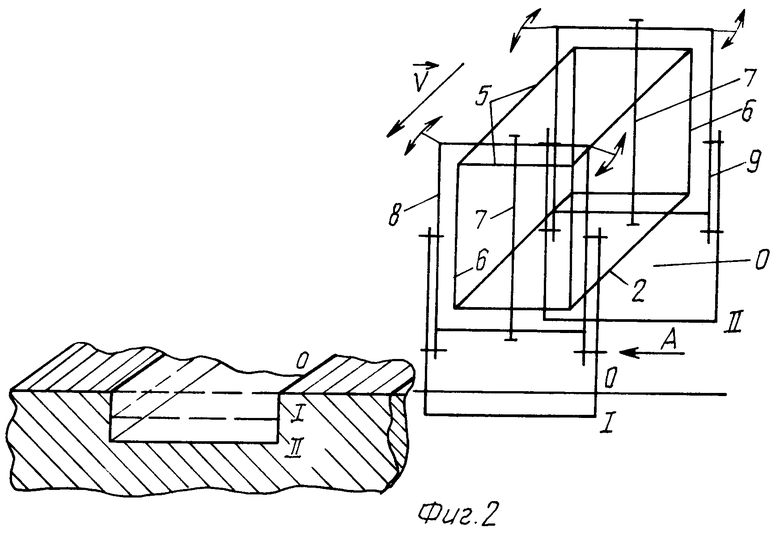
на фиг.2 - кинематическая схема орудия и разрез почвы с указанием глубины обработки передним и задним ножами;
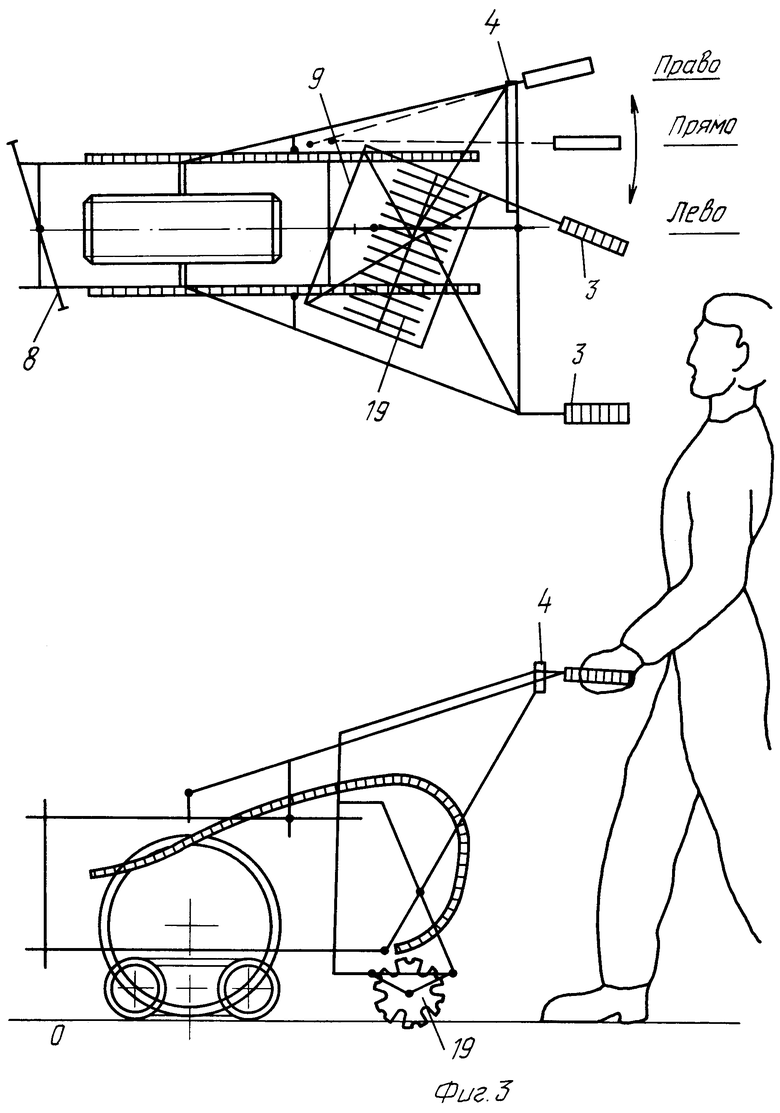
на фиг.3 - предлагаемое орудие в двух проекциях при манипулировании одним рычагом управления;
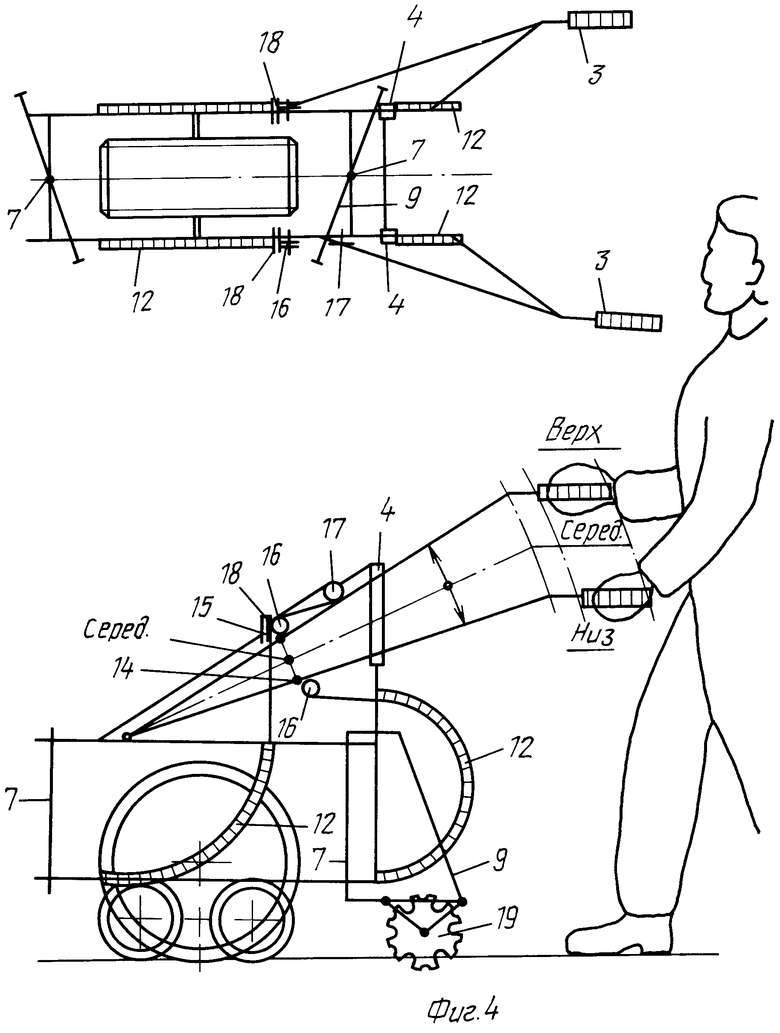
на фиг.4 - предлагаемое орудие в двух проекциях при раздельном манипулировании рычагами управления;
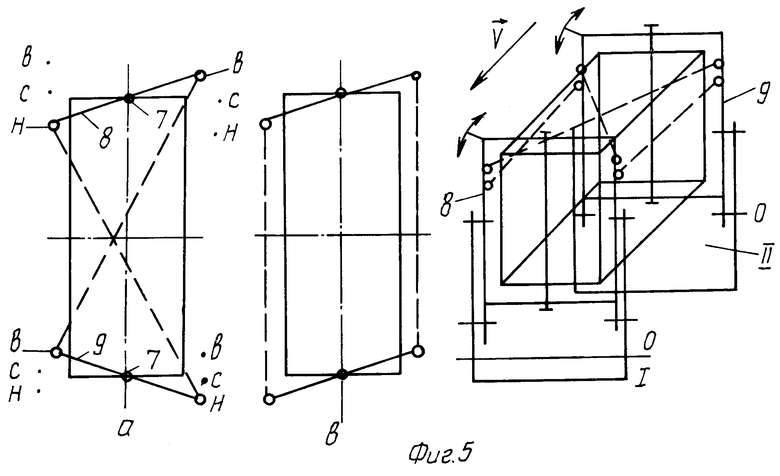
на фиг.5 - пространственное положение жестких или гибких тяг, варианты а и b;
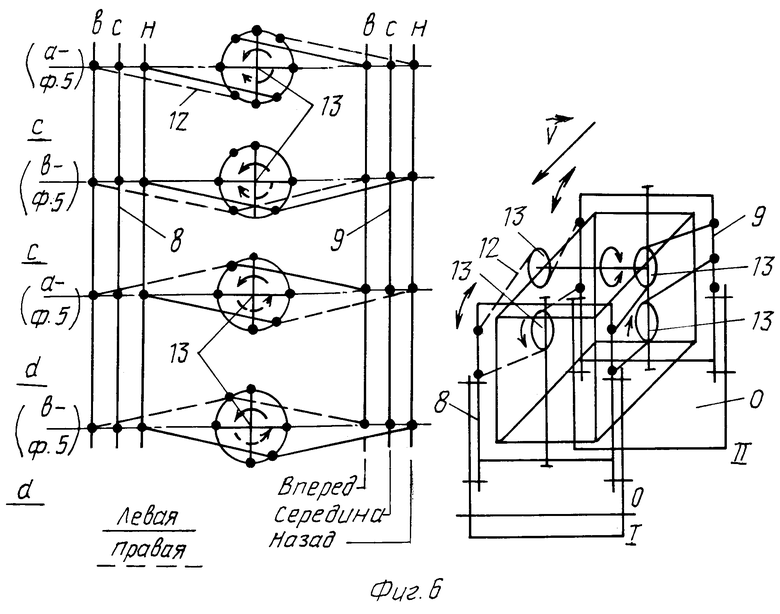
на фиг.6 - пространственное положение жестких или гибких тяг, вариант с (по вариантам а и b соединения тяг фиг.5) и вариант d (по вариантам соединения тяг а и b фиг.5);
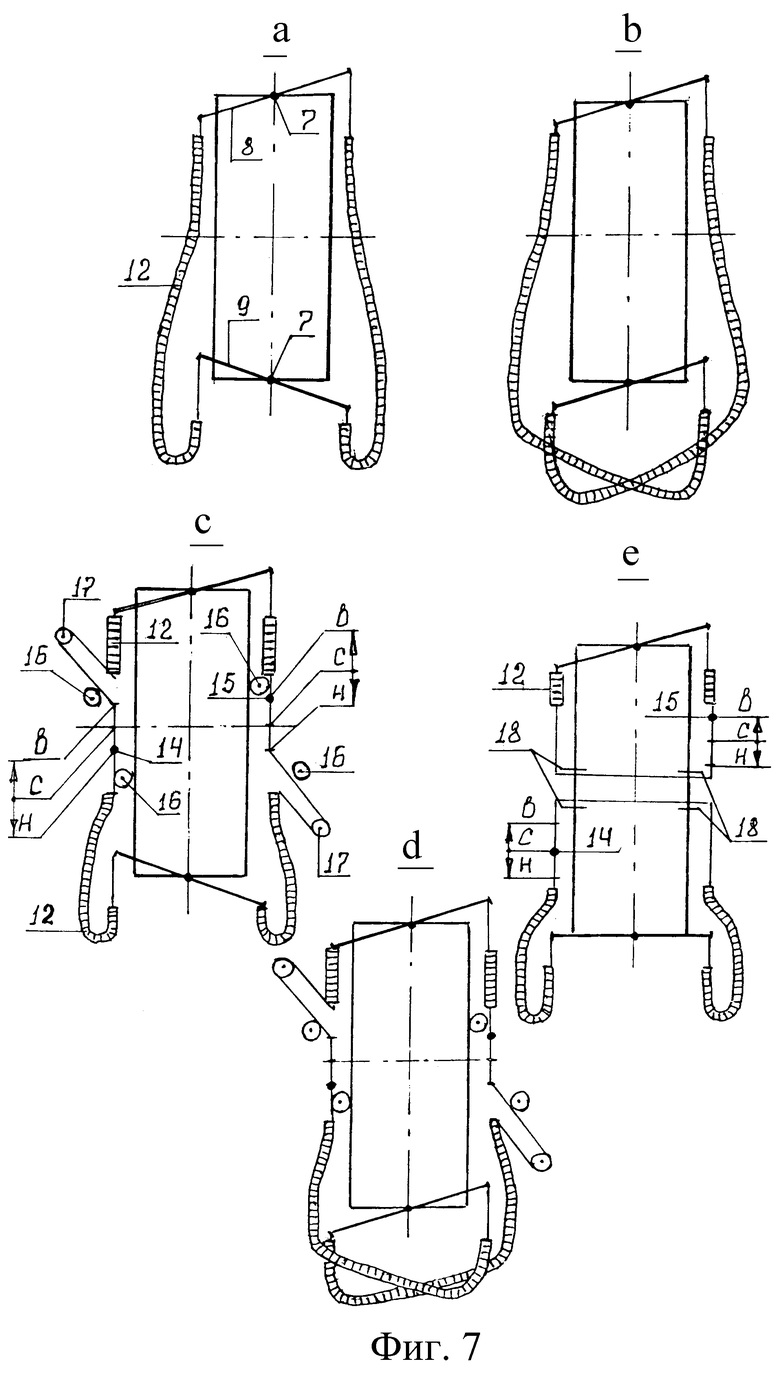
на фиг.7 - схема кинематического соединения рам тягами в виде тросов в оболочке, варианты а, b, с, d, e;
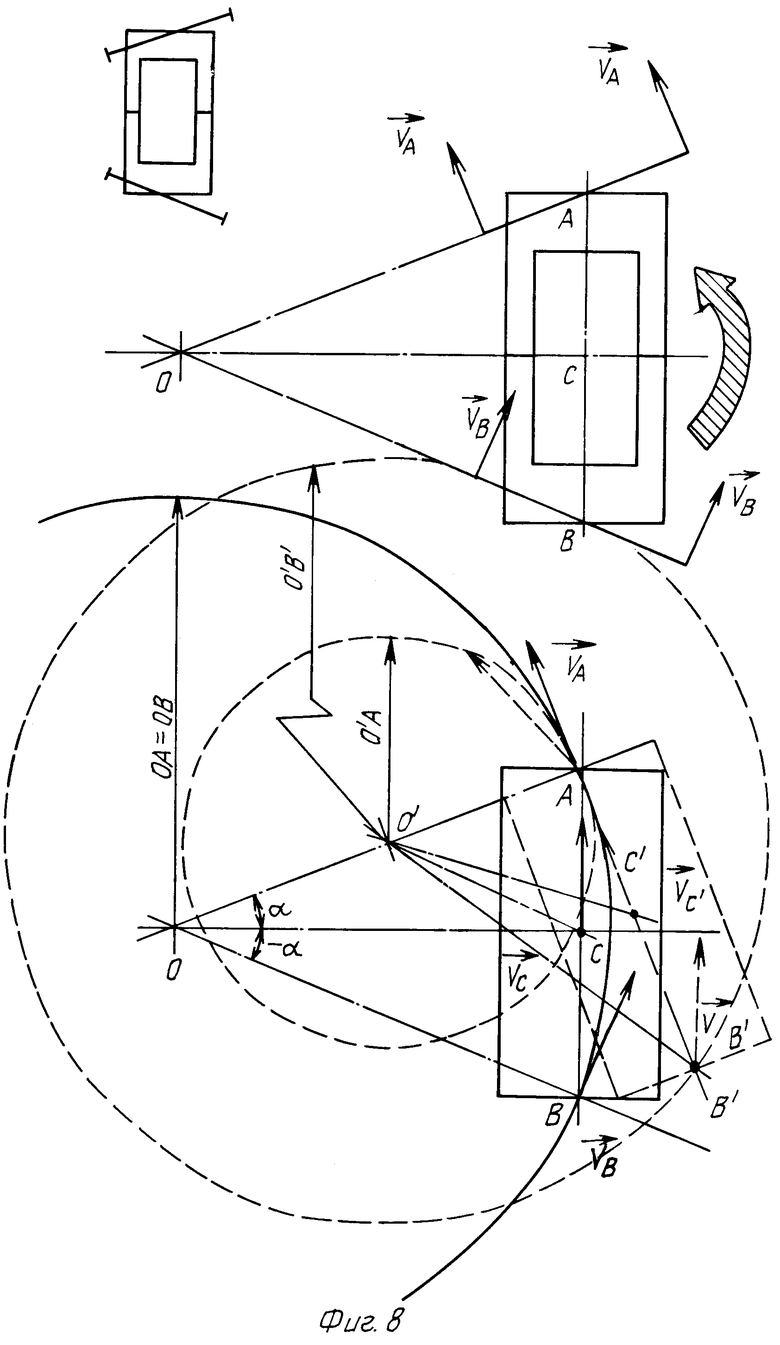
на фиг.8 - схема маневрирования орудием по вариантам а (фиг.5 и фиг.7) и варианту с (фиг.6 по варианту а - фиг.5) и варианту d (фиг.6 по варианту а - фиг.5) и варианту с (фиг.7) связи вертикальных рам;
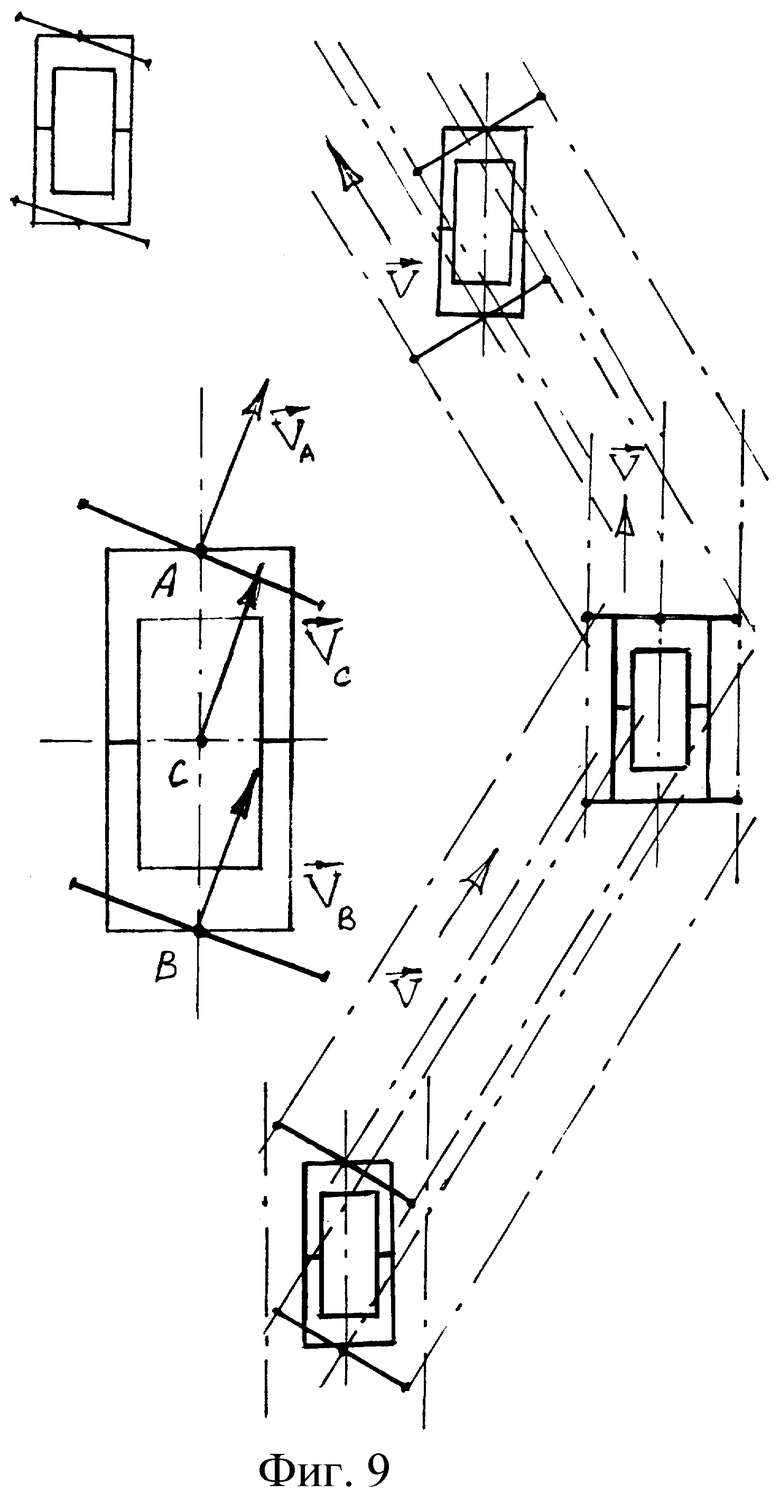
на фиг.9 - схема маневрирования орудием по вариантам b (фиг.5 и фиг.7) и варианту с (фиг.6 по варианту b - фиг.5) и варианту d (фиг.6 по варианту b - фиг.5) и варианту d (фиг.7) связи вертикальных рам;
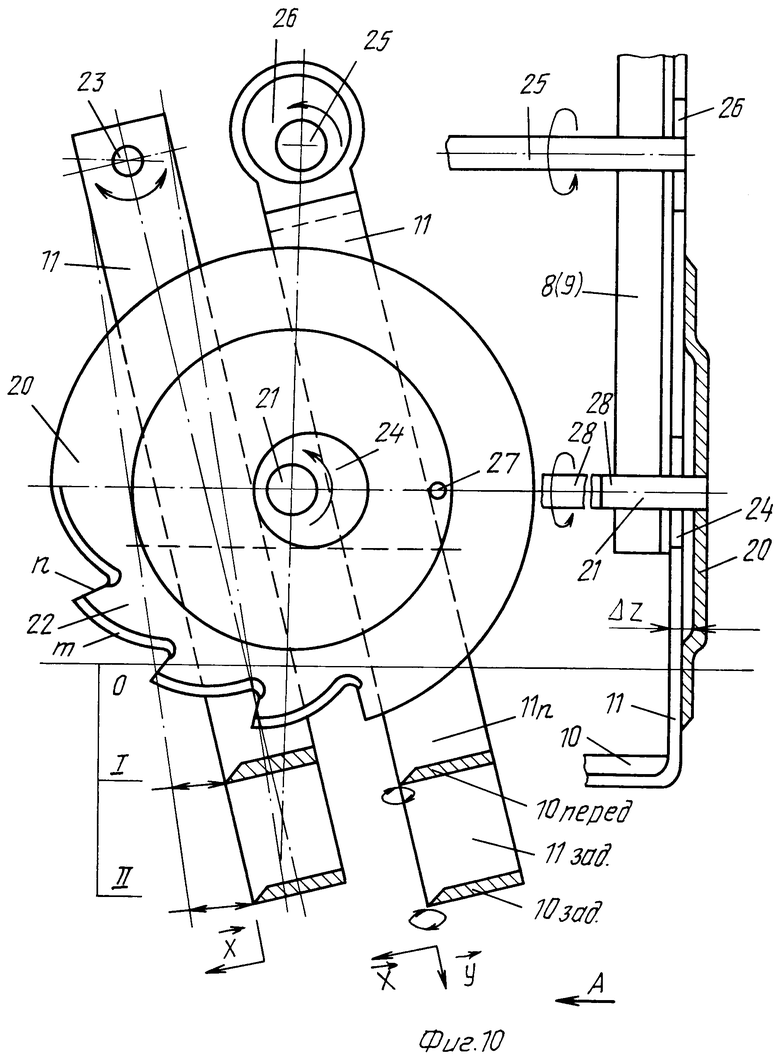
на фиг.10 - диск-очиститель вертикальных ножей рабочих органов в двух проекциях, вид А на фиг.2;
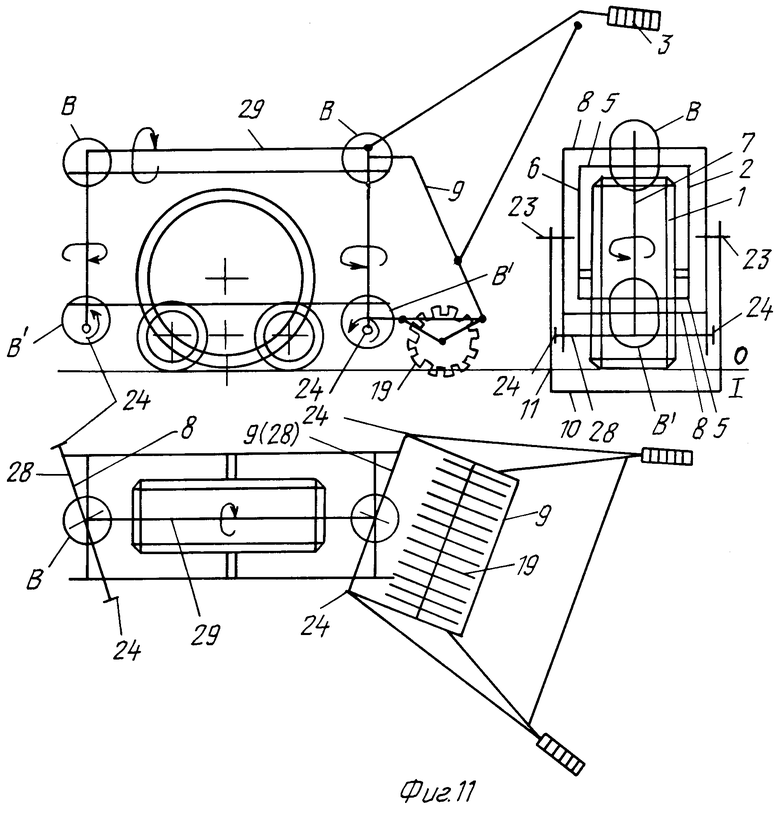
на фиг.11 - предлагаемое орудие в трех проекциях, кинематическая схема передачи колебательных движений рабочим органам и вращательного движения дискам-очистителям от двигателя;
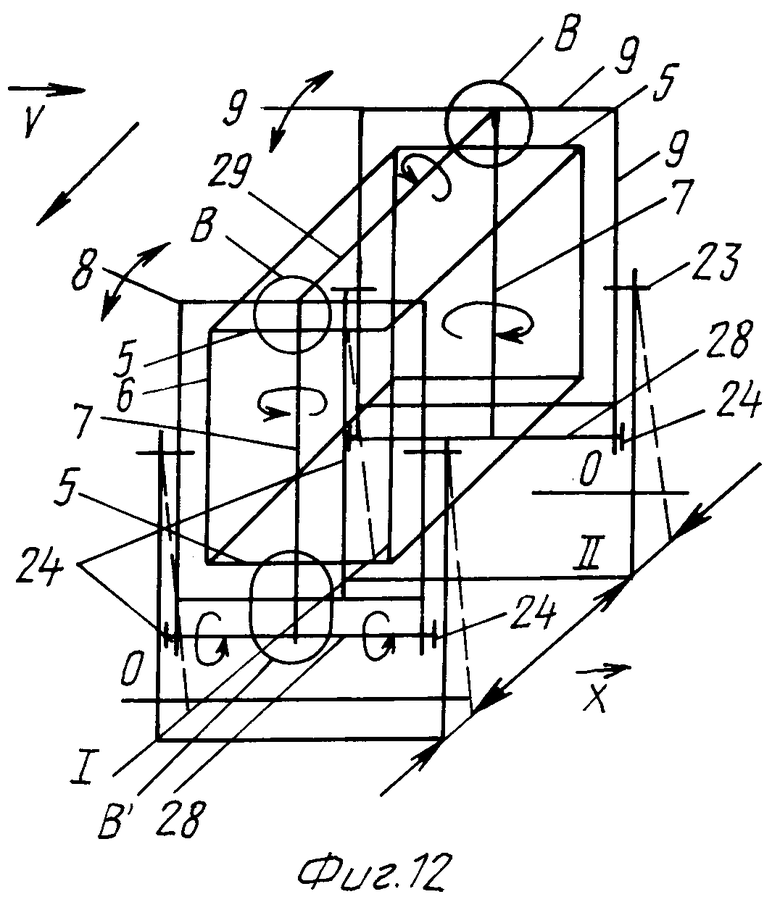
на фиг.12 - кинематическая схема (оксанометрия) передачи колебательных движений рабочим органам и вращательного движения дискам-очистителям от двигателя;
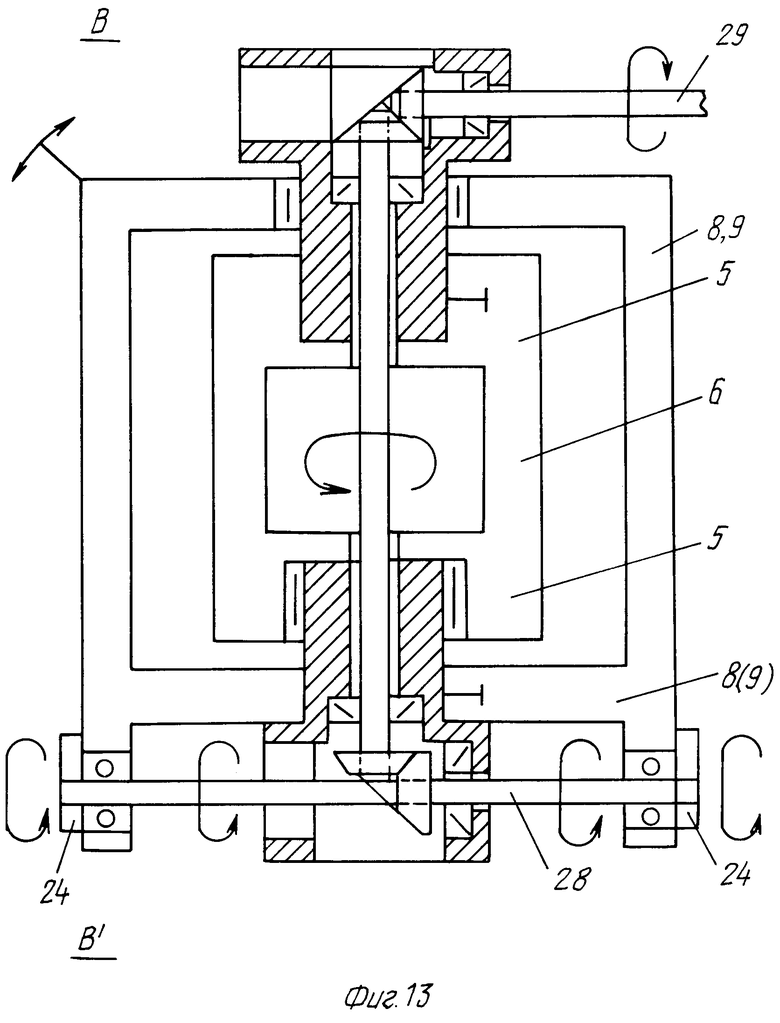
на фиг.13 - узлы В и В1 на фиг.11 и фиг.12.
Орудие состоит из тележки на колесном (или гусеничном) ходу с ведущим колесом 1, на раме 2 которой установлены двигатель (не показан) и рычаги управления движением 3, снабженные ограничителем перемещения - сектором 4, (в варианте на фиг.1 - сектор 4 отсутствует). Рама 2 выполнена призматической формы и образована из горизонтальных элементов 5, жестко соединенных вертикальными стойками 6. На раме 2 впереди и сзади тележки по оси симметрии расположены вертикальные оси-валы 7, на которых навешены вертикальные рамы 8 и 9 с возможностью качания (поворота) в горизонтальной плоскости. Рабочие органы состоят из горизонтальной подрезающей рабочей части 10 и составляющих с ней единое целое боковых вертикально разрезающих почву ножей 11, закрепленных на рамах 8 и 9. Передняя и задняя рамы 8 и 9 соединены между собой тягами 12, которые могут быть жесткими, гибкими или тросами в оболочке.
Представлены следующие варианты соединения тяг 12 с вертикальными рамами 8 и 9.
1. Вариант а (фиг.5) - тяги 12 выполнены жесткими или гибкими, расположены перекрестно и шарнирно закреплены на внутренних поверхностях диагонально расположенных вертикальных стоек рам 8 и 9, задняя рама 9 соединена с рычагами управления 3.
2. Вариант b (фиг.5) - тяги 12 выполнены жесткими или гибкими, расположены параллельно и шарнирно закреплены на внутренних поверхностях противолежащих вертикальных стоек рам 8 и 9, задняя рама 9 соединена с рычагами 3.
3. Вариант d (фиг.6 по варианту а - фиг.5) - тяги 12 выполнены жесткими или гибкими, одни концы тяг 12 закреплены на вертикальных стойках рам 8 и 9, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях 13, расположенных по бокам орудия на общей оси-валу с возможностью поворота звеньев 13 в одну сторону одновременно. Ось-вал расположен выше движителя 1. Звенья 13 могут быть выполнены в виде сектора, где свободные концы жестких тяг 12 каждого борта присоединяются к противоположному (верхнему или нижнему) отверстию сектора. Отверстия сектора расположены по вертикали, проходящей через центр вращения сектора. Если тяги 12 выполнены гибкими (например, в виде троса), то промежуточные звенья 13 выполнены в виде барабана, а тросы тяг 12 рам 8 и 9 к барабану подводятся противоположно сверху или снизу и расположены в вертикальной плоскости, проходящей через центр его вращения.
4. Вариант d (фиг.6 по варианту b - фиг.5) - тяги 12 выполнены жесткими или гибкими, одни концы тяг 12 закреплены на вертикальных стойках рам 8 и 9, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях 13, расположенных по бокам орудия на общей оси-валу с возможностью поворота звеньев 13 в одну сторону одновременно. Ось-вал расположен выше движителя 1. Звенья 13 могут быть выполнены в виде сектора, где свободные концы жестких тяг 12 каждого борта присоединяются к одной, верхней или нижней для каждого борта точке сектора, расположенной по вертикали, проходящей через центр вращения сектора. Если тяги 12 выполнены гибкими (например, в виде троса), то промежуточные звенья 13 выполнены в виде барабана, а тросы тяг 12 рам 8 и 9 к барабану подводятся в одной точке, но противоположно (сверху или снизу плоскости барабана) для каждого борта по-разному, по вертикали, проходящей через центр его вращения.
5. Вариант с (фиг.6 по варианту а - фиг.5) тяги 12 выполнены жесткими или гибкими, одни концы тяг 12 закреплены на вертикальных стойках рам 8 и 9, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях 13, расположенных каждое на своей оси по своему борту (левому или правому) в любом месте на вертикали по боковой поверхности, с возможностью их поворота в разные стороны. Звенья 13 могут быть выполнены в виде сектора, где свободные концы жестких тяг 12 каждого борта присоединяются к противоположному (верхнему или нижнему) отверстию сектора. Отверстия сектора расположены по вертикали, проходящей через центр вращения сектора. Если тяги 12 выполнены гибкими (например, в виде троса), то промежуточные звенья 13 выполнены в виде барабана, а тросы тяг 12 рам 8 и 9 к барабану подводятся одинаково для каждого борта.
6. Вариант с (фиг.6 по варианту b - фиг.5) тяги 12 выполнены жесткими или гибкими, одни концы тяг 12 закреплены на вертикальных стойках рам 8 и 9, а свободные концы тяг противолежащих стоек шарнирно закреплены на промежуточных звеньях 13, расположенных каждое на своей оси по своему борту (левому или правому) в любом месте на вертикали по боковой поверхности, с возможностью их поворота в разные стороны. Звенья 13 могут быть выполнены в виде сектора, где свободные концы жестких тяг 12 каждого борта присоединяются к одной (верхней или нижней), для каждого борта одинаково, точке сектора.
7. Вариант a (фиг.7) - тяги 12 выполнены из тросов в оболочке, расположены параллельно и закреплены одними концами на внутренних поверхностях вертикальных стоек рамы 8, а другими концами на наружных поверхностях противолежащих вертикальных стоек рамы 9, которая соединена с рычагами 3.
8. Вариант b (фиг.7) - тяги 12 выполнены из тросов в оболочке, расположены перекрестно и закреплены одними концами на внутренних поверхностях вертикальных стоек рамы 8, а другими концами на наружных поверхностях диагонально расположенных вертикальных стоек рамы 9, которая соединена с рычагами 3.
9. Вариант с (фиг.7) - тяги 12 выполнены из тросов в оболочке, присоединены к вертикальным стойкам рамы 8 с внутренней, а рамы 9 с наружной стороны, причем свободные концы тяг противолежащих вертикальных стоек обеих рам жестко закреплены на одном из разных рычагов управления 3 в точках 14 и 15, при этом тяги левого борта передней рамы 8* закреплены в точке 14 через натяжные отводные ролики 16 и 17, а тяги левого борта задней рамы 9 через отводные ролики 16.
10. Вариант d (фиг.7) - тяги 12 выполнены из гибких тросов в оболочке, присоединены к вертикальным стойкам рамы 8 с внутренней, а рамы 9 с наружной стороны, причем свободные концы тяг диагонально расположенных вертикальных стоек обеих рам жестко закреплены на одном из разных рычагов 3 в точках 14 и 15, при этом тяги левого борта передней рамы 8 закреплены в точке 14 через натяжные отводные ролики 16 и 17, а тяги задней рамы 9 закреплены в точке 14 через отводные ролики 16.
11. Вариант е (фиг.7) - тяги 12 выполнены из тросов в оболочке, присоединены к вертикальным стойкам рамы 8 с внутренней, а рамы 9 с наружной стороны, причем тяги рамы 8 своими свободными концами жестко закреплены на одном рычаге управления в точке 15 через перекидные ролики 18, а тяги рамы 9 своими свободными концами жестко закреплены на другом рычаге 3 в точке 14 через перекидные ролики 18.
Орудие снабжено стабилизатором устойчивости вертикальной оси орудия и заглубления ножей переднего и заднего рабочих органов и может быть выполнено в виде комкодавителя или катка 19, соединенного с задней рамой 9.
В другом варианте исполнения (не показан) рукоятки управления 3 закреплены на промежуточных звеньях 13 или на их общем валу (показан на фиг.6). Управление тягами 12 достигается одной или двумя рукоятками управления 3, перемещая их в секторе 4 в вертикальной плоскости.
В другом варианте исполнения (не показан) почвообрабатывающее орудие состоит из тележки на колесном (или гусеничном) ходу с ведущим колесом 1, на раме которого установлены двигатель и рукоятки управления 3, снабженные ограничителем перемещения сектором 4. На раме 2 впереди или сзади тележки расположена вертикальная ось 7, на которой смонтирована вертикальная рама 9 с возможностью качания (поворота) в горизонтальной плоскости. Рабочий орган состоит из горизонтальной подрезающей рабочей части 10 и составляющих с ней единое целое вертикально разрезающих почву ножей 11. При расположении оси 7 впереди тележки стабилизатор 19 расположен впереди оси 7.
Рабочие органы предлагаемого орудия снабжены дисками-очистителями 20 (фиг.10), которые расположены снаружи вертикальных ножей 11 и жестко закреплены на осях 21, установленных на рамах 8 и 9. Оси 21 могут быть связаны с двигателем орудия с возможностью вращения. По кольцевой наружной поверхности дисков 20 выполнены режущие зубья 22, имеющие режущую кромку m и плоскую кромку без заточки n.
Вертикальные ножи 11 рабочих органов могут быть закреплены на рамах 8 и 9 с возможностью поворота на осях 23, расположенных выше осей 21, на которых жестко установлены эксцентрики или кулачки 24 с возможностью взаимодействия с задней кромкой ножей 11, нижняя часть которых снабжена ограничителем поперечных перемещений (не показан), расположенным в плоскости ΔZ.
В другом варианте вертикальные ножи 11 каждого рабочего органа могут быть свободно установлены на одной оси 25, связанной с двигателем орудия, на оси 25 жестко установлены эксцентрики 26, а на вертикальных рамах 8 и 9 - упоры 27 с возможностью взаимодействия с задней кромкой ножей 11, нижняя часть ножей 11 снабжена ограничителем поперечных перемещений (не показан), расположенным в плоскости ΔZ.
Для передачи вращения дискам 20 и колебательных движений ножам 11 диски 20 каждого рабочего органа рам 8 и 9 расположены на одном валу 28, который связан с валом-осью 7 через угловой редуктор В1. Валы-оси 7 рам 8 и 9 в верхней части соединены горизонтальным валом 29 через верхние редукторы В. Вал 29 соединен с двигателем орудия.
Почвообрабатывающее орудие работает следующим образом.
При прямолинейном движении вертикальные рамы 8 и 9 находятся в среднем положении и вертикальные ножи 11 испытывают минимальное сопротивление при разрезании почвы. В начале движения горизонтальные части 10 рабочих органов погружаются до соприкосновения с землей ведущего колеса 1 и комкодавителя 19 и обеспечивают равномерное прижатие колес или гусениц тележки к земле без проскальзывания и постоянную глубину вспашки. Горизонтальные части рабочих органов 10 движутся на разной глубине: передний на глубине 0-I, задний на глубине 0-II (фиг.2), что обеспечивает постоянное усилие прижатия рабочего органа к земле без применения балластных грузов.
При маневрировании оператор рычагами 3 поворачивает заднюю раму 9 в сторону, противоположную заданному повороту орудия, на угол - α (фиг.1 и фиг.8), одновременно поворачивается передняя рама 8 в заданном направлении поворота на угол α. При этом вертикальные ножи 11 задней рамы 9 заносят заднюю часть орудия вокруг точки С в сторону, противоположную заданному направлению поворота относительно оси симметрии (фиг.8), и ножи 11 передней рамы 8 заносят вокруг точки С переднюю часть орудия в заданном направлении поворота, в результате чего происходит смещение оси поворота из точки 0 при работе с одним рабочим органом в точку 01 и уменьшение радиуса поворота. При одном рабочем органе при повороте его на угол α радиус поворота орудия составит расстояние ОА и ОВ, в предлагаемом орудии при повороте двух рабочих органов на тот же угол радиус поворота орудия ~ составит расстояние О1А передней рамы 8 и O1В1 задней рамы 9. То есть для обеспечения заданного радиуса поворота при маневрировании оператору потребуется повернуть рамы 8 и 9 с вертикальными ножами 11 на угол, ~ в 2 раза меньший, чем при одном рабочем органе, что уменьшает реакцию почвы на рабочие органы, снижает усилия оператора, снижает нагрузку на двигатель при больших углах поворота и повышает надежность его работы.
Таким образом, вертикальные ножи 11 рабочих органов служат для управления направлением движения при маневрировании, а также для подрезания пласта и фиксации горизонтальных ножей 10 на постоянной глубине.
Почвообрабатывающее орудие обеспечивает 4 варианта управления рычагами 3 по всем вариантам соединения тяг 12 с рамами 8 и 9.
1 вариант - (фиг.1) - рычаги 3 поворачивают одновременно вокруг оси 7 в точке В по вариантам соединения тяг 12, варианту а и b, варианту c и d (фиг.6), варианту а и b (фиг.7).
2 вариант - (фиг.3) - левый рычаг 3 жестко зафиксирован по отношению к корпусу орудия, а правый рычаг 3 перемещают в секторе 4 в горизонтальной плоскости вокруг оси 7 в точке В по вариантам соединения тяг а и b (фиг.5) и с и d (фиг.6), вариант а и b (фиг.7).
3 вариант - (фиг.4) - рычаги 3 перемещают в секторе 4 в вертикальной плоскости в противофазе, т.е. при повороте влево левый рычаг 3 в точке 14 опускают вниз, при этом правый рычаг 3 в точке 15 поднимается вверх на то же расстояние. Тяги 12 по варианту соединения c и d (фиг.7).
4 вариант - (фиг.4) - тяги 12 по вариантам соединения c и d (фиг.7) разъединяют в точках 14 и 15, левую тягу передней рамы 8 через перекидные ролики 18 соединяют в точке 15 с правой тягой 12 передней рамы 8, а правую тягу задней рамы 9 через перекидной ролик 18 соединяют в точке 14 с левой тягой задней рамы 9. Манипулируя рычагами 3 можно получать любое пространственное положение точки А передней рамы 8 и точки В задней рамы 9 независимо друг от друга.
Предлагаемое орудие обеспечивает следующие варианты маневрирования по кинематической связи передней и задней рам 8 и 9.
1. Вариант а (фиг.5) по варианту с (фиг.6 по варианту а - фиг.5), вариант d (фиг.6 по варианту а - фиг.5), вариант а и с (фиг.7) используют для обеспечения высокой маневренности орудия с резкими поворотами при обработке как междурядья, так и между растениями в одном ряду.
2. Вариант b (фиг.5) и вариант с (фиг.6 по варианту b - фиг.5), вариант d (фиг.6 и по варианту b - фиг.5), вариант b и d (фиг.7) используют при междурядной обработке растений, т.е. когда не требуются резкие повороты орудия, орудие совершает движение боком (движение “краб”) без углового разворота корпуса орудия для подхода вплотную к растениям без травмирования растений.
3. Вариант е (фиг.7) обеспечивает полную свободу маневра орудием, ограниченное только равной скоростью переднего и заднего рабочих органов по отношению к земле, которая равна скорости перемещения корпуса орудия и обеспечивает возможность маневрирования по всем вариантам c и d (фиг.7) без изменения кинематической схемы соединения тяг 12 с рамами 8 и 9. При этом рычаги управления регулируются самостоятельно и по-разному, в отличие от вариантов c и d (фиг.7), когда рычаги 3 движутся одинаково и одновременно навстречу друг другу или в разные стороны.
Постоянно стремящиеся заглубиться горизонтальные ножи 10 прижимают плоскость ведущего колеса (или гусеницы) 1 параллельно к плоскости земли, что дает возможность оператору управлять орудием дистанционно.
При наладке почвообрабатывающего орудия по варианту маневрирования по кинематической связи передней и задней рам 8 и 9 по варианту 1 (фиг.5) к уже существующей системе соединения тяг 12 с вертикальными рамами 8 и 9, например вариант 7 (фиг.7) или вариант 9 (фиг.7), добавляют вторую систему соединения тяг 12 с вертикальными рамами 8 и 9, например по варианту 3 (фиг.6). Ось-вал промежуточных звеньев 13 (фиг.6) совершает нужный угловой поворот от двигателя орудия с помощью одного редуктора (не показан), причем направление и величину поворота оси-вала задает оператор с помощью исполнительного механизма дистанционного управления.
При наладке почвообрабатывающего орудия по варианту маневрирования по кинематической связи передней и задней рам 8 и 9 по №3 (фиг.7) в тросовую систему передней и задней рам 8 и 9 встраивают по одному независимому исполнительному механизму дистанционного управления (не показан) с механизмом дистанционного отключения системы, что позволяет в случае необходимости воспользоваться установленной системой управления для оператора без переналадки системы управления орудием.
При движении орудия горизонтальные ножи 10 заглубляют диски-очистители 20 в землю, которая, оказывая давление на плоскую поверхность n зубьев 22, поворачивает диски 20 вокруг осей 21, при этом режущая кромка m зубьев 22 режет попадающуюся сорную растительность, что исключает забивание ножей 11 и остановку орудия для очистки.
Вертикальные ножи 11 при взаимодействии с эксцентриками 24 получают колебания по задней кромке ножей при качании вокруг оси 23 в плоскости х (фиг.10); по ходу движения орудия.
По другому варианту ножи 11, опираясь на упор 27, получают сложное движение в плоскости х-у (фиг.10) по окружности, совершая движение “вниз-вперед-вверх-назад-вниз”, что обеспечивает значительное снижение тягового сопротивления рабочих органов и облегчает условия среза сорной растительности.
Сообщение колебательных движений ножам 11 и вращения дискам-очистителям от двигателя происходит через горизонтальный нижний вал 28, на концах которого расположены эксцентрики или кулачки 24 и диски-очистители 20. Горизонтальный вал 28 получает вращение от вертикального вала-оси 7 через угловой редуктор В1 (фиг.11 и 12). В варианте исполнения (фиг.11 и 12) представлен верхний горизонтальный вал 29 привода вращения валов-осей 7. Передний и задний валы-оси 7 получают вращательное движение через верхний горизонтальный вал 29 и верхние редукторы В (фиг.11 и 12). Вариант технического исполнения редуктора В и В1 - на фиг.13. Верхний горизонтальный вал 29 получает вращение от двигателя орудия.
Таким образом, в сравнении с прототипом предлагаемое почвообрабатывающее орудие обеспечивает следующие преимущества:
- значительное снижение усилий оператора и трудоемкости при управлении орудием;
- обеспечивает полную свободу маневра в зависимости от требуемых условий обработки;
- снижение нагрузки на двигатель при маневрировании и повышение его надежности за счет снижения давления почвы на рабочие органы и снижения угла их поворота;
- отсутствие проскальзывания движителя по отношению к земле без применения балластных грузов;
- использование ножей с колебательным движением значительно (на 30-35%) снижает тяговое сопротивление рабочих органов;
- орудие может использоваться как для поверхностной обработки почвы, так и для посева, внесения удобрений, подрезки дерна и т. д.
- при дистанционном управлении орудие движется без сопровождения оператора, который находится вне обрабатываемой территории, что исключает утаптывание взрыхленной земли оператором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Полунавесное почвообрабатывающее орудие с управляемым транспортным колесом | 1987 |
|
SU1540681A1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 2006 |
|
RU2329629C1 |
| ТРОСОВЫЙ КУЛЬТИВАТОР ДЛЯ РАЗНОГЛУБИННОЙ ОБРАБОТКИ ПОЧВЫ | 2017 |
|
RU2657463C1 |
| Широкозахватная почвообрабатывающая машина | 1990 |
|
SU1790830A1 |
| РАМА ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 2006 |
|
RU2327328C1 |
| ШИРОКОЗАХВАТНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2012 |
|
RU2511945C1 |
| ШИРОКОЗАХВАТНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2016 |
|
RU2632226C1 |
| Тяговое переносное приспособление для передвижения машин орудий | 1931 |
|
SU35272A1 |
| ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2006 |
|
RU2310305C1 |
| Почвообрабатывающее орудие | 1982 |
|
SU1083931A1 |
Изобретение относится к малогабаритной почвообрабатывающей технике и может использоваться для междурядий обработки сельскохозяйственных культур или почвы в садах, на приусадебных участках, в теплицах. Ручное орудие, включает тележку, на раме которой установлен двигатель, рабочий орган и рычаги управления. На раме впереди и сзади тележки по оси симметрии расположены вертикальные оси-валы. На валах смонтированы вертикальные рамы с возможностью поворота в горизонтальной плоскости. Рабочие органы состоят из горизонтальной подрезающей рабочей части и боковых вертикально разрезающих почву ножей. Рабочие органы закреплены на рамах, соединенных с рычагами управления и между собой с помощью жестких или гибких тяг. Соединения тяг с рамами имеют разные варианты выполнения. Ножи снабжены дисками-очистителями и устройством для сообщения ножам колебательных движений для снижения тягового сопротивления рабочих органов. Приведена кинематическая схема передачи от двигателя орудия вращательного движения дискам-очистителям и колебательных движений ножам. Такое конструктивное выполнение позволит снизить усилия оператора и повысить маневренность орудия при одновременном снижении нагрузки на двигатель за счет уменьшения угла поворота рабочих органов при обеспечении заданного радиуса поворота орудия. 16 з.п. ф-лы, 13 ил.

| Ручной мотоплуг | 1980 |
|
SU917715A1 |
| SU 1389598 A1, 23.04.1988 | |||
| Секция сельскохозяйственного орудия | 1989 |
|
SU1674711A1 |
| РУЧНОЙ КУЛЬТИВАТОР | 1993 |
|
RU2041579C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1991 |
|
RU2033936C1 |

