ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к торсионному управлению распределения крутящего момента, находящее приложение в машиностроении и специально в транспортном машиностроении, а также и везде, где необходимо автоматическое управление крутящего момента к функционально связанным объектам.
ПРЕДШЕСТВУЮЩЕЕ СОСТОЯНИЕ ТЕХНИКИ
Преобладающее количество распределителей крутящего момента для транспортных средств работает при наличии одной непрерывно подключенной приводящей в движение оси. При потере сцепления между дорогой и колесами этой оси распределители включают автоматически непостоянно включенные приводящие в движение оси. Обычно подключения осуществляются при помощи масляного многодискового сцепления. Включение/выключение соединителей чаще всего осуществляется гидравлическими или электромагнитными включающими (исполнительными) устройствами с внешне поданной энергией, а команды вырабатываются электронной управляющей аппаратурой. Распределение двигательного крутящего момента к движущие колеса управляется и путем воздействия на механизмы и системы транспортного средства, которые имеют функциональную связь при взаимодействии колеса - дорога.
Эффективность управления зависит в наивысшей степени от быстродействия системы. Для достижения высокой надежности и экономичности движения необходимо и тщательное дозирование управляющих воздействий. Тщательность дозирования сильно зависит от точности отсчитывания потерь сцепления. Значимым является и количество параметров движения, которые отсчитываются при данном управлении (скорость, двигательный режим, поворот, ускорения).
При электронном управлении потери сцепления обычно регистрируются непрямо сенсорами ABS посредством регистрирования скольжения двигающих колес. Не хватает оценки величин сцепления. Регистрирование осуществляется при уже проявляющихся потерей энергии и вредных для стабильности движения последствиях. Регистрация величин сцепления подменена регистрацией последствий от его потери. Таким образом, замедляется старт управляющих команд распределения. При регистрации потерь от сцепления при помощи сенсоров для крутящего момента, монтированных после передающего механизма, замедление старта указанного вида отсутствует, но и при этом не хватает достаточно точной количественной оценки потерь (JP 63013824).
Управляющее воздействие как результат от управляющей команды наступает при приводе в действие (при изменении рабочего состояния) выполняющего устройства. Управляющие воздействия замедляются дополнительно с течением времени, которое необходимо для привода в действие выполняющих устройств после поданных управляющих команд к ним.
Управленческий процесс распределения в распределителях крутящего момента электронным управлением содержит в себе фазы: регистрация потерь сцепления, произведение и задавание управляющих команд к выполняющим устройствам, приведение в действие выполняющих устройств.
При управлении с помощью сенсоров существует прямая зависимость между степенью удовлетворения требований к распределению и степени конструктивных усложнений, которые его сопровождают.
Основным недостатком всех электронных управляемых распределителей крутящего момента является замедление управляющих воздействий по отношению моментов возникновения возбуждающих их причин. Причина данного недостатка - это непрямое регистрирование потерь сцепления, как и связанное с этим обстоятельство разделения и последовательного протекания фаз управляющего процесса распределения.
ТЕХНИЧЕСКАЯ СУЩНОСТЬ
Задачей изобретения является создание торсионного управления для распределения крутящего момента, при котором изменения сцепления между дорогой и колесами непрерывно включенных приводящих в движение осей регистрируются директно с помощью устройств, оснащенных чувствительными к скручивающим нагрузкам эластичными элементами, а механические перемещения в этих устройств переобразовываются в физически управляющие воздействия, которые могут прикладываться дозированно.
Задача решается при помощи торсионного управления для распределения крутящего момента, которое включает приводные валы и их приводящие в движение компоненты, дифференциальные и блокировочные механизмы непрерывно и непостоянно задвиживаемых осей, соединители и их включающие устройства, обслуживающие непостоянно задвиживаемые оси, а также и исполнительные устройства для управления работы механизмов и систем из объекта приложения изобретения, которые функционально связаны с взаимодействием колеса - дорога.
В вал, который механически связан с непрерывно приводимой в движение осью, интегрировано хотя бы одно звено для формирования относительной подвижности, которое при помощи своих чувствительных к скручивающих нагрузок эластических элементов выделяют по длине вала не менее чем две относительно подвижные части. Посредством этих частей образуется узел для преобразования относительной подвижности в физические управляющие воздействия.
Узел для преобразования относительной подвижности в физически управляющие воздействия содержит полую ротационную деталь, которая закреплена к одной относительно подвижной части звена для формирования относительной подвижности и расположена коаксиально по отношению к другой. В ротационной детали вырезаны кулачковые профили. Эти профили находятся во взаимодействии с округлыми краями стебел, выходящим из диска, нанизанного на вал шлицевой связью. Посредством второй скользящей кинематической единицы диск связывается и к одному концу управляющего рычага, подвешенного в своей средней части на неподвижную по отношению к шасси ось колебания. Противоположный по отношению к диску конец рычага связан к исполнительным устройствам для управления работы механизмов и систем объекта приложения, которые функционально связаны с взаимодействием колеса - дорога.
Управляющий рычаг связан приводом к включающему устройству не менее чем одного соединителя непостоянно включенной оси, а по протяжению привода смонтировано устройство для дозирования физически управляющих воздействий.
Управляющий рычаг связан приводом с управляющим органом системы торможения, а по протяжению привода смонтировано устройство для дозирования воздействий торможения.
Изобретение обеспечивает управляющие воздействия на исполнительные органы, осуществляющие управление распределения двигательного крутящего момента, которые воздействия проявляются с момента возникновения возбуждающих их причин. Улучшенная таким образом эффективность управления обеспечивает повышение безопасности движения транспортных средств при плохих и резко изменяющихся условиях дороги и улучшение их экономичности по отношению расхода горючего. Изобретение дает простые технические средства для получения и приложения торсионных реакций при скручивающих нагрузках валов. Эти реакции содержат торсионную информацию, которая отражает точно, прямо и неперерывно стоимости сцепления и осуществленной трансмиссией полезной работы в рисковом по отношению безопасности движения интервале данной величины.
ОПИСАНИЕ ПРИЛОЖЕННЫХ ФИГУР
Примерное осуществление торсионного управления распределения крутящего момента указано на приложенных фигурах, где:
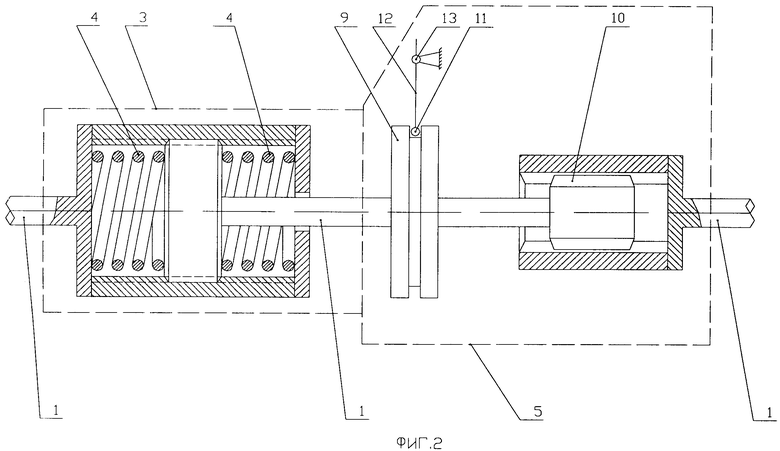
Фигура 1 представляет схему механического осуществления торсионного управления распределения крутящего момента.
Фигура 2 представляет вариант кинематической структуры звена для формирования относительной подвижности.
ПРИМЕРНОЕ ВЫПОЛНЕНИЕ ИЗОБРЕТЕНИЯ
В вал 1, механически связанный с непрерывно приводимой в движение осью 2, интегрировано хотя бы одно звено для формирования относительной подвижности 3, которое при помощи своих чувствительных к закручивающим нагрузкам эластических элементов 4 выделяет по длине вала 1 не менее чем две относительно подвижные части. Посредством этих частей обосабливается узел для преобразования относительной подвижности в физически управляющие воздействия 5.
Узел для преобразования относительной подвижности в физически управляющие воздействия 5 содержит полую ротационную деталь 6, закрепленную к одной относительно подвижной части звена 3 и размещенной коаксиально по отношению к другой. В ротационной детали 6 вырезаны кулачковые профили 7. Эти профили находятся во взаимодействии с округлыми концами стебля 8, выходящими из диска 9, нанизанного на вал 1 посредством шлицевой связи 10. Второй скользящей кинематической единицей 11 диск 9 связывается и к одному концу управляющего рычага 12, подвешенного в средней своей части на неподвижную по отношению к шасси ось качания 13. Противоположный по отношению диска 9 конец рычага 12 связан к исполнительным устройствам для управления работой механизмов и систем из объекта приложения, которые функционально связаны с взаимодействием колеса -дорога.
Управляющий рычаг 12 связан посредством привода 14 с включающим устройством 15 хотя бы одного соединителя 16, обслуживающего непостоянно включенную ось 17, а по протяжению привода 14 смонтировано устройство для дозирования физически управляющих воздействий 18.
Управляющий рычаг 12 связан приводом 19 к управляющему органу 20 системы торможения, а по протяжению привода смонтировано устройство для дозирования воздействия торможения 21.
На фиг.2 показана схема, в которой осуществлена аксиально-угловая реакция. Относительная подвижность части вала 1, на котором закреплен диск 9, обеспечивается винтовой и шлицевой связями в двух концах этой части. Деталь, обладающая относительной подвижностью, через которую обособлен узел 5, в данном случае является диск 9. Эластичные элементы 4 - винтовые пружины, каждая из которых оказывает аксиальное сопротивление в определенном направлении вращения. Если периферию диска 9 выработать кулачковым профилем, развитом по длине вала, так чтобы рычаг 12 следовал профиль кулачка (посредством скользящих связей с кулачком и в шасси), получается разновидность модели, при которой осуществлена радиальная торсионная реакция (с угловой и аксиальной компонентами),
ПРИМЕНЕНИЕ ИЗОБРЕТЕНИЯ
Звено для формирования относительной подвижности 3 в зависимости от потребностей конкретных приложений может быть осуществлено для формирования различных по виду механических или другого типа физических проявлений скручивания, например флюидные или электрические. Эти возможности проистекают от обеспеченной механически относительной подвижности между деталями вала 1, как и между деталями, смонтированными к нему и самому валу.
Выполнение узла 5 полностью зависит от вида выбранного физического проявления скручивания. То же самое относится и к выбору вида приводов (механические, гидравлические или электрические), от которых зависит вид устройства для дозирования управляющих воздействий 18 и 21. Звено 3 может быть расположено на приводящие в движение валы, на полувалы и на вал перед приводным механизмом.
Фигура 1 иллюстрирует вариант чистого механического осуществления изобретения при помощи монтажа звена 3 на приводящий в движение вал 1 после передающего механизма. Приводящий в движение компонент вала 1 (позицированный после не показанного на фигурах приводного механизма) в примере представлен с фигурой 1 зубчатой передачей 24. Механическое угловое относительное перемещение двух частей вала 1 в результате скручивающих (торсионных) нагрузок в действительности является торсионной реакцией вала, которая формируется при помощи звена 3.
Узел 5 в иллюстрированном варианте содержит ротационную деталь 6 с кулачковыми профилями 7, стеблями 8, диском 9 и рычагом 12. Постоянно прижатые к профилю 7 стебли 8 перемещают диск 9 вместе с рычагом 12, следуя профили по ходу изменений в нагрузке. Противоположный по отношению к диску 9 конец рычага 12 осуществляет управляющее физическое воздействие на управляемые объекты посредством приводов 14 и 19 и устройства для дозирования управляющих воздействий 18 и 21. В рассматриваемом случае физическое воздействие является механическим, приводы - веревочными, а устройства 18 и 21 обозначены условно - только с их функцией, которая для веревочных приводов сводится до механического перемещения роликов 22 и 23.
В случаях, при которых полувалы из непостоянно включенной приводящей в движение оси 17 активируются посредством отдельных соединителей 16, становится возможным осуществление распределения крутящего момента и между колесами этой оси.
Когда на звено 3 нет приложенного крутящего момента, положение роликов 22 и 23 определяет три вида состояния приводов. Состояние, при котором ролик только придерживает привод в натянутом положении, определяется как «нулевая натянутость» привода. В этом состоянии ролик не упражняет корригирующего влияния на управляющие воздействия. Когда ролик натянет привод, так чтобы зацепить (частично или вполне) соединитель 16 или тормоз 20, состояние определяется как «положительная натянутость». Через положительную натянутость привода 14 осуществляется какая-то степь включения соединителя 16, которым задаются различные соотношения разделения двигательного крутящего момента между приводящими в движение осями. В случаях, когда ролик расслабляет привод, состояние определятся как «отрицательная натянутость». В зависимости от степени расслабления управляющее воздействие может быть или замедленным и расслабленным, или прерванным.
Задавание определенного соотношения разделения двигательного крутящего момента между приводящими в движение осями через устройство 18, по существу, представляет задавание определенной стратегии торсионного распределения (управления) крутящего момента. Выбор стратегии управления, которая для конкретного вида транспортного средства была бы адекватной конкретным дорожным условиям, функционированию ABS-a (и других систем безопасности) или выбранному водителем стилю управления, сводится к перемещению ролика 22 из устройства 18. Эти перемещения ролика соизмеримы с ходом соединителя.
При кулачковых вариантах механических моделей изобретения позиция управляющего рычага 12 находится в зависимости от местоположения стеблей 8 на кулачке 7. Данное местоположение определяется степенью деформации эластичных элементов 4 звена 3 и от направления вращения. Для каждого из двух направлений вращения в диапазоне от нулевой до максимальной деформации эластичных элементов 4 стебли 8 скользят по разным наклонам (половинкам) кулачковых профилей 7, между самой высокой и самой низкой точкой или на соседние наклоны соседних кулачков - между самой низкой и самой высокой точкой.
Нагрузка на вал 1 с двигательным крутящимся моментом деформирует эластичные элементы 4 только при наличии сцепления между колесами постоянно приводимой в движение оси и дорогой. При нулевой натянутости привода 14 нулевая деформация эластичных элементов соответствует вполне отцепленному соединителю 16 (вполне включена вторая движущая ось 17), а максимальная деформация - вполне отцепленному соединителю (полностью выключенная вторая движущая ось). Эластическая характеристика эластичных элементов (характеристика звена 3) выбирается так, чтобы их максимальная деформация (и полное выключение второй двигающей оси) наступали при достаточно высоких для безопасности движения величин сцепления между колесами постоянно движущейся оси 2 и дорогой. При движении только с постоянно приводимой в движение осью каждое уменьшение сцепления ниже заданных характеристикой величин приведет к незамедлительному (и пропорциональному уменьшению) включению второй приводящей в движение оси 17. При нулевой натянутости включения проявятся и при каждом уменьшении двигательного воздействия (при уменьшении подачи горючего) ниже величин, при которых эластичные элементы 4 деформируются максимально на дороге с хорошим сцеплением.
При одновременной передаче двигательного момента к двум осям и при состоянии нулевой или положительной натянутости привода 14 различия в пройденном колесами расстоянии в результате неровностей или поворота будут проявляться как нагрузка в цепи дорога - колеса - валы - эластичные элементы - осевой соединитель - валы - колеса - дорога. Компенсирование различий и гашение нагрузки происходит у самых слабых к данному моменту связей этой цепи. Когда работа второй оси обусловлена уменьшением сцепления, эти нагрузки пренебрежимо малы. Подобные нагрузки при дороге с хорошим сцеплением могут быть избегнуты путем задания слегка отрицательной натянутости привода 14 при помощи устройства 18.
Устройство 18 может быть произведено в большом количестве вариантов устройства - от механического с ручным управлением до вполне автоматического мехатронного устройства. Механизированные, автоматизированные и автоматические варианты нуждаются во внешне поданной энергии для осуществления перемещений. Автоматизированные и автоматические варианты нуждаются и в информации о разных количествах параметров движения, а так же и в ее обработке. Технические средства для данной обработки варьируют в диапазоне от логических элементов до компьютеризированных. При автоматических вариантах устройство 18 могло бы, например, задавать слегка отрицательную натянутость при каждом более осязаемом уменьшении приложения двигательного крутящего момента.
Привод 19 и устройство 21 осуществляют помощь при начале движения и при спуске по наклону, как и при использовании автоматических тормозов для стоянки. Для выполнения данных функций необходимо при нулевой скорости движения и нажатой тормозной педали 20 через устройство 21 задать (вручную или автоматически) нулевую или слегка положительную натянутость нормально расслабенного привода 19. Таким образом, тормоз остается включенным и после освобождения тормозной педали 20, действует на все колеса и освобождается автоматически только при наличии двигательного крутящего момента на вал 1. При достижении определенной скорости (например, 5 км/ч) привод 19 необходимо расслабить. Если после сдвига с места действие устройства 21 не будет прекращено, тормоза начнут действовать при уменьшения подачи горючего. Прекращение действия устройства 21 может быть осуществлено вручную или автоматично.
В зависимости от выбранной кинематической структуры конфигурации эластичного соединителя от звена 3 могут быть формированы как угловые, так и аксиальные и радиальные механичные реакции скручивания (торсионные реакции).
В упрощенных вариантах аксиально перемещающиеся части вала (или смонтированные на нем) могут связаться прямо с включающими устройствами соединителей, блокировками дифференциалов или других средств управления.
Механические управляющие воздействия в варианте, представленном на фиг.1, могут стать флюидными (например, гидравлическими), если части объемов резиновых эластических элементов пополнить флюидом и связать через каналы через вал, при гидравлическом включении устройства соединителя. Подобным методом приводы 14 и 19 могут стать гидравлическими, а механическое управляющее воздействие - гидравлическим, если конец рычага 12 связать с устройством для производства гидравлического давления. Это приведет к изменениям устройств 18 и 21. Если звено 3 или рычаг 12 управляют электрическими контактами, можно осуществить электрический привод. При помощи магнитных или фотосенсоров, которые регистрируют механические относительные перемещения, формированные звеном 3, можно осуществить торсионное электронное управление без механического узла преобразования 5. Преимущество данного вида электронного управления - это точность и прямое отсчитывание скручивания как механический эквивалент сцепления и мера для осуществленной полезной работы к моменту отсчитывания.
Торсионные реакции при скручивающих нагрузках валов могут быть применены в качестве торсионной информации о величинах сцепления (о состоянии дороги) и для осуществляемой трансмиссией полезной работы в каждый момент во время движения. Это легко осуществимо и целесообразно для управления всеми механизмами и системами объекта приложения изобретения, работа которых связана с взаимодействием колеса - дорога. Примером для таково приложения может быть управление блокирующего механизма к дифференциалу постоянно включенной приводящей в движение оси. На фиг.1 эти возможности отмечены пунктирными линиями. Объектами приложения торсионной информации при помощи технических средств изобретения могут быть двигатель, передающий механизм, тормозная система и др.
Кроме своего высокого информационного потенциала торсионные реакции содержат и легко применяемый энергетический потенциал для незамедлительного приложения (преобразования) торсионной информации в физически управляющее воздействие.
Технические средства для получения и приложения торсионной информации, которые являются предметом изобретения, могут быть использованы для упрощения работы и повышения эффективности программ для безопасности и стабилизации транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСОВЕРШЕНСТВОВАНИЯ В ПОЗИЦИОННЫХ СЕРВОСИСТЕМАХ ИЛИ ОТНОСЯЩИЕСЯ К ТАКИМ СИСТЕМАМ | 1995 |
|
RU2149787C1 |
| РОЛИКОВЫЕ КОНЬКИ (ВАРИАНТЫ) | 2005 |
|
RU2295992C2 |
| УКЛАДЧИК ДОРОЖНО-СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1993 |
|
RU2076167C1 |
| Трансмиссионное устройство мотоблока повышенной маневренности | 2023 |
|
RU2814598C1 |
| Устройство силовой передачи мотоблока | 2023 |
|
RU2821955C1 |
| Силовая передача мотоблока | 2023 |
|
RU2814597C1 |
| Трансмиссия мотокультиватора | 2023 |
|
RU2814599C1 |
| Трансмиссия мотоблока | 2023 |
|
RU2814600C1 |
| Силовая передача мотокультиватора | 2023 |
|
RU2814605C1 |
| Трансмиссия мотоблока | 2023 |
|
RU2821899C1 |
Изобретение относится к устройству для управления распределением крутящего момента в транспортных средствах. В вал (1), механически связанный с осью (2), интегрированы эластичные элементы (4), чувствительные к закручивающим нагрузкам, образующие звено (3), которые делят вал (1) на две относительно подвижные части. Эти элементы образуют узел для преобразования относительной подвижности в физически управляющие воздействия (5). Узел для преобразования относительной подвижности в физически управляющие воздействия (5) содержит полую ротационную деталь (6), закрепленную к одной подвижной части звена (3) и размещенной коаксиально по отношению к другой. В ротационной детали (6) вырезаны кулачковые профили (7). Эти профили находятся во взаимодействии с округлыми концами стеблей (8), выходящими из диска (9), установленного на вал (1). Также диск (9) связан с управляющим рычагом (12), подвешенным в средней своей части на ось качания (13). Противоположный по отношению диска (9) конец рычага (12) связан с исполнительным устройством. Управляющий рычаг (12) связан посредством привода (14) с включающим устройством (15) соединителя (16), для соединения с непостоянно включенной осью (17). Управляющий рычаг (12) связан также приводом (19) с управляющим органом (20) системы торможения. Достигается повышение безопасности движения транспортных средств. 3 з.п. ф-лы, 2 ил.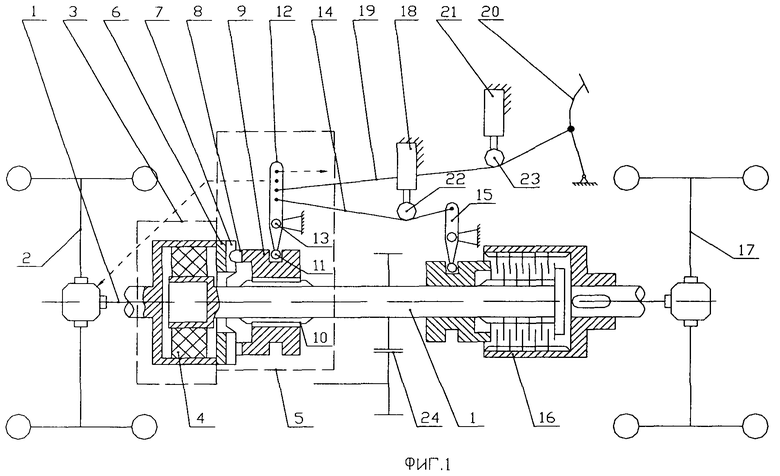
1. Торсионное устройство для управления распределением крутящего момента, включающее приводящие в движение валы и их приводящие в движение компоненты, дифференциалы и блокировочные механизмы непрерывно и непостоянно приводимых в движение осей, соединители с их включающими устройствами, обслуживающими непостоянно приводимые в движение оси, а также и исполнительные устройства для управления работой механизмов и систем объекта приложения, которые функционально связаны с взаимодействием колеса - дорога, характеризирующееся тем, что на валу (1), который механически связан с непрерывно приводимой в движение осью (2), интегрировано хотя бы одно звено для формирования относительной подвижности (3), которое при помощи своих чувствительных к крутящим нагрузкам эластичных элементов (4) выделяет по длине вала (1) не менее двух относительно подвижных частей, которыми обособляется узел для преобразования относительной подвижности в физические управляющие воздействия (5).
2. Торсионное устройство по п.1, отличающееся тем, что узел для преобразования относительной подвижности в физические управляющие воздействия (5) содержит полую ротационную деталь (6), которая закреплена к одной относительно подвижной части звена (3) и расположена коаксиально по отношению к другой так, чтобы вырезанные в ротационной детали (6) кулачковые профили (7) были во взаимодействии с округленными концами стебля (8), выходящего из диска (9), нанизанного на вал (1) шлицевой связи (10), через вторую скользящую кинематическую единицу (11) связывается с одним концом управляющего рычага (12), который подвешен в своей средней части на неподвижную по отношению к шасси ось колебания (13), а противоположный к диску (9) конец управляющего рычага (12) связан с исполнительным устройством для управления работой механизмов и систем объекта приложения, которые функционально связаны с взаимодействием колеса - дорога.
3. Торсионное устройство по п.1 или 2, отличающееся тем, что управляющий рычаг (12) связан посредством привода (14) с включающим устройством (15) не менее чем одного соединителя (16) на непостоянно включенной оси (17), а по протяжению привода (14) смонтировано устройство для дозирования физически управляющих воздействий (18).
4. Торсионное устройство по п.1 или 2, отличающееся тем, что управляющий рычаг (12) связан посредством привода (19) с управляющим органом (20) системы торможения, а по протяжению привода смонтировано устройство для дозирования тормозного воздействия (21).
| JP 2003267076 A, 25.09.2003 | |||
| Пресс для изготовления изоляционных плит из торфа | 1934 |
|
SU42797A1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ НА ПОЛНОПРИВОДНОМ ШАССИ | 2001 |
|
RU2226159C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ МЕЖОСЕВОГО ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2200888C2 |

