Изобретение относится к позиционным сервосистемам, в которых определение разсогласования между требуемыми относительными положениями приводящих в действие (т.е. ведущих) и ведомых элементов вызывает приложение усилия, приводящего к уменьшению такой погрешности. Изобретение применимо в частности, но не исключительно, в системах рулевого управления известного общего вида с вспомогательным усилителем, в которых рулевой механизм - например, реечного или червячного типа - приводится в действие зубчатым колесом или шестерней, обычно находящейся на одном конце вала, на другом конце которого установлено рулевое колесо или другой управляющий элемент. Предусмотрены средства для измерения углового отклонения вала. Когда отклонение превышает заранее определенное значение, что свидетельствует о приложении значительного усилия рулевого управления, задействуется добавочный источник мощности применительно к червяку или зубчатому колесу, чтобы увеличить крутящий момент руля и уменьшить таким образом отклонение вала.
В японской патентной публикации 63291770А предложено ввести "передачу с бесступенчатым регулированием передаточного отношения " (ПБРПО) "эпициклического" типа "с регулируемым передаточным отношением" в системе рулевого управления с вспомогательным усилителем. Обычными составными частями такой ПБРПО являются эпициклический редуктор и изменяющая скорость составная часть или "вариатор", причем последний содержит входной элемент, промежуточный противодействующий элемент и выходной элемент. Под "эпициклическим" типом "с регулируемым передаточным отношением" ПБРПО понимается тип передач, в котором оси вращения всех трех элементов вариатора концентричны, так что общая конфигурация вариатора имеет некоторое сходство с обычным зубчатым эпициклическим или планетарным редуктором. Настоящее изобретение принципиально отличается от конкретного варианта по JP-A-63291770 тем, что в системе, описанной в этой публикации, ПБРПО не генерирует и не передает никакую мощность, чтобы способствовать усилию рулевого управления, прикладываемому оператором. Вместо этого, функция ПБРПО состоит в том, чтобы изменять передаточное отношение ручного рулевого управления между рулем и рейкой рулевого механизма, с которой он соединен, так что совершенно разные средства для генерирования вспомогательной мощности принимают относительно сильные сигналы при низких скоростях транспортного средства и слабые сигналы при высоких скоростях.
Настоящее изобретение также отличается от многих известных автомобильных ПБРПО концентрической компоновки (пример одной из которых приведен в US-A-4922788) тем, что в этих ПБРПО единственным источником движущего входного сигнала является первичный двигатель автомобиля. В позиционных сервосистемах, к которым относится настоящее изобретение, должны быть два отдельных источника таких входных сигналов. Например, в системе рулевого управления с усилителем первый, ручной входной сигнал прикладывают посредством рулевого колеса, а ПБРПО приводит в действие второй источник движущей мощности, чтобы внести требуемую вспомогательную мощность.
Далее изобретение раскрыто со ссылками на прилагаемые чертежи, на которых:
фиг. 1 - схема системы рулевого управления с вспомогательным усилителем,
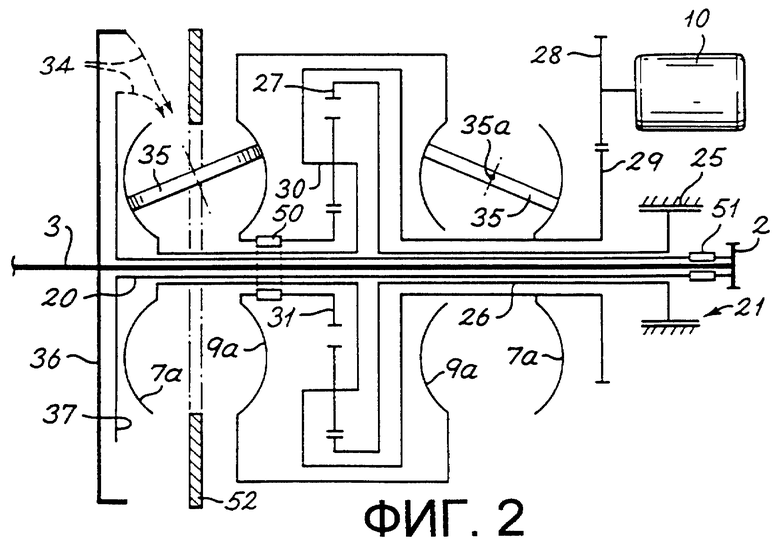
фиг. 2 - разрез в плоскости вала 3,
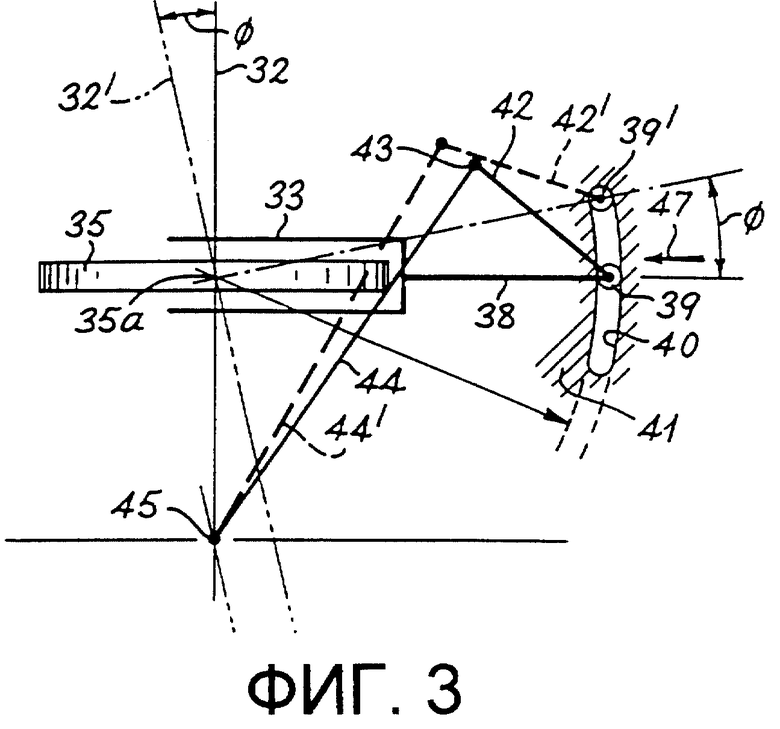
фиг. 3 - связи и движения роликов вариатора, на примере одного из роликов,
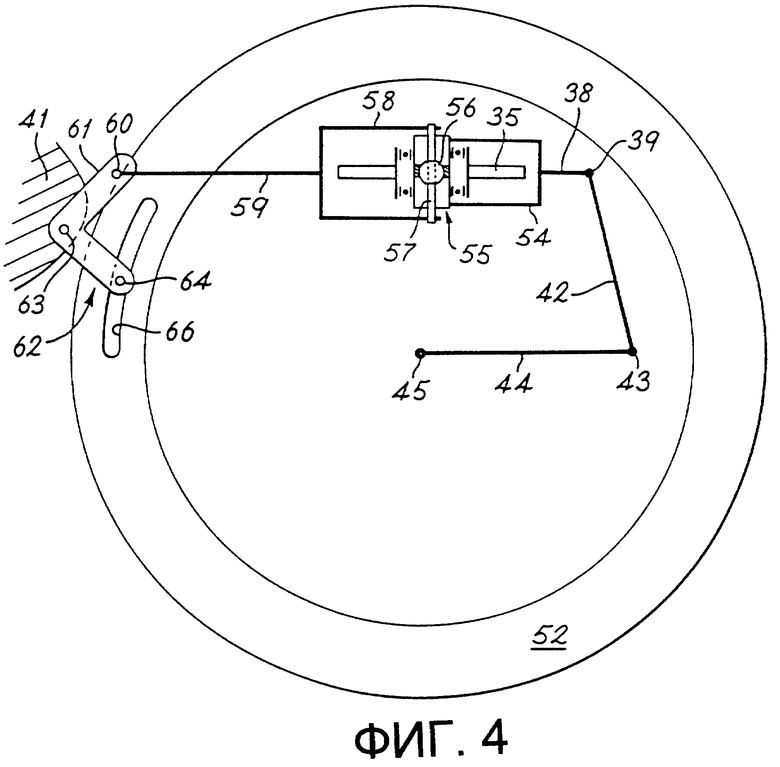
фиг. 4 - альтернативный вариант компоновки, представленной на фиг. 3.
На фиг. 1 показано, что выход электродвигателя 10 с постоянной скоростью вращения соединен с "входным" элементом 7 вариатора эпициклического типа с регулируемым передаточным отношением и (в точке 11) с одной составной частью обычного эпициклического редуктора 6 из трех частей. Другие две составные части редуктора 6 соединены с "выходным" элементом 9 вариатора и с ограничивающим крутящий момент устройством 21 соответственно. Третий, промежуточный элемент 8 вариатора вырабатывает выходной сигнал 13, который представляет собой один входной сигнал для шестерни 2, приводящей в действие рейку 4 рулевого механизма, а другой входной сигнал подается от рулевого колеса 1 посредством вала 3. Части, которые составляют ПБРПО, представлены внутри пунктирной линии 5 и содержат редуктор 6 и вариатор (7, 8 и 9), эти части установлены с возможностью вращения как единого узла с трубкой 20, которая соосна с валом 3 и посредством которой они соединены с шестерней 2. Вал 3 и трубка 20 таким образом составляют пару концентрических, входных элементов, вращательно воздействующих на шестерню 2. Поскольку ограничивающее крутящий момент устройство 21 само не нуждается во вращении, оно может, например, быть выполнено в простом и надежном виде стационарного тормоза.
На фиг. 2 представлены некоторые дополнительные детали варианта, представленного на фиг. 1, причем вариатор относится к типу с тороидальными канавками и передаваемым посредством качения усилием сцепления, и показано, в частности, как скомпонована ПБРПО для вращения соосно с валом 3 рулевого механизма. Стационарный противодействующий элемент 25 сцеплен посредством ограничивающего крутящий момент устройства 21 типа тормоза с гильзой 26, несущей кольцевое зубчатое колесо 27 редуктора 6. Двигатель 10 сцеплен посредством зубчатых колес 28 и 29 как с торцевыми дисками, например входным диском 7 вариатора с тороидальными канавками, так и с планетарным водилом 30 редуктора 6. Выходные диски 9 вариатора установлены совместно с центральным зубчатым колесом 31 эпициклического редуктора. Сдвоенные планетарные зубчатые колеса поддерживаются водилом 30, чтобы реверсировать направления вращения дисков 7, 9, как это требуется в вариаторе с тороидальными канавками, а передаточные отношения редуктора предпочтительно выбраны так, чтобы придать дискам равные скорости вращения в противоположных направлениях. "Промежуточный элемент" 8 вариатора в этом конкретном варианте осуществления содержит два комплекта передающих тяговое усилие роликов и связанные с ними несущие узлы, причем один такой комплект расположен между одной парой дисков 7, 9, а второй комплект - между другой парой. Один из таких роликов каждого комплекта указан с помощью выносной линии позицией 35. Как правило, в каждом комплекте используют три таких ролика, расположенных через равные угловые интервалы вокруг оси вала 3.
Позиция 34 на фиг. 2 показывает, как управление системой должно связывать вал 3 рулевого механизма, промежуточный элемент 8 вариатора и трубочное соединение 20 с шестерней 2. На фиг. 2 показаны фланцы 36 и 37 соответственно вала 3 и трубки 20, а на фиг. 3 кинематически представлены принципы соединения фланца 36 с роликами 35, вызывающего изменение передаточного отношения роликов, когда отклонение вала 3 превышает заданное угловое отклонение (т.е. когда угловые положения вала 3 и трубки 20 отличаются более чем на заданную величину), и последующее приложение воздействия крутящего момента, испытываемого роликами, к шестерне 2 посредством трубки 20, обеспечивающее усиление рулевого воздействия путем увеличения усилия приложенного водителем рулевому колесу 1, и приводящее к уменьшению рассогласования до нуля.
Следует также отметить три дополнительных признака, представленных на фиг. 2. Во-первых, центробежное сцепление или эквивалентное защитное устройство 50, расположенное между центральным зубчатым колесом 31 и выходными дисками 9 и задействуемое, чтобы гарантировать, что центральное зубчатое колесо отсоединяется от дисков и поэтому разрывается цепь усиления рулевого управления, в случае прекращения вращения центрального зубчатого колеса 30 при, например, отказе двигателя. Если это происходит, оператор продолжает управление рулевым колесом 1, а отключенный усилитель рулевого механизма не создает помех управлению. Во-вторых, соответствующее соединение 51 для однонаправленного гашения движения расположено между шестерней 2 и фланцем 37 реактивной пластиной 41. Этим обеспечивается работа механизма рулевого усилителя на увеличение усилия рулевого управления, когда оператор поворачивает рулевое колесо 1 с намерением переместить рейку 4, и поворот шестерней 2 рулевого колеса 1, когда приемлемо приложение усилия управления в направлении реверса. Этот эффект реверса возникает, например, от колесных шин, при выходе транспортного средства из поворота, когда без одностороннего воздействия устройства 51 механизм рулевого усилителя мог бы оказать сопротивление восстановлению рулевого колеса 1 в положение для движения прямо. Таким образом, эффект работы устройства 51 состоит в том, что при отпускании водителем рулевого колеса 1 положение, которое займет рулевое колесо, будет определяться колесами. Третьим дополнительным признаком является наличие кольца 52, расположенного смежно с одним из комплектов роликов 35 и номинально соосное с валом 3, но имеющего центральное отверстие 53, достаточно большое, чтобы позволить кольцу несколько сдвигаться от центра без помех роликами. Функция этого кольца будет пояснена на примере конкретного варианта осуществления, представленного на фиг. 4.
На фиг. 3 представлен один из роликов 35, установленный с возможностью вращения вокруг оси 32 в опоре 33, соединенной со стержнем 38, имеющим шаровой конец 39, установленный с возможностью скольжения в дугообразном пазу 40, выполненном в реактивной пластине 41. Как известно в технике, центр 35а ролика 35 должен лежать на фиксированной "центральной окружности" тора, которой соответствуют диски 7, 9. Дуга паза 40 имеет тот же центр 35а. Шаровой конец 39 шарнирно прикреплен к звену 42, которое, в свою очередь, шарнирно прикреплено в точке 43 к одному концу звена 44, другой конец которого шарнирно прикреплен к фланцу 36 и должен рассматриваться как вращающийся в плоскости, перпендикулярной к плоскости чертежа на фиг. 2, но параллельной плоскости чертежа на фиг. 3, учитывая то, что точка 45 совпадает с осью вала 3. Реактивная пластина 41 прикреплена к лицевой поверхности фланца 37 и расположена параллельно ей, так что пластина и фланец перемешаются совместно. Когда ролик 35 находится в положении, в котором он показан на фиг.3, ось 32 будет совпадать с общей осью вала 3 и трубки 20. Это соответствует положению равновесия системы, в котором у вала 3 имеется пренебрежимо малое угловое отклонение и в котором передаточные отношения ПБРПО выбраны так, что она находится в так называемом "зубчатом нейтральном" состоянии, в котором шаровые концы 39 расположены в их среднем положении внутри паза 40. Таким образом, на роликах 35 нет нагрузки крутящего момента, и поэтому шаровые концы 39 не оказывают осевого воздействия на реактивную пластину 41 в направлении, указанном стрелкой 47. Поэтому двигатель 10 не прикладывает крутящий момент к шестерне 2 посредством фланца 37 и трубки 20. Если возникает угловое отклонение вала 3, приводящее к соответствующему угловому рассогласованию между валом 3 и трубкой 20, то звенья 42, 44 смещаются в положения, показанные в точках 42' и 44' соответственно, а ролик 35 наклоняется так, что он становится выровнен с шаром, находящимся в другом положении в пазу 40. На фиг. 3 это показано в точке 39', на одном конце диапазона положений шара внутри паза. Ось 32' смещенного ролика теперь не пересекает ось вала 3, являющуюся также осью вариатора. Поэтому ролик 35 испытывает противодействие крутящего момента, которое создает противодействующее усилие (воздействующее в направлении стрелки 47) на пластину 41 (т.е. на фланец 37) и крутящий момент на шестерне 2 посредством трубки 20, который дополняет крутящий момент, приложенный к ней валом 3 рулевого колеса 1. Этот дополнительный крутящий момент затем уменьшается до нуля по мере уменьшения до нуля угла ϕ, и шаровой конец 39 возвращается в свое среднее положение в пазу.
При разработке конкретного варианта осуществления, представленного на фиг. 4, было принято во внимание, что усилия противодействия ролика - см. позицию 47 на фиг. 3 - велики, что создает потенциальные преимущества, например уменьшает заедание и повышает чувствительность управления, при изоляции входных усилий рулевого управления (приложенных к фланцу 36, показанному на фиг. 2) от усилий противодействия роликов, которые составляют выходной сигнал системы рулевого управления с усилителем и приложены к фланцу 37. Еще одним признаком заявленной конструкции является простота механизма, служащего для выравнивания выходных усилий, прикладываемых тремя роликами (35) в каждом комплекте, как показано на фиг. 2. Такое выравнивание происходит естественным образом в современной управляемой крутящим моментом автомобильной ПБРПО (как описано, например, в описании к патенту ЕР-В-0444086), где ролики позиционируют гидравлически. Однако можно ожидать отсутствия точного выравнивания и возможного создания проблем в более простой ПБРПО, которая была бы экономичной для рулевого или другого вспомогательного привода с усилителем и в которой ориентация каждого ролика регулируется непосредственным механическим соединением между этим роликом и рулевым колесом 1.
Первое различие, существующее между конкретными вариантами осуществления, представленными на фиг. 3 и 4, заключается в том, что на последнем чертеже связь (38, 39, 42, 43, 44), соединяющая опору 33 ролика с фланцем 36 (а следовательно, и с валом 3 и рулевым колесом 1), теперь ограничена "входной" стороной системы и не имеет связи с реактивной пластиной 41, а также отсутствует паз 40.
Другое основное различие, относящееся теперь к "выходной" стороне системы, заключается в том, что опора ролика состоит, по существу, из двух частей. Первая часть 54 аналогична позиции 33 на фиг. 3, но содержит в своем центре "розу" или другое шарнирное соединение 55, центральный шар 56 которого имеет стержень 57, соединенный с рамой 58, которая составляет вторую часть опоры. Стержень 59 выступает из рамы 58 аналогично тому, как стержень 38 выступает из рамы 33. Стержень 59 шарнирно соединен в точке 60 с одним плечом 61 изогнутого рычага 62, вершина которого шарнирно установлена в точке 63 на реактивной пластине 41. Другое плечо коленчатого рычага 62 имеет палец 64, который скользит в пазу 66, выполненном в "плавающей" выравнивающей пластине 52, уже описанной со ссылкой на фиг. 2. Как уже было упомянуто, ролик 35, представленный на фиг. 3 и 4, является одним из трех роликов, передающих тяговое усилие через тороидальную полость между входным тороидальным диском 7 и соответствующим выходным диском 9, причем эти три ролика размещены через равные угловые интервалы вокруг оси вала 3. Поэтому номинально пальцы 64 также будут располагаться через равные угловые интервалы на мнимой окружности, соосной со стержнем 3, а пластина 52 также будет соосной. Однако, если приложенные (посредством частей 58 опор и стержней 59 трех роликов) осевые усилия не совсем равны, эффект неравенства проявится в небольшом смещении пальцев 64, и, следовательно, пластины 52 от оси до достижения положения равновесия, в котором относительная угловая установка трех коленчатых рычагов будет такой, что равные усилия поворота будут приложены к реактивной пластине 41 каждым из коленчатых рычагов 62 в соответствующем шарнирном соединении 63. Путем формирования дуг пазов 66 номинально концентричными с валом 3 (т.е. с точкой 45) усилия, которые пальцы 64 прикладывают к пластине 52 для ее перемещения, являются, по существу, только радиальными и не имеют никакой окружной составляющей, которая стремилась бы поворачивать пластину.
Необходимо, в частности, отметить следующие потенциальные преимущества конкретных вариантов осуществления, представленных на всех фигурах чертежей. Во-первых, вращение ПБРПО происходит вместе с элементами, от которых она получает свой входной сигнал и которым она передает свой выходной сигнал, так что не вызывает проблем тот факт, что хотя вал 3 может проворачиваться на три оборота, эффект усиления рулевого управления проявляется, когда имеется лишь малое угловое рассогласование, например, 2o, между валом 3 и трубкой 20. Во-вторых, когда вариатор неподвижен, он находится в состоянии естественного покоя с роликами 35, связанными передаточным отношением 1:1, что исключает таким образом какую-либо тенденцию к управлению рулевым колесом.
Хотя изобретение было проиллюстрировано на чертежах только применительно к системе рулевого управления с вспомогательным усилителем, специалисту в данной области техники очевидно, что ее применение возможно в позиционных сервосистемах вообще, в которых вспомогательное усиление может быть полезно для того, чтобы обеспечить воспроизведение задаваемого вручную или другого маломощного перемещения вращающегося входного элемента концентрическим, но более массивным вращающимся выходным элементом. Такие приложения включают в себя лебедку с усилителем, в которой барабан приводят в действие усилителем, воспроизводящим движение задействуемой вручную рукоятки; поворотный кран и обрабатывающую головку, в котором (которой) усилители большой мощности заставляют, соответственно, кабину или револьверный суппорт следовать движениям вращающихся органов управления, которые приводят в действие либо непосредственно вручную, либо с очень незначительным усилением.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОТБОРА МОЩНОСТИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2411406C2 |
| УСТРОЙСТВО БЕССТУПЕНЧАТОГО РЕГУЛИРОВАНИЯ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ (ВАРИАТОР) | 2005 |
|
RU2382917C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ | 2008 |
|
RU2487284C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ С ВОЗМОЖНОСТЬЮ УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ | 1994 |
|
RU2133895C1 |
| УСТРОЙСТВО, ОГРАНИЧИВАЮЩЕЕ ПЕРЕДАТОЧНОЕ ЧИСЛО | 2006 |
|
RU2391589C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ | 2007 |
|
RU2425268C2 |
| ВАРИАТОР | 2006 |
|
RU2413888C2 |
| СИСТЕМА УПРАВЛЕНИЯ БЕССТУПЕНЧАТО-РЕГУЛИРУЕМОЙ КОРОБКИ ПЕРЕДАЧ | 1997 |
|
RU2178109C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ СИЛОВОЙ ПЕРЕДАЧЕЙ | 2006 |
|
RU2389626C2 |
| ТРАНСМИССИЯ С БЕССТУПЕНЧАТО ИЗМЕНЯЕМЫМ ПЕРЕДАТОЧНЫМ ЧИСЛОМ | 1991 |
|
RU2089769C1 |
Изобретение относится к позиционным сервосистемам, в которых определение рассогласования между требуемыми относительными положениями приводящих в действие, т. е. ведущих, и ведомых элементов вызывает приложение усилия, приводящего к уменьшению такой погрешности. Позиционная сервосистема рассмотрена на примере системы рулевого управления с промежуточным усилителем, в которой передача с бесступенчатым регулированием передаточного отношения (ПБРПО) эпициклического типа с регулируемым передаточным отношением и, в частности, относящаяся к типу с тороидальными канавками и передаваемым посредством качения усилием сцепления. ПБРПО расположена соосно с рулевым колесом или другим вращающимся исполнительным элементом (3) и рулевым или ведомым механизмом и подает выходной сигнал для увеличения рулевого усилия в ответ на рассогласование между положениями исполнительного элемента и рулевого механизма. Описаны средства (51, 52) для предотвращения помех при нормальном ручном соединении между исполнительным элементом и рулевым механизмом, если ПБРПО должна прекратить вращение, и случаи, когда нормальное течение операции реверсируется и рулевой механизм имеет тенденцию к повороту исполнительного элемента. Описаны также средства, в которых ПБРПО относится к типу с тороидальными канавками, для обеспечения равенства между усилиями, прикладываемыми к рулевому механизму всеми его соединениями с ПБРПО. Технический результат заключается в задействовании дополнительного источника мощности при превышении определенного значения отклонения вала для увеличения крутящего момента на руле и снижения значительного усилия, возникающего в рулевом управлении. 17 з.п.ф-лы, 4 ил.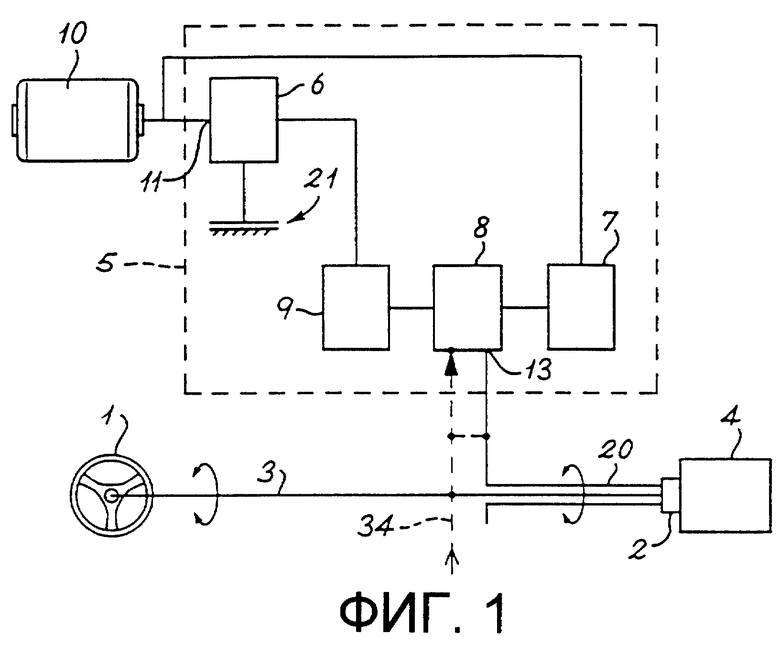
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Способ определения физико-механических характеристик органического стекла | 1971 |
|
SU444086A1 |
| Устройство для вырезания осевой части заклепки | 1948 |
|
SU84724A1 |
| US 4922788 A, 08.05.1990 | |||
| Устройство для гибки петли из проволоки | 1989 |
|
SU1745397A1 |

