Техническое решение относится к конструктивному выполнению средств гидрофизических исследований и может быть использовано, например, при реализации систем акустической томографии или систем пассивного обнаружения шумящих объектов.
При проведении гидроакустического мониторинга широко используются различные средства гидроакустического наблюдения, в том числе автономные буйковые станции.
Автономная буйковая станция (АБС), рассмотренная в работе [1], выбранная в качестве прототипа, использует для сбора данных 8 гирлянд с 8 первичными датчиками соединенных последовательно. АБС предназначена для выполнения долговременного гидрофизического мониторинга с возможностью определения места и оперативной передачи данных для чего используются спутниковая система передачи данных типа «Гонец» и навигации «ГЛОНАСС». Такие буйковые станции могут устанавливаться на тросе с помощью якоря в прибрежных зоне и в открытом океане или дрейфовать в океане. Оснащенные комплексом океанологических приборов АБС регулярно измеряют и передают полученные данные на центр обработки данных (ЦОД) по радиоканалу в том числе по спутниковому каналу связи. Для дрейфующей АБС предусмотрена спутниковая навигационная система.
АБС состоит из герметичного аппаратурного модуля АБС в составе блока управления, источника питания. В наружу вынесены под радиопрозрачным колпаком антенна спутниковой систем связи «Гонец» и навигации «Глонасс» с абонентным пунктом, проблесковый световой маяк и радиоантенна, которые установлены на поплавке изготовленного из синтактического материала. Кабель заведен в аппаратурный модуль с помощью гермоввода, для страховки сигнального кабеля от рывков применяется страховочные фалы, которые крепятся к кабелю с помощью специальных зажимов. За сигнальный кабель последовательно подключаются все восемь элементов «гирлянды» с первичными датчиками.
Основным недостатком прототипа является ограниченная возможность использования АБС в качестве только линейной антенны с количеством от 8 до 64 первичных датчиков (гидрофонов), имеющая направленность только в вертикальной плоскости.
Известны приемные акустические антенны с линейным и цилиндрическим размещением приемных элементов, имеющие раздвижную конструкцию, обеспечивающую малые габариты в транспортном положении и необходимый волновой размер в рабочем положении, например акустические антенны современных зарубежных вертолетных станций FLASH, CORMORANT, HELRAS или отечественной станции «Приемная антенна гидроакустической станции кругового обзора» [2]. Эти станции предназначены для работы в паре с воздушными или надводными судами обеспечения (например, вертолетами).
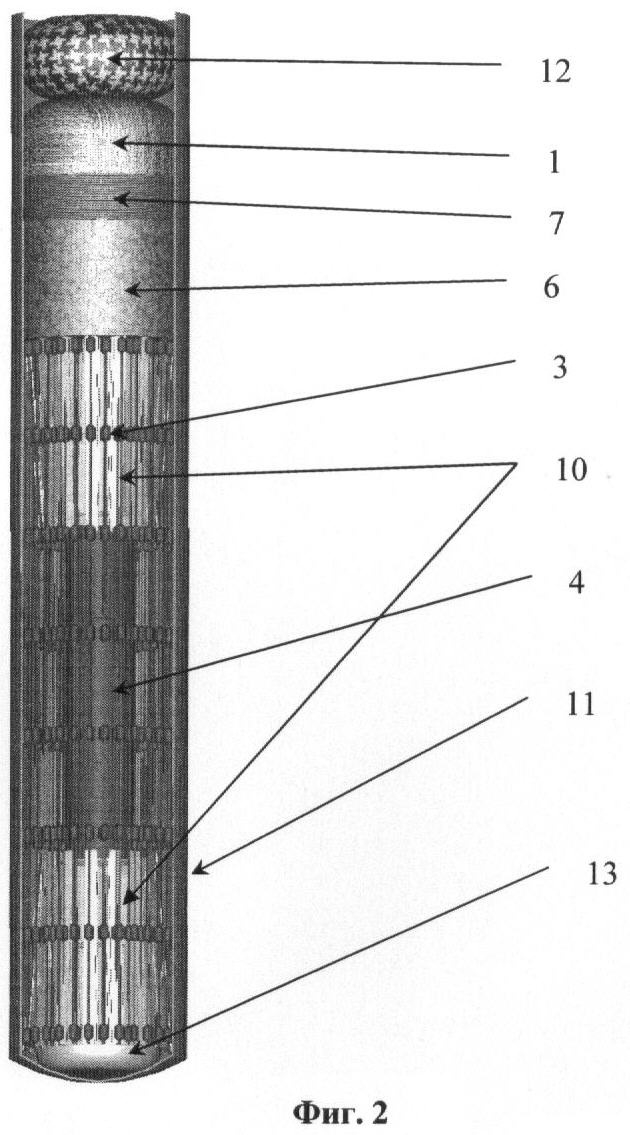
Предлагаемая автономная радиогидроакустическая станция (АРГАС) конструктивно состоит (фиг.1) из малогабаритного гидроакустического антенного комплекса 2 (МГАК) и радиобуя 1 (РБ), соединенных кабель-тросом 7. АРГАС предназначена как для работы в паре с обеспечивающими воздушными и надводными судами, так и в автономном режиме. В транспортном положении РБ 1 и МГАК 2 (фиг.2) помещены в отделяемый при погружении в воду цилиндрический защитный кожух 11. Габаритные размеры АРГАС в транспортном положении: диаметр 150 мм, осевая длинна 900 мм. В отсеке носителя диаметром 324 мм размещается до трех АРГАС.
Конструкция радиобуя 1 надувная, при выдергивании чеки срабатывает клапан баллона со сжатым углекислым газом и происходит наддув гибкой конструкции РБ 1. Во внутреннем объеме РБ размещены: приемопередатчик, источник питания, антенно-фидерное устройство, спутниковые системы связи и навигации, клапан избыточного давления. Выдергивание чеки клапана избыточного давления осуществляется при разъединении защитного кожуха 11. При постановке с воздушного судна при выходе защитного кожуха АРГАС из отсека носителя происходит раскрытие парашютной системы 12 и наполнение углекислым газом гибкой конструкции РБ 1. Вместе с защитным кожухом 11 от АРГАС разъединяется также парашютная система 12 связанная с кожухом посредством стропов парашюта.
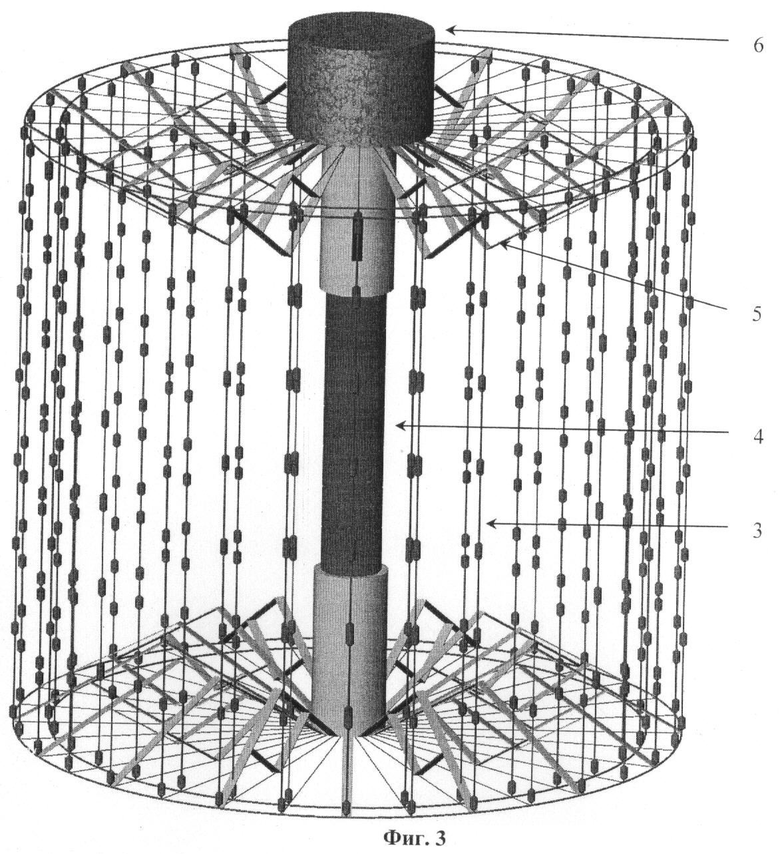
Механизм раскрытия (10 в транспортировочном, 5 в рабочем положениях) приемно-излучающей антенны построен на использовании плоских пружин. Механизм действует следующим образом, защитный кожух, крепится к корпусу МГАК 2 при помощи замков, замки удерживаются в замкнутом состоянии проволокой из нихрома. После погружения АРГАС в воду приводится в действие механизм развертывания МГАК 2. На защитный кожух 11 подается напряжение относительно корпуса МГАК 2, начинает идти электрохимическая реакция между проволокой удерживающей замки и корпусом, проволока обрывается, защитный кожух 11 разъединяется вследствие разрушения гидростата 13, под воздействием гидростатического давления соответствующей глубине погружения МГАК 30-50 метров высвобождая, гидроакустические преобразователи.
Приемная антенна МГАК 2 представляет собой две звукопрозрачные антенные решетки цилиндрической формы, причем антенная с малой формой вложена в антенну большой формы. В развернутом положении диаметр внешнего цилиндра (большая форма) 670 мм, диаметр внутреннего (малая форма) меньше на 0,5 длины волны, высота антенны 605 мм. В каждом цилиндре по 32 вертикальных элемента, каждый элемент представляет собой единую, жесткую конструкцию линейной антенны 3 из 8 гидрофонов.
Излучающая антенна 4 выполняется в виде цилиндра, в составе которого 8 цилиндрических гидроакустических излучателя. Диаметр цилиндра 80 мм, высота - 290 мм.
Модуль обработки и управления (МОУ) 6 включает в себя тракт приема, оцифровки и обработки г/а информации, формирование и усиление зондирующих сигналов, поддержание канала связи с РБ 1. В составе модуля датчики крена, дифферента и компас, показания которых используются в обработке информации.
МОУ 6 для задачи, реализующей по пассивной технологии определение места шумящего объекта относительно выбранной системы координат по алгоритму в специальном вычислителе, МОУ 6 определяет необходимые параметры и передает далее по кабелю 7 эти данные поверхностному РБ 1. В МОУ 6 реализованы алгоритмы первичной обработки сигналов, включая процедуры адаптации к многокомпонентному полю помех, алгоритмы вторичной обработки, включая алгоритмы трассового обнаружения и алгоритмы автоматической классификации обнаруженных объектов.
Кабель-трос 7 (фиг.1), соединяющий РБ 1 с МГАК 2 имеет участок с распределенной плавучестью 8 и участок с распределенным балластом 9. Использование такого решения позволяет снизить влияние поверхностного волнения РБ 1 на МГАК 2.
Литература
1. Малашенко А.Е., Перунов В.В., Филимонов В.И., Рожков B.C. Автономная буйковая гидрофизическая станция. Патент на ПМ №61245, 01.11.2005 г.
2. Афруткин Г.И., Волокитин С.Б. и др. Приемная антенна гидроакустической станции кругового обзора. Патент РФ №2178572, 20.01.2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ГИДРОАКУСТИЧЕСКИЙ АНТЕННЫЙ МОДУЛЬ | 2009 |
|
RU2427005C2 |
| ДРЕЙФУЮЩАЯ БУЙКОВАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКОВ СИЛЬНЫХ ЗЕМЛЕТРЯСЕНИЙ И ЦУНАМИ | 2008 |
|
RU2405176C2 |
| Глобальная радиогидроакустическая система мониторинга полей атмосферы, океана и земной коры в морской среде и распознавания источников их формирования | 2017 |
|
RU2691295C2 |
| Способ формирования и применения глобальной радиогидроакустической системы мониторинга полей атмосферы, океана и земной коры в морской среде и распознавания их источников | 2017 |
|
RU2691294C2 |
| Способ экологического мониторинга и охраны районов нефтегазодобычи | 2016 |
|
RU2623837C1 |
| Радиогидроакустическая система экологического мониторинга и охраны районов нефтегазодобычи | 2016 |
|
RU2618671C1 |
| БУЙКОВАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКОВ СИЛЬНЫХ ЗЕМЛЕТРЯСЕНИЙ И ЦУНАМИ | 2008 |
|
RU2410725C2 |
| МАЛОГАБАРИТНАЯ АВТОНОМНАЯ СЕЙСМОАКУСТИЧЕСКАЯ СТАНЦИЯ | 2012 |
|
RU2540454C2 |
| Малогабаритная автономная сейсмоакустическая станция | 2015 |
|
RU2610029C1 |
| ЦИКЛИЧЕСКАЯ АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406640C1 |
Техническое решение относится к конструктивному выполнению средств гидрофизических исследований и может быть использовано, например, при реализации систем акустической томографии или систем пассивного обнаружения шумящих объектов. Техническим результатом изобретения является расширение функциональных возможностей. Автономная радиогидроакустическая станция (APГАС) содержит малогабаритный гидроакустический антенный комплекс (МГАК) и гибкую конструкцию радиобуя, наполняемую углекислым газом (РБ), цилиндрическую гидроакустическую антенну, приемопередатчик, источник питания, антенно-фидерное устройство, спутниковые системы связи «Гонец» и навигации «Глонасс», модуль обработки и управления (МОУ), датчики крена, дифферента и компас. При этом используется две звукопрозрачные антенные решетки цилиндрической формы, реализующие по пассивной технологии определение места шумящего объекта относительно выбранной системы координат. 3 ил.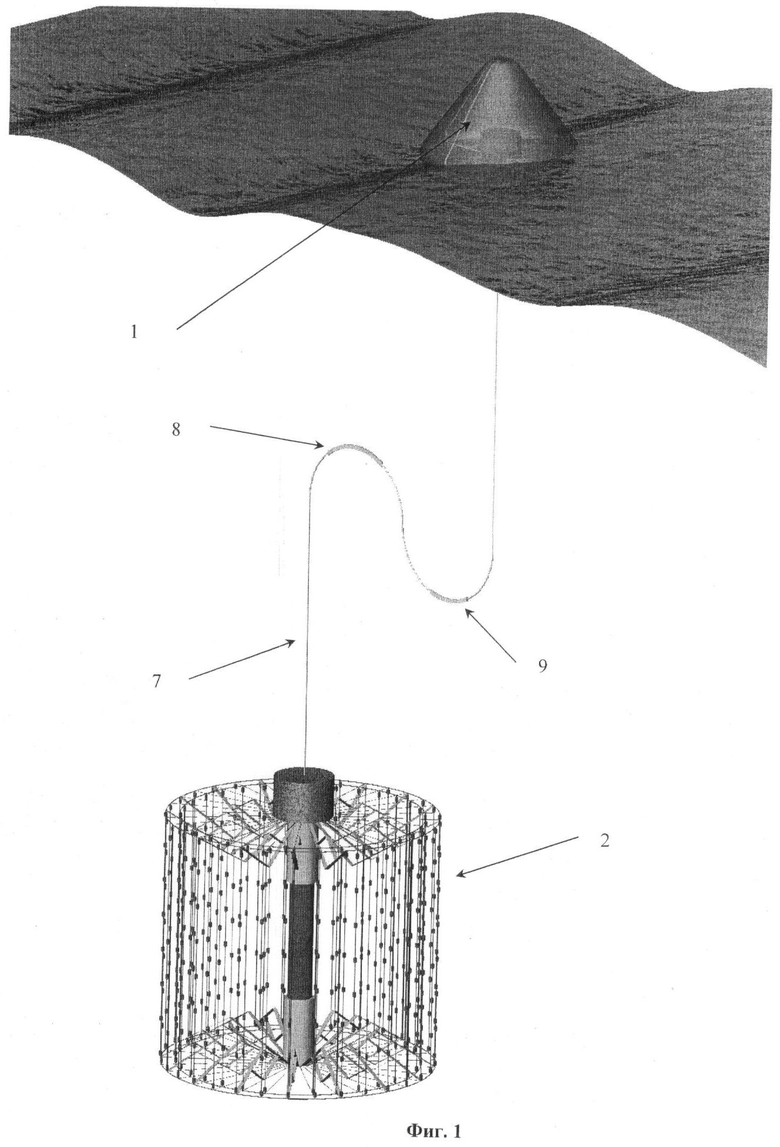
Автономная радиогидроакустическая станция (АРГАС), содержащая малогабаритный гидроакустический антенный комплекс (МГАК) и гибкую конструкцию радиобуя, наполняемую углекислым газом (РБ), цилиндрическую гидроакустическую антенну, приемопередатчик, источник питания, антенно-фидерное устройство, спутниковые системы связи «Гонец» и навигации «Глонасс», модуль обработки и управления (МОУ), датчики крена, дифферента и компас, отличающаяся тем, что используются две звукопрозрачные антенные решетки цилиндрической формы, реализующие по пассивной технологии определение места шумящего объекта относительно выбранной системы координат.
| Приспособление для последовательной установки объекта при рентгенографировании под заданными углами его поворота | 1939 |
|
SU61245A1 |
| СТАЦИОНАРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС (ВАРИАНТЫ) | 2001 |
|
RU2220069C2 |
| Поверхностный дрейфующий океанографический буй | 1982 |
|
SU1047774A1 |
| Устройство для гибки змеевиков | 1981 |
|
SU1009565A1 |
| РАДИОБУЙ | 2005 |
|
RU2283520C1 |
| WO 03067280 А1, 14.08.2003. | |||

