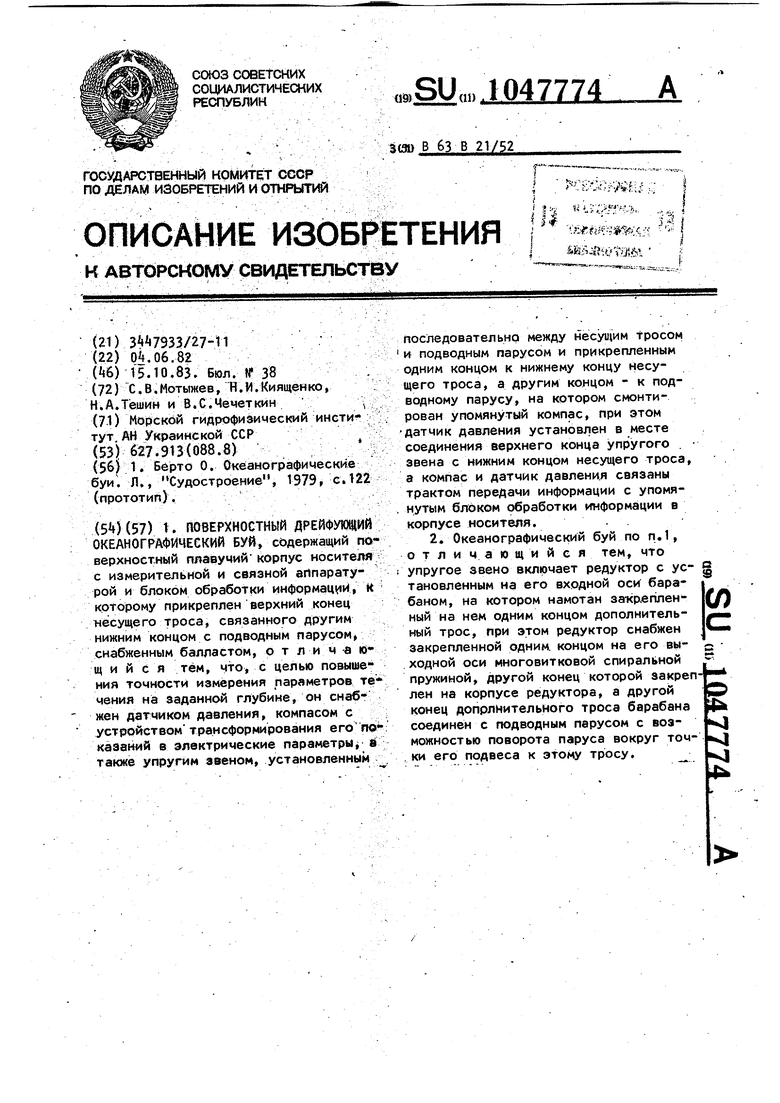
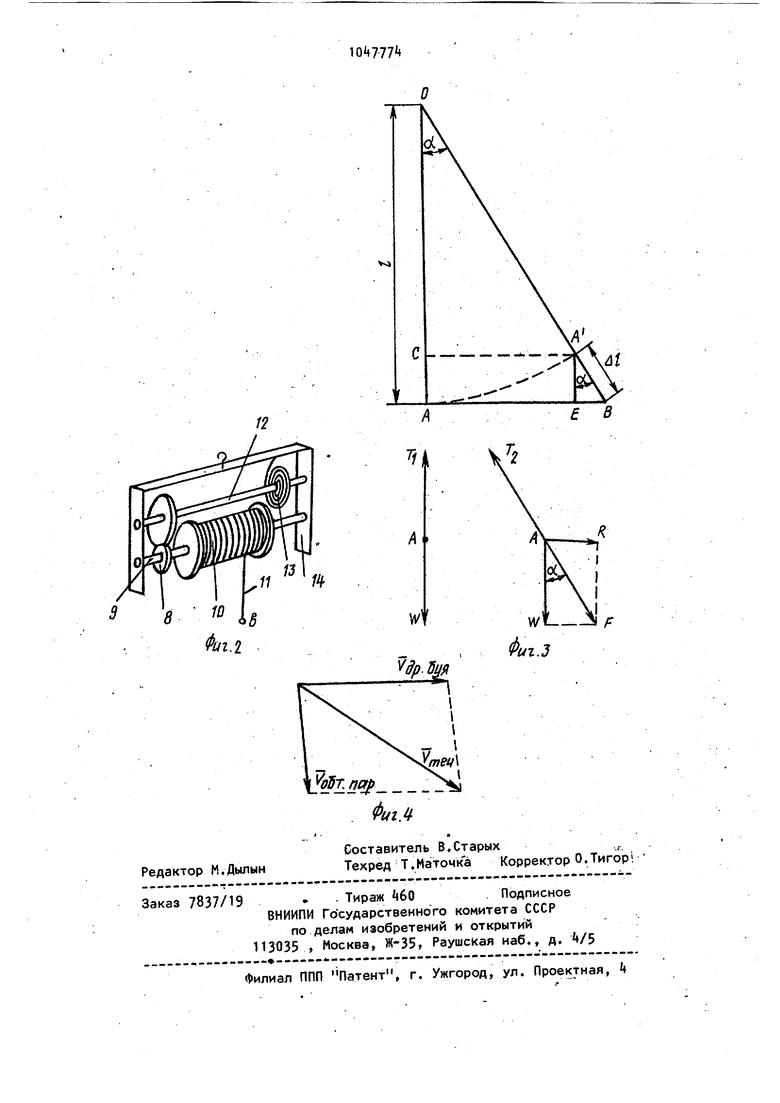
Изобретение относится к океанографии, в частности к поверхностным дрейфующим океанографическим буям. Известен поверхностный дрейфующий океанографический буй. содержащий по верхностный плавучий корпус носителя с измерительной и связной аппаратуро и блоком обработки информации, к которому прикреплен верхний конец несу щего троса, связанного другим нижним концом с подводным парусом, снабженным балластом tl 1 . Недостатком известного поверхност ного дрейфующего океанографического буя. является малая точность измерения параметров течения на заданной глубине. Цель изобретения - повышение точности измерения параметров течения на заданной глубине. Поставленная цель достигается тем что поверхностный дрейфующий океанографический буй, содержащий поверхностный плавучий корпус носителя с измерительной и связной аппаратурой и блоком обработки информации, к которому прикреплен верхний конец несущего троса, связанного другим нижним концом.с подводным парусом,снабженным балластом, снабжеь датчиком давления, компасом с устройств|рм трансформирования его показаний в электрические параметры,, а также упругим звеном, установленным последовательно между.несущим тросом, и.подводным парусом и прикрепленным одним концом к нижнему концу несущего троса, а другим концом - к подводному парусу, на котором .смонтирован упомя нутый компас, при этом датчик давления установлен в месте соединения верхнего конца упругого звена с нижним концом несущего троса, а компас и -датчик давления связаны трактом пе редачи информации с упомянутым блоко обработки информации в корпусе носителя. Кроме того, упругое звено включае : редуктор с установленным на его вход ной оси барабаном,на котором намотан, закрепленный на нем одним концом дополнительный трос, при этом редуктор снабжен закрепленной одним (донцом на его выхЬдной оси многовитковой спиральной пружиной, другой конец которой закреплен на корпусе редуктора, а другой конец дополнительного троса барабана соединен с подводным парусо с возможностью поворота паруса вокруг точки его подвеса к этому тросу. На фиг.1 схематически изображен . поверхностный океанографический буй, общий вид; на фиг,2 - упругое звено, общий вид; на фиг.З - взаимодействие сил, действующих на буй, схема; на фиг.4 - векторная диаграмма определения скорости течения на заданной глубине.. Поверхностный дрейфующий океанографический буй содержит поверхностный плавучий корпус 1 носителя -с измерительной и связной .аппаратурой и блоком обработки информации ( не показано, к которому прикреплен верхний конец о несущего троса 2, связанного другим нижним концом .J с подводным парусом 3, снабженным балластом t. Буй снабжен датчиком 5 давления, компасом 6 с ус ройством трансформирования е5; ;450казаний в электрические параметрьг, а также упругим звеном 7 установленным последовательно между несущим тросом 2 и подводным парусом 3 и прикрепленным одним концом к нижнему концу несущего троса 2, а другим концом - к подводному парусу 3. На подводном парусе 3 смонтирован компас 6. Датчик 5 давления установлен в месте соединения верхнего конца упругого звена 7 с нижним концом «З несущего троса 2. Компас 6 и датчик 5 давления связаны трактом передачи и нф.ормации, например электрическим кабелем, индукционным каналом или акустическим каналом, с упомянутым блоком обработки информации в корпусе 1 носителя. Упругое звено 7 включает редуктор 8 с установленным на его входной оси 9 барабаном 10, на котором намотан закрепленный на нем одним концом дополнительный . трос 11,, при этом редуктор 8 снабжен закрепленной одним концом на его выходной оси 12 многовитковой спиральной пружиной 13, другой конец которой закреплен на корпусе редуктора 8, выполненным в виде рамы 1. Другой конец - дополнительного троса 11. барабана соединен аодводным парусом 3 с возможностью поворота подводного паруса. 3 вокруг точки его подвеса к этому тросу 11. На фиг.З показано взаимодействие сил, действуюи;их на буйковую станцию, где 1 - общая несущего троса 2 и силовой рамы 1 упругого звена 7 д1 --необходимое приращение упругого звена 7 в зависимости от угла отклонения; О - точки подвеса несущего троса 2; А - Чочка подвеса подводного паруса 3. Буй работает следующим образом. При угле отклонения паруса 3, равном О, к точке подвеса А приложена сила тяжести паруса 3 вместе с балластом Л, которая уравновешивается силой реакции Т,( несущего троса 2 Упругое звено 7 в этом случае также находится под воздействием силы W, т.е. Xj V. . . Если ot О, на несущий трос 2 и упругое звено 7 действует сила F, являющаяся равнодействующей силы тя жести W и силы сопротивления Паруса обтекающему течению. В этом случае - гр . : . .CPSQI Удлинение упругого звена 7 на Л происходит за счет приращения силы реакции ЛТ Т - Т(чём больше значениео(., тем больше значение T/ji) На фиг. показана векторная диаграмма определения скорости течения на заданной глубине; где Удр БУЯ век тор скорости дрейфа поверхностного носителя относительно опорной системы координат; пор вектор скорос ти течения, обтекающего парус, параметры которого определяются с помои ью новых существенных; признаков; VTBM- вектор скорости течения на за данной глубине. Составляющая течения, которая обтекает парус 3, создает давление на него, что вызывает отклонение от вертикали паруса 3 с несущим тросом 2 по дуге, радиус которой определяется длиной несущего троса 2, Показания датчика 5 давления изменяются при отклонении несущего троса 2 от вертикали от значения на глубине Н, до значения на глубине Hj. Показания датчика 5 однозначно соответствуют определенным значениям скорости течения, обтекающего парус 3. Данные с датчика 5 давления передаются в апп ратуру корпуса 1 носителя по проводам в случае, если в качестве несущего троса 2 используется кабель-тро либо по индукционному каналу в случае использования металлического троса, либо по акустическому в случае, если необходимо использовать неметаллический несущий трос. Аналогично передаются данные с компаса 6, в качестве которого может быть использован магнитный компас с преобразователем угла поворота стрелки в электрические сигналы, либо ферроЗонд, сигналы с которого зависят от угла поворота относительно составляющих магнитного поля Земли. В случае использования кабель-троса или просто кабеля для передачи данных с компаса 6 в блок обработки информации аппаратуры носителя 1 кабель в районе упругого-звена 7 должен иметь слабину, достаточную для того, чтобы не препятствовать работе звена 7., При. этом, с целью исключения захлестывания кабеля.вокруг звена 7, парус 3 с KOMnadoM 6 подсоединяется к нижнему концу удлиняющегося звена 7 через вертлюг, способный передавать электрические сигналы. Подводный парус 3 имеет однозначную ориентацию относительно направления обтекающего течения. В качестве такого паруса 3 можно использовать конструкцию в виде оконной решетки с нормально присоединеннь1м вертикальным крылом. В этом случае компас 6, установленный на парусе 3 всегда покажет направление течения, обтекающего парус 3« При отклонении несущего троса 2 от верти кали со стороны паруса 3 начинает действовать дополнительная сила натяжения AT, приложенная к нижнему концу упругого звена. Из фиг. следует, что W Т; - Ь 11-7 - W COS ОС - W(l-coso) cosci этого же чертежа определяется из h cosoL другой стороны А Е 1 - ОС. I пг J ОС cosci. тогда А Е (l-cosoL) и окончательно t(l-cos) созЫ Упругое звено характеризуется зависимостьюМ КЛ1, где К - коэффициент упругости. Подставив в это выражение значения И iM , получаем W Т т.е. К - величина линейная. Это позволяет использовать в кпйестве упругого элемента либо пружину, либо резиновый жгут. Пружинное упругое звено {фиг.2) работает следующим образом. Подбирая коэффициент упругости пружины 13, коэффициент передачи ре дуктора 8 и диаметр барабана 10, до биваются требуемого коэффициента уп ругости звена 7 К , Перед подве сом паруса 3 с целью исключения вытягивания троса барабана 10 на длину пружине 13 обеспечивают предварительную затяжку с таким расчето чтобы сила крутящего момента, прилагаемая к месту подвеса паруса 3 со стороны троса барабана 10, равня лась весу паруса .3W В этом случае система, включающая yrtpyroe звено 7 и парус 3 с балластом , находится статическом равновесии и . Отклонение на угол оС за счет обтекающ.его течения вызыв т появление дополнительной силы натяжения Т, что приводит к необходимому увеличению длины ДС упругого звена. Погрешность, которая может возникнуть, если не учитывать составляю щую течения, действующего на обтекае мыи парус, для наиболее простого слу чая, когда на поверхности течение равно нулю V0 0 (на заданной глубине течение имеет скорость ), определяется.еледующим образом. В установившемся .режиме парус 3 не в состоянии обе спечить перемещение буя со скоростью V ,поскольку на поверхностный носитель 1 действует тормозящая сила гидродинамического сопро тивления встречного потока, обтекающе го притопленную часть буя. При этом возникает течение, обтекающее носитель 1 Vp&TB и течение, обтек ющее парус 3 оРтЯ и наблюдается равенствоСИЛ гидродинамического сопротивления, приложенных к носите лю (Rp) и парусу (RVJ) : % «иРаскрывая значения R/j 2 йfSB Б OБwtf Y f OSmУ где ррд - массовая плотнеетb.BOflw; Су,, коэффициенты сопротивления буя и паруса; , - миделевое сечение бкя и паруса. Откуда - v т: Для конкретного буя 2Si /, или V. 1Г с другой стороны скорость течения на заданной глубине можно предота;.вить как векторную сумму скорости дрейфа корпуса 1 носителя Удр и составляющей течения, обтекающего паРУС 3, /оет-У1 , т.е. 2. Р + обти ; Поскольку в рассматриваемом случае скорость поверхностного течения , то скорость течения, обтекающего буй VUSTS равна скорости дрейфа буя относительно опорной системы координат, т.е. orts Ар а . п Аг ТГ ЛР -i- др ч г что соответствует ошибке в 20% в слу чае, если определяется скорость течения на заданной глубине только по траектории перемещения корпуса 1 носителя без учета скорости составляющей течения обтекающего парус 3. В реальных условиях структура -течения по глубине носит как правило еще более сложный характер, в частности на поверхности и на заданной глубине течения различны по направлению В этом случае, если не учитывать составляющую течения, обтекающего парус 3 ошибка при определении параметров течения на глубине только по характеру перемещения носителя будет более значительна. Предложенный поверхностный дрейфующий буй обеспечивает значительное повышение точности измерения скорости , на заданной глубине за счет учета ско рости и направления течения, обтекающего подводный парус, а также сохранения местоположения паруса на заданной глубине.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дрейфующая станция для океанографических исследований | 1983 |
|
SU1113303A1 |
| ПЛАВУЧИЙ ОСТРОВ С.В.ШАРАПОВА | 1996 |
|
RU2107638C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ И ПОСТАНОВКИ ПРИТОПЛЕННОГО ОКЕАНОЛОГИЧЕСКОГО БУЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2529940C2 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| Дрейфующий океанографический буй | 1976 |
|
SU751708A1 |
| Заякоренная профилирующая подводная обсерватория | 2015 |
|
RU2617525C1 |
| СПОСОБ ПОСТАНОВКИ ПРИТОПЛЕННОГО ОКЕАНОЛОГИЧЕСКОГО БУЯ | 2009 |
|
RU2404081C1 |
| ПОДВОДНАЯ ГЕОФИЗИЧЕСКАЯ СТАНЦИЯ | 2010 |
|
RU2435180C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2559338C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ГИДРОЛОГИЧЕСКИХ ПАРАМЕТРОВ НА БОЛЬШИХ ГЛУБИНАХ | 2014 |
|
RU2571292C1 |
1. ПОВЕРХНОСТНЫЙ ДРЕЙФУЮЩИЙ ОКЕАНОГРАФИЧЕСКИЙ БУЙ, содержащий поверхностный плавучий корпус носителя с измерительной и связной аппарату рой и блоком обработки информац 1И, к которому прикреплен верхний конец 1ёсу1цего троса, связанного другим нижним концом с подводным парусом, снабженным балластом, о т л и ч -а ющ и и с я тем, что, с целью повышения точности измерения параметров те чения на заданной глубине, он снабжен датчиком давления, компасом с устройством трансформирования его показаний в электрические параметры, 8 также упругим звеном, установленным последовательно между несуи1им Тросом и подводным парусом и прикрепленным одним концом к нижнему концу несущего троса, а другим концом - к подводному парусу, на котором смонтирован упомянутый компас, при этом датчик давления установлен в месте соединения верхнего конца упругого . звена с нижним концом несущего троса, а компас и датчик давления связаны трактом передачи информации с упомя. нутым блоком обработки (формации в корпусе носителя. . . 2. Океанографический буй по п.1, о т л и чающи и с я тем, что i i упругое звено включает редуктор с установленным на его входной оси бара(Л баном, на котором намотан закрепленный на нем одним концом дополнительный трос, при этом редуктор снабжен закрепленной одним, концом на его выходной оси многовитковой спиральной пружиной, другой конец которой закрепо ( лен на корпусе редуктора, а другой конец допрлйительного троса барабана vi соединен с подводным парусом с можностью поворота паруса вокруг точ.ки его подвеса к этому тросу. 4ib