Изобретение относится к конструктивному выполнению средств гидрофизических исследований и может быть использовано, например, при реализации систем акустической томографии или систем пассивного обнаружения шумящих объектов.
При проведении гидроакустического мониторинга широко используются различные средства гидроакустического наблюдения, в том числе автономные буйковые станции.
Автономная буйковая станция (АБС), рассмотренная в работе [1] и выбранная нами в качестве прототипа, использует для сбора данных восемь гирлянд с восемью первичными датчиками, соединенными последовательно. АБС предназначена для выполнения долговременного гидрофизического мониторинга с возможностью определения места и оперативной передачи данных, для чего используются спутниковые системы передачи данных типа «Гонец» и навигации «ГЛОНАСС». Такие буйковые станции могут устанавливаться на тросе с помощью якоря в прибрежных зоне и в открытом океане или дрейфовать в океане. Оснащенные комплексом океанологических приборов АБС регулярно измеряют и передают полученные данные на центр обработки данных (ЦОД) по радиоканалу, в том числе по спутниковому каналу связи. Для дрейфующей АБС предусмотрена спутниковая навигационная система.
АБС состоит из герметичного аппаратурного модуля АБС в составе блока управления, источника питания. Наружу вынесены под радиопрозрачным колпаком антенна спутниковой систем связи «Гонец» и навигации «ГЛОНАСС» с абонентным пунктом, проблесковый световой маяк и радиоантенна, которые установлены на поплавке, изготовленного из синтетического материала. Кабель заведен в аппаратурный модуль с помощью гермоввода, для страховки сигнального кабеля от рывков применяются страховочные фалы, которые крепятся к кабелю с помощью специальных зажимов. За сигнальный кабель последовательно подключаются все восемь элементов «гирлянды» с первичными датчиками. Основным недостатком прототипа является ограниченная возможность использования АБС в качестве только линейной антенны с количеством от 8 до 64 первичных датчиков (гидрофонов), имеющая направленность только в вертикальной плоскости.
Известны приемные акустические антенны с цилиндрическим размещением приемных элементов, имеющие раздвижную конструкцию, обеспечивающую малые габариты в транспортном положении и необходимый волновой размер в рабочем положении, например акустические антенны современных зарубежных вертолетных станций FLASH, CORMORANT, HELRAS или отечественной станции «Приемная антенна гидроакустической станции кругового обзора» [3]. Эти станции предназначены для работы в паре с воздушными или надводными судами обеспечения (например, вертолетами).
Предлагаемый «Автономный гидроакустический антенный модуль» (АГАМ) представляет собой автономную станцию, выполняющую задачу по обнаружению шумящих объектов или задачу акустической томографии в составе нескольких АГАМ или в одиночку. При этом свое местоположение он определяет с помощью спутниковой системы навигации «ГЛОНАСС», ориентацию акустической антенны с помощью компасного устройства и датчиков остойчивости, глубину заглубления антенны с помощью датчика давления. Оперативная передача информации осуществляется с помощью спутниковой системы связи «Гонец». АГАМ может работать как в дрейфующем, так и заякоренном состояниях.
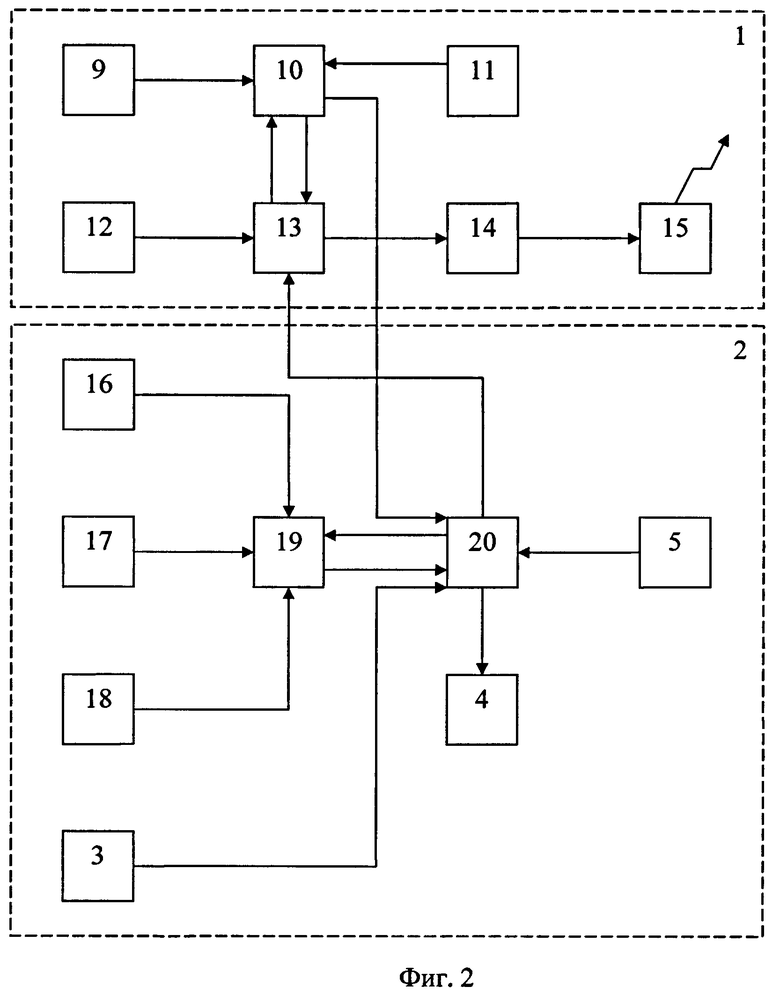
Предлагаемое изобретение (общий вид - на фиг.1, структурная схема - на фиг.2) «Автономный гидроакустический антенный модуль» (АГАМ) имеет в своем составе акустическую антенну цилиндрической формы, состоящую из 32 линейных антенн с восемью первичными гидрофонами 3. Линейные антенны 3 натянуты с помощью двух колец 8, жестко закрепленных за модуль цифровой обработки данных 2 (МЦОД). В состав МЦОД кроме цифровой аппаратуры, реализующей специальный алгоритм обработки антенной решетки, входят компасное устройство 17, датчики остойчивости 18, датчик давления 16, источник питания 5 и гидроакустический излучатель 4. Вспомогательная плавучесть 7 в паре с источником питания 5 обеспечивает в целом небольшую отрицательную плавучесть (не более 2 кг) и вертикальную остойчивость МЦОД. В определителе положения координатных осей антенны 19 компасное устройство 17 определяет текущую ориентировку, датчики остойчивости 18 (их три) определяют положения трех выбранных ортогональных векторов координат акустического антенного модуля и датчик давления 16, который определяет глубину заглубления антенной решетки. МЦОД для задачи, реализующей по пассивной технологии определение места шумящего объекта относительно выбранной системы координат, по алгоритму в специальном вычислителе блока управления 20 определяет необходимые параметры и передает далее по кабелю 6 эти данные поверхностному бую 1. Блок управления 20 одновременно выполняет управление всеми устройствами МЦОД 2, включая источник питания 5. В МЦОДе реализованы алгоритмы первичной обработки сигналов, включая процедуры адаптации к многокомпонентному полю помех, алгоритмы вторичной обработки, включая алгоритмы трассового обнаружения и алгоритмы автоматической классификации обнаруженных объектов.
Поверхностный буй 1 также, как и в работе [1], оснащен системой спутниковой навигации «ГЛОНАСС» 12 и связи «Гонец» 15, аппаратурой передачи данных 14 [2], программным устройством 10 и источником питания 11. В вычислителе 13 с учетом данных, полученных с помощью системы навигации «ГЛОНАСС» 12, определяет местоположение АГАМ и с учетом данных, полученных с МЦОД 2, определяет местоположение шумящего объекта в географической системе координат в фиксированные моменты времени, определяемой таймером 9. Далее по спутниковому каналу связи «Гонец» 15 оперативно передает в стационар для дальнейшей работы с этими данными. Управление режимами работ устройств АГАМ осуществляется программным устройством 10 через блок управления 20 и вычислитель 13. Система спутниковой связи «Гонец» обеспечивает оперативную передачу информации от АГАМ на стационар и команд из стационара на АГАМ на расстояниях до нескольких тысяч км в групповом режиме. При работе в персональном режиме передача осуществляется задержкой на время, необходимое на перелет спутника из зоны приема стационара на зону приема АГАМ (в этом случае дальность практически не ограничена).
АГАМ управляется программным устройством 10 по заданной программе по команде, полученной по радиоканалу через ССС «Гонец» 15, по системе гидроакустической связи (СГАС).
При выполнении задач гидроакустической томографии с использованием нескольких АГАМ предполагается использование нескольких СГАС с использованием акустических излучателей 4 и приемников 3, а также радиоканала с использованием ССС «Гонец» 15. Акустические излучатели могут быть использованы как для передачи информации, так и для контроля взаимного расположения АГАМ при работе в синхронном и пространственно разнесенном режиме нескольких АГАМ.
Литература
1. Малашенко А.Е. Перунов В.В., Филимонов В.И., Рожков B.C. Автономная буйковая гидрофизическая станция. Патент на ПМ №61245, 01.11.2005 г.
2. Малашенко А.Е., Малашенко А.А., Деревнин В.А., Леоненков Р.В., Сохатюк М.Ю. Аппаратура передачи данных гидрофизической информации с помощью системы спутниковой связи. Патент на ПМ №75117, 15.03.2007.
3. Афруткин Г.И., Волокитин С.Б. и др. Приемная антенна гидроакустической станции кругового обзора. Патент РФ №2178572, 20.01.2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНАЯ РАДИОГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ | 2009 |
|
RU2427004C2 |
| ДРЕЙФУЮЩАЯ БУЙКОВАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКОВ СИЛЬНЫХ ЗЕМЛЕТРЯСЕНИЙ И ЦУНАМИ | 2008 |
|
RU2405176C2 |
| МАЛОГАБАРИТНАЯ АВТОНОМНАЯ СЕЙСМОАКУСТИЧЕСКАЯ СТАНЦИЯ | 2012 |
|
RU2540454C2 |
| БУЙКОВАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКОВ СИЛЬНЫХ ЗЕМЛЕТРЯСЕНИЙ И ЦУНАМИ | 2008 |
|
RU2410725C2 |
| Глобальная радиогидроакустическая система мониторинга полей атмосферы, океана и земной коры в морской среде и распознавания источников их формирования | 2017 |
|
RU2691295C2 |
| ЦИКЛИЧЕСКАЯ АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406640C1 |
| Способ формирования и применения глобальной радиогидроакустической системы мониторинга полей атмосферы, океана и земной коры в морской среде и распознавания их источников | 2017 |
|
RU2691294C2 |
| Способ экологического мониторинга и охраны районов нефтегазодобычи | 2016 |
|
RU2623837C1 |
| АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406639C1 |
| Радиогидроакустическая система экологического мониторинга и охраны районов нефтегазодобычи | 2016 |
|
RU2618671C1 |
Автономный гидроакустический антенный модуль (АГАМ) представляет собой автономную станцию, выполняющую задачу по обнаружению шумящих объектов или задачу акустической томографии в составе нескольких АГАМ или в одиночку. При этом свое местоположение он определяет с помощью спутниковой системы навигации «ГЛОНАСС», ориентацию акустической антенны с помощью компасного устройства и датчиков остойчивости, глубину заглубления антенны с помощью датчика давления. В АГАМ применена цилиндрическая акустическая антенна, составленная из множества линейных антенн, натянутых с помощью двух колец, жестко закрепленных за модуль цифровой обработки данных. Оперативная передача информации осуществляется с помощью спутниковой системы связи «Гонец». АГАМ может работать как в дрейфующем, так и заякоренном состояниях. Техническим результатом изобретения является расширение функциональных возможностей. 2 ил.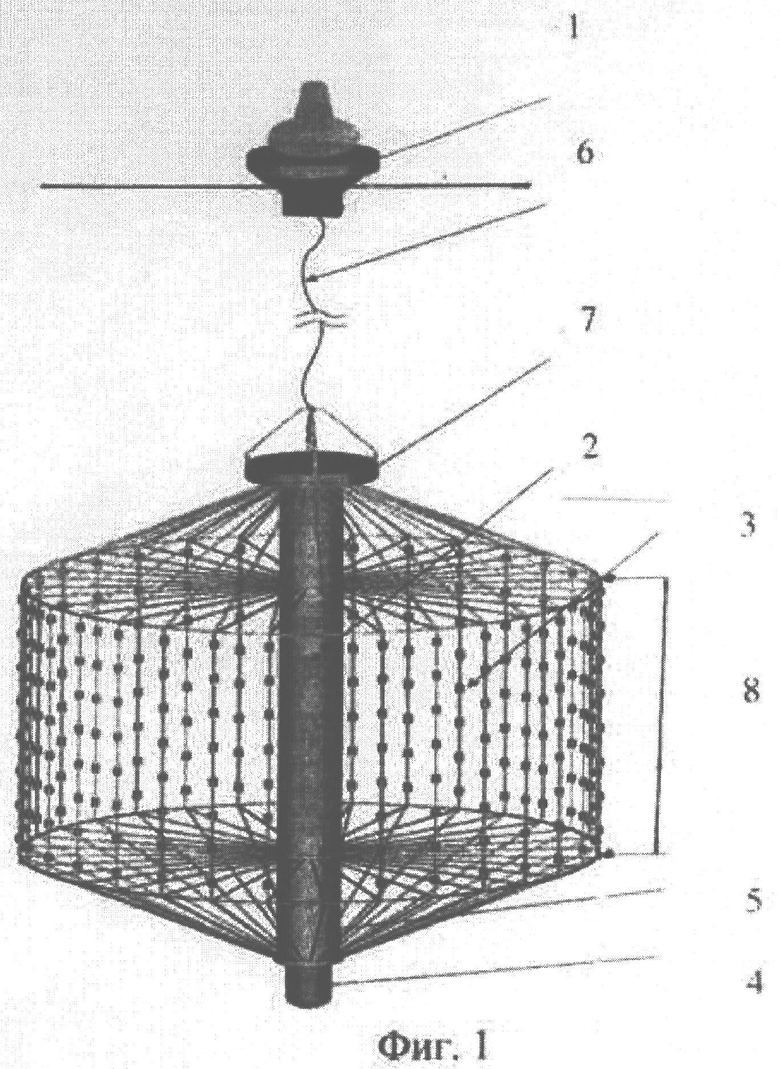
Автономный гидроакустический модуль, содержащий аппаратурный модуль в составе блока управления, источника питания, измерительных гидрофонов, модуля обработки данных, системы передачи информации по спутниковому каналу связи, системы определения места по спутниковой навигационной системе, компасного устройства, датчиков остойчивости и давления, отличающийся тем, что применяется цилиндрическая акустическая антенна, составленная из множества линейных антенн, натянутых с помощью двух колец, жестко закрепленных за модуль цифровой обработки данных.
| Способ облагораживания древесины | 1947 |
|
SU75117A1 |
| Устройство для автоматического регулирования метадины | 1938 |
|
SU56593A1 |
| Устройство для отгонки ароматических углеводородов из промывного масла | 1926 |
|
SU31283A1 |
| JP 4320986 А, 11.11.1992 | |||
| US 4494938 А, 22.01.1985. | |||

