Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к области транспортных средств и к определению данных, которые характеризуют целевое транспортное средство. В частности, изобретение относится к способу, устройству и компьютерному программному продукту для поддержания стратегии регулирования для вождения транспортного средства, а также к моторному транспортному средству, содержащему такое устройство.
Уровень техники
В области транспортных средств, а более конкретно, в области транспортирующих машин, существует множество разных механизмов управления, которые облегчают вождение транспортного средства.
Примерами этого являются адаптивные устройства поддержания скорости и функции поддержания обгона, которые указывают, когда должен выполняться обгон транспортных средств, находящихся впереди, и функции для снижения расхода топлива и предотвращения столкновений.
То, что является общим для многих этих функций, состоит в том, что они не только зависят от транспортного средства, являющегося ведомым, но также зависят от транспортных средств, которые впереди или позади такого транспортного средства, в дальнейшем, также называемых целевыми транспортными средствами. Такие транспортные средства могут иметь большое влияние на такие механизмы управления. Поэтому, чтобы можно было улучшать эти функции, может быть уместным определять различные характеристики целевого транспортного средства. Например, может быть уместным классифицировать целевое транспортное средство согласно некоторому типу транспортного средства или определять различные типы целевого транспортного средства, которые требуют разных результатов выбора в таких механизмах управления.
Классификация могла бы выполняться вручную, но, в таком случае, водитель должен был бы вводить классификационную информацию в такой механизм управления. Действие, таким образом, повлекло бы за собой направление водителем его/ее внимания на этот ввод данных, тем самым, возможно, приводя к водителю, не являющемуся внимательным к дорожному движению, что, в худшем случае, приводило бы к дорожно-транспортным происшествиям. Поэтому уместно, чтобы такая классификация транспортных средств была автоматической.
Получение других характеристик влечет за собой обработку данных.
Поэтому существует необходимость в автоматическом определении различных характеристик целевого транспортного средства, для того чтобы улучшать механизмы управления, используемые при вождении моторного транспортного средства.
В этой области существуют известные способы автоматической классификации целевого транспортного средства. Например, в WO 03/006291, радиолокационные датчики, датчики лазерных локаторов или видеосенсоры используются для измерения параметров, относящихся к объекту впереди, таких как расстояние до объекта, вертикальная и горизонтальная протяженность отражающей поверхности, геометрия объекта и характеристики поверхности у отражающей поверхности. Такие измеренные данные впоследствии используются в качестве основы для выбора класса объекта. Это же описание изобретения описывает это, выполняемое посредством корреляции характеристических классов объекта с измеренными данными. В этом контексте, каждый класс объекта имеет характеристическую модель. Упомянутые примеры таких моделей содержат поперечные сечения обратного рассеяния радиолокатора для определения мотоцикла и характеристическую скорость для определения здания. Каждый объект, поэтому, связан с классом объекта посредством корреляционного анализа измеренных данных на основании характеристических моделей для классов объекта.
WO 2004/086301 описывает, каким образом видеокамера используется для классификации транспортных средств посредством самообучающихся систем, которые были обучены в автономном режиме посредством примерных последовательностей.
Поэтому существует необходимость в простом, эффективном и автоматическом способе для определения характеристик целевого транспортного средства, например, классификации транспортного средства или других характеристик, таких как постоянная аэродинамического сопротивления и максимальная тяговая мощность.
Раскрытие изобретения
Задача настоящего изобретения состоит в том, чтобы определять, простым способом, характеристики целевого транспортного средства.
Настоящее изобретение делает это, основывая определение таких характеристик исключительно на ускорении целевого транспортного средства и соответствующих параметрах, таких как скорость. На основании этого, необходимо измерять только одну переменную целевого транспортного средства, а именно, расстояние между целевым транспортным средством и транспортным средством, на котором эти характеристики необходимы.
Согласно первому аспекту настоящего изобретения эта задача достигается способом для поддержания стратегии регулирования для вождения транспортного средства, включающим этапы:
определения множества значений ускорения для целевого транспортного средства на основании входных значений, которые принимают форму или выводятся из определяемых значений расстояния для расстояния между транспортным средством и целевым транспортным средством,
обработки значений ускорения для получения данных, которые характеризуют целевое транспортное средство и передачи указанных данных, которые характеризуют целевое транспортное средство в регулировочное устройство для регулирования вождения транспортного средства,
определения показателей распределения для ускорения на основании значений ускорения во множестве групп значений ускорения, каждая из которых содержит значения ускорения, определяемые по соответствующим значениям скорости транспортного средства впереди в пределах одного из, по меньшей мере, двух диапазонов скорости, и
классифицирования типов транспортных средств на основании показателей распределения, при этом указанные данные, которые характеризуют целевое транспортное средство, являются классификационными данными, которые соответствуют классификации.
Согласно второму аспекту настоящего изобретения эта задача также достигается устройством для поддержания стратегии регулирования для вождения транспортного средства, содержащим:
блок определения ускорения, выполненный с возможностью определения множества значений ускорения для транспортного средства впереди на основании входных значений из датчика расстояния, при этом входные значения принимают форму или выводятся из значений расстояния, определяемых датчиком для расстояния между транспортным средством и транспортным средством впереди, и
блок обработки значений ускорения, выполненный с возможностью обработки значений ускорения для получения данных, которые характеризуют целевое транспортное средство и передачи указанных данных, которые характеризуют целевое транспортное средство, в регулировочное устройство, выполненное с возможностью регулирования вождения транспортного средства,
блок определения распределения, выполненный с возможностью определения показателей распределения для ускорения на основании значений ускорения во множестве групп значений ускорения, каждая из которых содержит значения ускорения, определяемые по соответствующим значениям скорости транспортного средства впереди в пределах одного из, по меньшей мере, двух диапазонов скорости, и
блок классификации транспортных средств, выполненный с возможностью классифицирования типов транспортных средств на основании показателей распределения и передачи данных, которые характеризуют целевое транспортное средство в форме классификационных данных, которые соответствуют классификации.
Согласно третьему аспекту настоящего изобретения задача также достигается моторным транспортным средством, содержащим датчик расстояния для определения значений расстояния между транспортным средством и целевым транспортным средством, и выдачи входных значений, зависящих от значений расстояния, регулировочное устройство, выполненное с возможностью регулирования вождения транспортного средства, и устройство для поддержания стратегии регулирования для передвижения моторного транспортного средства согласно второму аспекту.
Согласно четвертому аспекту настоящего изобретения эта задача также достигается компьютерным программным продуктом для поддержания стратегии регулирования для вождения транспортного средства и содержащим компьютерные управляющие программы для побуждения компьютера, когда компьютерные управляющие программы загружены в компьютер:
определять множество значений ускорения для целевого транспортного средства на основании входных значений, которые принимают форму или выводятся из определяемых значений расстояния для расстояния между транспортным средством и целевым транспортным средством,
обрабатывать значения ускорения для получения данных, которые характеризуют целевое транспортное средство,
определять показатели распределения для ускорения на основании значений ускорения во множестве групп значений ускорения, каждая из которых содержит значения ускорения, определяемые по соответствующим значениям скорости транспортного средства впереди в пределах одного из, по меньшей мере, двух диапазонов скорости, и
передавать указанные данные, которые характеризуют целевое транспортное средство, в регулировочное устройство для регулирования вождения транспортного средства.
Изобретение обладает рядом преимуществ. Оно обеспечивает простой, эффективный и автоматический способ получения данных, которые характеризуют целевое транспортное средство. Более того, это делается на основании ускорения, которое также означает, что необходимо измерить только одну переменную по отношению к целевому транспортному средству, а именно, его расстояние. Изобретение, к тому же, является легким для реализации, поскольку оно по существу использует блоки, которые уже присутствуют в транспортном средстве. Единственными необходимыми дополнительными элементами являются блок определения скорости, блок определения ускорения и блок обработки значений ускорения, которые реализуются в программном обеспечении.
Краткое описание чертежей
Настоящее изобретение более подробно описано ниже со ссылкой на прилагаемые чертежи, на которых:
Фиг.1 представляет собой схематичный вид транспортного средства, передвигающегося по дороге позади транспортного средства, находящегося впереди, целевого транспортного средства,
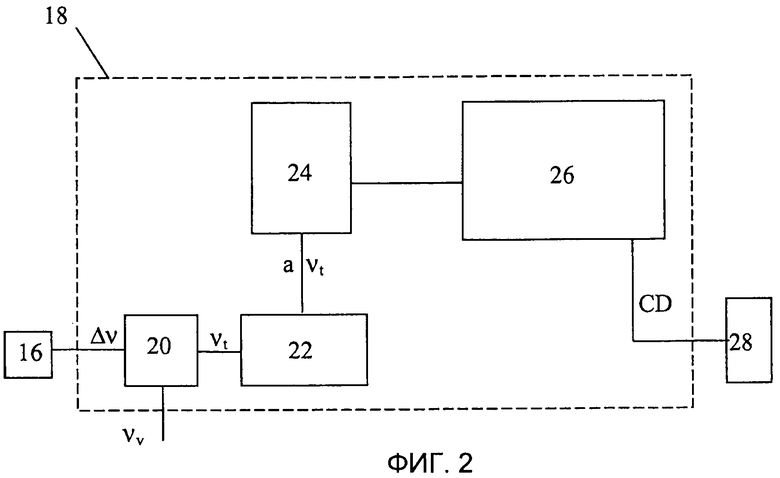
Фиг.2 представляет собой структурную схему общего устройства согласно изобретению для поддержания стратегии регулирования для вождения транспортного средства,
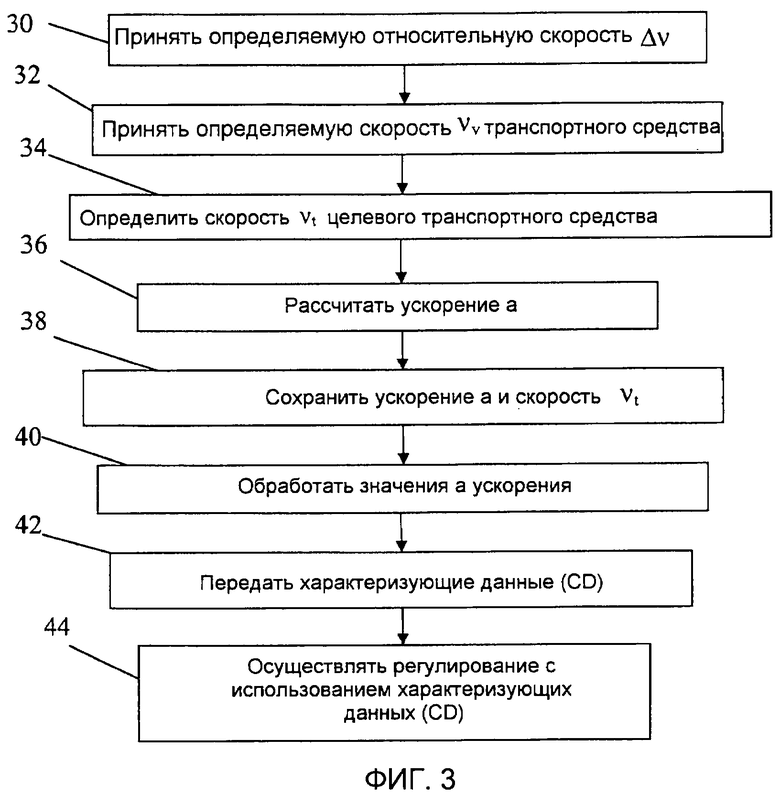
Фиг.3 представляет собой блок-схему последовательности операций общего способа согласно изобретению для поддержки стратегии регулирования для вождения транспортного средства,
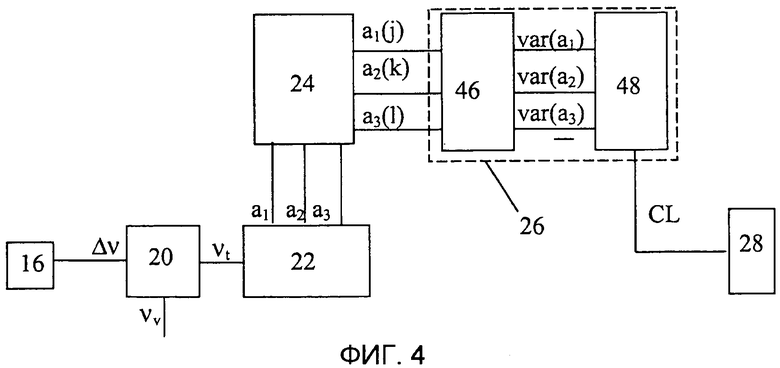
Фиг.4 представляет собой структурную схему устройства согласно первому варианту осуществления изобретения для поддержки стратегии регулирования для вождения транспортного средства,
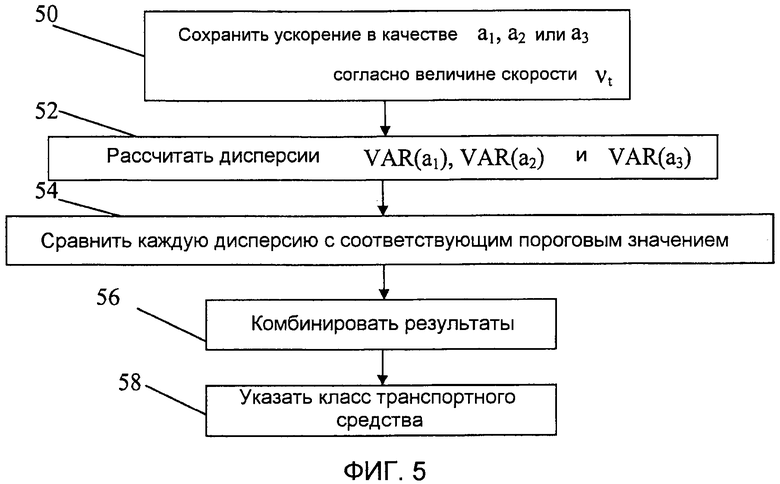
Фиг.5 представляет собой блок-схему последовательности операций множества этапов способа в способе согласно первому варианту осуществления изобретения для поддержки стратегии регулирования для вождения транспортного средства,
Фиг.6 представляет собой два распределения для группы ускорений, которые отличают тяжелое от легкого транспортного средства,
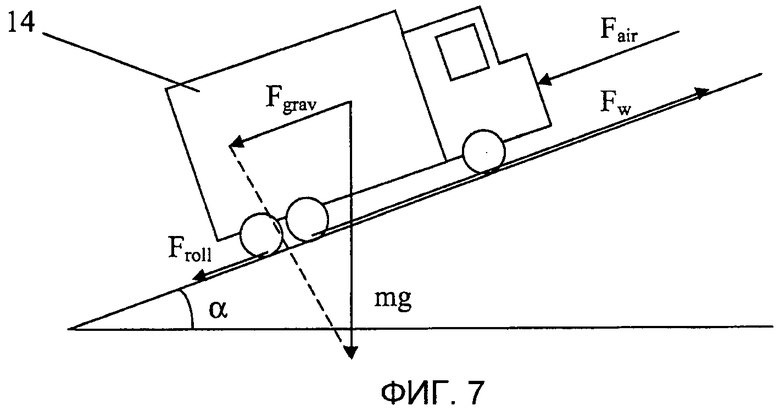
Фиг.7 представляет собой схематичный вид транспортного средства, передвигающегося по уклону, и силы, которые действуют на него,
Фиг.8 представляет собой структурную схему устройства согласно второму варианту осуществления изобретения для поддержки стратегии регулирования для вождения транспортного средства,
Фиг.9 представляет собой блок-схему последовательности операций множества этапов способа в способе согласно второму варианту осуществления изобретения для поддержки стратегии регулирования для вождения транспортного средства, и
Фиг.10 представляет собой схематичный вид компьютерного программного продукта в виде CD ROM диска, содержащего компьютерные управляющие программы для выполнения способа согласно настоящему изобретению.
Подробное описание предпочтительных вариантов
осуществления изобретения
Настоящее изобретение направлено на получение данных, которые характеризуют транспортное средство впереди, целевое транспортное средство, для того чтобы облегчать регулирование вождения транспортного средства. Данные, которые характеризуют целевое транспортное средство, поэтому поддерживают стратегию регулирования, согласно которой регулируется вождение транспортного средства.
В сегодняшних моторных транспортных средствах, а более конкретно, во многих тяжелых моторных транспортных средствах, теперь существует много разных средств обеспечения для водителя в регулировании транспортного средства, например, поддержание обгона, адаптивное поддержание скорости, управление уклонением от столкновений и расходом топлива.
Чтобы такие регулировочные функции хорошо работали, может быть важным, чтобы характеризующие данные касательно транспортного средства впереди или позади, так называемого целевого транспортного средства, получались так, чтобы могли предлагаться или выполняться правильные измерения. Последовательности получения таких характеризующих данных также должны быть автоматическими для того, чтобы водителю не требовалось получать такие данные вручную. Настоящее изобретение предназначено для получения таких характеристических данных простым, эффективным и автоматическим способом.
На фиг.1 показано моторное транспортное средство 10. Моторное транспортное средство 10 предпочтительно является грузовиком, хотя необходимо отметить, что настоящее изобретение не ограничено грузовиками, и может использоваться во всех моторных транспортных средствах. Изобретение не ограничено и транспортными средствами, управляемыми водителем, так как оно также может применяться в самоходных транспортных средствах. На фиг.1, моторное транспортное средство 10 передвигается по дороге 12. На дороге также есть целевое транспортное средство 14 в виде транспортного средства впереди, которое, в этом изображении, является еще одним грузовиком. Моторное транспортное средство 10 снабжено датчиком 16 расстояния, который может содержать радиолокатор, лазерный локатор или лазер. На основании отраженного сигнала у сигнала, испускаемого датчиком 16, расстояние d до целевого транспортного средства 14 может определяться этим датчиком 16. Некоторые такие датчики также могут рассчитывать значение относительной скорости.
На фиг.2 показана структурная схема общего устройства 18 согласно изобретению для поддержания стратегии регулирования для вождения транспортного средства. Это устройство присоединено к датчику 16, с которого оно принимает входные значения Δv в виде относительных скоростей, определенных для целевого транспортного средства датчиком 16. Устройство 18 также присоединено к иллюстративному регулировочному устройству 28, которое регулирует один или более аспектов вождения транспортного средства. Регулировочное устройство 28, например, может быть устройством, которое выполняет адаптивное поддержание скорости, обеспечивает поддержание обгона или защиту от столкновений, или управляет расходом топлива. Устройство 18 содержит блок 20 определения скорости, который принимает входные значения Δv. Этот блок 20 определения скорости также принимает значения v v скорости из устройства определения скорости на транспортном средстве 10 (не показано). Значения v v скорости, поэтому, относятся к скорости транспортного средства 10, которое является ведомым. Блок 20 определения скорости сам присоединен к блоку 22 определения ускорения, в который он выдает оцененные значения v t скорости для целевого транспортного средства 14. Блок 22 определения ускорения присоединен к памяти 24, в которую он передает значения ускорения и, к тому же, в некоторых случаях, соответствующие значения v t скорости. Память 24 присоединена к блоку 26 обработки значений ускорения, который присоединен к регулировочному устройству 28, в которое он выдает характеризующие данные CD.
Основной режим работы устройства будет описан более подробно ниже также со ссылкой на фиг.3, на которой показана блок-схема последовательности операций множества этапов способа, которые выполняются в общем способе согласно настоящему изобретению для поддержания стратегии регулирования для вождения транспортного средства.
Когда транспортное средство 10 передвигается по дороге 12, оно может оказаться позади транспортного средства, находящегося впереди, целевого транспортного средства 14. Когда это происходит, датчик 16 определяет расстояние d для такого целевого транспортного средства 14. Согласно варианту настоящего изобретения датчик 16 также будет рассчитывать относительную скорость Δv на основании этого определяемого расстояния d. Эта относительная скорость Δv затем подается, в качестве входного значения, в блок 20 определения скорости с периодическими регулируемыми интервалами времени, интервалами выборки. Блок 20 определения скорости, таким образом, принимает эти входные значения, этап 30. С такими же интервалами выборки, блок 20 определения скорости принимает значения v v скорости для транспортного средства 10, этап 32. На основании этих двух значений, блок 20 расчета скорости, после этого определяет или рассчитывает скорость v t для целевого транспортного средства 14 в каждом интервале выборки, этап 34. Эта скорость v t затем подается в блок 22 определения ускорения. На основании множества разных таких значений v t скорости, блок 22 определения ускорения затем рассчитывает ускорение a, которое соответствует скорости v t и определяемому расстоянию, этап 36. Блок 22 определения ускорения впоследствии сохраняет каждое такое значение a ускорения в памяти 24 вместе, где применимо, с соответствующим значением v t скорости, этап 38. Значения a ускорения и значения v t скорости, хранимые в памяти 24, затем обрабатываются в блоке 26 обработки значений ускорения, чтобы приходить к данным CD, которые характеризуют целевое транспортное средство 14, этап 40. После этого, эти характеризующие данные CD передаются в регулировочное устройство 28, которое самостоятельно регулирует функцию вождения транспортного средства с использованием этих данных CD, этап 44. Результатом является улучшенное регулирование транспортного средства по той причине, что эти характеризующие данные могут использоваться в процессе регулирования.
Согласно первому варианту осуществления настоящего изобретения, характеризующие данные CD являются данными классификации транспортного средства. Целевое транспортное средство, поэтому, классифицируется согласно этому первому варианту осуществления.
Такая классификация может выполняться в отношении типа транспортного средства, например, грузовика, легкового автомобиля, мотоцикла и т.д. Она также может осуществляться в отношении веса, мощности двигателя и т.д., транспортного средства впереди. Например, могут быть значительные различия между полностью нагруженным грузовиком и пустым грузовиком.
На фиг.4 показана структурная схема устройства 18 согласно первому варианту осуществления изобретения для поддержания стратегии регулирования для вождения транспортного средства. Как и на фиг.2, на фиг.4 показан датчик 16, который передает входные значения Δv в виде определений относительной скорости в блок 20 определения скорости, который, в этом случае, аналогичным образом принимает значения v v скорости. Блок 20 определения скорости здесь вновь присоединен к блоку 22 определения ускорения, который присоединен к памяти 24. В этом варианте осуществления блок 22 определения ускорения передает в эту память 24 значения a1, a2 и a3 ускорения, которые делятся на группы. Соединение здесь изображено в виде трех линий между этими блоками 22 и 24. Согласно этому первому варианту осуществления блок 26 обработки значений ускорения содержит блок 46 определения распределения и блок 48 классификации транспортных средств. Память 24 в этом первом варианте осуществления присоединена к блоку 46 определения распределения, соединение изображено здесь аналогичным образом, в виде трех линий, и передает значения a1(j), a2(k) и a3(l) ускорения в различных группах в указанный блок 46. Блок 46 определения распределения присоединен к блоку 48 классификации транспортных средств, соединение изображено здесь аналогичным образом, в виде трех линий, и передает значения var(a1), var(a2) и var(a3) распределения для различных групп в указанный блок 48. Блок 48 классификации транспортных средств присоединен к регулировочному устройству 28, в которое он передает классификационные данные CL. В этом варианте осуществления вышеупомянутые характеризующие данные, поэтому, содержат классификационные данные CL.
Части первого варианта осуществления далее будут описаны более подробно также со ссылкой на фиг.5, на которой показана блок-схема последовательности операций множества этапов способа, которые выполняются в способе согласно первому варианту осуществления для поддержания стратегии регулирования для вождения транспортного средства.
Расстояние d здесь определяется датчиком 16 таким же образом, как описано в описании изобретения. На основании этого расстояния d, относительной скорости Δv и скорости v v транспортного средства, блок 20 определения скорости впоследствии рассчитывает скорость v t целевого транспортного средства 14. Это сопровождается определением ускорения a блоком 22 определения ускорения. Значение a ускорения и значение v t скорости, таким образом, рассчитываются для каждого входного значения Δv, выдаваемого датчиком 16. Блок 22 определения ускорения затем сохраняет каждое такое значение ускорения в памяти 24. Здесь, значение ускорения сохраняется в группе, которая определяется имеющей отношение скоростью.
Группы здесь определяются согласно множеству диапазонов скорости, и которых, по меньшей мере, две, а в представленном примере - три. Однако, следует отметить, что возможна более высокая разрешающая способность с большим количеством диапазонов.
Если далее предполагается, что есть L групп диапазонов скорости, каждый отсчет n ускорения сохраняется согласно
a1(j)=a(n), om vt(n)>v1 j=1, 2, 3, …, m1 (1)
a2(k)=a(n) om v1>vt(n)>v2 k=1, 2, 3, …, m2 (2)
aL(l)=a(n) om vt(n)<vL-1 l=1, 2, 3, …, mL (3)
где v t - рассчитанная скорость целевого транспортного средства, а

Таким образом, есть L, каждая группа содержит множество значений ускорения, зависящих от соответствующего диапазона скорости. В вышеприведенном примере, таким образом, было три группы и, согласно изобретению, ускорения в памяти 24, поэтому, сохранены в качестве значений a1 ускорения в первой группе, значений a2 ускорения во второй группе и значений a3 ускорения в третьей группе согласно величине соответствующей целевой скорости vt, этап 50.
Блок 46 определения распределения затем собирает или берет значения ускорения в каждой группе из памяти 24 и рассчитывает показатель распределения для каждой группы значений ускорения. Показатель распределения может рассчитываться множеством разных способов, например, как дисперсия, среднеквадратическое отклонение или некоторый другой показатель распределения. В качестве примера, здесь рассчитывается дисперсия. Таким образом, блок определения распределения рассчитывает дисперсию для каждой группы, здесь, дисперсии VAR(a1), VAR(a2) и VAR(a3), этап 52.
Для группы с выборкой a=a1, a2, …, aN ускорения, дисперсия, таким образом, может рассчитываться согласно

где E(ai) - ожидаемое значение для ускорения ai, то есть среднее значение, а P(ai) - вероятность, что ускорение будет точно ai. Расчет точного значения дисперсии множества значений влечет за собой знание распределения вероятностей генеральной совокупности, из которой получают значения. Дисперсия может оцениваться, когда есть много значений. Способом оценки дисперсии является

Согласно варианту настоящего изобретения, ожидаемое значение предполагается нулевым, и тогда второй член в вышеприведенном выражении, выпадает.
Также можно оценивать ожидаемое значение согласно

В способе, описанном выше, множество дисперсий, таким образом, может рассчитываться для каждой группы. Дисперсии VAR(a1), VAR(a2) и VAR(a3) затем отправляются из блока 46 определения распределения в блок 48 классификации транспортных средств.
Блок 48 классификации транспортных средств впоследствии сравнивает каждую такую дисперсию с, по меньшей мере, одним соответствующим пороговым значением, этап 54. В представленном примере есть только одно такое пороговое значение, дисперсия выше него указывает легкое транспортное средство, а дисперсия ниже него указывает тяжелое транспортное средство. Однако следует отметить, что может быть множество таких пороговых значений. Затем блок 48 классификации транспортных средств комбинирует результаты соответственных сравнений, этап 56, и указывает класс транспортного средства на их основании, этап 58. Классификационные данные CL, соответствующие классификации, затем подаются в регулировочное устройство 28, которое регулирует функцию вождения транспортного средства с использованием этих данных указания класса транспортного средства.
Когда дисперсии комбинируются, они могут довольно легко сравниваться, и, если большинство их обозначают определенный тип транспортного средства, указывается такое транспортное средство. Также возможно, чтобы, в этом контексте, разные веса применялись к разным дисперсиям.
Дисперсия, соответствующая наивысшему диапазону скорости, например, может иметь больший вес, чем вторая, а дисперсия, соответствующая самому низкому диапазону скорости, может иметь низший вес. Также возможно, чтобы группа, которая содержит большее количество значений, имела больший вес, чем группа, которая содержит меньшее количество значений.
На фиг.6 показаны два распределения для разных транспортных средств в третьей группе a3 ускорений, иллюстрирующие как тяжелое транспортное средство может отличаться от легкого транспортного средства. Левый график изображает распределение для тяжелого транспортного средства, такого как грузовик, а правый график изображает распределение для легкого транспортного средства, такого как легковой автомобиль. Как видно, можно различать эти распределения соответствующим пороговым значением, в соответствии с которым дисперсия выше порогового значения указывает более легкое транспортное средство, а дисперсия ниже порогового значения - более тяжелое транспортное средство.
Что касается указания, также можно, чтобы вероятность правильного указания выражалась в показателях зависимости от того, сколько групп видятся правильными, и взвешивания групп.
Таким образом, регулировочное устройство может принимать классификационные данные, которые классифицируют транспортное средство, и регулирование поэтому может быть более эффективным. Более того, согласно первому варианту осуществления изобретения не требуется использование расчетов геометрии транспортного средства впереди, и потому необходима небольшая вычислительная мощность. Классификация транспортного средства, таким образом, достигается простым, эффективным и автоматическим образом. Классификация дает хорошее указание характеристик целевого транспортного средства, а также поведение его водителя.
Как упомянуто выше, классификационные данные могут указывать тип транспортного средства, такого как грузовик, легковой автомобиль, мотоцикл и т.д. Кроме того, то же самое может быть возможно в отношении веса, мощности двигателя и т.д., транспортного средства впереди. Например, могут быть значительные различия между полностью нагруженным грузовиком и пустым грузовиком.
Согласно изобретению другие характеризующие данные также могут определяться для целевого транспортного средства. Согласно второму варианту осуществления настоящего изобретения определяются характеризующие данные, такие как постоянная аэродинамического сопротивления, и данные, соответствующие максимальной тяговой мощности, по отношению к целевому транспортному средству. Постоянная аэродинамического сопротивления здесь является зависящей от аэродинамического сопротивления по отношению к весу целевого транспортного средства, а данные, соответствующие максимальной тяговой мощности, представляют максимальную тяговую мощность по отношению к весу целевого транспортного средства.
Транспортное средство, передвигающееся по дороге, подвергается воздействию множества разных сил. На фиг.7 схематично показано целевое транспортное средство 14, передвигающееся по подъему под углом наклона α. Это транспортное средство 14 подвергается воздействию движущей силы Fw колес, сопротивлению Fair воздуха, силы тяжести в направлении дороги, Fgrav, и сопротивлению Froll качению.
Как может быть видно на фиг.7, сила Fgrav тяжести в направлении дороги является составляющей гравитационной силы mg.
Ускорение транспортного средства, в таком случае, может быть описано уравнением
a=Fw/m-Froll/m-Fair(v)/m-Fgrav/m, (8)
где m - вес транспортного средства.
Здесь гравитационная сила в направлении дороги, Fgrav, также может достигаться посредством
Fgrav=mg sin(α). (9)
На фоне этой информации, далее будет описан второй вариант осуществления настоящего изобретения.
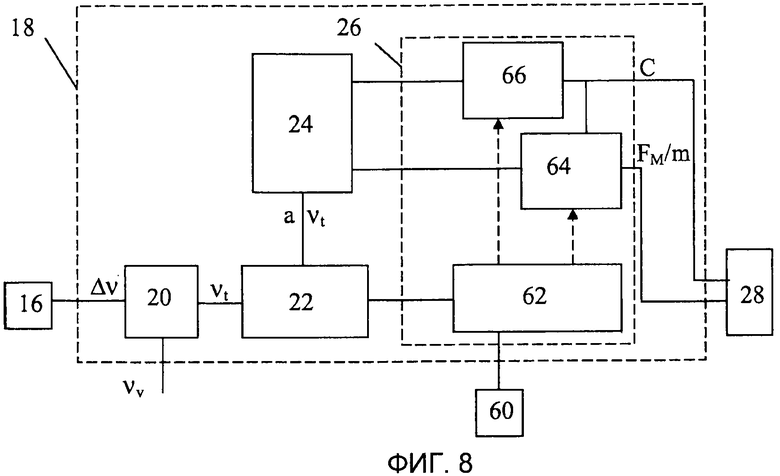
На фиг.8 показана структурная схема устройства 18 согласно второму варианту осуществления изобретения для поддержания стратегии регулирования для вождения транспортного средства. Как и на фиг.2, на фиг. 8 показан датчик 16, который передает входные значения Δv в виде определений относительной скорости в блок 20 определения скорости, который здесь аналогичным образом принимает значения v v скорости. Блок 20 определения скорости здесь вновь присоединен к блоку 22 определения ускорения, который присоединен к памяти 24. В этом варианте осуществления блок 22 определения ускорения передает в память 24 значения a ускорения и также соответствующие значения v t скорости. Согласно второму варианту осуществления блок 26 обработки значений ускорения содержит блок 62 определения уклона, присоединенный к блоку 22 определения ускорения. Блок 62 определения уклона также присоединен к блоку 60 определения угла наклона на транспортном средстве. Такой блок определения угла наклона может определять угол наклона некоторого уклона, по которому передвигается транспортное средство. Для этого, он может использовать акселерометр, топографические данные, данные карты и т.д., для получения значения для угла наклона уклона. Также возможно, что датчики, указывающие угол наклона уклона, могут быть расположены близко к дороге. Датчики, в таком случае, могли бы считываться радиолокатором, микроволнами или некоторой другой технологией считывания, такой как RFID (радиочастотная идентификация). Данные угла наклона с каждого такого датчика, расположенного около дороги, впоследствии могли бы подаваться в блок 62 определения уклона. Также можно, чтобы угол наклона определялся без прямого измерения, например, он мог бы определяться на основании тяговой мощности и сопротивления движению соответствующего транспортного средства.
Блок 26 обработки значений ускорения также содержит блок 66 определения постоянной аэродинамического сопротивления и блок 64 определения тяговой мощности, которые присоединены к памяти 24. Блок 66 определения постоянной аэродинамического сопротивления также присоединен к блоку 64 определения тяговой мощности. Блок 66 определения постоянной аэродинамического сопротивления и блок 64 определения тяговой мощности могут, предпочтительно, принимать форму фильтров Калмана и, в таком случае, так называемых «расширенных» фильтров Калмана. Блок 62 определения угла наклона управляет блоком 66 определения постоянной аэродинамического сопротивления и блоком 64 определения тяговой мощности, управление представлено стрелками пунктирных линий. Блок 66 определения постоянной аэродинамического сопротивления передает в регулировочное устройство 28 и блок 64 определения тяговой мощности постоянную C аэродинамического сопротивления, а блок 64 определения тяговой мощности передает в регулировочное устройство 28 данные FM/m, соответствующие максимальной тяговой мощности целевого транспортного средства. В этом варианте осуществления вышеупомянутые характеризующие данные, поэтому, содержат постоянную C аэродинамического сопротивления и данные FM/m, соответствующие максимальной тяговой мощности целевого транспортного средства.
Части второго варианта осуществления будут описаны более подробно ниже также со ссылкой на фиг.9, на которой показана блок-схема последовательности операций множества этапов способа, которые выполняются в способе согласно второму варианту осуществления изобретения для поддержания стратегии регулирования для вождения транспортного средства.
Расстояние d здесь определяется датчиком 16 таким же образом, как описано в описании изобретения. На основании этого расстояния d относительной скорости Δv и скорости v f транспортного средства, блок 20 определения скорости впоследствии рассчитывает скорость v t целевого транспортного средства 14. Это сопровождается определением ускорения a блоком 22 определения ускорения. Значение a ускорения и значение v t скорости, таким образом, рассчитываются для каждого входного значения, выдаваемого датчиком 16. Значения a, v t ускорения и скорости затем сохраняются в памяти 24, этап 68. Это выполняется непрерывно. Блок 62 определения уклона также принимает значения ускорения и скорости. Этот блок 62 сначала определяет, находится ли целевое транспортное средство 14 на спуске, который имеет достаточный угол наклона. Такое определение может происходить посредством определения значений ускорения, принятых на максимальной скорости целевого транспортного средства, например, максимальной скорости в 90 км/ч. Грузовик, передвигающийся на этой скорости, будет увеличивать свою скорость в некоторой степени, когда он достигает спуска. Таким образом, он будет в некоторой степени ускоряться. Поэтому, если анализ ускорения a показывает короткое повышение скорости на максимальной скорости, этап 70, блок 62 определения уклона будет предполагать, что целевое транспортное средство 14 находится на возможном спуске. Если ускорение не демонстрирует повышение скорости на максимальной скорости, этап 70, способ продолжается этапом 78 для определения, было ли целевое транспортное средство 14 на подъеме. Если был возможный спуск, значения скорости и ускорения, полученные для целевого транспортного средства и сохраненные в памяти 24, поэтому, указываются в качестве значений, которые могут быть приписаны возможному спуску. Когда транспортное средство 10 само достигает положения, где указывался возможный уклон, блок 62 определения уклона определяет угол наклона уклона, этап 72. Это может осуществляться посредством приема соответствующих данных с датчика 60. Затем определяется, достаточен ли угол наклона уклона, каким он обычно будет, если угол наклона является большим, чем 1-2%. Если этот угол наклона не достаточен, этап 74, способ продолжается для сбора значений ускорения и скорости, этап 68. Наоборот, если угол наклона был достаточным, этап 74, поэтому, указывается, что целевое транспортное средство было на спуске, а блок 62 определения уклона будет предписывать блоку 66 определения постоянной аэродинамического сопротивления определять постоянную аэродинамического сопротивления на основании значений в памяти 24, которые были указаны в качестве значений, которые могут быть приписаны такому спуску. Определение этой постоянной C выполняется на этапе 76.
На спуске с достаточным углом наклона целевое транспортное средство 14 не будет ускоряться в некоторой степени, а просто катиться. Результатом является ускорение, которое обусловлено силой тяжести, являющейся большей, чем сопротивление качению и аэродинамическое сопротивление. Это означает, что движущая сила Fw колес в уравнении (8), приведенном выше, будет нулевой. Более того, член Fair(v)/m здесь будет квадратичной зависимостью от скорости и, таким образом, может быть записан как C · v2.
Это означает, что на спуске можно упрощать уравнение (8), в качестве модифицированного уравнения (9), до
a=-Froll/m 2 C · v2+g · sin(α). (10)
Здесь, Froll/m по существу постоянно и очень мало, что дает возможность рассчитывать C, которое является постоянной аэродинамического сопротивления для отдельного целевого транспортного средства и является зависимым от веса последнего.
Таким образом, постоянная C аэродинамического сопротивления может рассчитываться, когда целевое транспортное средство 14 передвигается на спуске. Это значение может передаваться блоком 66 определения постоянной аэродинамического сопротивления в регулировочное устройство 28 и блок 64 определения тяговой мощности.
Если ускорение на максимальной скорости было не большим, чем нуль, этап 70, блок 62 определения уклона определяет, находится ли целевое транспортное средство 14 на подъеме, который имеет достаточный угол наклона. Указание возможного подъема может быть получено посредством определения значений ускорения, принятых на максимальной скорости целевого транспортного средства, например, здесь снова максимальной скорости в 90 км/ч. Грузовик, передвигающийся на этой скорости, будет уменьшать скорость в некоторой степени, когда он достигает подъема. Таким образом, он будет в некоторой степени замедляться. Поэтому, если анализ ускорения показывает короткое понижение скорости на максимальной скорости, этап 78, блок 62 определения уклона будет предполагать, что целевое транспортное средство передвигается по возможному подъему. Если ускорение на максимальной скорости не было отрицательным, этап 78, способ продолжается сбором значений a, v t ускорения и скорости, этап 68. Наоборот, если был возможный подъем, этап 78, значения скорости и ускорения, собранные для целевого транспортного средства и сохраненные в памяти 24, поэтому, будут указываться в качестве значений, которые могут быть приписаны возможному подъему. Когда транспортное средство 10 достигает положения, где указывался возможный подъем, блок 62 определения уклона определяет угол наклона уклона, этап 80. Это может осуществляться посредством сбора соответствующих данных с датчика 60. Блок 62 определения уклона затем определяет, достаточен ли угол наклона уклона, каким он обычно будет, если угол наклона является большим, чем 1%. Если этот угол наклона не достаточен, этап 82, способ продолжается сбором значений ускорения и скорости, этап 68. Наоборот, если угол наклона был достаточным, этап 82, блок 62 определения уклона затем предписывает блоку 64 определения тяговой мощности определять максимальную тяговую мощность по отношению к весу целевого транспортного средства, что выполняется на этапе 84. После этого, способ возвращается к сохранению значений ускорения и скорости, этап 68.
На подъеме с достаточным углом наклона, целевое транспортное средство будет использовать свою максимальную тяговую мощность. Поскольку постоянная аэродинамического сопротивления во многих случаях будет уже определенной, можно рассчитывать максимальную тяговую мощность по отношению к весу по ранее изложенному уравнению (8), модифицированному уравнением (9), в которых Fw теперь будет установлено в максимальную тяговую мощность FM. Уравнение (8), модифицированное уравнением (9), в таком случае, будет следующим:
a=FM/m-Froll/m-C · v2-g · sin(α). (11)
Здесь, Froll/m по существу постоянно и очень мало. Так как C теперь известна, поэтому можно рассчитать FM/m.
Таким образом, максимальная тяговая мощность по отношению к весу FM/m может рассчитываться, когда целевое транспортное средство передвигается на подъеме. Это значение затем может передаваться блоком 64 определения тяговой мощности в регулировочное устройство 28.
Возможно, что, на подъеме, никакая постоянная аэродинамического сопротивления еще не была определена. В таком случае, можно, чтобы такая постоянная оценивалась, и чтобы оцененная постоянная после этого замещалась рассчитанной постоянной аэродинамического сопротивления, когда был пройден спуск. Способ получения такой оценки, если комбинируются первый и второй варианты осуществления, предназначен, чтобы оценка происходила на основании классификации транспортного средства, которая была выполнена.
Таким образом, регулировочное устройство получает характеристические данные касательно целевого транспортного средства, которые впоследствии могут использоваться в регулировочной функции. В этом контексте, постоянная аэродинамического сопротивления может предоставлять данные, которые полезны для регулирования по той причине, что они могут использоваться для определения, какое из транспортного средства и целевого транспортного средства катится быстрее под уклон. Аналогичным образом, максимальная тяговая мощность по отношению к весу может предоставлять полезные данные о том, какое из транспортных средств мощнее на подъем. Это, например, может использоваться в адаптивном устройстве поддержания скорости. Постоянная аэродинамического сопротивления также может использоваться для определения расстояния, которое должно сохранять транспортное средство от целевого транспортного средства.
Память 24 может принимать форму традиционной памяти, такой как память ОЗУ (оперативного запоминающего устройства). Блок определения скорости, блок определения ускорения и блок обработки значений ускорения предпочтительно принимают форму одного или более микропроцессоров с одной или более памятью программ, содержащими компьютерные управляющие программы, которые выполняют способ согласно изобретению. Это может достигаться посредством компьютера, но следует отметить, что вышеупомянутые блоки также могут быть реализованы подходящей комбинацией логических схем. Различные блоки аппаратных средств на транспортном средстве также могут поддерживать связь друг с другом через шину данных, например, так называемую шину CAN (локальной сети контроллеров). Вышеупомянутые управляющие программы также могут поставляться в виде компьютерного программного продукта, который может быть в форме портативного устройства памяти, такого как CD ROM диск. Такой диск 86 схематично показан на фиг.10. Управляющие программы также могут поставляться в форме простых компьютерных управляющих программ, которые могут быть установлены на сервере, и загружаться с него на транспортное средство. Когда такие управляющие программы были загружены в компьютер или блок управления на транспортном средстве, было реализовано устройство согласно изобретению.
Изобретение согласно обоим вариантам осуществления, таким образом, обеспечивает регулировочное устройство с характеристическими данными для целевого транспортного средства. Это заставляет регулировочное средство функционировать лучше. Этот также улучшает безопасность дорожного движения по той причине, что адаптации к целевому транспортному средству могут выполняться лучше. Дополнительное преимущество изобретения состоит в том, что пониженный расход топлива мог бы достигаться с помощью автоматического устройства поддержания скорости, которое основано на данных расстояния, поскольку увеличенное количество сведений о целевом транспортном средстве может использоваться в сочетании с топографическими данными для управления расстояния и минимизации торможения.
Настоящее изобретение обладает рядом дополнительных преимуществ. Оно обеспечивает простой, эффективный и автоматический способ получения данных, которые характеризуют целевое транспортное средство. Более того, это осуществляется на основании ускорения. Это означает, что необходимо измерять только одну переменную в отношении целевого транспортного средства, а именно его расстояние. Кроме того, изобретение является легким для реализации по той причине, что оно по существу использует блоки, которые уже присутствуют в транспортном средстве. Единственными необходимыми дополнительными элементами являются блок определения скорости, блок определения ускорения и блок обработки значений ускорения, которые реализуются в программном обеспечении.
Как указано выше, изобретение может быть изменено различным образом. Два варианта осуществления изобретения могут применяться отдельно или в комбинации. Устройство согласно изобретению может содержать один или оба из датчиков, описанных выше, а также регулировочное устройство. Датчик расстояния описывался выше в качестве рассчитывающего относительную скорость. Также возможно, чтобы оно могло рассчитывать скорость целевого транспортного средства на основании скорости транспортного средства. В качестве альтернативы, также возможно, чтобы блок определения скорости рассчитывал относительную скорость. Также можно предусмотреть единый блок расчета, который рассчитывает как ускорение, так и скорость. Поэтому настоящее изобретение должно ограничиваться только формулой изобретения, приведенной ниже.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАТНОЙ СВЯЗИ ОБ УКЛОНЕ | 2009 |
|
RU2477690C2 |
| СПОСОБ И МОДУЛЬ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2534114C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА, СПОСОБ ДЛЯ ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2580366C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДИСТАНЦИИ ТРАНСПОРТНОГО СРЕДСТВА ДО ВПЕРЕДИ ИДУЩЕГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2662105C2 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2538907C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2605648C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2673581C2 |
| СПОСОБ ПОМОЩИ ПРИ ДВИЖЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ДВИЖЕНИИ | 2017 |
|
RU2743829C1 |
| ПЛАНИРОВАНИЕ ТРАЕКТОРИИ | 2019 |
|
RU2762786C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ВНУТРИПОЕЗДНЫХ СИЛ ПОЕЗДА | 2007 |
|
RU2424933C2 |



Группа изобретений относится к технике обеспечения безопасности движения транспортных средств. Согласно заявленному способу множество значений ускорения для целевого транспортного средства определяют на основании входных значений, которые принимают форму или выводятся из определяемых значений расстояния между транспортным средством и целевым (впереди или позади следующим) транспортным средством. Значения ускорения впоследствии обрабатываются для получения данных, которые характеризуют целевое транспортное средство. Эти данные, которые характеризуют целевое транспортное средство, впоследствии передаются для регулирования вождения транспортного средства. Группа изобретений обеспечивает повышенную безопасность движения транспортных средств за счет лучшей адаптации к целевым транспортным средствам. 3 н. и 18 з.п. ф-лы, 10 ил.
1. Способ для поддержания стратегии регулирования для вождения транспортного средства (10), включающий этапы, на которых:
определяют (36) множество значений (a; a1, a2, а3) ускорения для целевого транспортного средства (14) на основании входных значений (Δv), которые принимают форму или выводятся из определяемых значений расстояния для расстояния (d) между транспортным средством и целевым транспортным средством,
обрабатывают (40; 52, 54, 56, 58; 70, 72, 74, 76, 78, 80, 82, 84) значения ускорения для получения данных (CD; CL; С, FM/m), которые характеризуют целевое транспортное средство, и
передают (42) указанные данные, которые характеризуют целевое транспортное средство, в регулировочное устройство (28) для регулирования (44) вождения транспортного средства,
определяют (52) показатели (VAR(a1), VAR(а2), VAR(а3)) распределения для ускорения на основании значений ускорения во множестве групп значений (a1, а2, а3) ускорения, при этом каждая группа содержит значения ускорения, определяемые по соответствующим значениям скорости транспортного средства впереди в пределах одного из, по меньшей мере, двух диапазонов скорости, и
классифицируют (58) типы транспортных средств на основании показателей распределения, причем указанные данные, которые характеризуют целевое транспортное средство, являются классифицированными данными (CL), которые соответствуют классификации.
2. Способ по п.1, в котором каждый показатель распределения сравнивают (54) с, по меньшей мере, одним пороговым значением, а тип транспортного средства классифицируют комбинированием (56) результатов соответствующих сравнений.
3. Способ по п.1 или 2, в котором комбинирование влечет за собой придание большего веса показателю распределения, рассчитанному для более высокого диапазона скоростей, чем рассчитанному для более низкого диапазона скоростей.
4. Способ по п.1, в котором комбинирование влечет за собой придание большего веса показателю распределения, основанному на многих значениях ускорения, чем основанному на меньшем количестве значений ускорения.
5. Способ по п.1, дополнительно включающий этап, на котором рассчитывают вероятность, что классификация верна, на основании различных показателей распределения.
6. Способ по п.1, в котором этап, на котором обрабатывают значения ускорения, дополнительно включает этапы, на которых определяют (70, 72, 74), находится ли целевое транспортное средство на спуске, и определяют (76) постоянную (С) аэродинамического сопротивления для целевого транспортного средства на основании значений (а) ускорения, собранных, когда целевое транспортное средство находится на спуске, при этом указанные данные, которые характеризуют целевое транспортное средство, содержат постоянную (С) аэродинамического сопротивления.
7. Способ по п.6, в котором этап, на котором обрабатывают значения ускорения, дополнительно включает этапы, на которых определяют (78, 80, 82), находится ли целевое транспортное средство на подъеме, и определяют (84) данные (FM/m), соответствующие максимальной тяговой мощности целевого транспортного средства на основании значений ускорения, собранных, когда целевое транспортное средство находится на подъеме, при этом указанные данные, которые характеризуют целевое транспортное средство, содержат данные (FM/m), соответствующие максимальной тяговой мощности (FM) целевого транспортного средства.
8. Способ по п.7, в котором определение данных (FM/m), соответствующих максимальной тяговой мощности (FM) целевого транспортного средства, также основано на постоянной (С) аэродинамического сопротивления.
9. Способ по п.6, в котором этап, на котором обрабатывают значения ускорения, дополнительно включает этап, на котором определяют (72, 80) угол (α) наклона уклона и используют угол наклона при обработке значений ускорения, которая выполняется по отношению к такому уклону.
10. Устройство (18) для поддержания стратегии регулирования для вождения транспортного средства (10), содержащее:
блок (22) определения ускорения, выполненный с возможностью определения множества значений (a; a1, a2, а3) ускорения для транспортного средства (14) впереди на основании входных значений (Δv) из датчика (16) расстояния, при этом входные значения принимают форму или выводятся из значений расстояния, определяемых датчиком для расстояния (d) между транспортным средством и транспортным средством впереди,
блок (26) обработки значений ускорения, выполненный с возможностью обработки значений ускорения для получения данных (CD; CL; С, FM/m), которые характеризуют целевое транспортное средство, и передачи указанных данных, которые характеризуют целевое транспортное средство, в регулировочное устройство (28), выполненное с возможностью регулирования вождения транспортного средства,
блок (46) определения распределения, выполненный с возможностью определения показателей (VAR(a1), VAR(a2), VAR(а3)) распределения для ускорения на основании значений ускорения во множестве групп значений (a1, а2, а3) ускорения, причем каждая группа содержит значения ускорения, определяемые по соответствующим значениям скорости транспортного средства впереди в пределах одного из, по меньшей мере, двух диапазонов скорости, и
блок (48) классификации транспортных средств, выполненный с возможностью классифицирования (48) типов транспортных средств на основании показателей распределения и передачи данных, которые характеризуют целевое транспортное средство в форме классификационных данных (CL), которые соответствуют классификации.
11. Устройство (18) по п.10, в котором блок (48) классификации транспортных средств выполнен с возможностью сравнения каждого показателя распределения с, по меньшей мере, одним пороговым значением и определения класса транспортного средства комбинированием результатов соответствующих сравнений.
12. Устройство (18) по п.10 или 11, в котором комбинирование влечет за собой придание большего веса показателю распределения, рассчитанному для более высокого диапазона скоростей, чем рассчитанному для более низкого диапазона скоростей.
13. Устройство (18) по п.10, в котором комбинирование влечет за собой придание большего веса показателю распределения, основанному на многих значениях ускорения, чем основанному на меньшем количестве значений ускорения.
14. Устройство (18) по п.10, в котором блок классификации транспортных средств также выполнен с возможностью расчета вероятности, что классификация верна, на основании различных показателей распределения.
15. Устройство (18) по п.10, в котором блок (26) обработки значений ускорения содержит:
блок (62) определения уклона, выполненный с возможностью определения, находится ли целевое транспортное средство на спуске, и
блок (66) определения постоянной аэродинамического сопротивления, выполненный с возможностью определения постоянной (С) аэродинамического сопротивления для целевого транспортного средства на основании значений (а) ускорения, собранных, когда целевое транспортное средство находится на спуске, и передачи данных, которые характеризуют целевое транспортное средство, содержащих постоянную (С) аэродинамического сопротивления.
16. Устройство (18) по п.15, в котором блок (62) определения уклона также выполнен с возможностью определения, находится ли целевое транспортное средство на подъеме, и дополнительно содержит блок (64) определения тяговой мощности, выполненный с возможностью определения данных (FM/m), соответствующих максимальной тяговой мощности (FM) целевого транспортного средства, на основании значений ускорения, собранных, когда целевое транспортное средство находится на подъеме, и передачи данных, которые характеризуют целевое транспортное средство, содержащих указанные данные (FM/m), соответствующие максимальной тяговой мощности (FM) целевого транспортного средства.
17. Устройство (18) по п.16, в котором блок определения тяговой мощности также выполнен с возможностью определения данных (FM/m), соответствующих максимальной тяговой мощности (FM) целевого транспортного средства, на основании постоянной (С) аэродинамического сопротивления.
18. Устройство (18) по п.15, в котором блок (62) определения уклона также выполнен с возможностью определения угла (α) наклона уклона для использования угла наклона при обработке значений ускорения, которая выполняется по отношению к такому уклону.
19. Устройство (18) по п.10, дополнительно содержащее датчик (16) расстояния для определения значений расстояния между транспортным средством и целевым транспортным средством и выдачи входных значений, которые являются зависящими от значений расстояния.
20. Устройство (18) по п.10, дополнительно содержащее регулировочное устройство (28), выполненное с возможностью регулирования вождения транспортного средства.
21. Моторное транспортное средство (10), содержащее
датчик (16) расстояния для определения значений (d) расстояния между транспортным средством (10) и целевым транспортным средством (14) и выдачи входных значений (Δv), которые являются зависящими от значений расстояния, регулировочное устройство (28), выполненное с возможностью регулирования вождения транспортного средства, и устройство (18) для поддержания стратегии регулирования для вождения транспортного средства по любому из пп.10-20.
| US 2004030499 A1, 12.02.2004 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| DE 10116277 A1, 02.10.2002 | |||
| УСТРОЙСТВО СЛЕДЯЩЕГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ АВТОМОБИЛЯ | 1999 |
|
RU2161814C1 |

