Изобретение относится к области управления движением транспортных средств и предназначено для автоматического управления продольным движением автомобиля в условиях городского насыщенного транспортного потока.
Наиболее выделяющейся особенностью современного транспорта является коллективный характер движения. В разной степени это свойственно всем видам транспорта, но в наивысшей проявляется на сухопутных транспортных магистралях, где нередко принимает форму насыщенного потока с предельными (особенно в городских условиях) значениями интенсивности, динамичности движения и минимальными расстояния между автомобилями, зачастую составляющими единицы метров.
При всем совершенстве современных автомобилей, главным элементом, предотвращающим их столкновение, является человек-водитель, выполняющий роль наиболее ответственного звена следящей системы управления автомобилем. Индивидуальность и определенная ограниченность психофизических качеств человека являются причиной неполной адекватности его реакции на состояние насыщенного потока с предельными (особенно в городских условиях) значениями интенсивности, динамичности и минимальными расстояния между автомобилями и, как следствие, даже незначительные ошибки слежения приводят к авариям на городских транспортных магистралях. В частности, водитель автомобиля, движущегося в потоке, не в состоянии зарегистрировать вовремя (на начальной стадии) возникающие изменения скорости и режима работы двигательно-тормозной системы впереди едущего транспортного средства непосредственно своими органами чувств, что приводит к запаздыванию его действий [1, стр. 38-43]. В связи с этим, становится актуальной проблема создания устройства следящего управления продольным движением автомобиля, наиболее полно компенсирующего в соответствующей части несовершенство субъективного психофизического фактора, позволяющего уменьшить ошибки слежения и снизить число аварий в насыщенном потоке с предельными (особенно в городских условиях) значениями интенсивности, динамичности движения и минимальными расстояния между автомобилями.
Известен способ и устройство [2] для автоматического регулирования скорости движения автомобиля и расстояния, отделяющего его от впереди едущего автомобиля, содержащее регулятор скорости движения автомобиля с заданной скоростью при отсутствии в зоне обнаружения впереди едущего автомобиля; регулятор интервала для поддержания задаваемой дистанции между автомобилем и впереди едущим в зоне обнаружения автомобилем; средство установления начала изменения пути движения автомобиля; регулятор уменьшения величины задаваемой дистанции при переходе автомобиля на левую полосу движения; регулятор ограничения предельной величины ускорения автомобиля при последующем переходе на правую полосу движения при отсутствии в зоне обнаружения впереди едущего автомобиля. Кроме того, автомобиль оснащен средством определения расстояния до впереди едущего автомобиля.
Основным недостатком рассматриваемого устройства является большая величина ошибок слежения по положению (отклонение от задаваемой дистанции расстояния между автомобилем и впереди едущим транспортным средством в направлении пути следования во время активизации режима слежения). Это обусловлено тем, что в рассматриваемом устройстве-аналоге на интервалах времени, когда осуществляется режим слежения, т.е. поддержание задаваемой дистанции между автомобилем и впереди едущим транспортным средством, реализована наиболее простая схема слежения, в которой управление двигательно-тормозной системой автомобиля формируется только на основе данных об отклонении от задаваемой дистанции расстояния между автомобилем и впереди едущим транспортным средством, т.е. не используется более полное управление двигательно-тормозной системой автомобиля, формируемое с привлечением дополнительных данных, таких, например, как скорость автомобиля относительно впереди едущего транспортного средства и величина, равная сумме ускорения впереди едущего транспортного средства и удельных (нормированных к собственной массе автомобиля) сил сопротивления качению и воздуху автомобиля.
Следовательно, данное устройство-аналог для автоматического регулирования скорости движения автомобиля и расстояния, отделяющего его от впереди едущего автомобиля, по причине больших ошибок слежения не может быть использовано для следящего управления продольным движением автомобиля в насыщенном потоке с предельными значениями интенсивности, динамичности движения и минимальными расстояниями между автомобилями.
Известен также способ и устройство следящего управления для автомобиля [3], содержащее измеритель расстояния, измеряющий расстояние между автомобилем и едущим впереди транспортным средством, измеритель относительной скорости, измеряющий относительную скорость между автомобилем и едущим впереди транспортным средством, блок управления, который на основании выходных величин измерителей расстояния и относительной скорости управляет выходной мощностью двигателя внутреннего сгорания автомобиля при разгоне автомобиля с места с учетом относительной скорости и независимо от расстояния таким образом, что относительная скорость становится нулевой, если измеренное измерителем расстояние не достигает заранее определенного опорного значения. Управление выходной мощностью двигателя осуществляется на основе относительной скорости и расстояния, когда последнее, по меньшей мере, сравняется с опорным (задаваемым) значением дистанции.
Недостатком такого устройства-аналога являются большие ошибки слежения по положению, обусловленные тем, что для формирования управления двигателем автомобиля учитываются не все параметры движения; например, не учитывается величина, равная сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля, что не позволяет реализовать управление в более полном виде и снизить ошибки слежения по положению.
Таким образом, данное устройство-аналог следящего управления для автомобиля по причине больших ошибок слежения по положению также не может быть использовано для следящего управления продольным движением автомобиля в насыщенном потоке с предельными значениями интенсивности, динамичности движения и минимальными расстояниями между автомобилями.
Известное устройство-аналог следящего управления для автомобиля [3] по своей технической сущности, функциональному назначению и достигаемому техническому результату является наиболее близким к заявляемому изобретению на устройство следящего управления продольным движением автомобиля и рассматривается в дальнейшем в качестве устройства-прототипа.
В основу изобретения положена задача создания устройства следящего управления продольным движением автомобиля, позволяющего снизить ошибки слежения по положению между автомобилем и впереди едущим транспортным средством, осуществляющего следящее управление продольным движением автомобиля на основе данных об отклонении от опорной дистанции измеренного расстояния между автомобилем и впереди едущим транспортным средством, о величине измеренной относительной скорости между автомобилем и впереди едущим транспортным средством и, кроме того, на основе данных, полученных оценкой (определение с помощью специальных приемов, не связанных с прямыми измерениями, приближенного значения величины) величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля.
Поставленная задача решается тем, что в устройство следящего управления продольным движением автомобиля, содержащее измерители относительной скорости и расстояния, задатчик опорной дистанции, формирователь разности измеренного расстояния и опорной дистанции, блок управления, при этом измеритель расстояния и задатчик опорной дистанции подключены ко входам формирователя разности измеренного расстояния и опорной дистанции, выход которого подключен ко входу блока управления, к другому входу которого подключен измеритель относительной скорости, выход блока управления предназначен для подачи сигнала управления на двигательно-тормозную систему автомобиля, дополнительно включены четыре интегратора, три формирователя разности, четыре сумматора, восемь усилителей и датчик удельной силы, развиваемой двигательно-тормозной системой автомобиля, при этом входы усилителей с нечетными номерами подключены к выходу первого формирователя разности, а входы усилителей с четными номерами подключены к выходу второго формирователя разности, выходы первого и второго, третьего и четвертого, пятого и шестого, седьмого и восьмого усилителей подключены попарно к первому и второму входам первого, второго, третьего и четвертого сумматоров, соответственно, кроме того, выход первого сумматора подключен ко входу первого интегратора, выход которого подключен к третьему входу второго сумматора, выход второго сумматора подключен ко входу второго интегратора, выход которого подключен к первому входу третьего формирователя разности и входу блока управления одновременно, выходы третьего и четвертого сумматоров подключены соответственно ко входам третьего и четвертого интеграторов, выходы которых соответственно подключены к первым входам первого и второго формирователей разности, одновременно выход четвертого интегратора подключен к третьему входу третьего сумматора, вход датчика удельной силы подключен к двигательно-тормозной системе автомобиля, а выход датчика удельной силы подключен ко второму входу третьего формирователя разности, выход которого подключен к третьему входу четвертого сумматора, кроме того, ко второму входу первого формирователя разности подключен выход формирователя разности измеренного расстояния и опорной дистанции, ко второму входу второго формирователя разности подключен выход измерителя относительной скорости.
В заявленном устройстве следящего управления продольным движением автомобиля общими существенными признаками для него и для его прототипа являются:
- наличие конструктивных элементов в виде измерителей расстояния и относительной скорости, задатчика опорной дистанции, формирователя разности измеренного расстояния и опорной дистанции, блока управления;
- наличие связей между измерителем расстояния, задатчиком опорной дистанции и формирователем разности измеренного расстояния и опорной дистанции; между измерителем относительной скорости, формирователя разности измеренного расстояния и опорной дистанции и блоком управления, а также связей между блоком управления и самой двигательно-тормозной системой автомобиля.
Сопоставительный анализ существенных признаков заявленного устройства и прототипа показывает, что первый, в отличие от прототипа, имеет следующие существенные отличительные признаки:
- наличие конструктивных элементов в виде четырех интеграторов, четырех сумматоров, трех формирователей разности, восьми усилителей и датчика удельной силы;
- наличие связей интеграторов, сумматоров, формирователей разности, усилителей и датчика удельной силы между собой, а также с формирователем разности измеренного расстояния и опорной дистанции, с измерителем относительной скорости и блоком управления, а также связи датчика удельной силы с двигательно-тормозной системой управляемого автомобиля.
Совокупность признаков, обеспечивающих достижение технического результата:
- наличие конструктивных элементов в виде измерителей дистанции и относительной скорости, задатчика опорной дистанции, формирователя разности измеренного расстояния и опорной дистанции, четырех интеграторов, четырех сумматоров, трех формирователей разности, восьми усилителей, датчика удельной силы и блока управления;
- наличие связей интеграторов, сумматоров, формирователей разности, усилителей, блока управления, задатчика опорной дистанции и датчика удельной силы между собой и с измерителями расстояния и относительной скорости, а также связи датчика удельной силы с двигательно-тормозной системой автомобиля.
Технический результат от применения заявленного устройства следящего управления продольным движением автомобиля заключается в снижении ошибок слежения по положению, возникающих при слежении автомобиля за впереди едущим транспортным средством.
Данная совокупность известных и отличительных существенных признаков обеспечивает получение технического результата.
Именно такая совокупность всех существенных признаков позволила создать устройство следящего управления продольным движением автомобиля.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решить поставленную задачу.
Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем, т. е. оно явным образом не следует из уровня техники и пригодно для промышленного применения.
Сущность заявленного устройства следящего управления продольным движением автомобиля поясняется чертежами:
фиг. 1 - блок-схема устройства следящего управления продольным движением автомобиля; фиг. 2 - развернутая блок-схема устройства следящего управления продольным движением автомобиля; фиг. 3 - функциональная блок-схема устройства следящего управления продольным движением автомобиля; фиг. 4 - диаграмма зависимости среднеквадратичного значения ошибки слежения от величины постоянной времени оценивания; фиг. 5 - диаграмма зависимости среднеквадратичного значения ошибки слежения от величины весового коэффициента m, фиг. 6 - диаграмма линий уровня нормы матрицы функционала качества управления; фиг. 7 - временные диаграммы ошибки слежения по положению при применении прототипа и заявленного устройства для ситуации умеренной динамики потока автомобилей; фиг. 8 - временные диаграммы расстояния между автомобилем и впереди едущим транспортным средством при экстренной остановке последнего (наезд на препятствие).
Заявленное устройство (фиг. 1) состоит из измерителя расстояния 1, задатчика опорной дистанции 2, измерителя относительной скорости 3, формирователя разности измеренного расстояния и опорной дистанции 4, блока оценивания 5, блока управления 6 и датчика удельной силы 7. На фиг. 1 показан также объект управления - двигательно-тормозная система автомобиля 8.
Измеритель расстояния 1 выполняет измерение расстояния Zr - между автомобилем и впереди едущим транспортным средством. Задатчик опорной дистанции 2 задает опорное значение дистанции Rо между автомобилем и впереди едущим транспортным средством, которое выдерживается автомобилем при помощи установленного на нем заявленного устройства следящего управления продольным движением автомобиля. Измеритель относительной скорости 3 измеряет относительную скорость ZV движения автомобиля относительно впереди едущего транспортного средства. Формирователь разности измеренного расстояния и опорной дистанции 4 формирует на своем выходе величину Zr-Rо, пропорциональную отклонению измеренного расстояния Zr от опорной дистанции Rо. Блок оценивания 5 формирует оценку  (знак "^" над переменными служит для обозначения их оценок, т.е. приближенного значения) величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля. Блок управления 6 формирует управление W двигательно-тормозной системой автомобиля на основе данных о величине измеренной относительной скорости, отклонения измеренного расстояния от опорной дистанции, а также на основе оценки величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля. Датчик удельной силы 7 измеряет величину удельной (на единицу массы автомобиля) силы u, развиваемой двигательно-тормозной системой автомобиля.
(знак "^" над переменными служит для обозначения их оценок, т.е. приближенного значения) величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля. Блок управления 6 формирует управление W двигательно-тормозной системой автомобиля на основе данных о величине измеренной относительной скорости, отклонения измеренного расстояния от опорной дистанции, а также на основе оценки величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля. Датчик удельной силы 7 измеряет величину удельной (на единицу массы автомобиля) силы u, развиваемой двигательно-тормозной системой автомобиля.
Функционирование заявленного устройства управления продольным движением автомобиля обеспечивают связи формирователя разности измеренного расстояния и опорной дистанции 4 и измерителя относительной скорости 3 с блоком оценивания 5, в котором производится формирование оценки  величины, равной сумме ускорения ведущего автомобиля и удельных сил сопротивления качению и воздуху ведомого, управляемого автомобиля. В свою очередь формирователь разности измеренного расстояния и опорной дистанции 4 на своем выходе формирует величину Zr-Rо, равную отклонению расстояния между автомобилем и впереди едущим транспортным средством от опорной дистанции между ними на основе данных, поступающих от измерителя расстояния 1 и задатчика опорной дистанции 2. От формирователя разности измеренного расстояния и опорной дистанции 4 и измерителя относительной скорости 3, а также от блока оценивания 5 в блок управления 6 направляются для формирования управления двигательно-тормозной системой автомобиля текущие данные о величине относительной скорости ZV, об отклонении расстояния между автомобилем и впереди едущим транспортным средством от опорной дистанции Zr-Rо а также об оцененной величине
величины, равной сумме ускорения ведущего автомобиля и удельных сил сопротивления качению и воздуху ведомого, управляемого автомобиля. В свою очередь формирователь разности измеренного расстояния и опорной дистанции 4 на своем выходе формирует величину Zr-Rо, равную отклонению расстояния между автомобилем и впереди едущим транспортным средством от опорной дистанции между ними на основе данных, поступающих от измерителя расстояния 1 и задатчика опорной дистанции 2. От формирователя разности измеренного расстояния и опорной дистанции 4 и измерителя относительной скорости 3, а также от блока оценивания 5 в блок управления 6 направляются для формирования управления двигательно-тормозной системой автомобиля текущие данные о величине относительной скорости ZV, об отклонении расстояния между автомобилем и впереди едущим транспортным средством от опорной дистанции Zr-Rо а также об оцененной величине  Связь датчика удельной силы 7 обеспечивает поступление в блок оценивания 5 текущих данных о величине удельной силы u, развиваемой двигательно-тормозной системой автомобиля.
Связь датчика удельной силы 7 обеспечивает поступление в блок оценивания 5 текущих данных о величине удельной силы u, развиваемой двигательно-тормозной системой автомобиля.
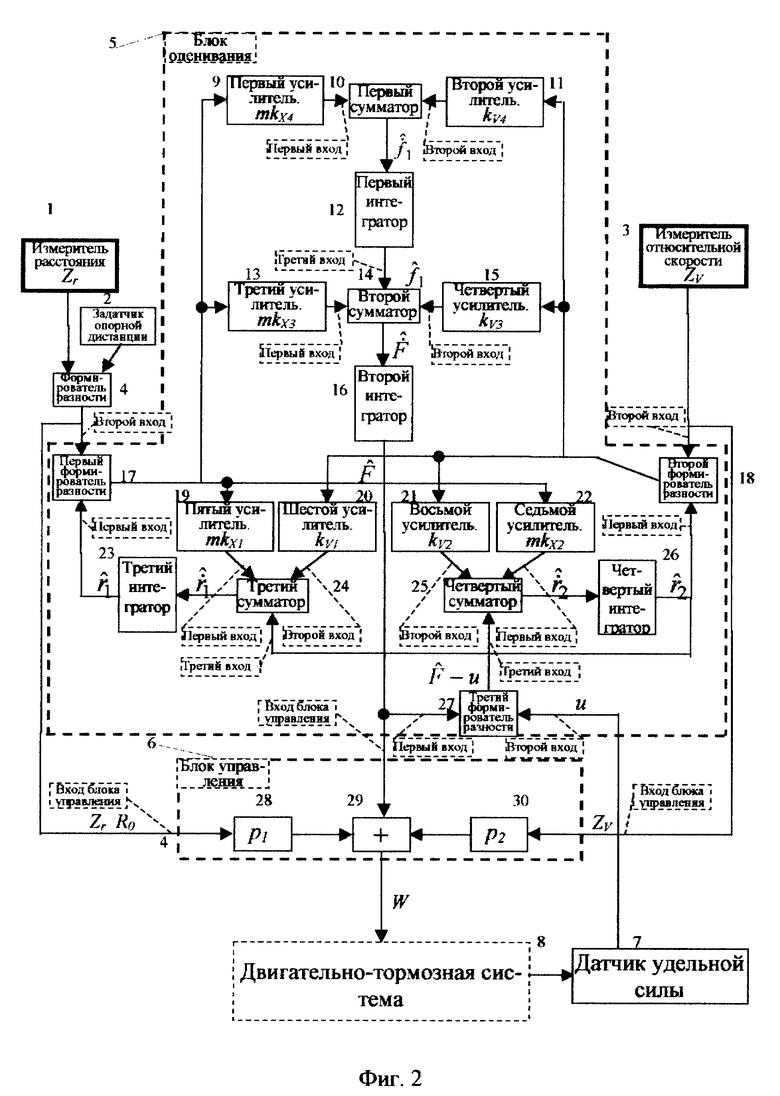
В развернутом виде (фиг. 2) заявленное устройство следящего управления продольным движением автомобиля состоит из измерителей расстояния 1 и относительной скорости 3; задатчика опорной дистанции 2; формирователя разности измеренного расстояния и опорной дистанции 4; первого 9, третьего 13, пятого 19, седьмого 22 усилителей электрических сигналов с коэффициентами усиления mkX4, mkX3, mkX1 и mkX2, соответственно; второго 11, четвертого 15, шестого 20, восьмого 21 усилителей электрических сигналов с коэффициентами усиления kV4, kV3, kV1 и kV2, соответственно; первого 12, второго 16, третьего 23, четвертого 26 интеграторов электрических сигналов; первого 10, второго 14, третьего 24, четвертого 25 сумматоров и сумматора 29; первого 17, второго 18, третьего 27 формирователей разности и формирователя разности измеренного расстояния и опорной дистанции 4; усилителей электрических сигналов 28, 30 с коэффициентами усиления p1, p2, соответственно; датчика удельной силы 7, развиваемой двигательно-тормозной системой автомобиля.
Заявленное устройство следящего управления продольным движением автомобиля в более детальном изложении применительно к развернутой блок-схеме устройства следящего управления продольным движением автомобиля (фиг. 2) работает следующим образом: измерители расстояния 1 и относительной скорости 3 измеряют расстояние Zr и относительную скорость ZV между автомобилем и впереди едущим транспортным средством, а после сравнения измеренного расстояния Zr в формирователе разности 4 с опорным значением дистанции Rо вырабатываемым задатчиком опорной дистанции 2, на выходе формирователя разности измеренного расстояния и опорной дистанции 4 вырабатываются электрические сигналы, пропорциональные отклонению Zr-Rо измеренного расстояния от опорной дистанции. Текущие данные об относительной скорости ZV и отклонении Zr-Rо измеренного расстояния от опорной дистанции направляются в блок оценивания 5 на вторые входы второго 18 и первого 17 формирователей разности, соответственно, а через усилители 30 и 28 - в сумматор 29 блока управления 6, в котором управление W формируется как сумма величин, пропорциональных относительной скорости ZV и отклонению Zr-Rо измеренного расстояния от опорной дистанции. На выходе первого формирователя разности 17 формируется разность  измеренного Zr-Rо (от формирователя разности измеренного расстояния и опорной дистанции 4) и оцененного
измеренного Zr-Rо (от формирователя разности измеренного расстояния и опорной дистанции 4) и оцененного  (от третьего интегратора 23) отклонений расстояния от опорной дистанции, а на выходе второго формирователя разности 18 формируется разность измеренной ZV (от измерителя скорости 3) и оцененной
(от третьего интегратора 23) отклонений расстояния от опорной дистанции, а на выходе второго формирователя разности 18 формируется разность измеренной ZV (от измерителя скорости 3) и оцененной  (от четвертого интегратора 26) величин относительной скорости. С выхода первого 17 и второго 18 формирователей разности сигналы через первый 9, третий 13, пятый 19, седьмой 22 усилители и второй 11, четвертый 15, шестой 20, восьмой 21 усилители, соответственно, поступают на первый 10, второй 14, третий 24, четвертый 25 сумматоры, с выхода которых направляются на входы первого 12, второго 16, третьего 23, четвертого 26 интеграторов, соответственно. На выходах первого 10, второго 14, третьего 24, четвертого 25 сумматоров формируются данные о скорости изменения величины
(от четвертого интегратора 26) величин относительной скорости. С выхода первого 17 и второго 18 формирователей разности сигналы через первый 9, третий 13, пятый 19, седьмой 22 усилители и второй 11, четвертый 15, шестой 20, восьмой 21 усилители, соответственно, поступают на первый 10, второй 14, третий 24, четвертый 25 сумматоры, с выхода которых направляются на входы первого 12, второго 16, третьего 23, четвертого 26 интеграторов, соответственно. На выходах первого 10, второго 14, третьего 24, четвертого 25 сумматоров формируются данные о скорости изменения величины  производная от
производная от  оценки величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля), о скорости изменения величины
оценки величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля), о скорости изменения величины  оценка величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля), о скорости изменения величины
оценка величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля), о скорости изменения величины  оценка отклонения измеренного расстояния от опорной дистанции), о скорости изменения величины
оценка отклонения измеренного расстояния от опорной дистанции), о скорости изменения величины  оценка относительной скорости), соответственно. Все это позволяет на выходе второго интегратора 16 сформировать оценку
оценка относительной скорости), соответственно. Все это позволяет на выходе второго интегратора 16 сформировать оценку  величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля, которая направляется в блок управления 6 (на сумматор 29) для формирования дополнительного слагаемого управления двигательно-тормозной системой автомобиля. Данные о величине удельной силы u, развиваемой двигательно-тормозной системой автомобиля, с помощью датчика удельной силы 7 направляются в блок оценивания 5 на второй вход третьего формирователя разности 27, на первый вход которого поступают данные об оцененной величине
величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля, которая направляется в блок управления 6 (на сумматор 29) для формирования дополнительного слагаемого управления двигательно-тормозной системой автомобиля. Данные о величине удельной силы u, развиваемой двигательно-тормозной системой автомобиля, с помощью датчика удельной силы 7 направляются в блок оценивания 5 на второй вход третьего формирователя разности 27, на первый вход которого поступают данные об оцененной величине  равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля. Полученная на выходе третьего формирователя разности 27 разность
равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля. Полученная на выходе третьего формирователя разности 27 разность  поступает на третий вход четвертого сумматора 25 для корректировки оцененной величины скорости изменения относительной скорости
поступает на третий вход четвертого сумматора 25 для корректировки оцененной величины скорости изменения относительной скорости  автомобиля, которая после интегрирования в четвертом интеграторе 26 поступает одновременно на первый вход второго формирователя разности 18 и на третий вход третьего сумматора 24 для коррекции скорости изменения оценки
автомобиля, которая после интегрирования в четвертом интеграторе 26 поступает одновременно на первый вход второго формирователя разности 18 и на третий вход третьего сумматора 24 для коррекции скорости изменения оценки  отклонения измеренного расстояния от опорной дистанции. При этом, если данные о расстоянии и относительной скорости между автомобилем и впереди едущим транспортным средством получаются непосредственно путем измерений указанных величин, то данные о величине, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля, вырабатываются с помощью блока оценивания 5, не требующего дополнительных измерений.
отклонения измеренного расстояния от опорной дистанции. При этом, если данные о расстоянии и относительной скорости между автомобилем и впереди едущим транспортным средством получаются непосредственно путем измерений указанных величин, то данные о величине, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля, вырабатываются с помощью блока оценивания 5, не требующего дополнительных измерений.
Таким образом, заявленное устройство осуществляет выработку управления двигательно-тормозной системой автомобиля на основе данных об отклонении измеренного расстояния от опорной дистанции, данных измерения относительной скорости и данных оценки величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля.
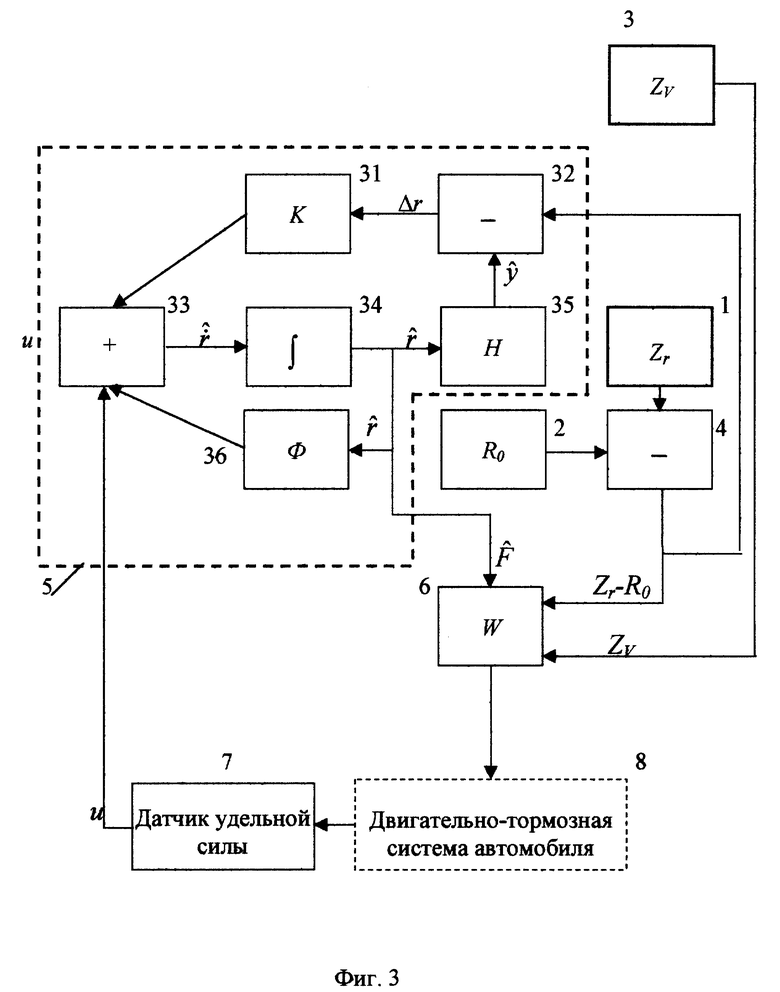
Функциональная блок-схема заявленного устройства следящего управления продольным движением автомобиля представлена на фиг. 3. Основной составной частью заявленного устройства является блок оценивания 5, который содержит усилитель 31, формирователь разности 32, сумматор 33, интегратор 34, усилитель 35, усилитель 36. Элементы блока оценивания 5, представленные на фиг. 3, являются многоканальными. Так, усилитель 31 эквивалентно представляет первый 9 (фиг. 2), второй 11, третий 13, четвертый 15, пятый 19, шестой 20, седьмой 22, восьмой 21 усилители; формирователь разности 32 (фиг. 3) эквивалентно представляет первый 17 (фиг. 2)и второй 18 формирователи разности; сумматор 33 (фиг. 3) эквивалентно представляет первый 10 (фиг. 2), второй 14, третий 24, четвертый 25 сумматоры; интегратор 34 (фиг. 3) эквивалентно представляет первый 12 (фиг. 2), второй 16, третий 23, четвертый 26 интеграторы; многоканальность усилителя (с коэффициентами усиления, равными единице) 35 (фиг. 3) выражается в том, что на вход формирователя разности 32 подаются сигналы от третьего 23 (фиг. 2) и четвертого 26 интеграторов и, наконец, многоканальность усилителя (с коэффициентами усиления равными единице) 36 (фиг. 3) выражается в структуре соединения элементов интегратора 34 и сумматора 33 между собой. Кроме блока оценивания 5, на функциональной блок-схеме изображены элементы 1,2, 3,4, 5, 6, 7 и 8, назначение которых соответствует блок-схемам (фиг. 1 и 2).
Функциональная блок-схема (фиг. 3) позволяет рассматривать работу элементов обратной связи заявленного устройства следящего управления продольным движением автомобиля. Из функциональной блок-схемы следует, что в формирователе разности 32 производится сравнение измеряемого вектора (Zr - Rо, ZV)T с оцененным вектором состояния на выходе системы 
где Zr= R1-R2+εr - измеренное расстояние; ZV= r2+εV - измеренная относительная скорость; r1 = R1-R2-Rо - отклонение расстояния R1-R2 от опорной дистанции Rо, R1 - положение (координата на траектории движения) впереди едущего транспортного средства; R2 - положение (координата на траектории движения) автомобиля; Rо - опорная дистанция;  относительная скорость; εr и εV - инструментальные погрешности измерителей расстояния и относительной скорости, соответственно;
относительная скорость; εr и εV - инструментальные погрешности измерителей расстояния и относительной скорости, соответственно;  оценки величин r1, r2, соответственно.
оценки величин r1, r2, соответственно.
Вектор состояния системы r = (r1, r2, F, f1)T имеет свои производную  и оценку
и оценку 
где  оценка величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля;
оценка величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля;  скорость изменения величины
скорость изменения величины 
Полученная разность векторов  (разность измеренных и оцененных в блоке оценивания 5 отклонений расстояния от опорной дистанции и относительной скорости) через матрицу обратной связи K (усилитель 31) поступает для коррекции оцениваемых величин на вход сумматора 33. С выхода интегратора 34 сигнал через матриц динамики системы Ф (усилитель 36) направляется на вход сумматора 33. Матрица динамики системы Ф отражает структуру уравнений, описывающих систему "автомобиль - впереди едущее транспортное средство", что отображается в структуре соединения элементов интегратора 34 и сумматора 33 между собой. Через матрицу вектора выхода H (усилитель 35) оценка вектора состояния
(разность измеренных и оцененных в блоке оценивания 5 отклонений расстояния от опорной дистанции и относительной скорости) через матрицу обратной связи K (усилитель 31) поступает для коррекции оцениваемых величин на вход сумматора 33. С выхода интегратора 34 сигнал через матриц динамики системы Ф (усилитель 36) направляется на вход сумматора 33. Матрица динамики системы Ф отражает структуру уравнений, описывающих систему "автомобиль - впереди едущее транспортное средство", что отображается в структуре соединения элементов интегратора 34 и сумматора 33 между собой. Через матрицу вектора выхода H (усилитель 35) оценка вектора состояния  поступает в виде вектора выхода
поступает в виде вектора выхода  на вход формирователя разности 32 для сравнения с измерениями ZV и Zr-Rо.
на вход формирователя разности 32 для сравнения с измерениями ZV и Zr-Rо.
Рассмотрим два основных режима работы заявленного устройства.
Пусть величина элемента Zr вектора измерений Z = (Zr, ZV)T в какой-то момент времени уменьшается относительно опорной дистанции Rо за счет замедления движения впереди едущего транспортного средства, т.е. за счет уменьшения относительной скорости ZV; тогда полученные на выходе формирователя разности 32 уменьшающиеся отрицательные значения элементов вектора Δr через усилитель 31 поступают на вход сумматора 33, что приводит к уменьшению элементов вектора  после интегрирования в интеграторе 34, и к уменьшению элементов вектора
после интегрирования в интеграторе 34, и к уменьшению элементов вектора  Так как в оцененный вектор состояния
Так как в оцененный вектор состояния  входит, кроме элементов
входит, кроме элементов  , еще и элемент
, еще и элемент  являющийся оценкой величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля, то уменьшается также и величина
являющийся оценкой величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля, то уменьшается также и величина  В целом это приводит к уменьшению величины управления
В целом это приводит к уменьшению величины управления  (блок 6), а затем и удельной силы u, развиваемой двигательно-тормозной системой автомобиля 8, т.е. - к замедлению движения автомобиля и восстановлению расстояния Zr, близкого к опорной дистанции Rо. В свою очередь уменьшающееся значение удельной силы u, которое поступает на вход сумматора 33, приводит к дополнительному уменьшению величины
(блок 6), а затем и удельной силы u, развиваемой двигательно-тормозной системой автомобиля 8, т.е. - к замедлению движения автомобиля и восстановлению расстояния Zr, близкого к опорной дистанции Rо. В свою очередь уменьшающееся значение удельной силы u, которое поступает на вход сумматора 33, приводит к дополнительному уменьшению величины  а следовательно, к дополнительному уменьшению величины управления W, что затем приводит к дополнительному увеличению замедления автомобиля и к дополнительному восстановлению расстояния Zr, еще более близкого к опорной дистанции Rо и т.д. В результате указанных процессов уменьшающаяся величина удельной силы u, развиваемой двигательно-тормозной системой автомобиля, приводит к замедлению его движения и восстановлению расстояния Zr до заданной величины опорной дистанции Rо.
а следовательно, к дополнительному уменьшению величины управления W, что затем приводит к дополнительному увеличению замедления автомобиля и к дополнительному восстановлению расстояния Zr, еще более близкого к опорной дистанции Rо и т.д. В результате указанных процессов уменьшающаяся величина удельной силы u, развиваемой двигательно-тормозной системой автомобиля, приводит к замедлению его движения и восстановлению расстояния Zr до заданной величины опорной дистанции Rо.
Рассмотрим второй режим работы заявленного устройства.
Пусть величина элемента Zr вектора измерений Z = (Zr, ZV)T в какой-то момент времени увеличивается относительно опорной дистанции Rо за счет увеличения скорости движения впереди едущего транспортного средства, т.е. за счет увеличения относительной скорости ZV; тогда полученные на выходе формирователя разности 32 увеличивающиеся положительные значения элементов вектора Δr через усилитель 31 поступают на вход сумматора 33, что приводит к увеличению элементов вектора  после интегрирования в интеграторе 34, и к увеличению элементов вектора состояния
после интегрирования в интеграторе 34, и к увеличению элементов вектора состояния  Так как в оцененный вектор состояния
Так как в оцененный вектор состояния  входит, кроме элементов
входит, кроме элементов  , еще и элемент
, еще и элемент  являющийся оценкой величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля, то увеличивается также и величина
являющийся оценкой величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля, то увеличивается также и величина  Все это приводит к возрастанию величины управления
Все это приводит к возрастанию величины управления  (блок управления 6), а затем и удельной силы u, развиваемой двигательно-тормозной системой автомобиля 8, т.е. - к ускорению движения автомобиля и восстановлению расстояния Zr, близкого к опорной дистанции Rо. В свою очередь увеличивающееся значение силы u, которое поступает на вход сумматора 33, приводит к дополнительному возрастанию величины
(блок управления 6), а затем и удельной силы u, развиваемой двигательно-тормозной системой автомобиля 8, т.е. - к ускорению движения автомобиля и восстановлению расстояния Zr, близкого к опорной дистанции Rо. В свою очередь увеличивающееся значение силы u, которое поступает на вход сумматора 33, приводит к дополнительному возрастанию величины  а следовательно, к дополнительному возрастанию величины управления W, что затем приводит к дополнительному увеличению скорости автомобиля и к дополнительному восстановлению расстояния Zr еще более близкого к опорной дистанции Rо и т.д. В результате указанных процессов увеличивающаяся удельная сила u, развиваемая двигательно-тормозной системой автомобиля, приводит к ускорению его движения и восстановлению расстояния Zк до заданной величины опорной дистанции Rо.
а следовательно, к дополнительному возрастанию величины управления W, что затем приводит к дополнительному увеличению скорости автомобиля и к дополнительному восстановлению расстояния Zr еще более близкого к опорной дистанции Rо и т.д. В результате указанных процессов увеличивающаяся удельная сила u, развиваемая двигательно-тормозной системой автомобиля, приводит к ускорению его движения и восстановлению расстояния Zк до заданной величины опорной дистанции Rо.
Следовательно, в заявленном устройстве формируется оцененный вектор состояния  (включая компоненту
(включая компоненту  ), который изменяется в соответствии с изменениями элементов вектора измерения Z = (Zr, ZV)T. Выработанная в заявленном устройстве оцененная величина
), который изменяется в соответствии с изменениями элементов вектора измерения Z = (Zr, ZV)T. Выработанная в заявленном устройстве оцененная величина  наряду с Zr и ZV используется для формирования управления W, что обуславливает у заявленного устройства свойства следящего управления продольным движением автомобиля.
наряду с Zr и ZV используется для формирования управления W, что обуславливает у заявленного устройства свойства следящего управления продольным движением автомобиля.
Таким образом, в сравнении с прототипом заявленное устройство содержит в управлении W дополнительную компоненту  которая обеспечивает снижение ошибок слежения.
которая обеспечивает снижение ошибок слежения.
Величины параметров элементов (фиг. 3) непосредственно влияют на значения ошибок слежения. Так величины элементов матрицы обратной связи K (усилитель 31) обуславливают динамические свойства оценивания, т.е. величину вектора  называемого вектором ошибки оценивания. Следовательно величины элементов матрицы обратной связи K влияют на точность определения оценки
называемого вектором ошибки оценивания. Следовательно величины элементов матрицы обратной связи K влияют на точность определения оценки  по отношению к величине F. Применение порядка выбора элементов матрицы обратной связи K, приведенного в приложении 1, минимизирует ошибки слежения, реализуемые заявленным устройством следящего управления продольным движением автомобиля.
по отношению к величине F. Применение порядка выбора элементов матрицы обратной связи K, приведенного в приложении 1, минимизирует ошибки слежения, реализуемые заявленным устройством следящего управления продольным движением автомобиля.
Для более детального описания работы заявленного устройства следящего управления продольным движением автомобиля обращаемся к аналитическим выражениям, описывающим протекающие в нем процессы.
Уравнения продольного движения автомобиля и впереди едущего транспортного средства в удельных силах (ускорениях) на единицу массы имеют вид:
где значения индекса i относятся соответственно к впереди едущему транспортному средству (i=1) и к автомобилю (i=2),
Fi - удельная сила i-го автомобиля.
Соотношение удельных сил, действующих на автомобиль, либо на впереди едущее транспортное средство, записываем в следующем виде [1, стр. 3-11]:,
Fi=(Di-Ti)-(Ai+Qi), i=1,2, (2)
где (Di-Ti) - удельная (нормированная к массе автомобиля (i=1) либо к массе впереди едущего транспортного средства (i=2)) сила, развиваемая его двигательно-тормозной системой;
Di - удельная (нормированная к массе автомобиля (i=1) либо к массе впереди едущего транспортного средства (i=2)) сила, развиваемая его двигательной системой;
Ti - удельная (нормированная к массе автомобиля (i=1) либо к массе впереди едущего транспортного средства (i=2)) сила, развиваемая его тормозной системой;
Ai - удельная (нормированная к массе автомобиля (i=1) либо к массе впереди едущего транспортного средства (i=2)) сила сопротивления воздуху (сила аэродинамического сопротивления);
Q - удельная (нормированная к массе автомобиля (i=1) либо к массе впереди едущего транспортного средства (i=2)) сила сопротивления качению; (Ai + Qi) - удельная (нормированная к массе автомобиля (i=1) либо к массе впереди едущего транспортного средства (i=2)) сила сопротивления качению и воздуху.
Учитывая, что в рассматриваемой задаче определяющее значение имеет относительное движение автомобиля по отношению к впереди едущему транспортному средству, записываем уравнение (1) в отклонениях от опорной дистанции Rо (вычитаем из первого уравнения системы (1) второе):
где r1 = R1-R2-Rо - компонента положения вектора состояния r,
F = F1+(A2 +Q2) - величина, равная сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля; u= D2-T2 - удельная сила, развиваемая двигательно-тормозной системой автомобиля; причем u- ≅ u ≅ u+, что отвечает физическим представлениям о конечной мощности, развиваемой двигательно-тормозной системой автомобиля,
где u- - минимальная предельная величина удельной силы u;
u+ - максимальная предельная величина удельной силы u.
Далее рассматриваем уравнения (1...3) в развернутом виде:


Из последнего уравнения следует, что ошибки слежения r1 = R1-R2-Rо по положению тем меньше, чем меньше правая часть этого уравнения, т.е. чем ближе величина удельной силы (D2 - T2) к величине F1 +(A2 + Q2), равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля. Это означает, что удельную силу (D2-T2) слезет формировать близкой по величине к F1 + (A2 + Q2). Однако величина F1 + (A2 + Q2) может быть непосредственно измерена, что требует применения других подходов к определению величины F1 +(A2 +Q2) Для разрешения данной задачи нами применено линейное оценивание [4, стр. 11-16], [5, стр. 258-275] . Это позволяет получать текущие значения величины F1 +(A2 +Q2) в виде ее оценки  на основе измерений расстояния Zr и относительной скорости ZV.
на основе измерений расстояния Zr и относительной скорости ZV.
Удельная сила u =D2-T2 реализуется в результате реакции двигательно-тормозной системы на управление W, которое сформировано на основе данных измерений относительной скорости и отклонения измеренного расстояния от опорной дистанции между автомобилем и впереди едущим транспортным средством, а также на основе оценки величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля.
Связь между удельной силой u и управлением W с учетом характерного времени (τd) запаздывания за счет инерционной реакции двигательно-тормозной системы на управление W представляем следующим образом:
Уравнения измерений соответственно имеют вид:
Zr= R1-R2+εr, (5)
ZV= r2+εV, (6)
где Zr и ZV - измеренные значения расстояния между автомобилем и впереди едущим транспортным средством и относительной скорости между автомобилем и впереди едущим транспортным средством;
r2 - точное значение относительной скорости;
εr и εV - инструментальные погрешности измерителей расстояния и относительной скорости, соответственно.
Анализ приведенных уравнений раскрывает сущность работы заявленного устройства и предусматривает освещение двух вопросов:
- определения силы  являющейся оценкой величины силы F, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля;
являющейся оценкой величины силы F, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля;
- формирования управления W как функции оцененной величины  измеренных отклонения расстояния Zr от опорной дистанции Rо и относительной скорости ZV.
измеренных отклонения расстояния Zr от опорной дистанции Rо и относительной скорости ZV.
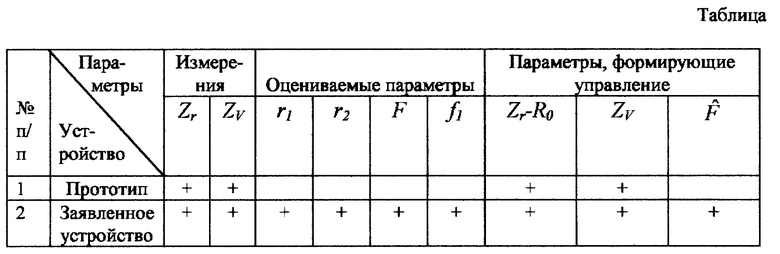
Для сравнения приводим перечень параметров, формирующих управление в прототипе и заявленном устройстве, см. таблицу. В устройстве-прототипе для формирования управления двигательно-тормозной системой используются только измерения типа Zr и ZV, в заявленном устройстве для формирования управления, кроме измерений типа Zr и ZV, используется дополнительно оцененная величина 
Для оценки величины F в каждой точке t0 временного интервала слежения нами принята аппроксимация указанной функции полиномом первой степени:
F=F0+f1(t-t0), F0=const, f1=const, t-t0= Δt→ ε,
или  F(t0)=F0,
F(t0)=F0, 
где ε - бесконечно малая величина.
Далее излагаем сущность процесса оценивания величины силы F, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля.
Для этого обращаемся к матричному уравнению, реализующему процесс линейного оценивания в общем виде [4, стр. 15), [5, стр. 275], (фиг. 3):

для которого нами разработана конкретная система уравнений, реализованная в блоке оценивания 5 (фиг. 1,2,3), позволяющая получать оценку величины силы F, в следующем виде:
где  оценка вектора состояния;
оценка вектора состояния;
Z = (Zr, ZV)T - вектор измерений;
U = bu - вектор удельной силы, развиваемой двигательно-тормозной системой автомобиля;
Ф - матрица динамики системы;
K - матрица обратной связи;
H - матрица вектора выхода;
m -весовой коэффициент;
b=[0-1 0 0]T.
Сложность принятия решения о выборе элементов матрицы обратной связи K обусловлена неопределенностью и динамичностью движения автомобилей в городском транспортном потоке, что делает нецелесообразным применение такого хорошо формализованного порядка выбора элементов матрицы обратной связи K, каковым является фильтр Калмана [4, стр. 28-29, стр. 86-97].
В свете этого наиболее целесообразным видится модальный подход [5, стр. 299-357] к выбору элементов матрицы обратной связи K, когда все собственные числа λγ оператора (Ф - КН) полагаются равными и отрицательными, т.е. λγ= λ0,∀γ, γ = 1,2,3,4), а выбор конкретного значения параметра λ0<0 осуществляется в процессе вычисления элементов матрицы обратной связи K.
В связи с изложенным, определяем зависимость между элементами матрицы обратной связи K и параметром λ0 через характеристическое уравнение [5, стр. 56-57], [6, стр. 51-53] вида:
|Ф-KH-Eλ| = (λ-λ0)4, (9)
где E - единичная матрица размера 4х4.
Принимая во внимание, что техническим результатом от применения заявленного устройства следящего управления продольным движением автомобиля является снижение ошибок слежения по положению (r1), далее, при определении оптимальных параметров заявленного устройства, рассматриваем показатель, характеризующий указанный технический результат, в виде среднеквадратического значения ошибки слежения по положению (необходимость в осреднении вызвана наличием ошибок измерений и требованиями точного определения параметров устройства):
где величина ошибки слежения r1 получена численным решением системы уравнений (3,4,5,6,8,11).
Для выбора значения параметра λ0 и определения элементов матрицы обратной связи K придерживаемся далее порядка, содержащего следующие последовательно выполняемые процедуры:
1. Определение из уравнений системы (8) зависимости элементов вектора Kx от величины параметра λ0 при условии m =1 и KV=0 (приложение 1).
2. Определение численным решением системы уравнений (3, 4, 5, 6, 8) оптимального значения параметра λ0, при котором среднеквадратическое значение q ошибки слежения по положению (10) минимально.
3. Определение из уравнений (8) зависимости элементов вектора KV от параметра λ0 при произвольном значении весового коэффициента m и сохранении динамических свойств оценки, определенных выбранным значением параметра λ0 и полученными зависимостями элементов вектора Kx от величины параметра λ0 (приложение 1).
4. Определение численным решением системы уравнений (3, 4, 5, 6, 8) оптимального значения весового коэффициента m, при котором среднеквадратическое значение q ошибки слежения по положению (10) минимально.
Содержание указанных процедур поясняется ниже.
Выполняем п. 1 упомянутого выше порядка процедур (подробное изложение - в приложении 1). Для выполнения вычислений по п. 2 порядка процедур предварительно определяем основные характеристики динамики транспортного потока. Так на отдельных интервалах времени в нестационарном режиме движение в потоке автомобилей имеет колебательный характер в продольном направлении, в связи с этим далее рассматриваем случай, когда ускорение, с которым движется автомобиль, описывается периодической функцией вида:
где  амплитуда колебательной составляющей ускорения;
амплитуда колебательной составляющей ускорения;
ωi - круговая частота колебательного процесса.
Для конкретных моделей автомобилей предельные наибольшие значения параметров  известны, обозначим их соответственно
известны, обозначим их соответственно 
Зафиксировав все параметры модели заявляемого устройства и варьируя только величину параметра λ0, выполняем по п. 2 порядка процедур многократное вычисление q (для различных значений параметра λ0 на интервале времени [0,T] , T = 2πN/ω
Выполняем п. 3 порядка процедур и определяем вектор KV. В этом случае в формировании оценки  участвуют данные обоих видов измерений: Zr и ZV. Однако динамические свойства оценивания остаются неизменными, так как обусловлены выбранным значением параметра λ0 и полученными зависимостями элементов вектора Kx от величины параметра λ0 (приложение 1).
участвуют данные обоих видов измерений: Zr и ZV. Однако динамические свойства оценивания остаются неизменными, так как обусловлены выбранным значением параметра λ0 и полученными зависимостями элементов вектора Kx от величины параметра λ0 (приложение 1).
Выполняем п. 4 порядка процедур. Для этого, зафиксировав все параметры модели заявленного устройства и варьируя величину весового коэффициента m, проводим аналогичные пункту 2 вычисления. Повторяя вычисления выражения (10) для различных значений весового коэффициента m, строим график функции q = q(m). Требуемая величина весового коэффициента m выбрана на графике как абсцисса минимума функции q, т.е. из условия m = arg minm q(m).
Таким образом, блок оценивания 5 (фиг. 1,2,3) выполняет оценивание величины F, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля, при этом параметры блока оценивания заявленного устройства выбраны оптимальными.
Принимая во внимание вышеизложенное, возвращаемся к уравнениям (3,4):
r(0) = r0,
Формируем управление в виде суммы трех составляющих, первые две из которых аналогичны прототипу, а третья является оценкой  величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля:
величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля:
С учетом выражения (11) приводим уравнения (3,4) к виду:
r(0) = r0,

Из этих выражений следует, что, с некоторым запаздыванием τd (значение τd для конкретных автомобилей известно исходя из инерционных свойств их двигательно-тормозных систем), величина удельной силы u стремится к значению управления  В процессе слежения величина [p1(Zr-R0)+p2ZV]→ εZ, т.е. минимизируется, из этого следует, что в процессе слежения удельная сила u стремится к величине
В процессе слежения величина [p1(Zr-R0)+p2ZV]→ εZ, т.е. минимизируется, из этого следует, что в процессе слежения удельная сила u стремится к величине  где εZ - величина, размер которой определяется ошибками слежения по положению и скорости.
где εZ - величина, размер которой определяется ошибками слежения по положению и скорости.
Следовательно величина удельной силы u, близкая к значению величины F, см правую часть уравнения (3), компенсирует величину F. Таким образом, осуществляется минимизация правой части уравнения (3) путем компенсации величины F удельной силой u, близкой к оценке  В устройстве-прототипе подобная компенсация не осуществляется. За счет минимизации сил в правой части уравнения (3), в заявленном устройстве реализуется достижение нового технического результата, заключающегося в снижении ошибок слежения по положению.
В устройстве-прототипе подобная компенсация не осуществляется. За счет минимизации сил в правой части уравнения (3), в заявленном устройстве реализуется достижение нового технического результата, заключающегося в снижении ошибок слежения по положению.
Далее рассматриваем детально процесс формирования ошибки оценивания Δr. Показываем, что оцененная величина  осуществляет слежение за истинным значением величины F и что оцененная величина
осуществляет слежение за истинным значением величины F и что оцененная величина  близка к величине F. Это позволяет осуществлять упомянутую нами ранее минимизацию правой части уравнения (3). С этой целью записываем уравнение (7) без обратной связи:
близка к величине F. Это позволяет осуществлять упомянутую нами ранее минимизацию правой части уравнения (3). С этой целью записываем уравнение (7) без обратной связи:  для точного значения вектора состояния r совместно с уравнением выхода y = Hr. Тогда система уравнений относительного движения автомобилей приобретает следующий вид:
для точного значения вектора состояния r совместно с уравнением выхода y = Hr. Тогда система уравнений относительного движения автомобилей приобретает следующий вид:
Как упоминалось ранее, нами принята аппроксимация силы F полиномом первой степени в каждой точке интервала слежения t0, а именно: F = F0 + f1(t-t0), F0 = const, f1 = const, t-t0= Δt, Δt→ ε, где ε - бесконечно малый промежуток времени. Данная система уравнений (12) позволяет получить точное значение вектора состояния r = (r1, r2, F, f1), если известны, т.е. точно измерены в каждый момент времени t0 интервала слежения величины F0 и f1.
Для исключения данного практически невыполнимого условия охватываем систему обратной связью (см. уравнение 7) [4, стр. 15], [5, стр. 275]:
что позволяет, используя измерения только лишь расстояния и относительной скорости: Z = (Zr, ZV)T, получать оценку всех элементов вектора  в том числе и искомого
в том числе и искомого 
Представляем систему уравнений (7) в том виде, в котором она разработана нами для заявленного устройства (см. систему уравнений 8):



Вычитаем уравнения системы (8) из уравнений (12) и, опуская члены, содержащие случайные величины ошибок измерений как не влияющие на дальнейшие выводы, представляем результат в следующем виде:
где Δr = (Δr1,Δr2,ΔF,Δf1)T - вектор ошибки оценивания; компонента вектора ошибки оценивания по положению;
компонента вектора ошибки оценивания по положению; компонента вектора ошибки оценивания относительной скорости;
компонента вектора ошибки оценивания относительной скорости; компонента вектора ошибки оценивания величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля;
компонента вектора ошибки оценивания величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля; компонента вектора ошибки оценивания производной от величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля.
компонента вектора ошибки оценивания производной от величины, равной сумме ускорения впереди едущего транспортного средства и удельных сил сопротивления качению и воздуху автомобиля.
Система уравнений (13) представляет собой уравнения для вектора ошибки оценивания Δr = (Δr1,Δr2,ΔF,Δf1) величина которого свидетельствует о том, насколько близок вектор оценки  к истинному вектору r = (r1, r2, F, f1), а, следовательно,
к истинному вектору r = (r1, r2, F, f1), а, следовательно,  к F.
к F.
Представляем систему уравнений ошибок оценивания (13) в матричном виде:
где 
Тогда характеристическое уравнение [5, стр. 56], [6, стр. 51- 53] для матрицы  принимает вид
принимает вид
которое по содержанию совпадает с характеристическим уравнением для матричного уравнения (9):
Таким образом, решения, полученные для характеристического уравнения вида |Ф-KH-Eλ| (см. уравнение 9), полностью применимы для характеристического уравнения вида |AΔ-Eλ|.
В приложении 1 подробно рассмотрен порядок определения элементов матрицы обратной связи K, весового коэффициента m и параметра λ0. Совпадающие характеристические уравнения |AΔ-Eλ| и |Ф-KH-Eλ| дают одни и те же значения оптимальных величин параметра λ0 и весового коэффициента m. Так как параметр λ0<0, что означает асимптотическую устойчивость уравнений (13) для ошибки оценивания Δr, то с течением времени и со скоростью, определяемой величиной параметра λ0, ошибка оценивания Δr стремится к нулю. Таким образом, из рассмотрения ошибки оценивания Δr следует, что элементы вектора  осуществляют слежение за соответствующими элементами вектора r = (к1,к2, F,f1), в том числе элемент
осуществляют слежение за соответствующими элементами вектора r = (к1,к2, F,f1), в том числе элемент  осуществляет слежение за F.
осуществляет слежение за F.
Все вышеизложенное является обоснованием достижения технического результата от применения заявленного устройства, заключающегося в снижении ошибок слежения за счет упомянутой ранее минимизации правой части уравнения (3).
Смысл оптимальности значений параметра λ0 и весового коэффициента m состоит в том, что при оптимальных значениях параметра λ0 и весового коэффициента m величина ошибки оценивания Δr является минимально возможной. При отклонении параметра λ0 и весового коэффициента m от своих оптимальных значений ошибка оценивания Δr увеличивается. Так, при увеличении значения параметра λ0 расширяется частотная полоса пропускания блока оценивания, соответственно, возрастает влияние ошибок измерений (случайные величины), что приводит к увеличению ошибок оценивания, а, следовательно, и ошибок слежения. При уменьшении параметра λ0 ошибки слежения возрастают за счет увеличения инерционности процесса оценивания и ухудшения слежения вектора  за его истинным значением r, что также приводит к увеличению ошибок оценивания, а, следовательно, и ошибок слежения. Применение оптимальной величины весового коэффициента m позволяет дополнительно уменьшить ошибку оценивания за счет оптимального соотношения влияния данных измерений расстояния Zr и относительной скорости ZV на формирование ошибки оценивания.
за его истинным значением r, что также приводит к увеличению ошибок оценивания, а, следовательно, и ошибок слежения. Применение оптимальной величины весового коэффициента m позволяет дополнительно уменьшить ошибку оценивания за счет оптимального соотношения влияния данных измерений расстояния Zr и относительной скорости ZV на формирование ошибки оценивания.
Рассмотрим еще один вопрос, связанный с пояснением работы заявленного устройства, о выборе значений коэффициентов чувствительности слежения по положению (p1) и скорости (p2).
Указанные коэффициенты не могут выбираться только из соображений требуемой чувствительности слежения по положению или скорости. В зависимости от величин коэффициентов чувствительности слежения по положению (p1) и скорости (p2) данные измерений расстояния Zr и относительной скорости ZV принимают различное участие в формировании управления W (см. уравнение 11): весовое соотношение данных измерений расстояния Zr и относительной скорости ZV предопределяет различную динамику управления. Нами показано (приложение 2), что существуют оптимальные значения коэффициентов чувствительности слежения по положению (p1) и скорости (p2), при которых обеспечивается минимизация переходных процессов и наилучшее управление.
В настоящее время заявленное устройство находится в стадии макетирования, его расчетные характеристики приводятся ниже. Представленные результаты вычисления параметров и характеристик заявленного устройства подтверждают выводы, приведенные в описании его работы, возможность осуществления изобретения и достижения технического результата.
Вычисления выполнены для системы уравнений (3, 4, 5, 6, 8, 11), включающей уравнения движения автомобиля и впереди едущего транспортного средства, двигательно-тормозной системы автомобиля, измерений, оценивания и формирования управления.
Вычисления выполнены применительно к автомобилям Mazda RX-7 (впереди едущее транспортное средство) и Mercedes SL600 [7] (автомобиль, управляемый с помощью заявленного устройства), со следующими выбранными нами значениями параметров:
1) a1=0,0287 с-1, a2=0,0281 с-1 - удельные аэродинамические сопротивления впереди едущего транспортного средства и автомобиля, соответственно, 
2) u1+ = 5,2 м/с2, u2+ = 4,55 м/с2 - предельные значения удельной силы u, развиваемые двигателями впереди едущего транспортного средства и автомобиля, соответственно;
|u
3) τd1≈ τd2= τd= 0,4c - постоянная времени двигательно-тормозных систем впереди едущего транспортного средства и автомобиля.
Удельные силы сопротивления качению приняты равными Q1=Q2=0,15 м/c2. Среднеквадратяческие погрешности измерений расстояния и скорости (см. уравнения 5, 6), описываемые нормальным законом распределения, приняты следующими: σr= 0,1м,σV= 0,1м/c. Характерные величины, участвующие в формировании весовой матрицы C (приложение 2), составляют: r1m = 0,6 м, r2m = 0,5 м/с, um = 3 м/с (типичные значения величин рассматриваемых параметров).
Начальные условия, опорная дистанция и предельные значения параметров  выбраны равными:
выбраны равными: (соответствует амплитуде колебаний положения впереди едущего автомобиля, равной 4 м),
(соответствует амплитуде колебаний положения впереди едущего автомобиля, равной 4 м),
ω* = 0,897c-1 (соответствует периоду колебаний положения впереди едущего автомобиля, равному 7 с).
Эти параметры соответствуют фрагменту ситуации с умеренной динамикой, возникающей при нестационарном движении двух различных автомобилей, движущихся один за другим в городском насыщенном потоке: впереди едущий автомобиль осуществляет равномерное движение со скоростью 30 км/час и одновременно - колебания положения с амплитудой в 4 м, следующий за ним автомобиль, управляемый с помощью заявленного устройства следящего управления продольным движением автомобиля, осуществляет движение, поддерживая опорную дистанцию, равную 7 м.
Кроме того, рассматривается ситуация с выраженной динамикой, когда впереди едущее транспортное средство осуществляет экстренную остановку (наезд на препятствие), а следующий за ним автомобиль управляемый с помощью заявленного устройства следящего управления продольным движением автомобиля, выполняет торможение (после остановки автомобиля режим слежения выключается водителем).
Показано, что ошибка слежения по положению при применении заявленного устройства для управления автомобилем снижается в сравнении со случаем применения в этих же целях устройства-прототипа.
В целях сравнения заявленного устройства с прототипом решение системы уравнений (3, 4, 5, 6, 8, 11) выполнено при формировании управления в двух вариантах: (см. уравнение 11) - заявленное устройство;
(см. уравнение 11) - заявленное устройство;
- W = p1(Zr - Rо) + p2ZV - прототип.
Применение коэффициентов чувствительности слежения по положению p1 и скорости p2 в формировании управления в устройстве-прототипе обуславливает для прототипа достижение наилучшего возможного результата, так как выбор коэффициентов чувствительности слежения по положению p1 и скорости p2 выполнен оптимально (приложение 2). Все другие параметры прототипа и заявленного устройства также одинаковы. Все это обеспечивает создание равных условий при сравнении заявленного устройства с прототипом.
Численные решения системы уравнений (3, 4, 5, 6, 8, 11) выполнены с использованием функции ode45 [8, стр. 204-208], с точностью вычислений 10-6.
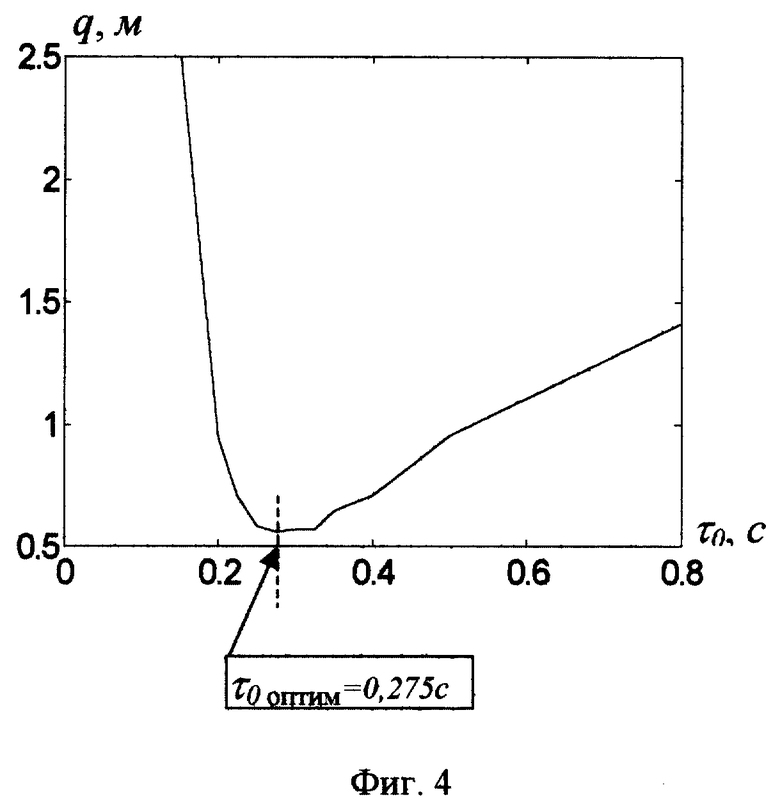
Далее представляем результаты вычисления оптимальных параметров заявленного устройства. Диаграмма зависимости среднеквадратичного значения ошибки слежения q от величины постоянной времени оценивания τ0 (фиг. 4 в осях (τ0,q), где τ0= λ
Далее принимая во внимание, что значение параметра λ0 выбрано, а элементы вектора Kx определены (см. приложение 1 и порядок процедур решения уравнения (9)), находим оптимальное значение весового коэффициента m, согласующего доли участия измерений расстояния Zr и относительной скорости ZV в оценке вектора состояния  Как показывают результаты вычислений, представленные на диаграмме зависимости среднеквадратичного значения ошибки слежения от величины весового коэффициента m (фиг. 5) оптимальным является значение: m= 0,2, при котором имеет место минимум величины q (см. уравнение 10), т.е. наименьшие ошибки слежения.
Как показывают результаты вычислений, представленные на диаграмме зависимости среднеквадратичного значения ошибки слежения от величины весового коэффициента m (фиг. 5) оптимальным является значение: m= 0,2, при котором имеет место минимум величины q (см. уравнение 10), т.е. наименьшие ошибки слежения.
В обоих случаях при определении оптимальных значений параметра λ0 и весового коэффициента m принималось значение N=40, что обеспечило приемлемую точность (10-3) вычисления q.
На диаграмме линий уровня матрицы функционала качества управления (фиг. 6) представлены результаты вычисления, иллюстрирующие процедуру выбора вектора p=(p1,p2), (приложение 2). Замкнутые кривые в области устойчивости - это линии уровня значений нормы матрицы  функционала качества управления I. Значение нормы матрицы
функционала качества управления I. Значение нормы матрицы  на линиях уровня убывает по мере движения к точке оптимума 0, в которой имеет место минимум переходных процессов, т. е. наилучшее управление соответствует точке с координатами
на линиях уровня убывает по мере движения к точке оптимума 0, в которой имеет место минимум переходных процессов, т. е. наилучшее управление соответствует точке с координатами  при этом вычисленный для этой точки спектр матрицы A составляет: Λ(A) = {-0,5;-1,0±j2,915}, что свидетельствует об асимптотической устойчивости управления (матрицы A), так как все действительные части собственных чисел матрицы A имеют отрицательные значения. Исходя из изложенного, нами выбраны значения p1=1,9 и p2=4,2, обеспечивающие наилучшее управление.
при этом вычисленный для этой точки спектр матрицы A составляет: Λ(A) = {-0,5;-1,0±j2,915}, что свидетельствует об асимптотической устойчивости управления (матрицы A), так как все действительные части собственных чисел матрицы A имеют отрицательные значения. Исходя из изложенного, нами выбраны значения p1=1,9 и p2=4,2, обеспечивающие наилучшее управление.
Таким образом, оптимальные параметры заявленного устройства однозначно определены.
Далее сравниваем ошибки слежения по положению при использовании прототипа и заявленного устройства для двух наиболее типичных ситуаций: умеренная и выраженная динамика процессов движения.
На фиг. 7 представлены временные диаграммы ошибки слежения по положению при применении прототипа и заявленного устройства для ситуации умеренной динамики потока автомобилей. Для прототипа значение амплитуды ошибки слежения составляет около 1 м, для заявленного устройства - около 0,6 м. Это соответствует техническому результату от применения заявленного устройства, заключающемуся в снижении ошибок слежения по положению в сравнении с прототипом.
На фиг. 8 представлены временные диаграммы расстояния между автомобилем и впереди едущим транспортным средством при экстренной остановке последнего (наезд на препятствие). Из диаграмм следует, что автомобиль, управляемый заявленным устройством, в сравнении с автомобилем, управляемым прототипом, осуществил полную остановку на большем удалении (на 0,7 м) от экстренно остановившегося впереди ехавшего автомобиля, т.е. с меньшей ошибкой слежения. Это также подтверждает достижение технического результата от применения заявленного устройства и в условиях выраженной динамики движения.
Источники информации
1. Коноплянко В.И. Основы безопасности дорожного движения. М.: ДОСААФ, 1978.
2. Патент Франции, N 2733608, 6 G 05 D 1/02, 1996 г. Способ и устройство для автоматического регулирования скорости движения автомобиля и расстояния, отделяющего его от впереди идущего автомобиля. "Изобретения стран мира". Вып. 92(G05) N 3/98, стр. 14.
3. Патент Германии, N 4100993, 5 G 05 D 1/02, B 60 K 31/00, 1991 г. Способ и устройство следящего управления для автомобиля. "Изобретения стран мира". Вып. 92 (G05) N 9/92, стр. 28.
4. Браммер K., Зиффлинг Г. Фильтр Калмана - Бьюси. Пер. с нем. М.: Наука, 1982.
5. Андреев Ю.Н. Управление конечномерными линейными объектами. М.: Наука, 1976.
6. Ланкастер П. Теория матриц. Пер. с англ. М.: Наука, 1982.
7. Мир легковых автомобилей - 1999. Автокаталог, 6-й выпуск. М.: За рулем, 1998.
8. В. Г. Потемкин. Система MATLAB. Справочное пособие. М.: ДИАЛОГ-МИФИ, 1997.
9. Беллман P. Введение в теорию матриц. Пер. с англ. М.: Наука, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СЛЕДЯЩЕГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ АВТОМОБИЛЯ | 2002 |
|
RU2225635C2 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1999 |
|
RU2147000C1 |
| СПОСОБ РАСПОЗНАВАНИЯ УДАЛЕННЫХ ВОЗДУШНЫХ ОБЪЕКТОВ | 2001 |
|
RU2206104C2 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1999 |
|
RU2146999C1 |
| АДАПТИВНАЯ СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ ПОДВОДНОГО РОБОТА | 2002 |
|
RU2215318C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2000 |
|
RU2191106C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 1999 |
|
RU2147985C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 1999 |
|
RU2147001C1 |
| АМФИБИЙНЫЙ ТРАНСПОРТНЫЙ АППАРАТ | 1999 |
|
RU2174080C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ОПАСНОГО СБЛИЖЕНИЯ ДВУХ СУДОВ | 2004 |
|
RU2262466C1 |
Изобретение предназначено для автоматического управления продольным движением автомобиля в условиях городского насыщенного транспортного потока. Технический результат заключается в снижении ошибок слежения по положению за счет формирования управления автомобилем на основе измеренных относительной скорости и отклонения от опорной дистанции расстояния между автомобилем и впереди едущим транспортным средством, а также на основе оценки величины, равной сумме ускорения впереди едущего транспортного средства и удельных (нормированных к собственной массе автомобиля) сил сопротивления качению и воздуху автомобиля. Устройство следящего управления продольным движением автомобиля содержит измеритель относительной скорости и расстояния между автомобилем и впереди едущим транспортным средством, задатчик опорной дистанции, формирователь разности измеренного расстояния и опорной дистанции, датчик удельной силы, развиваемой двигательно-тормозной системой автомобиля, блок управления и блок оценивания величины, равной сумме ускорения впереди едущего транспортного средства и удельных (нормированных к собственной массе автомобиля) сил сопротивления качению и воздуху автомобиля. 8 ил., 1 табл.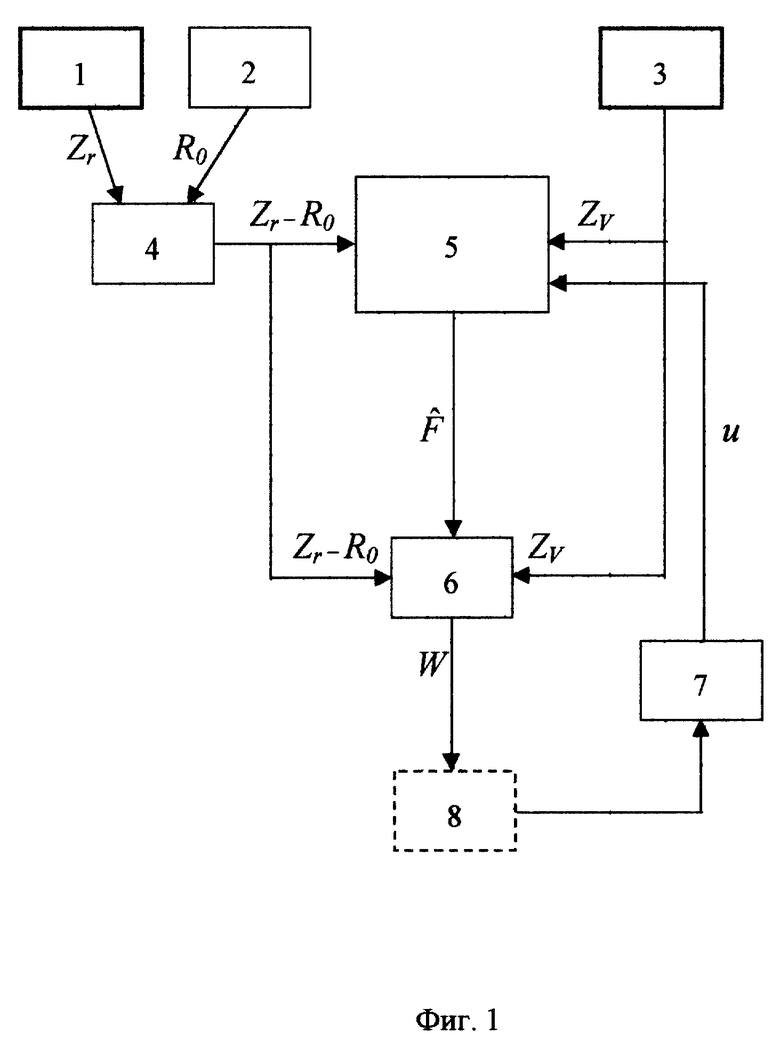
Устройство следящего управления продольным движением автомобиля, содержащее измерители относительной скорости и расстояния, задатчик опорной дистанции, формирователь разности измеренного расстояния и опорной дистанции, блок управления, при этом измеритель расстояния и задатчик опорной дистанции подключены ко входам формирователя разности измеренного расстояния и опорной дистанции, выход которого подключен ко входу блока управления, к другому входу которого подключен измеритель относительной скорости, выход блока управления предназначен для подачи сигнала управления на двигательно-тормозную систему автомобиля, отличающееся тем, что в него дополнительно включены четыре интегратора, три формирователя разности, четыре сумматора, восемь усилителей и датчик удельной силы, развиваемой двигательно-тормозной системой автомобиля, при этом входы усилителей с нечетными номерами подключены к выходу первого формирователя разности, а входы усилителей с четными номерами подключены к выходу второго формирователя разности, выходы первого и второго, третьего и четвертого, пятого и шестого, седьмого и восьмого усилителей подключены попарно к первому и второму входам первого, второго, третьего и четвертого сумматоров, соответственно, кроме того, выход первого сумматора подключен ко входу первого интегратора, выход которого подключен к третьему входу второго сумматора, выход второго сумматора подключен ко входу второго интегратора, выход которого подключен к первому входу третьего формирователя разности и входу блока управления одновременно, выходы третьего и четвертого сумматоров подключены соответственно ко входам третьего и четвертого интеграторов, выходы которых соответственно подключены к первым входам первого и второго формирователей разности, одновременно выход четвертого интегратора подключен к третьему входу третьего сумматора, вход датчика удельной силы подключен к двигательно-тормозной системе автомобиля, а выход датчика удельной силы подключен ко второму входу третьего формирователя разности, выход которого подключен к третьему входу четвертого сумматора, кроме того, ко второму входу первого формирователя разности подключен выход формирователя разности измеренного расстояния и опорной дистанции, ко второму входу второго формирователя разности подключен выход измерителя относительной скорости.
| DE 4100993 А1, 25.07.1991 | |||
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ АВТОМОБИЛЯ В АВАРИЙНЫХ СИТУАЦИЯХ | 1991 |
|
RU2006385C1 |
| УСТРОЙСТВО АЭРАЦИИ ДЛЯ ЗАКРЫТЫХ ЕМКОСТЕЙ, ИЗВЛЕКАЕМОЕ БЕЗ ОТКАЧКИ АЭРИРУЕМОЙ ЖИДКОСТИ | 2019 |
|
RU2733608C1 |
| Способ стерилизации компонентов питательных бактериологических сред | 1961 |
|
SU145989A1 |

