Устройство предназначено для исследования поверхности образцов после модификации их поверхности. Оно может быть использовано в медицине для исследования биологических образцов, в химической промышленности для исследования полимеров, а также в различных областях промышленности для исследования нанодиспергированных взвесей в жидкостях.
Известен сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности объекта, включающий базовой элемент, на котором установлены держатель пуансона с пуансоном, сопряженный с первым приводом, держатель образца с образцом, установленный на пьезосканере, сопряженном посредством рычага со вторым приводом, и анализатор, имеющий возможность сопряжения с образцом [1].
Основной недостаток этого устройства заключается в том, что образец с держателем образца и пьезосканером находится на рычаге, имеющем ограниченную жесткость, что приводит к недостаточной точности анализа образца, особенно если он имеет большие размеры и соответственно массу.
Технический результат изобретения заключается в повышении точности измерения и расширении функциональных возможностей.
Указанный технический результат достигается тем, что в сканирующем зондовом микроскопе с нанотомом, включающем базовый элемент, на котором установлен держатель пуансона с пуансоном, сопряженный с первым приводом, держатель образца с образцом, сопряженный со вторым приводом, и сканирующий зондовый блок, имеющий возможность сопряжения с образцом, первый привод выполнен однокоординатным (координата Y), перемещающим пуансон по направлению в сторону образца, второй привод выполнен однокоординатным (координата X), перемещающим держатель образца с образцом перпендикулярно координате Y.
Существует вариант, в котором в устройство введен привод держателя пуансона.
Существуют также варианты, в которых пуансон выполнен в виде ножа с режущей кромкой, или в виде иглы, ось которой расположена под углом к координате Y, или в виде изогнутой иглы, рабочая часть которой расположена под углом к координате Y, или пуансон имеет сферическую кромку.
Существуют также варианты, в которых нож имеет на режущей кромке выборки или выступы.
Существуют также варианты, в которых сканирующий зондовый блок, держатель пуансона с пуансоном и держатель образца с образцом помещены в герметичную камеру или в вакуумную камеру.
Существуют также варианты, в которых держатель пуансона и держатель образца подключены соответственно к первому криоэлементу и второму криоэлементу, при этом первый криоэлемент выполнен в виде первого элемента Пельтье, а второй криоэлемент выполнен в виде второго элемента Пельтье или первый криоэлемент выполнен в виде первого элемента Пельтье с теплообменником, а второй криоэлемент выполнен в виде второго элемента Пельтье с теплообменником.
Существует также вариант, в котором держатель пуансона подсоединен к первому хладопроводу, держатель образца подключен ко второму хладопроводу, при этом оба хладопровода соединены с криогенным вводом.
Существует также вариант, в котором сканирующий зондовый блок, держатель пуансона с пуансоном и держатель образца с образцом помещены в криокамеру.
Существует также вариант, в котором первый привод выполнен в виде подвижной каретки, сопряженной с двигателем линейного перемещения.
Существует также вариант, в котором второй привод выполнен в виде пьезодвигателя.
Существует также вариант, в котором сканирующий зондовый блок содержит пьезосканер с зондом, сопряженный с шаговым двигателем линейного перемещения и установленный подвижно по координате Х на базовом элементе.
Существуют также варианты, в которых в устройство введен привод держателя пуансона, выполненный в виде линейного однокоординатного привода или в виде привода вращения, а пуансон покрыт противоизносным антифрикционным покрытием.
На фиг.1 схематично изображен упрощенный основной вид сканирующего зондового микроскопа с нанотомом и пуансоном в виде ножа.
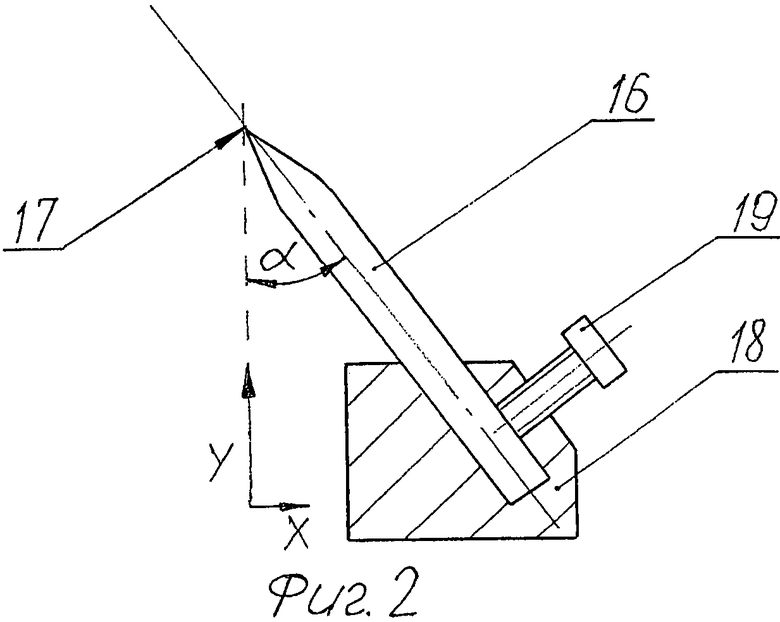
На фиг.2 схематично изображен вариант выполнения пуансона в виде иглы.
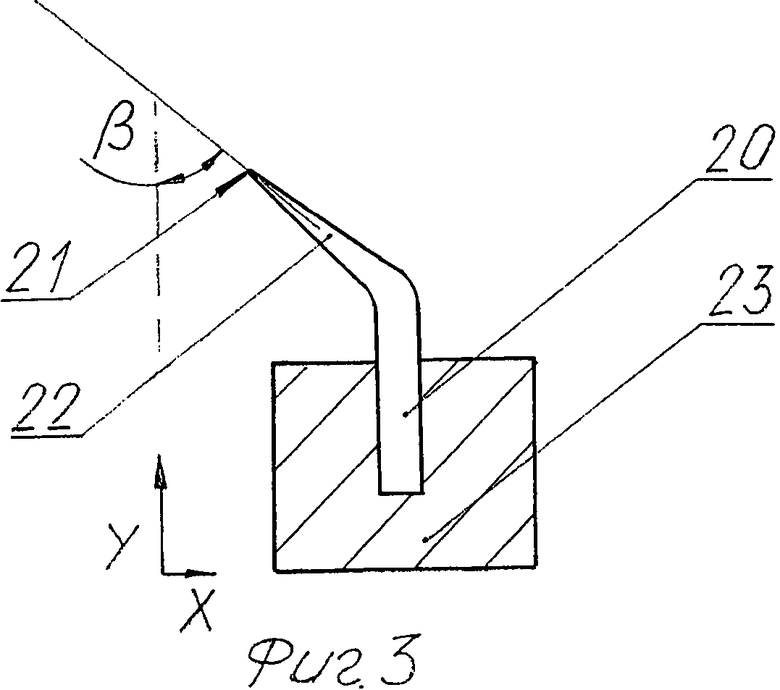
На фиг.3 схематично изображен вариант выполнения пуансона в виде изогнутой иглы.
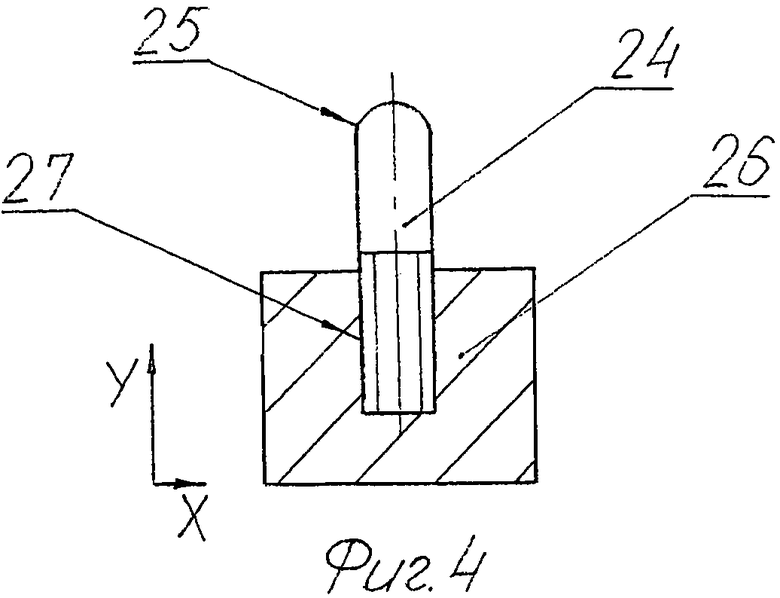
На фиг.4 схематично изображен вариант выполнения пуансона со сферической кромкой.
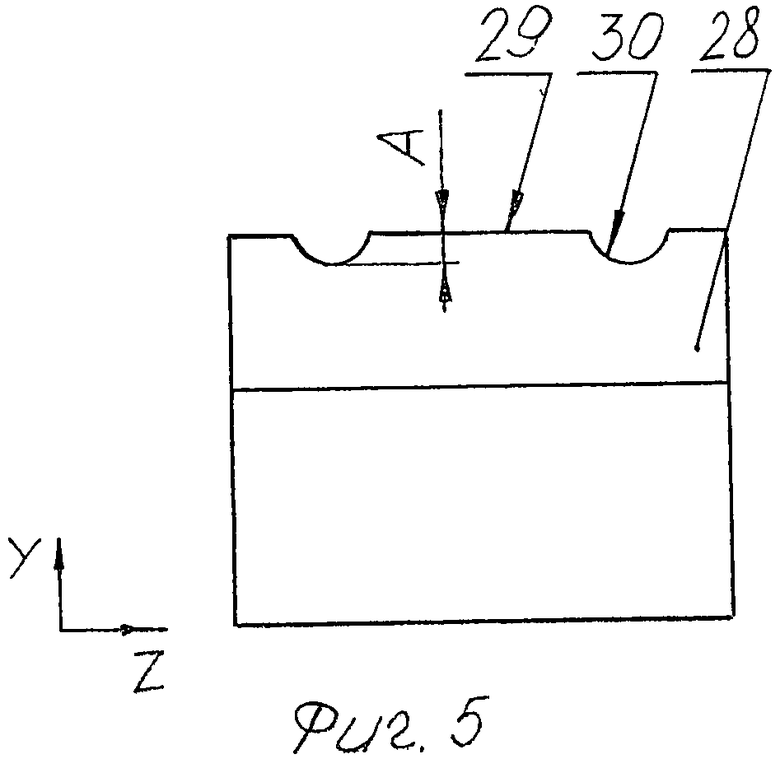
На фиг.5 схематично изображен пятый вариант выполнения пуансона с выборками на режущей кромке.
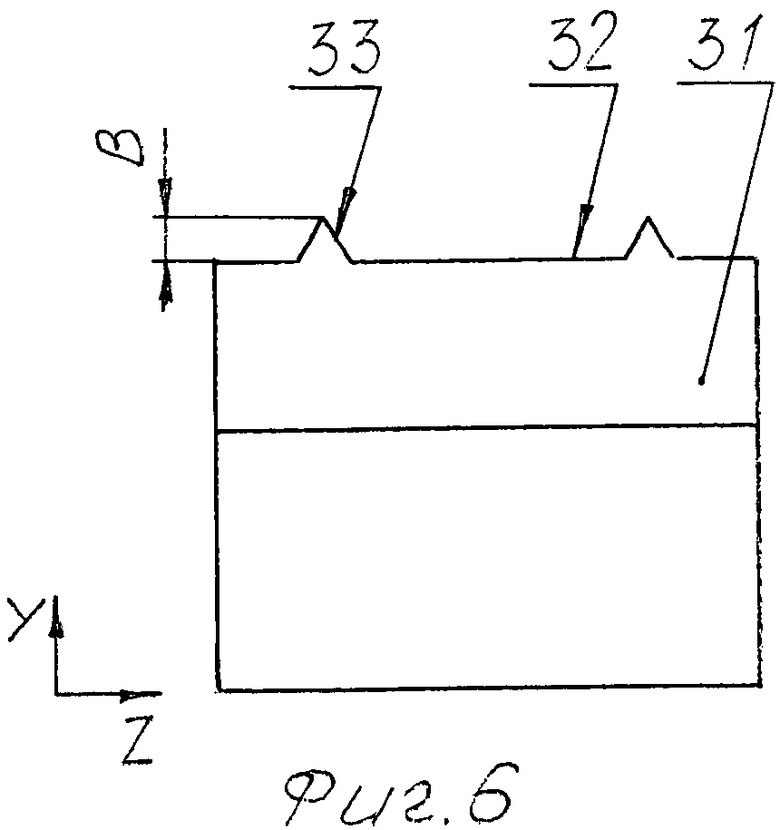
На фиг.6 схематично изображен вариант выполнения ножа с выступами на режущей кромке.
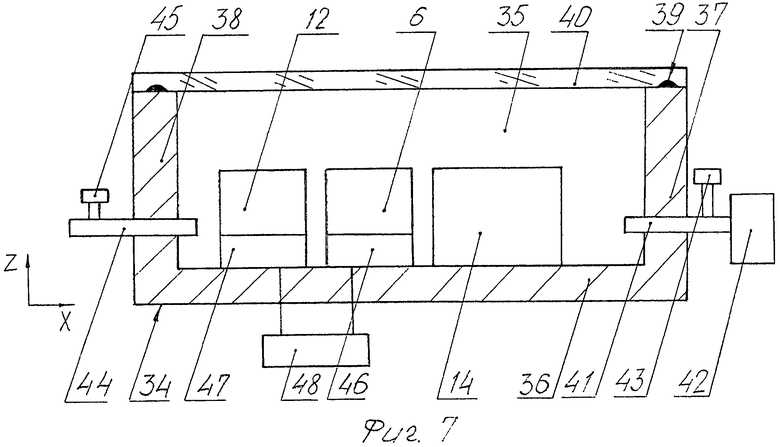
На фиг.7 схематично изображен упрощенный вид устройства, расположенного в герметичной камере.
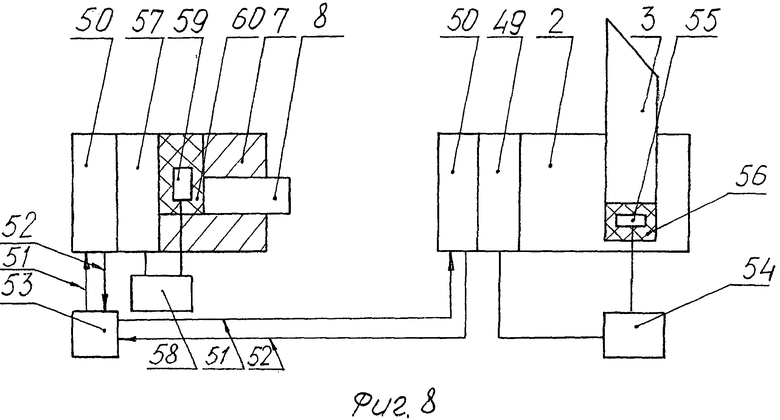
На фиг.8 схематично изображен вариант охлаждения пуансона и образца элементами Пельтье.
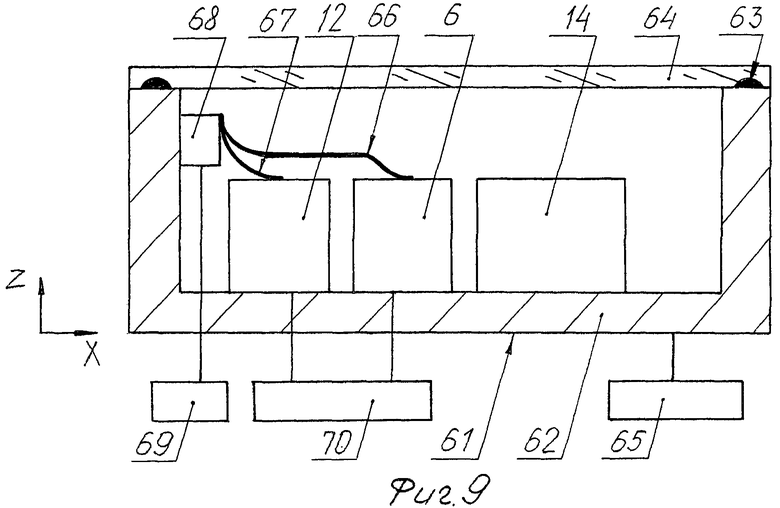
На фиг.9 схематично изображен упрощенный вид устройства, расположенного в вакуумной камере.
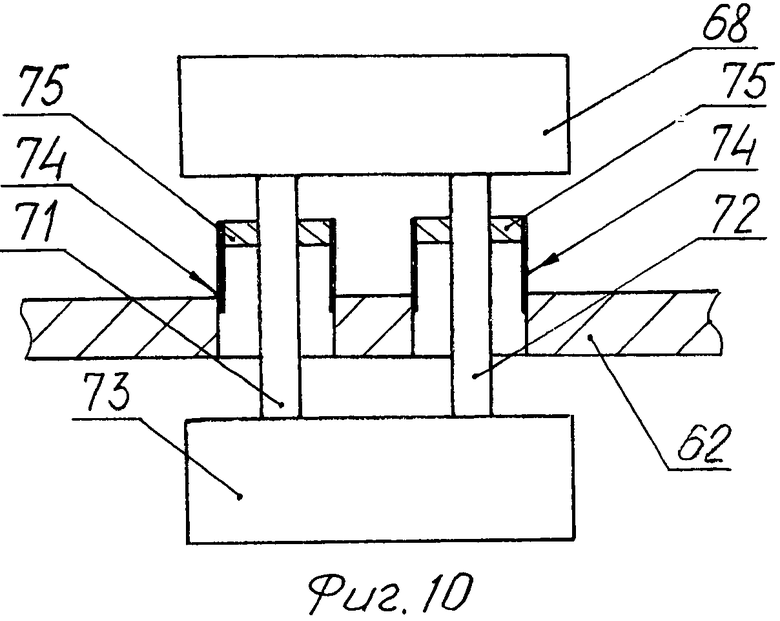
На фиг.10 схематично изображен вариант выполнения криогенного ввода.
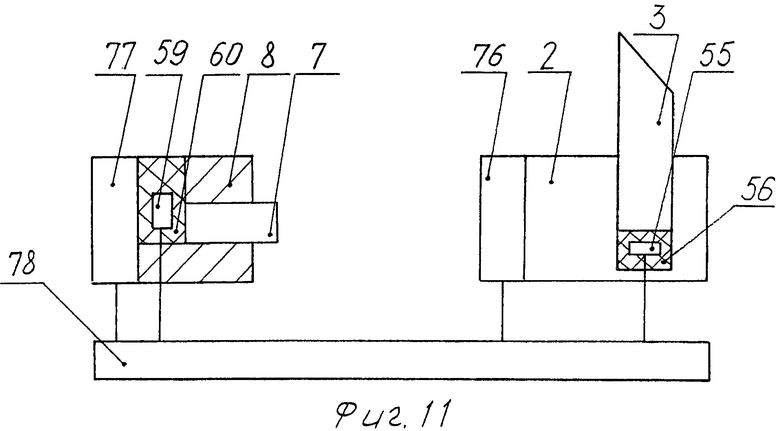
На фиг.11 схематично изображен вариант регулируемого охлаждения пуансона и образца.
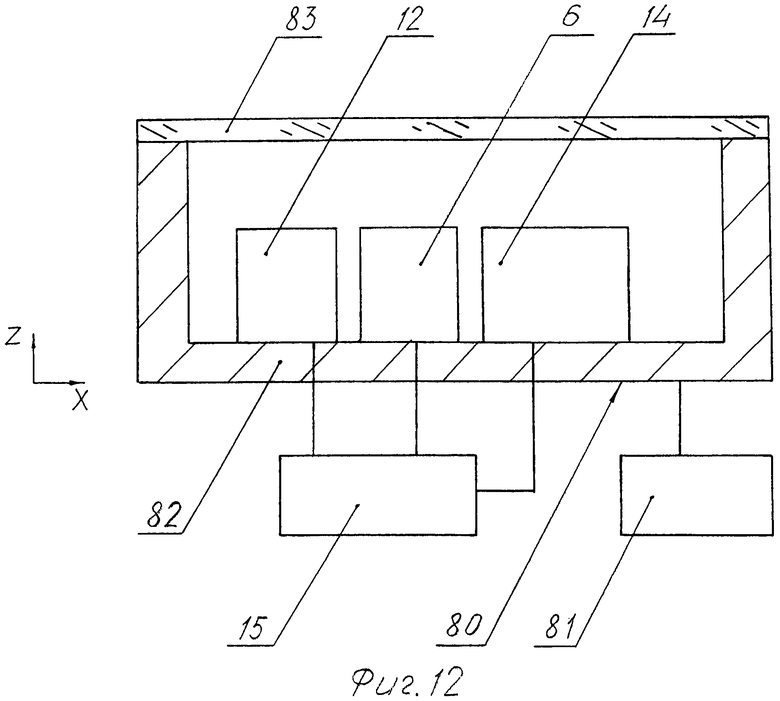
На фиг.12 схематично изображен упрощенный вид устройства, расположенного в криогенной камере.
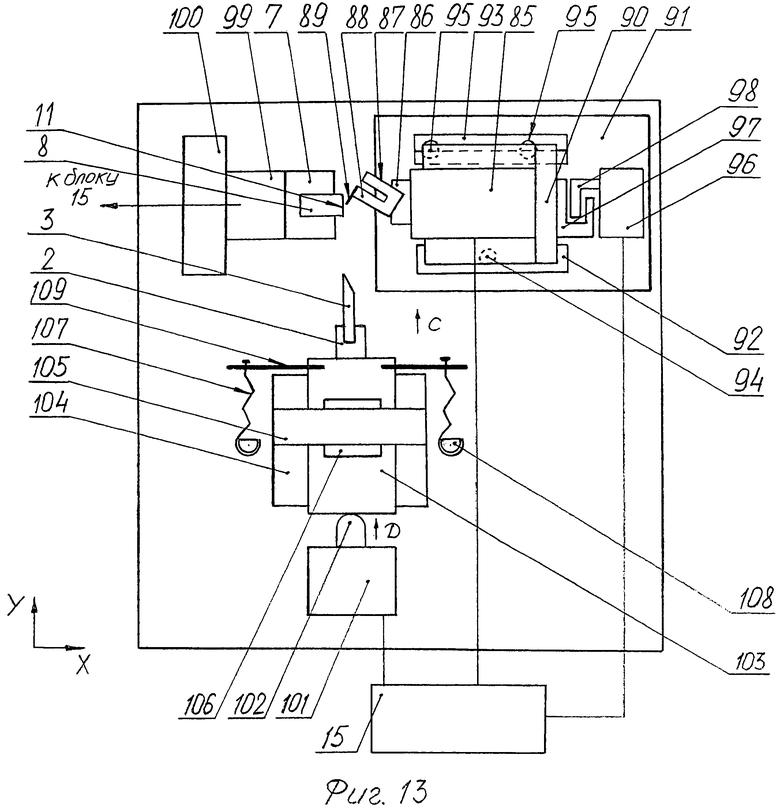
На фиг.13 схематично изображена общая схема устройства и варианты выполнения приводов.
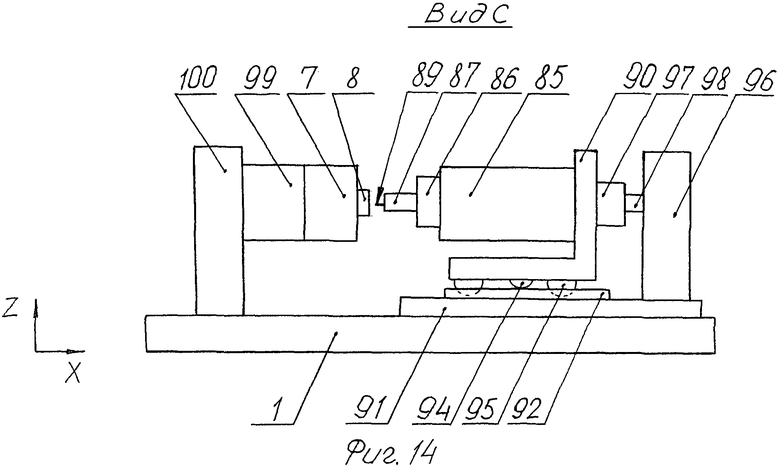
На фиг.14 схематично изображен вид сбоку (С) на привод образца и сканирующий зондовый блок.
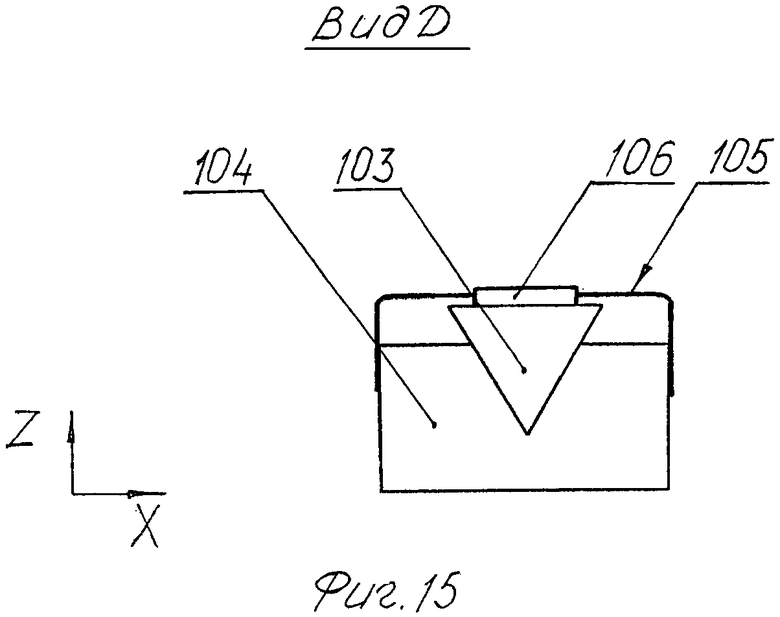
На фиг.15 схематично изображен вид сбоку (D) на каретку.
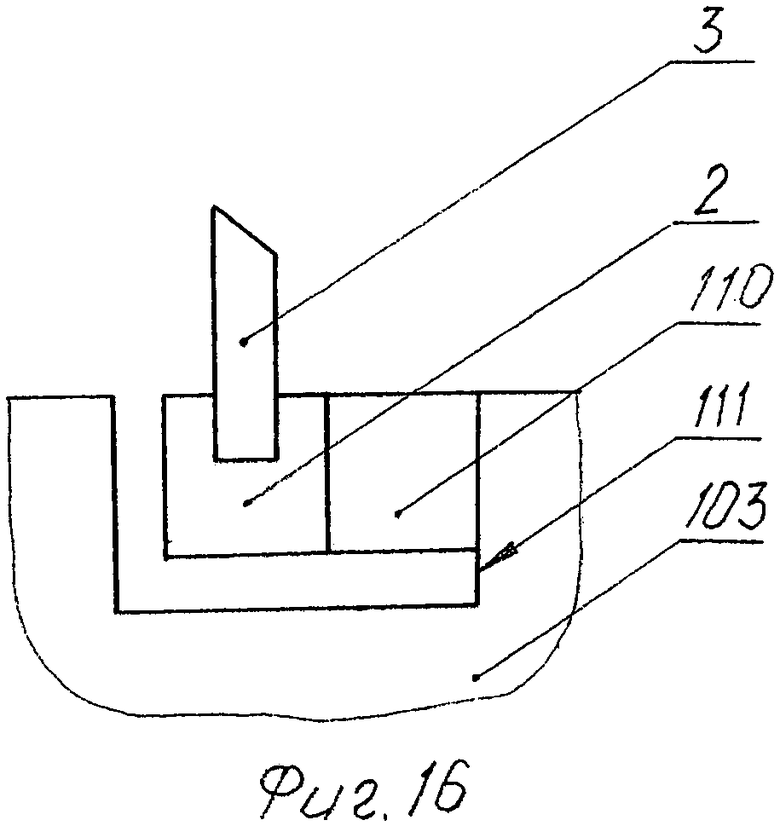
На фиг.16 схематично изображен линейный однокоординатный привод.
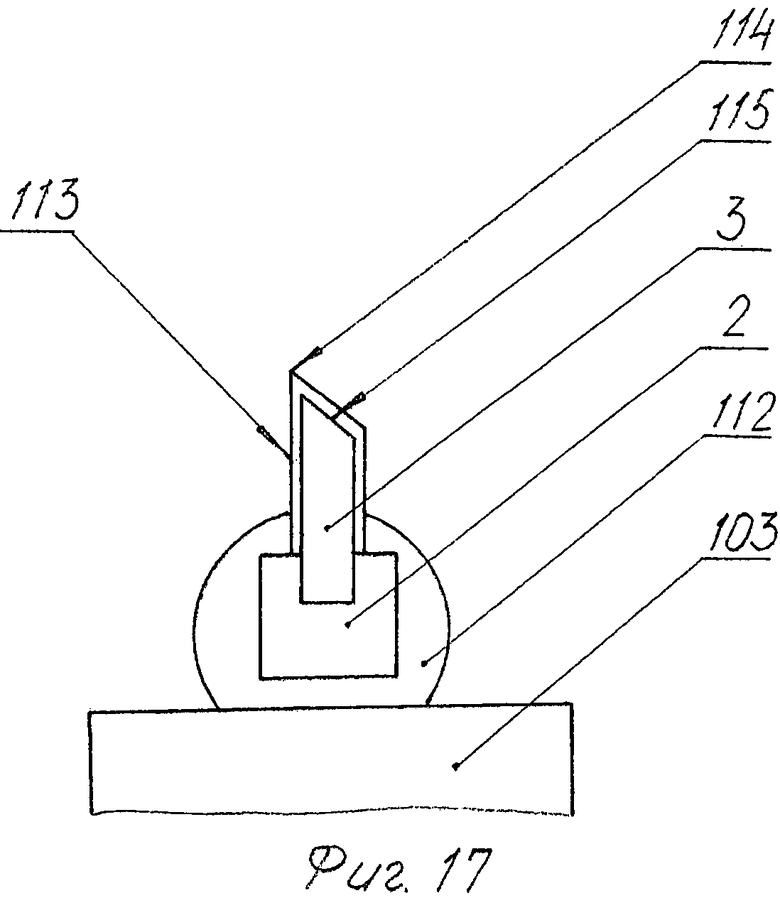
На фиг.17 схематично изображен привод вращения.
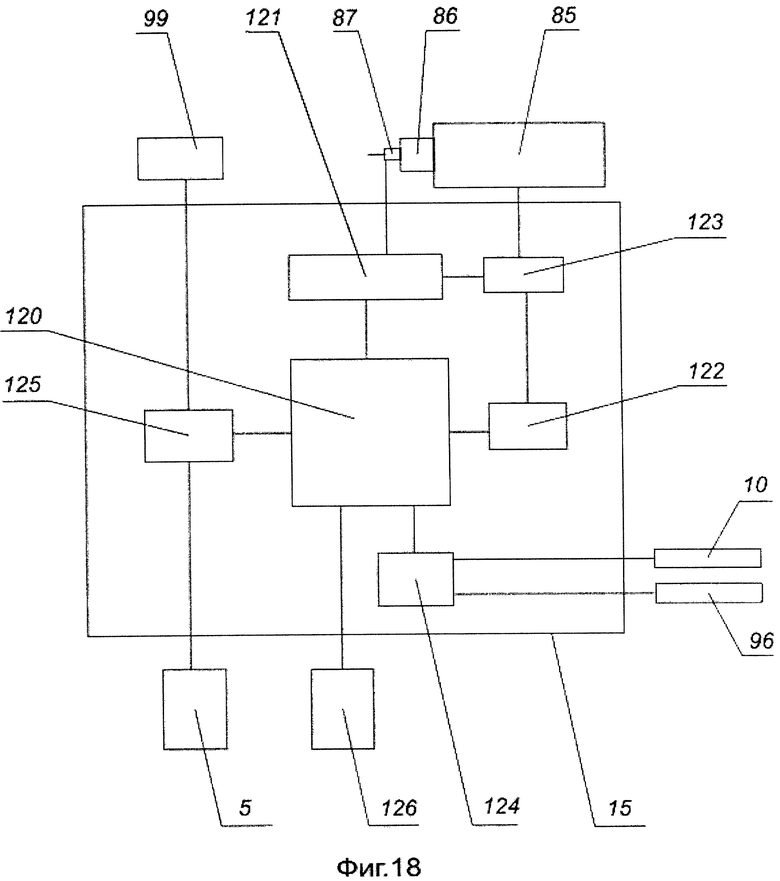
На фиг.18 изображена блок-схема блока управления.
Сканирующий зондовый микроскоп с нанотомом (ультрамикротомом) включает базовый элемент 1 (плоскую платформу в первом варианте), на котором установлены держатель пуансона 2 с пуансоном 3, сопряженный с первым однокоординатным приводом 4. Держатель пуансона 2 снабжен приводом держателя пуансона 5. Эти элементы образуют модуль модификации 6. На базовом элементе 1 также установлен держатель образца 7 с образцом 8, сопряженный со вторым однокоординатным приводом 9. Образец 8 может быть закреплен в держателе образца 7 посредством клеевого шва 10. В качестве клея может использоваться эпоксидная смола. Обратная клеевому шву 10 сторона образца 8 образует поверхность 11, предназначенную для модификации и анализа. Элементы 7, 8, 9, 10 и 11 представляют собой модуль образца 12. Первый привод 4 может осуществлять перемещение пуансона 2 по координате Y по направлению в сторону образца 8. В частном случае, если поверхность 11 образца 8 представляет собой плоскость, то перемещение пуансона 3 может быть параллельно поверхности 11. В общем случае первичная поверхность 11 до ее модификации может быть выпуклой, вогнутой, с выступами и т.п. Наиболее часто в качестве пуансона 3 выступает нож с протяженной прямолинейной (первый вариант) режущей кромкой 13. В этом случае поверхность 11 образца 8 после первого среза будет плоскостью и каждое последовательное перемещение пуансона 3 (ножа) будет параллельно этой плоскости. Для этого случая под этой плоскостью будем понимать поверхность 11. Второй привод 9 может осуществлять перемещение образца 8 по координате X, перпендикулярной координате Y. На базовом элементе 1 установлен также сканирующий зондовый блок 14, имеющий возможность сопряжения с образцом 8 и, в частности, с его поверхностью 11. Модули 6, 12 и 14 подключены к блоку управления 15, который может быть выполнен в виде модуля центрального процессора, построенного, например, на основе цифрового сигнального процессора (ЦСП) и содержащего контроллер блока 14, контроллер первого однокоординатного привода 4, привода держателя пуансона 5 и контроллер второго однокоординатного привода 9. В состав модуля центрального процессора может входить аналогово-цифровой преобразователь (АЦП) и набор интерфейсов для связи с другими устройствами, входящими в состав контроллера, а также с управляющим компьютером.
Пуансон 3 может быть выполнен в виде иглы 16 с острием 17, закрепленной в держателе иглы 18 винтом 19 под углом а к направлению Y. Предпочтительное значение угла α может быть в диапазоне 30-45°. В третьем варианте выполнения пуансона 3 изогнутая игла 20 (Фиг.3) с острием 21 может быть направлена рабочей частью 22 под углом β к направлению Y и закреплена в держателе 23. Предпочтительное значение угла β может быть в диапазоне 45-90°. Крепление иглы 20 в держателе 23 условно не показано. Это может быть винт или клей, например эпоксидная смола. Иглы 16 и 20 могут быть изготовлены из вольфрамовой, платиновой или платиноиридиевой проволоки с диаметрами в диапазоне 0.1-1 мм и заострены электрохимическим методом (см. подробно в [3]). В четвертом варианте пуансон 24 (Фиг.4) может иметь сферическую кромку 25. При этом соединение пуансона 24 с держателем 26 может быть осуществлено, например, посредством резьбовой части 27. В пятом варианте пуансон 3 может быть выполнен в виде ножа 28 (Фиг.5), в котором на режущей кромке 29 выполнены выборки 30, например, цилиндрической формы и глубиной А в диапазоне 10-100 мкм. Выборки 30 также могут быть треугольными, прямоугольными и овальными (не показано). В шестом варианте нож 31 имеет режущую кромку 32 с выступами 33, например, треугольной формы высотой В в диапазоне 10-100 мкм. Их форма может быть также цилиндрическая, прямоугольная или овальная (не показано).
Во втором варианте базовый элемент 1 (Фиг.1) представляет собой герметичную камеру 34 (Фиг.7), включающую корпус 35 с дном 36, первой стенкой 37 и второй стенкой 38 (перпендикулярные им стенки не обозначены). На корпусе 35 посредством первой резиновой манжеты 39 может быть установлена прозрачная крышка 40. Корпус 35 может быть изготовлен из нержавеющей стали, а крышка 40 - из органического стекла. Элементы крепления крышки 40 к корпусу 35 условно не показаны. Это могут быть винты, болты или скобы. В первой стенке 37 может быть установлен входной патрубок 41, подсоединенный к источнику очищенного сухого азота, аргона или другого инертного газа 42 с вентилем 43. На второй стенке 38 может быть установлен выходной патрубок 44 с вентилем 45. Внутри герметичной камеры 34 расположены модуль модификации 6, модуль образца 12 и блок 14. При этом модуль модификации 6 может быть подключен к первому криоэлементу 46, а модуль образца 12 - ко второму криоэлементу 47. Криоэлементы 46 и 47 подсоединены к первому модулю управления 48. В первом варианте каждый криоэлемент может представлять собой элемент Пельтье. Во втором варианте - элемент Пельтье с теплообменником. Первый элемент Пельтье 49 (Фиг.8) соединен с первым теплообменником 50, выполненным, например, в виде змеевика (показан условно), подсоединенного входным 51 и выходным 52 трубопроводами к источнику холодной воды 53. Первый элемент Пельтье 49 подключен ко второму модулю управления 54, к которому также может быть подключена первая термопара 55, установленная в первом изоляторе 56 в держателе 2 и соединенная с пуансоном 3. Максимальный тепловой контакт между элементом Пельтье 49 и держателем пуансона 2 обеспечивается высокой чистотой обработки (высота микронеровностей менее 1 мкм) поверхности держателя 2, находящейся в контакте с элементом Пельтье 49. Прижатие первого элемента Пельтье 49 к держателю 2, а также к теплообменнику 50 может быть осуществлено винтами и скобой (не показаны). Второй элемент Пельтье 57 может аналогичным образом быть соединен с держателем образца 7 и теплообменником 50 и иметь третий модуль управления 58 со второй термопарой 59, установленной во втором изоляторе 60 в непосредственной близости к образцу 8. Такой же теплообменник 50 может быть подключен к источнику холодной воды 53 такими же входным 51 и выходным 52 трубопроводами. Возможен также вариант, в котором модули управления 54 и 58 объединены в один модуль управления 48 (как на Фиг.7). Модули управления элементами Пельтье могут быть выполнены в виде автоматически регулируемых источников тока с цифровой обратной связью. Они могут содержать модуль АЦП, сопряженный с термопарами 55 и 59, которые сопряжены с модулем цифрового сигнального процессора и модулем цифроаналоговых преобразователей (ЦАП), соединенным с элементами Пельтье 49 и 57.
В третьем варианте базовый элемент 1 выполнен в виде вакуумной камеры 61 (Фиг.9), содержащей корпус 62, соединенный через вторую резиновую манжету 63 с прозрачной крышкой 64. Крепление крышки 64 к корпусу 62 условно не показано, материалом корпуса 62 может быть нержавеющая сталь, а крышки 64 - стекло. К корпусу 62 подключены средства откачки 65, в качестве которых может использоваться турбомолекулярный насос со средствами измерения вакуума (показаны условно).
Внутри корпуса 62 установлены модуль модификации 6 и модуль образца 12, соединенные хладопроводами 66 и 67 с криогенным вводом 68, подключенным к источнику хладагента 69 (показаны условно). Хладопроводы 66 и 67 могут быть изготовлены из жгутов, состоящих из тонких (0.1-0.2 мм) медных проволок с общим сечением около 2.5 мм*2.5 мм. Для регулировки температуры модулей 6 и 12 используют модуль поддержания температуры 70 (показан условно). Криогенный ввод 68 (Фиг.10) может представлять собой полую емкость, наполненную медными шариками и соединенную входным трубопроводом 71 и выходным трубопроводом 72 с источником хладагента 73 (см. также 69 Фиг.9, где он показан условно), который может содержать систему нагнетания, сбора и хранения хладагета (жидкого азота). Трубопроводы 71 и 72 соединены с корпусом 62 через теплоразвязки, представляющие собой тонкостенные нержавеющие трубки 74, приваренные одними концами к корпусу 62, а другими посредством фланцев 75 к трубопроводам 71 и 72. Для улучшения теплоразвязки может быть использовано несколько тонкостенных трубок и несколько фланцев для каждого трубопровода (подробнее криогенный ввод см. в [4]). Модуль поддержания температуры 70 (Фиг.9, где он показан условно) включает первый нагреватель 76 (Фиг.11), соединенный, например, посредством винтов (не показаны) с держателем пуансона 2, включающим первую термопару 55 (так же как на Фиг.8), установленную через первый изолятор 56 в непосредственной близости от пуансона 3. Второй нагреватель 77 закреплен на держателе образца 7, а вторая термопара 59 посредством второго изолятора 60 расположена в непосредственной близости от образца 8. Нагреватели 76, 77 (нихромовые спирали в изоляторе) и термопары 55 и 59 подключены к четвертому модулю управления 78. Этот модуль может быть выполнен в виде модуля автоматически регулируемых источников тока с цифровой обратной связью. Они могут содержать модуль АЦП, сопряженных с термопарами 55 и 59, которые сопряжены с модулем цифрового сигнального процессора и модулем цифроаналоговых преобразователей (ЦАП), соединенным с нагревателями 76 и 77. На фиг.11 жгуты 66 и 67 (Фиг.9) не показаны.
В одном из вариантов модуль модификации 6 (Фиг.12), модуль образца 12 и блок 14 могут быть расположены в стандартной криогенной камере 80 (показана условно) с модулем поддержания температуры и контроля 81. Криогенная камера 80 содержит корпус 82 с прозрачной крышкой 83, которая может быть установлена на нем негерметично для возможности испарения хладагента. Модуль 81 может содержать нагнетатель азота и измеритель температуры (не показаны). Криогенную камеру 80 см. подробно в [5].
В герметичной камере 34 (Фиг.7), вакуумной камере 61 (Фиг.9) и криогенной камере 80 (Фиг.12) используют сканирующий зондовый блок 14, включающий пьезосканер 85 (Фиг.13, Фиг.14) с держателем зонда 86 и зондом 87, представляющим собой кварцевый резонатор 88 с острием 89. Пьезосканер 85 закреплен на платформе 90 и установлен на основании 91 посредством направляющих, которые могут представлять собой плоскую пластину 92 и первый V-образный элемент 93. При этом шарик 94 закреплен на одном краю платформы 90 и установлен на плоской пластине 92, а шарики 95 закреплены на другом краю платформы 90 и установлены на первом V-образном элементе 93. Для удобства установки на V-образном элементе 93 шарики 95 могут иметь больший диаметр, чем шарик 94. Платформа 90 сопряжена с шаговым двигателем 96, например, с редуктором, преобразующим вращательное движение в линейное перемещение (см., например, [6]). Это сопряжение может быть осуществлено посредством зацепа 97, расположенного с возможностью взаимодействия с толкателем 98, который может перемещать платформу 90 в разные стороны по координате X. Зазоры между зацепом 97 и толкателем 98 необходимы, чтобы после перемещения зонда 87 к образцу 8 до зоны начала взаимодействия острия 89 и поверхности 11 толкатель 98 мог уйти в зазор и не мешать работе при измерении поверхности 11. Описанный сканирующий зондовый блок в совокупности с образцом 8 представляет собой сканирующий зондовый микроскоп (СЗМ), а более конкретно атомно-силовой микроскоп, описанный также в [7]. Следует заметить, что в качестве СЗМ можно использовать сканирующий туннельный микроскоп (СТМ, не показан).
Держатель образца 7 может быть сопряжен со вторым приводом 9 (Фиг.1), в качестве которого можно использовать пьезодвигатель 99 (Фиг.13, Фиг.14), закрепленный на упоре 100. Основание 91 и упор 100 установлены на базовом элементе 1. В качестве пьезодвигателя 99 можно использовать инерционный нерезонансный однокоординатный пьезодвигатель [8] или пакет плоских пьезоэлементов.
Первый привод 4 (Фиг.1) может содержать двигатель линейного перемещения (например, также шаговый двигатель с редуктором) 101 (Фиг.13) с толкателем 102, сопряженным с подвижной кареткой 103 (см. также Фиг.15), которая установлена на втором V-образном элементе 104. Двигатель 101 может быть таким же, как и двигатель 96. Они могут отличаться только толкателями. На подвижной каретке 103 закреплен держатель пуансона 2 с пуансоном 3. Каретка 103 поджата ко второму V-образному элементу 104 прижимом 105 с фрикционной вставкой 106. Прижим 105 может быть выполнен из пружинной бронзы толщиной 0.2 мм и шириной 10 мм и закреплен на втором V-образном элементе 104 винтами (не показано). Фрикционная вставка 106 может быть изготовлена из фторопласта, второй V-образный элемент 104 - из латуни, а каретка 103 - из стали. Первый V-образный элемент 93 по форме может повторять второй V-образный элемент 104, но иметь меньшие размеры V-образной канавки. Для обратного движения пуансона 3 от образца 8 используют пружины 107, установленные на базовом элементе 1 посредством стоек 108 и соединенные через планки 109 с кареткой 103.
В качестве привода держателя пуансона 5 может быть использован (Фиг.16) линейный однокоординатный привод 110 (см., например, [9]) или пакет плоских пьезоэлементов, закрепленный в выборке 111 каретки 103. В другом варианте (Фиг.17) в качестве привода 5 может быть использован привод вращения 112 (см. также [9]), закрепленный на каретке 103. На пуансон 3 может быть нанесено износостойкое антифрикционное покрытие 113, выполненное на основе перфторполиоксаалкиленкарбоновых кислот. Наиболее часто это покрытие будет наноситься на нож, выполненный из алмаза. Покрытие 113 образует сплошной монослой толщиной 2-7 нм. В отдельных случаях при наличии дефектов на поверхности алмаза покрытие может иметь нарушения сплошности с размерами 0.1-10 мкм. Подробно нанесение покрытия см. в [10, 11].
Пьезосканер 85 с зондом 87, первый шаговый двигатель 96, привод 5, пьезодвигатель 99 и второй шаговый двигатель 101 подключены к блоку управления 15. Блок управления 15 может содержать модуль центрального процессора 120 (Фиг.18), построенный, например, на основе 32-разрядного ЦСП и сопряженный с модулем цифрового синхронного детектора 121, подсоединенным к первому зонду 87, трехканальным блоком цифроаналоговых преобразователей (ЦАП) 122, контроллером 124 шаговых двигателей 96 и 101 и контроллером 125 пьезомодуля 99 и привода 5. Трехканальный блок ЦАП 122 в свою очередь сопряжен с трехканальным блоком высоковольтных усилителей 123, соединенным с пьезосканером 85. В состав модуля центрального процессора 120 может входить АЦП и набор интерфейсов для связи с другими устройствами, входящими в состав контроллера, а также с управляющим компьютером 126. Модуль цифрового синхронного детектора 121 может быть выполнен с применением высокоскоростных АЦП/ЦАП и программируемой логической интегральной схемы и содержать высокоточный усилитель сигнала и высокостабильный генератор возбуждающего сигнала, подсоединенные к первому зонду 87. Контроллер шаговых двигателей 124 может быть выполнен с поддержкой микрошагового режима и возможностью подключения концевых датчиков для каждого двигателя (не показаны).
Устройство работает следующим образом. Закрепляют пуансон 3 (Фиг.1) в держателе 2. Закрепляют образец 8 в держателе 7. В том случае, если в качестве пуансона 3 используют нож, то после осуществления среза образца 8 осуществляют анализ его гладкой поверхности 11 сканирующим зондовым блоком 14. Срез образца 8 происходит благодаря перемещению пуансона 3 по координате Y. Это перемещение осуществляется через взаимодействие толкателя 102 (Фиг.13) с кареткой 103, которая линейно перемещается по V-образному элементу 104 в сторону образца 8. Перемещение пуансона 3 в обратную сторону происходит благодаря использованию пружин 107.
При использовании атомно-силового микроскопа (Фиг.13, Фиг.14) после среза образца 8 осуществляют подвод зонда 87 (острия 89) к поверхности 11. Для этого толкатель 98 перемещает платформу 90 по координате Х в сторону образца 8. После того, как острие 89 достигает поверхности 11, толкатель 98 уходит в зазор зацепа 97, чтобы не оказывать механического воздействия на измерение поверхности 11.
Затем с помощью пьезосканера 85 выполняют растровое сканирование заданного участка поверхности 11 с заданным шагом растра. В каждой точке растра производится измерение амплитуды колебаний кварцевого резонатора 88 модулем цифрового синхронного детектора 121 (Фиг.18), после чего модуль центрального процессора 120, сопряженный с трехканальным блоком ЦАП 122 и трехканальным блоком высоковольтных усилителей 123, по заданному алгоритму обратной связи подает напряжение на пьезосканер 85, вследствие чего пьезосканер 85 перемещает зонд 87 по координате Х таким образом, чтобы амплитуда колебаний кварцевого резонатора 88 оставалась постоянной. Подаваемое на пьезосканер 85 напряжение, управляющее перемещением зонда 87 по координате X, в каждой точке растра пересчитывается модулем центрального процессора 120 в координату Х, соответствующую данной точке поверхности, что позволяет получить трехмерное изображение топографии исследуемого участка поверхности 11. Дополнительное измерение в каждой точке растра сдвига фазы колебаний кварцевого резонатора 88 относительно опорного сигнала от высокостабильного генератора возбуждающего сигнала, позволяет получить информацию о механических свойствах поверхности в соответствующих точках. Работа АСМ описана также в [12]. Для работы сканирующего туннельного микроскопа необходима проводимость поверхности 11, что для заявленного круга образцов встречается нечасто.
После завершения измерения толкатель 98 (Фиг.13) отводит зонд 87 от поверхности 11 благодаря взаимодействию его с зацепом 97. Далее проводят следующий срез образца 8 и производят следующее измерение его поверхности, в результате чего можно исследовать образцы по трем координатам. Каждый последующий срез образца 8 происходит благодаря перемещению пьезодвигателем 99 образца 8 по координате X.
Помимо среза поверхности образца 8 ножом ее можно модифицировать иглой 16 (Фиг.2). Для этого иглу 16 устанавливают по координате Y в требуемое положение относительно образца 8, после этого выдвигают пьезодвигатель 99 в сторону иглы 16 и возвращают иглу 16 в исходное положение, продавливая поверхность 11 образца 8. По скорости восстановления поверхности 11 образца 8 и остаточной величине углубления можно судить о механических (эластических и пластических) свойствах поверхности. Глубина продавливания образца 8 иглой 16 может варьироваться в диапазоне от 10 до 1000 нм.
Игла 20 (Фиг.3), локально взаимодействуя с образцом 8, может формировать углубления в нем либо отверстия в тонких пленках. Для этого после установки иглы 20 в требуемое положение по координате Y перемещают образец 8 по координате X. После этого можно также изучать восстановительные способности материалов либо величину отверстия в пленке в зависимости от глубины проникновения иглы 20 в образец 8.
При использовании пуансона 24 (Фиг.4) можно осуществлять скол образца 8, например арсенида галлия или кремния. После этого можно исследовать поверхность скола в вакуумной камере (Фиг.9).
При использовании ножа 28 (Фиг.5) можно осуществлять срез образца 8 и одновременно оставлять часть поверхности образца 8 не срезанной в том случае, если толщина среза будет меньше глубины А выборок 30. В этом случае можно проводить сравнительные исследования срезанной и не срезанной поверхности.
При использовании ножа 31 (Фиг.6) одновременно со срезом поверхности образца 8 можно формировать на ней выступами 33 бороздки, которые могут служить ориентирами для последующих измерений.
Измерения в герметичной камере (Фиг.7) позволяют охлаждать образец 8 и делать его срез в замороженном состоянии. Элементы Пельтье 49 и 57 могут охлаждать нож 3 и образец 8 до температуры -60°С. В замороженном состоянии целесообразно исследовать биологические объекты, жидкости и мягкие полимерные и эластомерные материалы. Требуемую температуру поддерживают модулями 54 и 58.
Сухой азот или другой инертный газ защищает измеряемую поверхность от образования на ней водяного льда.
Измерения в вакуумной камере (Фиг.9) в основном интересны для исследования полупроводников, например кремния или арсенида галлия, после их скола. Низкотемпературные исследования в этом случае целесообразно проводить с использованием криогенного ввода 68, которым посредством жгутов 66 и 67 охлаждают пуансон 3 и образец 8. При использовании в качестве хладагента жидкого азота образец может быть охлажден до температуры около -120°С. Температура образца 8 регулируется нагревателями 76 и 77, управляемыми модулем 78.
При использовании криокамеры (Фиг.12) степень охлаждения образца 8 определяется ее возможностями.
Использование привода 5 позволяет оказывать воздействие на зонд 89 с целью его модификации. После нефункционального изгиба зонда 89 его можно отогнуть ножом 3 в исходное положение, используя, например, привод 112. Твердое острие зонда 89 не всегда затупляется при нефункциональном взаимодействии его с «мягкой» поверхностью 11. Используя в качестве привода 5 привод вращения 112 (Фиг.17), можно контролировать качество антифрикционного покрытия 113, нанесенного на плоскость 115 вплоть до острия 114. Для этого привод 112 должен расположить плоскость 115 перпендикулярно координате X. Это улучшает качество среза.
Выполнение первого привода однокоординатным (координата Y), перемещающим пуансон 3 по направлению в сторону образца 8, а также второго привода однокоординатным (координата X), перемещающим держатель образца 7 с образцом 8 перпендикулярно координате Y повышает жесткость устройства, качество среза и соответственно точность измерения. Высокая жесткость устройства позволяет использовать образцы большего размера и массы, что расширяет его функциональные возможности.
Закрепление блока 14 на базовом элементе 1 и сопряжение его через базовый элемент 1 с образцом 8 за счет жесткости системы повышает точность измерения.
Выполнение пуансона 3 в виде ножа с режущей кромкой 13, или в виде иглы 16, ось которой расположена под углом к координате Y, или в виде изогнутой иглы 20, рабочая часть которой расположена под углом к координате Y, или со сферической кромкой 25 все это за счет использования различных способов воздействия на образец 8 расширяет функциональные возможности устройства.
Нож, который имеет на режущей кромке выборки 30, расширяет функциональные возможности устройства за счет сравнительного исследования разных поверхностей, срезанной и не срезанной. Ориентиры на срезанной поверхности образца 8 в виде канавок от выступов 33 могут применяться для выделения зон измерения. Эти ориентиры могут использоваться и при последующих срезах ножом 3 с протяженной режущей кромкой. Это может быть если толщина последующих срезов меньше глубины канавок. При этом можно сравнивать количество, например, неких фрагментов на выделенных канавками зонах.
Варианты, в которых блок 14, держатель пуансона 2 с пуансоном 3 и держатель образца 7 с образцом 8 помещены в герметичную камеру 34 или в вакуумную камеру 61, повышают точность измерения, т.к. в камерах меньше акустических и электромагнитных помех. Это также расширяет функциональные возможности устройства за счет увеличения типов измеряемых объектов.
Варианты, в которых держатель пуансона 2 и держатель объекта 7 подключены соответственно к первому криоэлементу 46 и второму криоэлементу 47, при этом первый криоэлемент 46 выполнен в виде первого элемента Пельтье 49, а второй криоэлемент 47 выполнен в виде второго элемента Пельтье 57, или первый криоэлемент 46 выполнен в виде первого элемента Пельтье 49 с теплообменником 50, а второй криоэлемент 47 выполнен в виде второго элемента Пельтье 57 с теплообменником 50, а также вариант, в котором держатель пуансона 2 подсоединен к первому хладопроводу 66, держатель объекта 7 подсоединен ко второму хладопроводу 67, при этом оба хладопровода соединены с криогенным вводом 68, или вариант, в котором блок 14, держатель пуансона 2 с пуансоном 3 и держатель образца 7 с образцом 8 помещены в криокамеру, все это расширяет функциональные возможности устройства за счет увеличения типов измеряемых объектов.
Вариант, в котором первый однокоординатный привод 4 выполнен в виде подвижной каретки 103, сопряженной с двигателем линейного перемещения 101, позволяет перемещать пуансон 3 точно относительно образца 8, что повышает качество воздействия на него и соответственно точность измерения.
Вариант, в котором второй однокоординатный привод 9 выполнен в виде пьезодвигателя 99, повышает точность перемещения образца 8 и соответственно точность измерения при состыковке последовательных срезов образца 8.
Литература
1. Заявка RU 2008130494. 24.07.2007.
2. Czerny M., Turner A.F., "ber den Astigmatismus bei Spiegelspektrometem" Zeit. Phys. 61, 792-797 (1930).
3. Патент RU 2358239. 10.06.2009.
4. Патент RU 2254622. 20.06.2005.
5. Leica Ultracut EM FC6 - brochure, Leica Mikrosysteme GmbH, Vienna Austria, 2005.
6. Motorized Stages and Controllers Catalog, Standa Ltd., Vilnius, Lithuania, 2009 (www.standa.lt/PDF/motorized_stages_controllers.pdf).
7. Патент RU 2233490. 27.07.2004.
8. К.Spanner, O.Vyshnevskyy, W.Wischnewskiy, "New Linear Ultrasonic Motor for Precision Mechatronics Systems", Physik Instrumente GmbH & Co. KG, Karlsruhe, Germany, 2006 (www.pi.ws).
9. www.attocube.com.
10. Рябинин Н.А. и др. Долговечность, ресурсосбережение за счет применения эпиламирующих составов. Индустрия №1(3). С.Петербург. 2004.
11. Новое в технологии соединений фтора. Пер. с японского под ред. И.Исикавы, 1984. 592 с.
12. Roland Wiesendanger (Ed.) "Scanning probe microscopy: analytical methods", ISBN 3-540-63815 Springer-Verlag Berlin Heidelberg, 1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ НАНОТОМОГРАФ С МОДУЛЕМ ОПТИЧЕСКОГО АНАЛИЗА | 2016 |
|
RU2645437C1 |
| Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности образца | 2017 |
|
RU2653190C1 |
| МАЛОГАБАРИТНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2004 |
|
RU2258901C1 |
| КРИОГЕННЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2004 |
|
RU2271583C1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО ЛОКАЛЬНОГО ВОЗДЕЙСТВИЯ | 2016 |
|
RU2617542C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| СПОСОБ ИССЛЕДОВАНИЯ ТРЕХМЕРНЫХ СТРУКТУР ПОСРЕДСТВОМ СКАНИРУЮЩЕЙ ОПТИЧЕСКОЙ ЗОНДОВОЙ НАНОТОМОГРАФИИ | 2017 |
|
RU2680726C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ СРЕЗАНИЯ ТОНКИХ СЛОЕВ ОБЪЕКТА | 2004 |
|
RU2287129C2 |
Устройство предназначено для исследования поверхности образцов после модификации их поверхности. Сканирующий зондовый микроскоп с нанотомом включает базовый элемент, на котором установлен держатель пуансона с пуансоном, сопряженный с первым приводом, держатель образца с образцом, сопряженный со вторым приводом, и сканирующий блок, имеющий возможность сопряжения с образцом. Первый привод выполнен однокоординатным (координата Y), перемещающим пуансон по направлению в сторону образца. Второй привод выполнен однокоординатным (координата X), перемещающим держатель образца с образцом перпендикулярно координате Y. Технический результат - повышение точности измерения, расширение функциональных возможностей устройства. 20 з.п. ф-лы, 18 ил.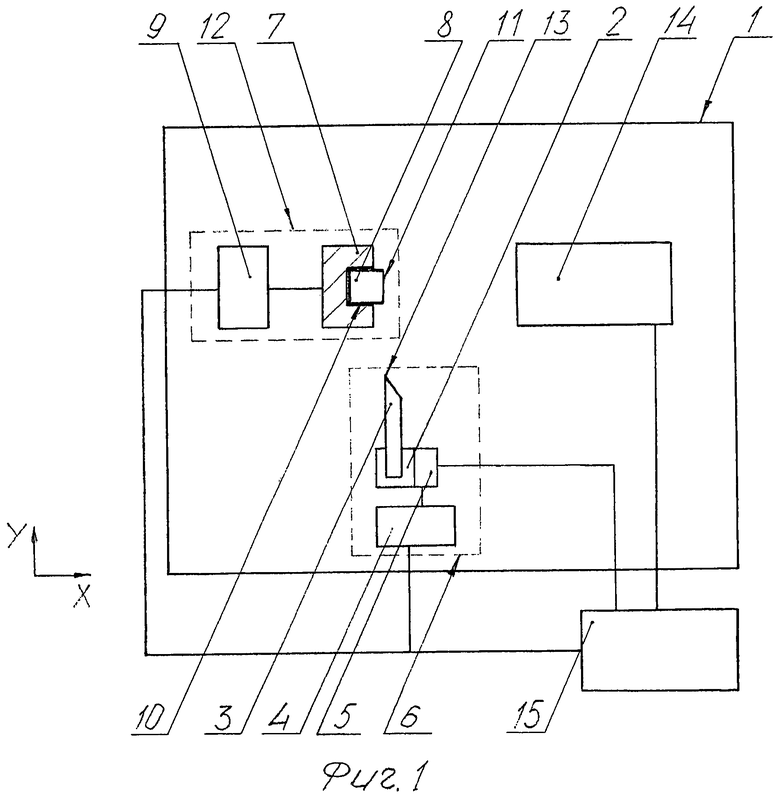
1. Сканирующий зондовый микроскоп с нанотомом, включающий базовый элемент (1), на котором установлен держатель пуансона (2) с пуансоном (3), сопряженный с первым приводом (4), держатель образца (7) с образцом (8), сопряженный со вторым приводом (9), и сканирующий зондовый блок (14), имеющий возможность сопряжения с образцом (8), отличающийся тем, что первый привод (4) выполнен однокоординатным (координата Y), перемещающим пуансон (3) по направлению в сторону образца (8), а также второй привод (9) выполнен однокоординатным (координата X), перемещающим держатель образца (7) с образцом (8) перпендикулярно координате Y.
2. Устройство по п.1, отличающееся тем, что в него введен привод держателя пуансона (5), сопряженный с держателем пуансона (2).
3. Устройство по п.1, отличающееся тем, что пуансон (3) выполнен в виде ножа с режущей кромкой (13).
4. Устройство по п.1, отличающееся тем, что пуансон (3) выполнен в виде иглы (16), ось которой расположена под углом к координате Y.
5. Устройство по п.1, отличающееся тем, что пуансон (3) выполнен в виде изогнутой иглы (20), рабочая часть (22) которой расположена под углом к координате Y.
6. Устройство по п.1, отличающееся тем, что пуансон (24) имеет сферическую кромку (25).
7. Устройство по п.3, отличающееся тем, что нож (28) имеет на режущей кромке (29) выборки (30).
8. Устройство по п.3, отличающееся тем, что нож (31) имеет на режущей кромке (32) выступы (33).
9. Устройство по п.1, отличающееся тем, что сканирующий зондовый блок (14), держатель пуансона (2) с пуансоном (3) и держатель образца (7) с образцом (8) помещены в герметичную камеру (34).
10. Устройство по п.1, отличающееся тем, что сканирующий зондовый блок (14), держатель пуансона (2) с пуансоном (3) и держатель образца (7) с образцом (8) помещены в вакуумную камеру (61).
11. Устройство по п.9, отличающееся тем, что держатель пуансона (2) и держатель образца (7) подключены соответственно к первому криоэлементу (46) и второму криоэлементу (47).
12. Устройство по п.9, отличающееся тем, что первый криоэлемент (46) выполнен в виде первого элемента Пельтье (49), а второй криоэлемент (47) выполнен в виде второго элемента Пельтье (57).
13. Устройство по п.9, отличающееся тем, что первый криоэлемент (46) выполнен в виде первого элемента Пельтье (49) с теплообменником (50), а второй криоэлемент (47) выполнен в виде второго элемента Пельтье (57) с теплообменником (50).
14. Устройство по п.10, отличающееся тем, что держатель пуансона (2) подсоединен к первому хладопроводу (66), держатель образца (7) подсоединен ко второму хладопроводу (67), при этом оба хладопровода соединены с криогенным вводом (68).
15. Устройство по п.1, отличающееся тем, что сканирующий зондовый блок (14), держатель пуансона (2) с пуансоном (3) и держатель образца (7) с образцом (8), помещены в криокамеру (80).
16. Устройство по п.1, отличающееся тем, что первый однокоординатный привод (4) выполнен в виде подвижной каретки (103), сопряженной с двигателем линейного перемещения (101).
17. Устройство по п.1, отличающееся тем, что второй однокоординатный привод (9) выполнен в виде пьезодвигателя (99).
18. Устройство по п.1, отличающееся тем, что сканирующий зондовый блок (14) содержит пьезосканер (85) с зондом (87), сопряженный с шаговым двигателем (96) и установленный подвижно по координате Х на базовом элементе (1).
19. Устройство по п.1, отличающееся тем, что привод держателя пуансона (5) выполнен в виде линейного однокоординатного привода (110).
20. Устройство по п.1, отличающееся тем, что привод держателя пуансона (5) выполнен в виде привода вращения (112).
21. Устройство по п.1, отличающееся тем, что пуансон (3) покрыт противоизносным антифрикционным покрытием (113).
| RU 2008130494 А, 10.02.2010 | |||
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ СРЕЗАНИЯ ТОНКИХ СЛОЕВ ОБЪЕКТА | 2004 |
|
RU2287129C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| US 7109482 B2, 19.09.2006. | |||

