Изобретение относится к измерительной технике, а более конкретно к сканирующим зондовым микроскопам, комбинированным с оптическими микроскопами и адаптированным для измерения поверхности объекта (образца), полученной после механической модификации этой поверхности, например после среза микротомом.
Известен сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности объекта, содержащий основание, на котором с возможностью функциональной подвижки установлен блок пьезосканера, с пьезосканером, продольную ось O-O1, расположенную вдоль первой координаты X, при этом на закреплен держатель объекта с объектом, имеющим измерительную поверхность, расположенную в плоскости второй координаты Y и третьей координаты Z. На блоке пьезосканера установлен с возможностью подвижки вдоль первой координаты X блок зонда с держателем зонда, в котором закреплен зонд, имеющий возможность взаимодействия с измерительной поверхностью объекта. На основании установлен также блок пуансона с пуансоном, имеющим режущую кромку, размещенный на двухкоординатном приводе пуансона, при этом режущая кромка расположена вдоль второй координаты Y и имеет возможность взаимодействия с объектом. Пьезосканер имеет возможность перемещения держателя объекта с объектом по первой координате X, по второй координате Y, по третьей координате Z и обеспечивает сканирование объекта в плоскости второй координаты Y и третьей координаты Z, а также его перемещение вдоль первой координаты X [1]. В одном из вариантов сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности объекта и сканирования, может быть снабжен криокамерой. Основной недостаток этого устройства заключается в том, что в нем отсутствуют средства наблюдения за поверхностью объекта в процессе ее среза.
Известен также сканирующий зондовый микроскоп с оптическим блоком, содержащий основание, на котором установлен блок пьезосканера, на котором закреплен пьезосканер, включающий держатель объекта с объектом, имеющим измеряемую поверхность, при этом пьезосканер обеспечивает перемещения держателя объекта с объектом по первой координате X, по второй координате Y и по третьей координате Z, вторая координата Y и третья координата Z образуют плоскость сканирования объекта относительно зонда, а первая координата X перпендикулярна плоскости сканирования объекта, при этом блок пьезосканера включает первый привод, обеспечивающий его перемещение с пьезосканером, держателем объекта и объектом вдоль третьей координаты Z, на основании установлен также блок зонда с держателем зонда, в котором закреплен зонд, имеющий возможность взаимодействия с измеряемой поверхностью объекта, при этом блок зонда включает второй привод, обеспечивающий перемещения держателя зонда с зондом вдоль первой координаты X, и включает третий привод, обеспечивающий перемещения держателя зонда с зондом вдоль второй координаты Y, на основании установлен также блок пуансона с пуансоном, имеющим режущую кромку, при этом блок пуансона включает четвертый привод, обеспечивающий его перемещение вдоль первой координаты X, и пятый привод, обеспечивающий его перемещение вдоль второй координате Y, а режущая кромка расположена вдоль второй координаты Y и имеет возможность взаимодействия с объектом, на основании установлен также оптический блок, оптически сопряженный с держателем объекта, с измеряемой поверхностью объекта, с зондом и имеющий оптическую ось О-O1, расположенную вдоль первой координаты X, при этом блок зонда расположен между держателем объекта с объектом и оптическим блоком [2]. Это устройство выбрано в качестве прототипа предложенного решения.
Недостаток этого устройства заключается в невозможности наблюдения объекта в процессе его среза, а также в невозможности его оптических исследований.
Технический результат изобретения заключается в обеспечении возможности наблюдения объекта в процессе его среза. Динамическая картина среза дает наиболее объективную картину характера измеряемой поверхности объекта. Это позволяет оптимально выбирать области зондовых исследований и повышать их разрешение. Дополнительный технический результат заключается в возможности оптических исследований срезанной поверхности объекта и фрагментов объекта, оставшихся на поверхности пуансона. Это расширяет функциональные возможности устройства.
Указанные технические результаты достигаются тем, что в сканирующем зондовом нанотомографе с модулем оптического анализа содержащем основание, на котором установлен блок пьезосканера, на котором закреплен пьезосканер, включающий держатель объекта с объектом, имеющим измеряемую поверхность, при этом пьезосканер обеспечивает перемещения держателя объекта с объектом по первой координате X, по второй координате Y и по третьей координате Z, вторая координата Y и третья координата Z образуют плоскость сканирования объекта относительно зонда, а первая координата X перпендикулярна плоскости сканирования объекта, при этом блок пьезосканера включает первый привод, обеспечивающий его перемещение с пьезосканером, держателем объекта и объектом вдоль третьей координаты Z, на основании установлен также блок зонда с держателем зонда, в котором закреплен зонд, имеющий возможность взаимодействия с измеряемой поверхностью объекта, при этом блок зонда включает второй привод, обеспечивающий перемещения держателя зонда с зондом вдоль первой координаты X, и включает третий привод, обеспечивающий перемещения держателя зонда с зондом вдоль второй координаты Y, на основании установлен также блок пуансона с пуансоном, имеющим режущую кромку, при этом блок пуансона включает четвертый привод, обеспечивающий его перемещение вдоль первой координаты X и пятый привод, обеспечивающий его перемещение вдоль второй координате Y, а режущая кромка расположена вдоль второй координаты Y и имеет возможность взаимодействия с объектом, на основании установлен также оптический блок, оптически сопряженный с держателем объекта, с измеряемой поверхностью объекта, с зондом и имеющий оптическую ось О-O1, расположенную вдоль первой координаты X, при этом блок зонда расположен между держателем объекта с объектом и оптическим блоком, оптический блок выполнен в виде модуля оптического анализа, включающего объектив и анализатор, оптически сопряженные друг с другом, в сканирующий зондовый нанотомограф с модулем оптического анализа введен шестой привод, установленный на основании, на котором закреплен модуль оптического анализа, при этом шестой привод обеспечивает перемещение модуля оптического анализа вдоль третьей координаты Z с возможностью изменения угла относительно оптической оси O-O1.
Существует вариант, в котором шестой привод имеет возможность перемещения модуля оптического анализа вдоль третьей координаты и изменения угла относительно оптической оси O-O1 синхронно с перемещением пьезосканера с держателем объекта и объектом первым приводом вдоль третьей координаты Z.
Существует вариант, в котором в устройство введен котировочный модуль по первой координате X, обеспечивающий также возможность изменения угла относительно оптической оси O-O1 и закрепленный на шестом приводе, при этом модуль оптического анализа закреплен на юстировочном модуле по первой координате X.
Существует вариант, в котором котировочный модуль по первой координате X выполнен в виде третьего фланца, сопряженного с четвертым фланцем посредством первого эксцентрика и второго эксцентрика, установленных на третьем фланце. При этом в него введены первый установочный винт 86 и два вторых установочных винта 87, обеспечивающих возможность изменения угла четвертого фланца 75 относительно оптической оси O-O1.
Существует вариант, в котором анализатор выполнен в виде ПЗС-матрицы.
Существует вариант, в котором анализатор выполнен в виде спектрометра.
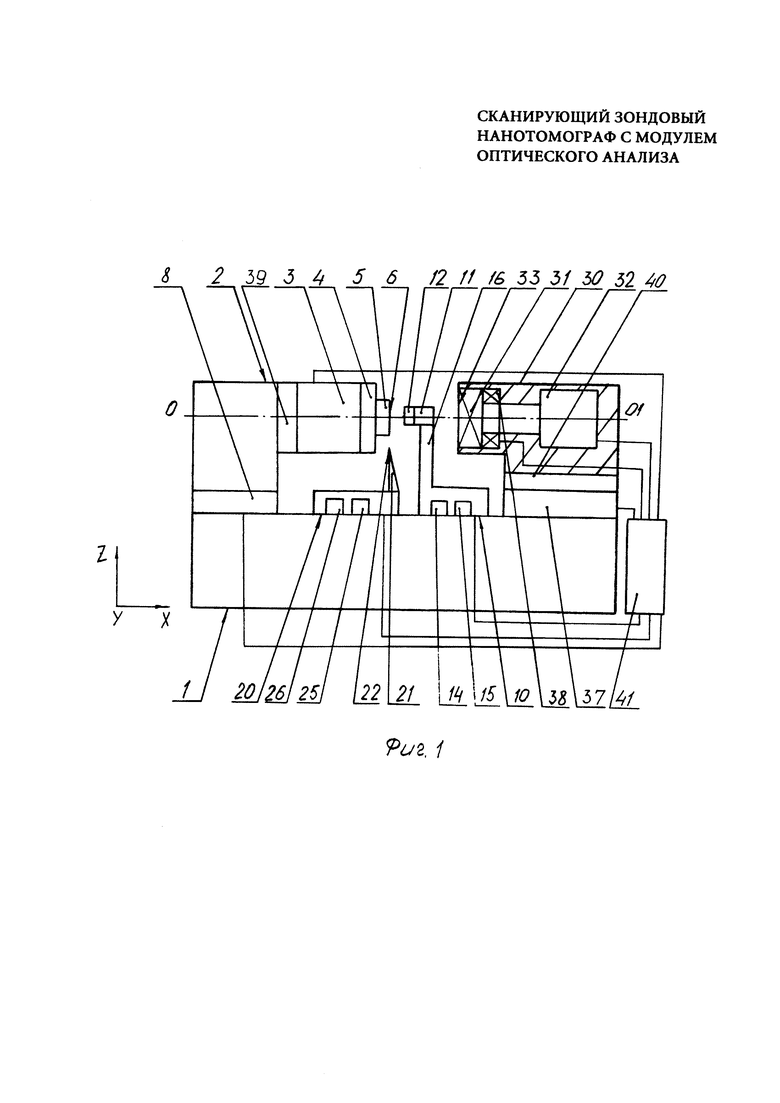
На фиг. 1 изображена компоновочная схема сканирующего зондового нанотомографа с модулем оптического анализа.
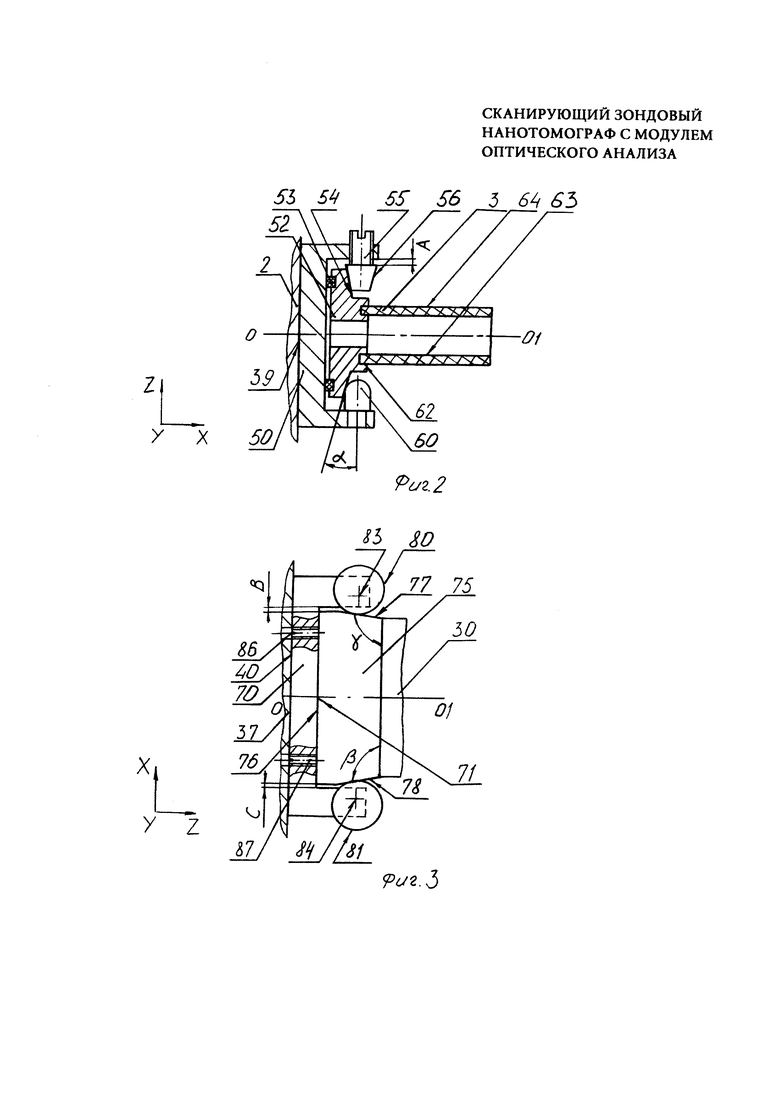
На фиг. 2 изображен вариант котировочного модуля по второй координате Y.
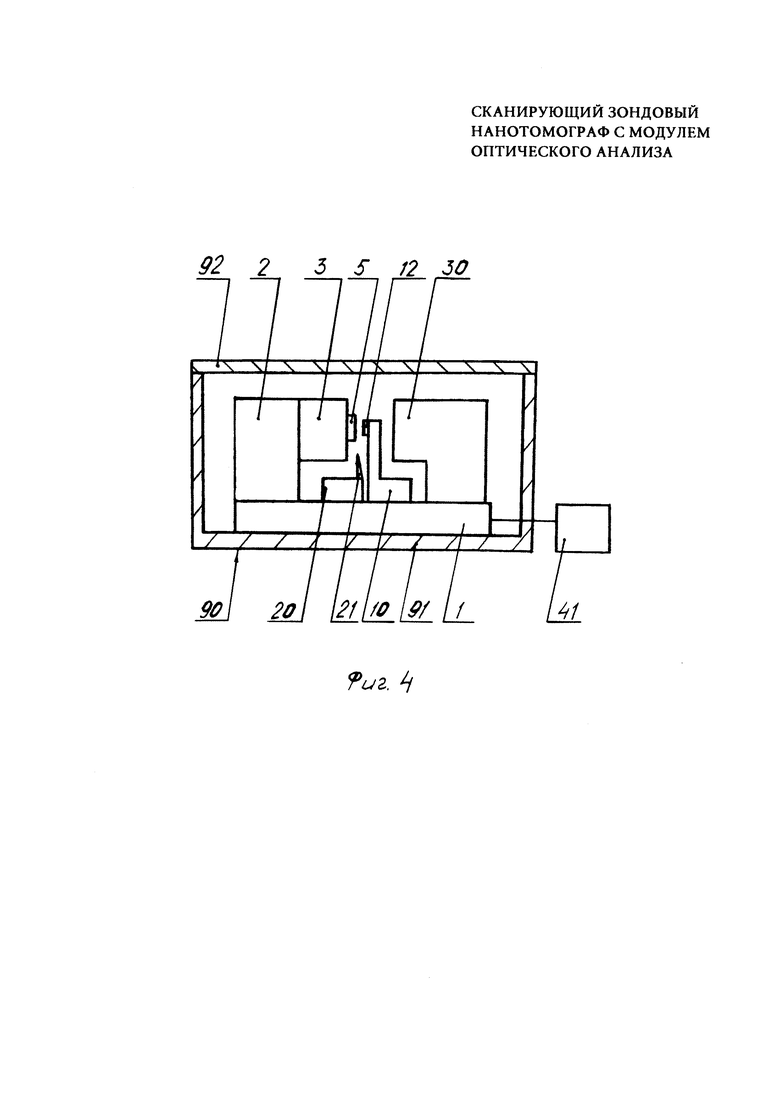
На фиг. 3 изображен вариант юстировочного модуля по первой координате X.
На фиг. 4 изображен вариант, в котором устройство расположено внутри криогенной камеры.
Сканирующий зондовый нанотомограф с модулем оптического анализа, содержит основание 1, на котором установлен блок пьезосканера 2. На блоке пьезосканера 2 закреплен пьезосканер 3, включающий держатель объекта 4 с объектом 5, имеющим измеряемую поверхность 6. Пьезосканер 3 обеспечивает перемещения держателя объекта 4 с объектом 5 по первой координате X, по второй координате Y и по третьей координате Z. Вторая координата Y и третья координата Z образуют плоскость сканирования объекта 5. Первая координата X перпендикулярна плоскости сканирования объекта 5. Блок пьезосканера 2 включает первый привод 8, обеспечивающий его перемещение с пьезосканером 3, держателем объекта 4 и объектом 5 вдоль третьей координаты Z. В качестве первого привода 8 могут быть использованы, например, рычажные приводы по [1, 2] либо линейный однокоординатный пьезопривод ANPz101 фирмы Attocube с диапазоном перемещения более 5 мм [3], а также линейный привод М-451 фирмы Physik Instrumente [4]. На основании 1 установлен также блок зонда 10 с держателем зонда 11, в котором закреплен зонд 12, имеющий возможность взаимодействия с измеряемой поверхностью 6 объекта 5. В качестве зонда 12 может быть использована либо игла туннельного микроскопа, либо кварцевый резонатор с иглой, описанные в [1, 2]. Блок зонда 10 включает второй привод 14, обеспечивающий перемещения держателя зонда 11 с зондом 12 вдоль первой координаты X, и включает третий привод 15, обеспечивающий перемещения держателя зонда 11 с зондом 12 вдоль второй координаты Y. В качестве второго привода 14 и третьего привода 15 могут быть использованы приводы с толкателями, описанные в [1], а также линейные пьезоприводы ANPz101 фирмы Attocube [3]. На основании 1 установлен также блок пуансона 20 с пуансоном 21, имеющим режущую кромку 22. Блок пуансона 20 включает четвертый привод 25, обеспечивающий его перемещение вдоль первой координаты X и пятый привод 26, обеспечивающий его перемещение вдоль второй координате Y. А режущая кромка 22 расположена вдоль второй координаты Y и имеет возможность взаимодействия с объектом 4. Четвертый привод 25 и пятый привод 26 являются стандартными компонентами криотомов и микротомов фирмы Leica. На основании 1 установлен также модуль оптического анализа 30, оптически сопряженный с держателем объекта 4, с измеряемой поверхностью 6 объекта 5, и имеющий оптическую ось O-O1, расположенную вдоль первой координаты X. Модуль оптического анализа 30 включает объектив 31 и анализатор 32, оптически сопряженные друг с другом. В качестве объектива 31 целесообразно использовать, например, объектив 100Х Mitutoyo Plan Аро с рабочим отрезком 11 мм [5]. Блок зонда 10 расположен между держателем объекта 4 с объектом 5 и модулем оптического анализа 30. В сканирующий зондовый нанотомограф с модулем оптического анализа введен шестой привод 37, установленный на основании 1, на котором закреплен модуль оптического анализа 30. В качестве шестого привода 37 можно использовать три линейных привода М-451 фирмы Physik Instrumente [4], установленные под углом 120 градусов относительно друг друга, которые обеспечивают перемещение модуля оптического анализа 30 вдоль третьей координаты Z и с возможностью изменения угла относительно оптической оси O-O1.
Существует вариант, в котором шестой привод 37 имеет возможность перемещения модуля оптического анализа 30 вдоль третьей координаты Z и изменения угла относительно оптической оси O-O1 синхронно с перемещением пьезосканера 3 с держателем объекта 4 и объектом 5 первым приводом 8 вдоль третьей координаты Z. В этом случае целесообразно в качестве первого привода 8 и трех линейных приводов шестого привода 37 использовать одинаковые приводы, например, М-451 фирмы Physik Instrumente [4].
Существует вариант, в котором в сканирующий зондовый нанотомограф с модулем оптического анализа введен седьмой привод 38, обеспечивающий перемещение объектива 31 вдоль первой координаты X. В качестве седьмого привода 38 можно использовать или линейные пьезоприводы фирмы Attocube типа ANPz 101 [3], или кольцевые пьезоприводы фирмы Physik Instrumente типа Р-025, Р-080 [6].
Существует вариант, в котором в сканирующий зондовый нанотомограф с модулем оптического анализа введен котировочный модуль по второй координате Y 39, закрепленный на блоке пьезосканера 2, при этом пьезосканер 3 закреплен на юстировочном модуле по второй координате Y 39. Закрепление юстировочного модуля по второй координате Y 39 на блоке пьезосканера 2 может быть осуществлено посредством крепежных винтов (не показаны).
Существует вариант, в котором котировочный модуль по второй координате Y 39 выполнен в виде первого фланца 50 (фиг. 2), сопряженного со вторым фланцем 52 через опоры 53 посредством конусного подвижного упора 55 и шаровой опоры 60, установленных на первом фланце 50. Первый фланец 50 целесообразно изготавливать из стали 40X13, второй фланец 52 - из титана, вкладыши 53 и шаровую опору 60 - из бронзы, подвижный упор 55 из стали 12Х18Н10Т. На конусной поверхности 56 подвижного упора 55 могут быть сформированы микронасечки высотой 5-50 мкм, расположенные вдоль продольной оси подвижного упора 55. Подвижный упор 55 может иметь резьбу М4 с шагом 0.5 мм. Величина А может быть в диапазоне 4-6 мм. Угол α может быть в диапазоне 5-15 градусов. Пьезосканер 3 на втором фланце 52 может быть закреплены клеем, например эпоксидной смолой, либо установлен по плотной посадке в пазу 62 внутренней поверхностью 63 и наружной поверхностью 64. В этом случае второй фланец 52 должен быть изготовлен из титана, имеющего близкий коэффициент расширения к коэффициенту расширения пьезокерамики пьезосканера 3.
Существует вариант, в котором в сканирующий зондовый нанотомограф с модулем оптического анализа введен котировочный модуль по первой координате X 40 (фиг. 1) с возможностью изменения угла относительно оптической оси O-O1, закрепленный на шестом приводе 37, при этом модуль оптического анализа 30 закреплен на юстировочном модуле по первой координате X 40. Закрепление юстировочного модуля по первой координате X 40 на шестом приводе 37 может быть осуществлено посредством крепежных винтов (не показаны). Закрепление модуля оптического анализа 30 на юстировочном модуле по первой координате X 40 может быть осуществлено посредством крепежных винтов (не показаны).
Существует вариант, в котором котировочный модуль по первой координате X 40 (фиг. 3) выполнен в виде третьего фланца 70 с первой поверхностью 71, сопряженного с четвертым фланцем 75 со второй поверхностью 76 посредством первого эксцентрика 80 и второго эксцентрика 81, установленных на третьем фланце 70. Высота микронеровностей первой поверхности 71 третьего фланца 70 и второй поверхности 76 четвертого фланца 75 не должно быть более 1 мкм. В качестве материала первого эксцентрика 80 и второго эксцентрика 81 можно использовать титан. Высота микронеровностей первой скошенной поверхности 77 и второй скошенной поверхности 78 четвертого фланца 75 может быть в диапазоне 1-10 мкм. Углы β и γ могут быть в диапазоне 3-7 градусов. Возможность изменения угла относительно оптической оси O-O1 может быть обеспечена использованием первого установочного винта 86 и разнесенных по координате X двух вторых установочных винтов 87.
Существует вариант, в котором анализатор 32 (фиг. 1) выполнен в виде ПЗС-матрицы, например, типа Clara компании ANDOR [7].
Существует вариант, в котором анализатор 32 выполнен в виде спектрометра, например, типа Shamrock 750 компании ANDOR [8].
В одном из вариантов устройство снабжено криокамерой 90 (фиг. 4) с корпусом 91 и крышкой 92, при этом основание 1 с расположенными на нем элементами размещено в криокамере 90.
Сканирующий зондовый нанотомограф с модулем оптического анализа работает следующим образом. На пьезосканер 3, а именно на держатель объекта 4, устанавливают объект 5, имеющий измеряемую поверхность 6. В блок зонда 10, а именно в держатель зонда 11, закрепляют зонд 12, имеющий возможность взаимодействия с измеряемой поверхностью 6 объекта 5. В блоке пуансона 20 закрепляют пуансон 21, имеющий режущую кромку 22. При этом режущая кромка 22 должна быть расположена вдоль второй координаты Y и иметь возможность взаимодействия с объектом 4. Модуль оптического анализа 30 должен быть оптически сопряжен с измеряемой поверхностью 6 объекта 5. Первый привод 8 обеспечивает перемещение пьезосканера 3 с держателем объекта 4 и объектом 5 вдоль третьей координаты Z и срез его пуансоном 21.
Шестой привод 37 осуществляет перемещение модуля оптического анализа 30 вдоль третьей координаты Z и с возможностью изменения угла относительно оптической оси O-O1 синхронно с перемещением пьезосканера 3 с держателем объекта 4 и объектом 5 первым приводом 8. При этом осуществляется наблюдение за измеряемой поверхностью 6 объекта 5.
Седьмой привод 38 обеспечивает перемещение объектива 31 вдоль первой координаты X и позволяет оперативно подстраивать фокусировку на измеряемую поверхностью 6 объекта 5.
Блок пуансона 20 четвертым приводом 25 обеспечивает его перемещение вдоль первой координаты X и пятым приводом 26 обеспечивает его перемещение вдоль второй координате Y. При этом происходит выбор толщины среза по первой координате X и зоны среза по второй координате Y. Возможно также пятым приводом 26 выводить пуансон 21 из зоны установки зонда 12 при его закреплении в держателе зонда 11.
Блок зонда 10 посредством второго привода 14 обеспечивает перемещение держателя зонда 11 с зондом 12 вдоль первой координаты X к объекту 5 для его последующих исследований. Третий привод 15 обеспечивает перемещение держателя зонда 11 с зондом 12 вдоль второй координаты Y для выбора зоны исследований на измеряемой поверхности 6 объекта 5.
Пьезосканер 3 обеспечивает перемещения держателя объекта 4 с объектом 5 по первой координате X, по второй координате Y и по третьей координате Z. Вторая координата Y и третья координата Z образуют плоскость сканирования объекта 4 относительно зонда 12 в процессе исследования измеряемой поверхности 6.
Котировочный модуль по второй координате Y 39 осуществляет установочное перемещение пьезосканера 3 с объектом 5 в выбранную зону исследования модулем оптического анализа 30.
В момент зажима второго фланца 52 на первом фланце 50 может происходить сдвиг в диапазоне 1 мм второго фланца 52 по координате Y при сохранении надежности фиксации второго фланца 52.
Котировочный модуль по первой координате X 40 осуществляет установочное перемещение модуля оптического анализа 30 по первой координате X, а также с возможностью изменения угла относительно оптической оси O-O1.
Вращая первый эксцентрик 80 и второй эксцентрик 81 соответственно вокруг осей 83 и 84, можно и прижимать плоскость 76 четвертого фланца 75 к поверхности 71 третьего фланца 70, и перемещать четвертый фланец 75 вдоль первой координаты X.
Анализатор 32, выполненный в виде ПЗС-матрицы, позволяет осуществлять наблюдение измеряемой поверхности 6 объекта 5 как в процессе среза, так и после него. Также он позволяет наблюдать фрагменты срезанного объекта на пуансоне и качество его режущей кромки 22.
Анализатор 32, выполненный в виде спектрометра, позволяет осуществлять измерение локальной спектральной информации на измеряемой поверхности 6 объекта 5 как в процессе среза, так и после него, а также на фрагментах срезанного объекта на пуансоне 21.
То, что в сканирующем зондовом нанотомографе с модулем оптического анализа оптический блок 30 выполнен в виде модуля оптического анализа 30, включающего объектив 31 и анализатор 32, оптически сопряженные друг с другом, при этом в сканирующий зондовый нанотомограф с модулем оптического анализа введен шестой привод 37, установленный на основании 1, на котором закреплен модуль оптического анализа 30, при этом шестой привод 37 обеспечивает перемещение модуля оптического анализа 30 вдоль третьей координаты Z с возможностью изменения угла относительно оптической оси O-O1 - создает возможность наблюдения объекта 5 в процессе его среза. Динамическая картина среза дает наиболее объективную картину характера измеряемой поверхности 6 объекта 5. Это позволяет оптимально выбирать области зондовых исследований на измеряемой поверхности 6 и повышать их разрешение. Дополнительный технический результат заключается в возможности оптических исследований срезанной поверхности объекта 5 и фрагментов объекта 5, оставшихся на поверхности пуансона 21. Это расширяет функциональные возможности устройства. Возможность изменения угла относительно оптической оси O-O1 увеличивает разрешение по всему полю наблюдения.
То, что шестой привод 37 имеет возможность перемещение модуля оптического анализа 30 вдоль третьей координаты Z с возможностью изменения угла относительно оптической оси O-O1 синхронно с перемещением пьезосканера 3 с держателем объекта 4 и объектом 5 первым приводом 8 повышает точность оптического наблюдения по всему полю наблюдения объекта 5 во время его среза. Это с большей точностью позволяет оптимально выбирать области зондовых исследований и повышать их разрешение.
То, что в сканирующий зондовый нанотомограф с модулем оптического анализа введен котировочный модуль по первой координате X 40, обеспечивающий также возможность изменения угла относительно оптической оси O-O1, закрепленный на шестом приводе 37, при этом модуль оптического анализа 30 закреплен на юстировочном модуле по первой координате X 40, позволяет отводить модуль оптического анализа 30 от объекта 5 (от держателя зонда 11 с зондом 12) для замены зонда 12. Учитывая, что фокусное расстояние объектива 31 находится в диапазоне от 5 до 11 мм, а размеры зонда 12 с держателем зонда 11 по координате X составляют не менее 3 мм, этот отвод упрощает замену зонда 12, повышает его сохранность и, соответственно, разрешение зондовых измерений объекта 5 (измеряемой поверхности 6), а также упрощает эксплуатацию устройства.
То, что котировочный модуль по первой координате X 40 выполнен в виде третьего фланца 70, сопряженного с четвертым фланцем 75 посредством первого эксцентрика 80 и второго эксцентрика 81, установленных на третьем фланце 70, обеспечивает возможность точного безлюфтового отвода и подвода модуля оптического анализа 30 к держателю зонда 11 с зондом 12. Это исключает несанкционированное касание модулем оптического анализа 30 держателя зонда 11, исключает несанкционированное касание зондом 12 объекта 5, повышает сохранность зонда 12 и, соответственно, разрешение зондовых измерений объекта 5 (измеряемой поверхности 6). Использование первого эксцентрика 80 и второго эксцентрика 81 обеспечивает также возможность быстрого съема модуля оптического анализа 30 с основания 1. Это дополнительно упрощает замену зонда 12 благодаря увеличению зоны для манипуляций с ним. Поджим четвертого фланца 75 к третьему фланцу 70 с помощью первого эксцентрика 80 и второго эксцентрика 81 обеспечивает максимальную выборку люфтов подвижного соединения четвертого фланца 75 и третьего фланца 70, уменьшает нефункциональные перемещения модуля оптического анализа 30 и повышает точность оптических наблюдений и оптических исследований объекта 5 (измеряемой поверхности 6). Возможность изменения угла относительно оптической оси O-O1 первым установочным винтом 86 и двумя вторыми установочными винтами 87 повышает разрешение на краях поля наблюдения.
То, что анализатор 32 выполнен в виде ПЗС-матрицы, позволяет наблюдать качество режущей кромки 22 пуансона 21 при различных углах наблюдения. Качество режущей кромки 22 влияет на качество измеряемой поверхности 6. Своевременная замена пуансона 21 обеспечивает высокое качество измеряемой поверхности 6 и высокое разрешение зондовых измерений объекта 5 (измеряемой поверхности 6).
То, что анализатор 32 выполнен в виде спектрометра, позволяет исследовать путем анализа получаемой спектральной информации локальный химический состав измеряемой поверхности 6 объекта 5 при различных углах расположения анализатора 32, как в процессе среза так и после него, а также локальный химический состав фрагментов срезанного объекта на пуансоне 21. Это расширяет функциональные возможности устройства.
Источники информации
1. ЕР 2482080 А1.
2. RU 2389032.
3. www.attocube.com/attomotion/premium-line/anpz101/.
4. www.physikinstrumente.com/product-detail-page/m-451-702450.html.
5. www.edmundoptics.com/microscopy/infinity-corrected-objectives/mitutoyo-nir-nuv-uv-infinity-corrected-objectives/46409/.
6. www.physikinstrumente.com/product-detail-page/p-010xxh-p-025xxh-102800.html.
7. http://www.andor.com/scientific-cameras/clara-interline-ccd-series/clara.
8. //www.andor.com/spectrograph/shamrock-spectrograph-series/shamrock-750.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности образца | 2017 |
|
RU2653190C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С НАНОТОМОМ | 2010 |
|
RU2427846C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2006 |
|
RU2366008C2 |
| СПОСОБ СКАНИРОВАНИЯ ОБЪЕКТОВ С ПОМОЩЬЮ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2004 |
|
RU2282902C2 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО ЛОКАЛЬНОГО ВОЗДЕЙСТВИЯ | 2016 |
|
RU2617542C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ТРЕХМЕРНЫХ СТРУКТУР ПОСРЕДСТВОМ СКАНИРУЮЩЕЙ ОПТИЧЕСКОЙ ЗОНДОВОЙ НАНОТОМОГРАФИИ | 2017 |
|
RU2680726C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА В РЕЖИМЕ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2015 |
|
RU2597959C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2008 |
|
RU2389032C2 |
Изобретение относится к области зондовых измерений объектов после их микро- и нанотомирования. Сущность изобретения заключается в том, что в сканирующий зондовый нанотомограф с модулем оптического анализа, содержащий основание 1, на котором установлен блок пьезосканера 2, блок зонда 10 и блок пуансона 20 введен шестой привод 37, установленный на основании 1, на котором закреплен модуль оптического анализа 30, включающий объектив 31 и анализатор 32, оптически сопряженные друг с другом, при этом шестой привод 37 обеспечивает перемещение модуля оптического анализа 30 вдоль третьей координаты Z с возможностью изменения угла относительно оптической оси. Технический результат заключается в обеспечении возможности оптических наблюдений и исследований объектов в процессе их среза, что расширяет функциональные возможности устройства. 5 з.п. ф-лы, 4 ил.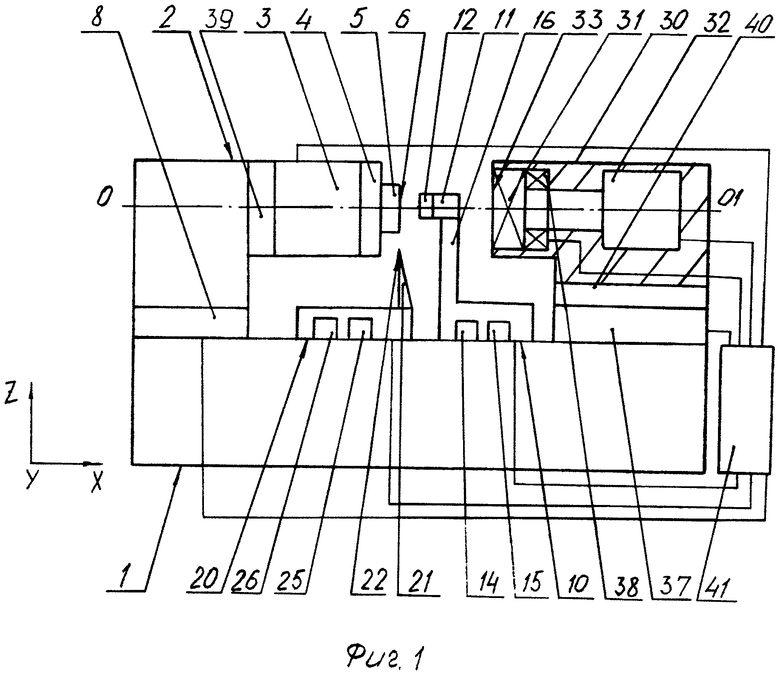
1. Сканирующий зондовый нанотомограф с модулем оптического анализа, содержащий основание (1), на котором установлен блок пьезосканера (2), на котором закреплен пьезосканер (3), включающий держатель объекта (4) с объектом (5), имеющим измеряемую поверхность (6), при этом пьезосканер (3) обеспечивает перемещения держателя объекта (4) с объектом (5) по первой координате X, по второй координате Y и по третьей координате Z, вторая координата Y и третья координата Z образуют плоскость сканирования объекта (5) относительно зонда (12), и первая координата X перпендикулярна плоскости сканирования объекта (5), при этом блок пьезосканера (2) включает первый привод (8), обеспечивающий его перемещение с пьезосканером (3), держателем объекта (4) и объектом (5) вдоль третьей координаты Z, на основании (1) установлен также блок зонда (10) с держателем зонда (11), в котором закреплен зонд (12), имеющий возможность взаимодействия с измеряемой поверхностью (6) объекта (5), при этом блок зонда (10) включает второй привод (14), обеспечивающий перемещения держателя зонда (11) с зондом (12) вдоль первой координаты X, и включает третий привод (15), обеспечивающий перемещения держателя зонда (11) с зондом (12) вдоль второй координаты Y, на основании (1) установлен также блок пуансона (20) с пуансоном (21), имеющим режущую кромку (22), при этом блок пуансона (20) включает четвертый привод (25), обеспечивающий его перемещение вдоль первой координаты X, и пятый привод (26), обеспечивающий его перемещение вдоль второй координате Y, а режущая кромка (22) расположена вдоль второй координаты Y и имеет возможность взаимодействия с объектом (4), на основании (1) установлен также оптический блок (30), оптически сопряженный с держателем объекта (4), с измеряемой поверхностью (6) объекта (5), и имеющий оптическую ось O-O1, расположенную вдоль первой координаты X, при этом блок зонда (10) расположен между держателем объекта (4) с объектом (5) и оптическим блоком (30), отличающийся тем, что оптический блок (30) выполнен в виде модуля оптического анализа (30), включающего объектив (31) и анализатор (32), оптически сопряженные друг с другом, в сканирующий зондовый нанотомограф с модулем оптического анализа введен шестой привод (37), установленный на основании (1), на котором закреплен модуль оптического анализа (30), при этом шестой привод (37) обеспечивает перемещение модуля оптического анализа (30) вдоль третьей координаты Z с возможностью изменения угла относительно оптической оси O-O1.
2. Устройство по п. 1, отличающееся тем, что шестой привод (37) имеет возможность перемещения модуля оптического анализа (30) вдоль третьей координаты Z и изменения угла относительно оптической оси O-O1 синхронно с перемещением пьезосканера (3) с держателем объекта (4) и объектом (5) первым приводом (8) вдоль третьей координаты Z.
3. Устройство по п. 1, отличающееся тем, что в него введен котировочный модуль по первой координате X (40), обеспечивающий также возможность изменения угла относительно оптической оси O-O1 и закрепленный на шестом приводе (37), при этом модуль оптического анализа (30) закреплен на юстировочном модуле по первой координате X (40).
4. Устройство по п. 3, отличающееся тем, что котировочный модуль по первой координате X (40) выполнен в виде третьего фланца (70), сопряженного с четвертым фланцем (75) посредством первого эксцентрика (80) и второго эксцентрика (81), установленных на третьем фланце (70), при этом в него введены первый установочный винт (86) и два вторых установочных винта (87), обеспечивающих возможность изменения угла четвертого фланца (75) относительно оптической оси O-O1.
5. Устройство по п. 1, отличающееся тем, что анализатор (32) выполнен в виде ПЗС-матрицы.
6. Устройство по п. 1, отличающееся тем, что анализатор (32) выполнен в виде спектрометра.
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2008 |
|
RU2389032C2 |
| US 2007022804 A1, 01.02.2007 | |||
| WO 2012110602 A1, 23.08.2012 | |||
| JP 2010058222 A, 18.03.2010. | |||

