УРОВЕНЬ ТЕХНИКИ
Область техники
В основном настоящее изобретение относится к беспроводным системам связи. А точнее, варианты осуществления, раскрытые здесь, касаются обеспечения улучшенного измерения времени прихода сигнала и более точного определения местоположения в системах беспроводной связи.
Уровень техники
Системы беспроводной связи широко используются для обеспечения различных типов связи (таких как голос и данные) с множеством пользователей. Такие системы могут быть основаны на множественном доступе с кодовым разделением каналов (CDMA), множественном доступе с временным разделением каналов (TDMA), множественном доступе с частотным разделением каналов (FDMA) или любом другом способе множественного доступа. Система беспроводной связи может быть спроектирована для реализации одного или более стандартов, таких как IS-95, cdma2000, IS-856, W-CDMA, TD-SCDMA и других стандартов.
Услуги обнаружения присутствия и услуги на основе информации о местоположении, в течение долгого времени были популярны в беспроводных системах связи. В дополнение к поддержке аварийно-спасательных служб (например, запросы E911), операторы беспроводной связи стремятся обеспечить широкий диапазон новых приложений, нацеленных на постоянных клиентов и корпоративных пользователей, такие как определение местоположения ребенка, поэтапная навигация, справочная служба, голосовой помощник, дорожная помощь и многие другие. Следовательно, задача состоит в обеспечении точного и достоверного определения местоположения, чтобы пользоваться этими приложениями.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 поясняет вариант осуществления системы беспроводной связи;
фиг.2 поясняет вариант осуществления сегмента структуры прямого канала связи в системе типа IS-856;
фиг.3A-3B поясняют варианты осуществления сегмента структуры прямого канала связи для передачи опорного сигнала;
фиг.4A поясняет вариант осуществления структуры прямого канала связи в системе типа IS-95;
фиг.4B поясняют варианты осуществления структуры прямого канала связи для передачи опорного сигнала;
фиг.5 поясняет блок-схему процесса, который может использоваться для реализации некоторых раскрытых вариантов осуществления;
фиг.6 поясняет блок-схему процесса, который может использоваться для реализации некоторых раскрытых вариантов осуществления;
фиг.7 поясняет блок-схему процесса, который может использоваться для реализации некоторых раскрытых вариантов осуществления;
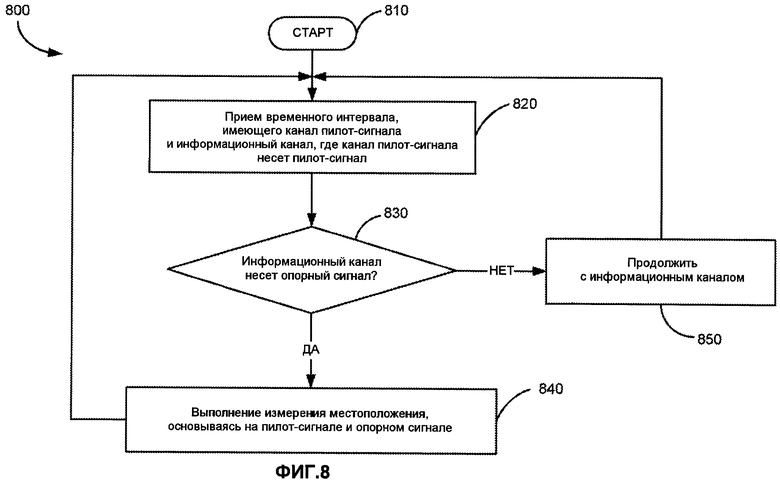
фиг.8 поясняет блок-схему процесса, который может использоваться для реализации некоторых раскрытых вариантов осуществления;
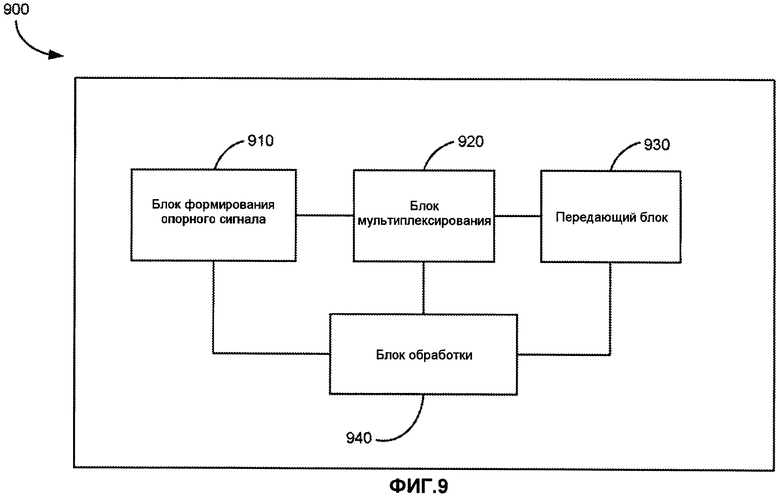
фиг.9 поясняет блок-схему устройства, в котором некоторые раскрытые варианты осуществления могут быть реализованы; и
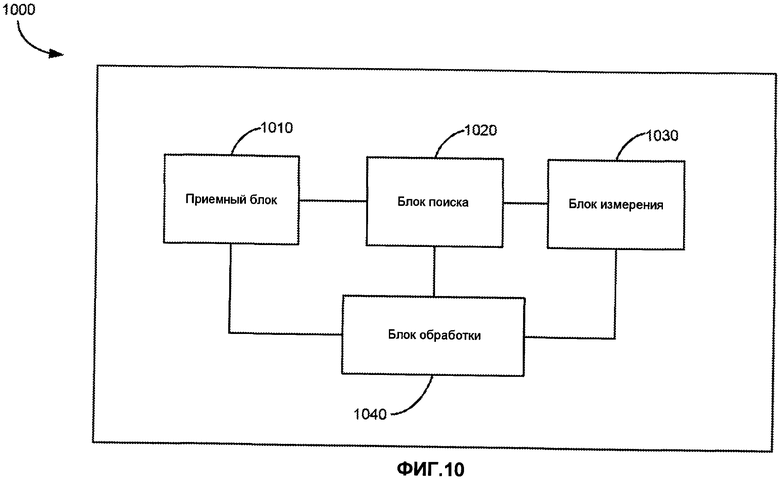
фиг.10 поясняет блок-схему устройства, в котором некоторые раскрытых варианты осуществления могут быть реализованы.
ПОДРОБНОЕ ОПИСАНИЕ
Варианты осуществления, раскрытые здесь, касаются способов и систем обеспечения улучшенного определения местоположения в системах беспроводной связи.
Точка доступа (AP), раскрытая здесь, может содержать и/или осуществлять функции базовой приемопередающей станции (BTS), приемопередатчика сети доступа (ANT), приемопередатчика модемного пула (MPT), или Node B (например, в системе типа W- CDMA), и т.д. Сота может находиться в зоне покрытия, обслуживаемой точкой доступа (AP). Сота может даже содержать один или более секторов. Для простоты и ясности, термин "сектор" может быть использован здесь по отношению к соте, или сегменту соты, обслуживаемой точкой доступа (AP). В дополнение, контроллер сети доступа (ANC) относится к части системы связи, конфигурированной, чтобы обеспечить интерфейс с основной сетью (например, сетью передачи данных) и распределить пакеты данных между терминалами доступа (AT) и основной сетью, обеспечивая разнообразный радиодоступ и связь основных функции (такие как мягкая передача обслуживания), управление радиопередатчиками и радиоприемниками, и так далее. Контроллер сети доступа (ANC) может содержать и/или выполнять функции контроллера базовой станции (BSC), как предусмотрено во 2-м, 3-м или 4-м поколении беспроводных систем связи. Контроллер сети доступа (ANC) и одна или более точек доступа (AP) могут составлять часть сети доступа (AN).
Терминал доступа (AT), описанный здесь, может относиться к различным типам устройств, в том числе (но не ограничиваясь перечисленным) к беспроводному телефону, сотовому телефону, ноутбуку, беспроводному мультимедиаустройству, плате беспроводной связи для персонального компьютера (PC), персональному цифровому секретарю (PDA), внешнему или внутреннему модему и т.д. Терминалом доступа (AT) могут быть любые устройства, которые соединяются через беспроводной канал и/или через проводной канал (например, посредством волоконно-оптических или коаксиальных кабелей). Терминал доступа (AT) может называться по-разному, например модуль доступа, точка доступа, абонентский модуль, мобильная станция, мобильное устройство, мобильный модуль, мобильный телефон, мобильный, удаленная станция, удаленный терминал, удаленный модуль, пользовательское устройство, пользовательское оборудование, карманное устройство и т.д. Другие терминалы доступа (AT) могут быть объединены в систему. Терминалы доступа (AT) могут быть подвижными или стационарными и могут быть рассредоточены всюду по системе связи. Терминал доступа (AT) может быть соединен с одной или более точками доступа (AP) на прямом канале и/или обратном канале, в заданный момент. Прямой канал (или нисходящий канал) относится к передаче от точки доступа (AP) к терминалу доступа (AT). Обратный канал (или восходящий канал связи) относится к передаче от терминала доступа (AT) к точке доступа (AP).
Определение местоположения человека или беспроводного объекта может быть достигнуто разными способами. Измерение времени прихода сигнала (TOA), то есть времени, которое сигнал затрачивает на перемещение, в качестве косвенного способа вычисления расстояния, обычно связано с целым рядом сетевых способов. Например, в некоторых беспроводных сетях услуга обнаружения местоположения требует измерения TOA пилот-сигнала (например, самый короткий путь пилот-сигнала).
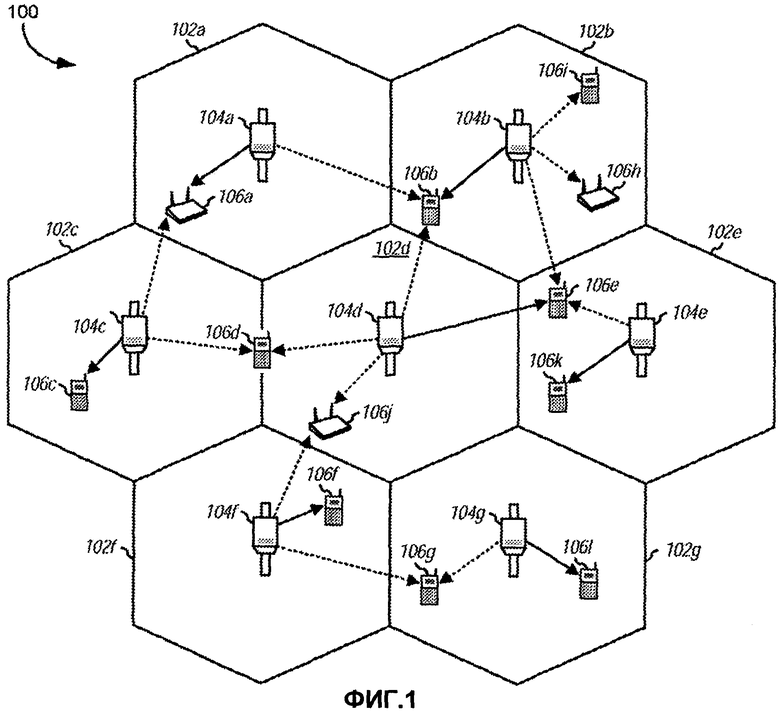
Фиг.1 поясняет систему беспроводной связи 100, сконфигурированную для поддержки множества пользователей, в которой различные раскрытия вариантов осуществления и аспектов могут быть реализованы, как описано ниже. В качестве примера рассмотрим систему 100 обеспечивающую связь нескольких сот 102, включая соты 102a-102g, с каждой сотой, обслуживаемой соответствующей точкой доступа (AP) 104 (такие как точки доступа (AP) 104a-104g). Каждая сота может быть в дальнейшем разделена на один или более секторов. Различные терминалы доступа (AT) 106, включая терминалы доступа (AT) 106a-106k, рассредоточены всюду по системе. Любой терминал доступа (AT) 106 может соединяться с одной или более точками доступа (AP) 104 на прямом канале связи и/или обратном канале связи, в заданный момент, в зависимости от того, например, является ли терминал доступа (AT) активным или он находится в режиме мягкой передачи обслуживания. На фиг.1 сплошная линия со стрелкой может указывать на информацию (например, данные) передаваемую от точки доступа (АР) к терминалу доступа (AT). Пунктирная линия со стрелкой может указывать, что терминал доступа (AT) принимает пилот-сигнал и другие сигналы сигнализации/опорные сигналы, но не передает данные от точки доступа (АР), как описано ниже. Для ясности и простоты, обратный канал связи явно не показан на фиг.1.
В системе(HRPD) высокоскоростной пакетной передачи данных (например, как определено в "cdma2000 High Rate Packet Data Air Interface Specification" 3GPP2 C.S0024-A, Версия 2, июль 2005 года, названный "lxEV-DO (или как здесь "IS-856")), например, передача по прямому каналу разделена на несколько кадров; каждый кадр разделен на временные интервалы (например, 16 интервалов, каждый продолжительностью 1,667 мс); и каждый интервал включает в себя множество каналов с временным уплотнением.
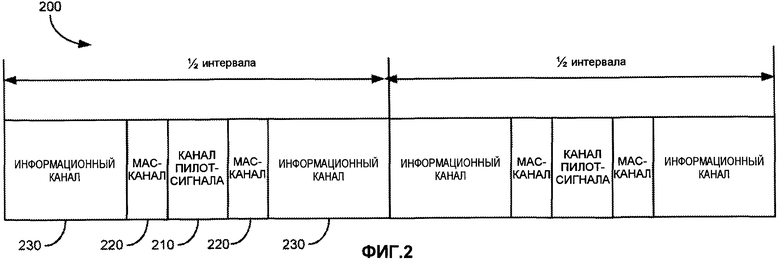
Посредством примера на фиг.2 показан вариант осуществления структуры интервала прямого канала 200, такой как используется в системе типа IxEV-DO. Временной интервал 200 делится на две половины, причем каждая половина имеет следующие назначения каналов: канал 210 пилот-сигнала, прямой канал подуровня управления доступом к среде (MAC) 22 0, и прямой информационный канал (или канал управления) 230. Канал 210 пилот-сигнала переносит пилот-сигнал (также обычно называемый пилотом), используемый терминалами доступа (AT) (такими как AT 106 на фиг.1) для вхождения в синхронизм, восстановления фазы, выделения тактового сигнала, сложения радиосигналов, а также оценки условий прямого канала (например, путем измерения соотношения «сигнал к шуму плюс помеха» (SINR)). МАС-канал 220 устанавливает процедуры, использующиеся для приема и передачи по физическому уровню (который формирует структуру канала, частоту, выходную мощность, модуляцию, технические требования к кодированию для прямого и обратного каналов). Информационный канал 230 может содержать информацию или данные (например, посредством пакетов физического уровня), например, индивидуальные данные, предназначенные для определенного терминала доступа (AT) (или пользователя), или широковещательные/многоадресные данные для группы пользователей (например, как определено в "cdma2000 High Rate Packet Data Air Interface Specification,” 3GPP2 CS0054-0, Версия 2.0, июль 2005 года, названный здесь "технические требования BCMCS"). Информационный канал 230 может также использоваться для сообщений управления. Далее, канал 210 пилот-сигнала, МАС-канал 220 и информационный канал 230 мультиплексируются с временным уплотнением в пределах временного интервала 200. Когда нет никакой информации на информационном канале 230, неактивный интервал может передавать содержимое канала пилот-сигнала 210 и МАС-канала 220. Передача неактивных интервалов обеспечивает уменьшение помех с другими сотами на прямом канале.
Как поясняется на фиг.2, канал 210 пилот-сигнала передается в дискретных пакетах (в противоположность тому, чтобы быть непрерывным по времени), следовательно, имеет ограниченную мощность. В некоторых системах, например, канал 210 пилот-сигнала может содержать 96 элементов определенного цифрового шаблона (например, все нули), канал MAC 220 может содержать 64 элемента, и каждая половина интервала может содержать 1024 элемента. Таким образом, только малая величина (например, 96/1024) доступной мощности прямого канала распределена на канал пилот-сигнала в таких системах. В результате, измерение TOA, основанное на таком канале пилот-сигнала, может быть восприимчиво к ошибкам (особенно, например, когда прямой канал связи низкокачественный), следовательно, ставит под угрозу точность и надежность определения местоположения. Поэтому существует потребность в сильном и чистом сигнале, чтобы обеспечить определение местоположения.
Варианты осуществления, раскрытые здесь, касаются способов и систем, обеспечивающих улучшенное измерение TOA и расширенное определение местоположения в системах беспроводной связи.
В варианте осуществления точка доступа (AP) может заменить передачу нормальной информации (например, данных), "известной" передачей (названной здесь "опорная передача") в заданное время, известное терминалам доступа (AT) в секторах, обслуживаемых точкой доступа (AP). Терминалы доступа (AT) могут использовать принятую опорную передачу, чтобы помочь, или облегчить определение местоположения (например, TOA и/или другие измерения определяющие местоположение). Точка доступа (AP) может также передавать опорную передачу по требованию, например, в ответ на запрос от терминала доступа (AT) (которому может потребоваться услуга определения местоположения).
В некоторых вариантах осуществления опорная передача может включать в себя интервал времени, имеющий пилот-сигнал и опорный сигнал в формате с временным уплотнением. В других вариантах осуществления опорная передача может включать в себя интервал времени, имеющий пилот-сигнал и опорную передачу в формате с кодовым уплотнением. Опорный сигнал может быть подобным или по существу идентичным пилот-сигналу, таким образом, чтобы почти весь интервал времени был заполнен пилот-сигналом, таким образом обеспечивая сильную связь для TOA и других измерений, определяющих местоположение. Опорный сигнал может также отличаться от пилот-сигнала, например, может конфигурироваться, чтобы помочь пилот-сигналу в определении местоположения. Следующее описание предусматривает другие варианты осуществления и примеры.
Термин “опорный сигнал”, раскрытый здесь, может содержать любой немодулированный сигнал (например, не несущий ни информации, ни данных) и известен приемному терминалу доступа (AT). Например, опорный сигнал может содержать цифровой шаблон (например, последовательность символов), которая заранее "известна" приемному терминалу доступа (AT), поэтому терминал доступа не должен декодировать опорный сигнал. Опорный сигнал может нести уникальный секторный идентификатор (например, сложенный с псевдослучайным (PN) кодом с уникальным смещением, определяющим сектор). Опорный сигнал может быть передан по существу с максимальной мощностью, доступной для сектора (“или полной мощностью сектора”). В некоторых вариантах осуществления опорный сигнал может быть сигналом с расширенным спектром или другим широкополосным сигналом (например, занимая весь информационный канал). “Опорная передача”, раскрытая здесь, относится к передаче по прямому каналу, включающей в себя опорный сигнал. В дальнейшем термин "измерение местоположения" может явно относится к измерению, связанному с определением местоположения, включая (но не ограничиваясь перечисленным) TOA, разницу во времени прибытия (TDOA), угол прибытия (AOA), продвинутую трилатерацию прямого канала (AFLTX), расширенное наблюдение разницы во времени (EOTD) и другие.
Различные аспекты, особенности и варианты осуществления описаны ниже более подробно.
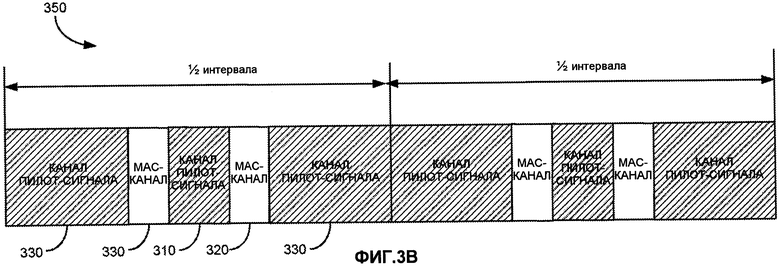
Фиг.3A поясняет вариант осуществления для опорной передачи, включающей в себя интервал времени 300, который может использоваться для осуществления некоторых раскрытых вариантов осуществления. Интервал времени 300 показан в двух полуинтервалах, каждый имеет канал 310 пилот-сигнала, МАС-канал 320 и информационный канал 330 в формате мультиплексирования с временным разделением. Канал 310 пилот-сигнала переносит пилот-сигнал. Канал 310 пилот-сигнала и МАС-канал 320 могут, например, быть такими же, как описано выше в отношении варианта осуществления фиг.2. Информационный канал 330 переносит опорный сигнал вместо данных.
В некоторых вариантах осуществления опорный сигнал может быть подобным или по существу идентичным пилот-сигналу, как интервал времени 350, показанный на фиг.3B. В результате почти весь интервал 350 заполнен пилот-сигналом, как графически поясняется штрихованной областью на чертеже, и полная мощность всего сектора может быть по большей части распределена на передачу пилот-сигнала в этот временной период. Этот сильный пилот-сигнал позволяет принимающему терминалу доступа (AT) выполнять более точное и достоверное измерение TOA и другие измерения местоположения. Определение времени и синхронизация для такого “пилотного слота” могут, например, быть выполнены согласно широковещательной/многоадресной структуре канала в системе типа 1xEV-DO (например, как определено в технических требованиях BCMCS). В дальнейшем реализация такого "пилотного слота" налагает минимальные изменения к существующим инфраструктурам сети и сетевым устройствам.
В других вариантах осуществления опорный сигнал может отличаться от пилот-сигнала. Определение времени и синхронизация для опорной передачи может, например, происходить согласно широковещательной/многоадресной структуре канала в системе типа 1xEV-DO, (например, как определено в технических требованиях BCMCS). В одном из вариантов осуществления, например, пилот-сигнал может содержать последовательность символов, имеющую все нули (0), тогда как опорный сигнал может содержать последовательность символов, имеющую все единицы (1). В другом варианте осуществления пилот-сигнал может содержать пилотные символы, используемые в системе типа 1xEV-DO, тогда как опорный сигнал может содержать пилотные символы, используемые в системе типа IS-95. В еще одном варианте осуществления пилот-сигнал может содержать специфическую последовательность символов, в то время как опорный сигнал может содержать обратную последовательность символов. В другом варианте осуществления может быть передан известный пакет данных, как опорный сигнал, например, используя широковещательную/многоадресную структуру канала и синхронизацию, как в системе типа 1xEV-DO (например, как определено в технических требованиях BCMCS). Принимающий терминал доступа (AT) может использовать этот опорный сигнал для поиска (более слабого) пилот-сигнала, оценки TOA (и/или выполнения других измерений местоположения), и сообщать назад о результатах измерения.
В одном варианте осуществления опорная передача может быть выполнена точкой доступа (AP) согласно заданному графику (например, на регулярной или периодической основе), чтобы в известное время приемные терминалы доступа (AT) в соответствующих секторах смогли бы подготовиться к выполнению измерения TOA и/или других измерений местоположения и сообщить назад о результатах измерения.
В одном варианте осуществления точка доступа (AP) может производить опорную передачу по требованию, например, после приема запроса от терминала доступа (AT) (которому требуется услуга определения местоположения).
В еще одном варианте осуществления точка доступа (AP) может использовать неактивные интервалы для опорной передачи (например, регистрируя неактивный интервал в основном с пилот-сигналом так, как описано выше относительно варианта осуществления фиг.3B), чтобы сделать, таким образом, эффективным использование сетевых ресурсов. Например, сигнализация, связанная с этим временным интервалом, может указать приемному терминалу доступа (AT) на опорный сигнал, переносимый информационным каналом так, чтобы терминал доступа (AT) мог соответственно выполнить измерение TOA и/или другие измерения местоположения.
Фиг.3A-3B обеспечивают некоторыми примерами передачи опорного сигнала вместе с пилот-сигналом в формате мультиплексирования с временным разделением. В других системах (например, как определено в “Стандарте Физического уровня cdma2000 Системы Спектра,” 3GPP2 C.S0002-D, Версия 2.0, сентябрь 2005 года, названном здесь “CDMA2000 1x”, или как определено в "Mobile Station-Base Station Compatibility Standard for Wideband Spread Spectrum Cellular Systems," ANSI/TIA/EIA-95-B-99, названном здесь "IS-95"), опорный сигнал может быть передан вместе с пилот-сигналом в формате мультиплексирования с кодовым разделением так, как описано ниже.
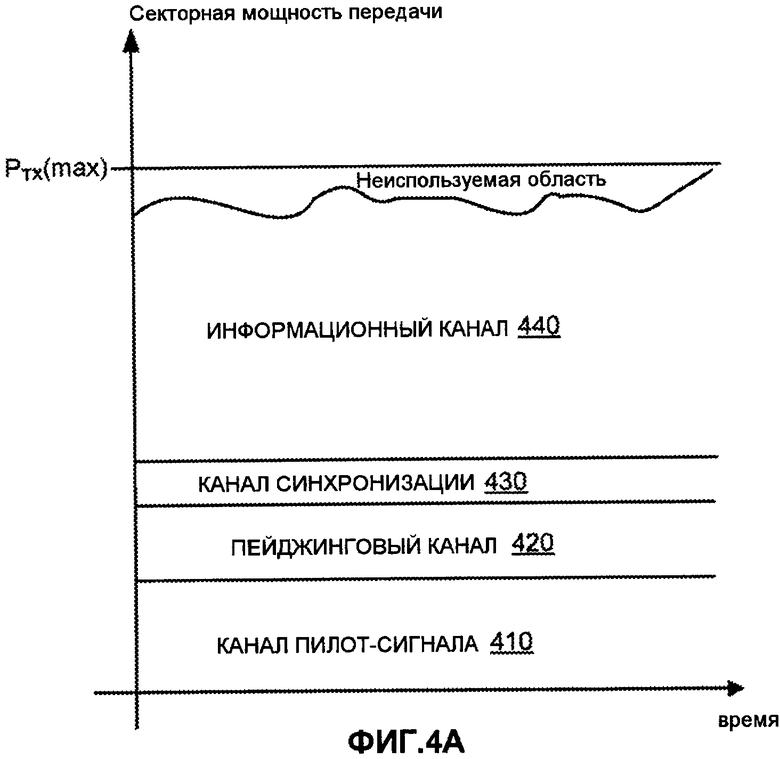
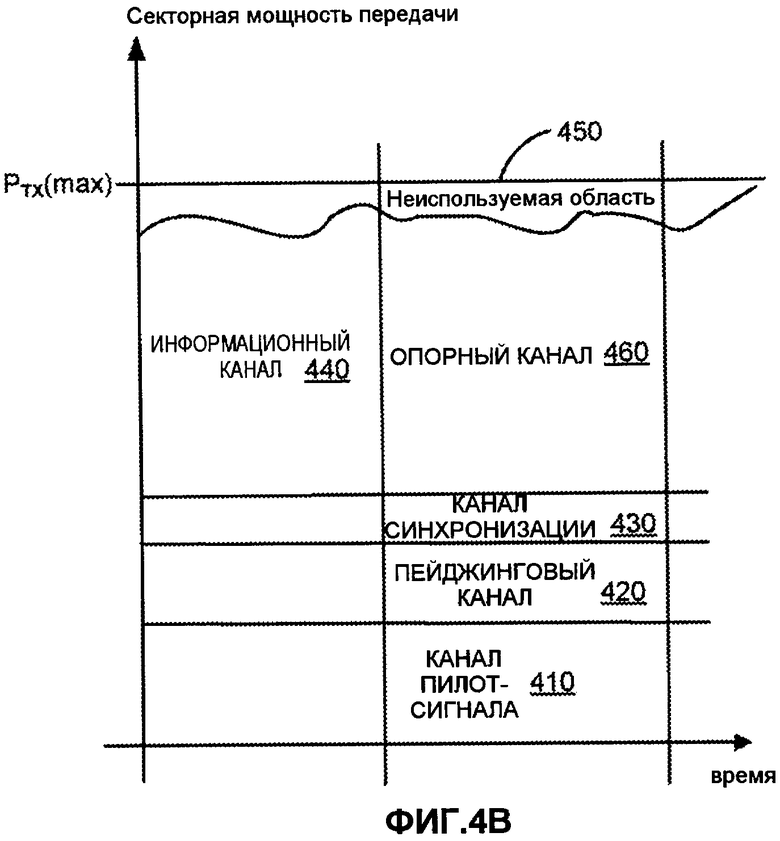
Фиг.4A поясняет вариант осуществления структуры прямого канала связи в виде графика использования мощности сектора во времени, такой как в системах типа IS-95, или CDMA2000 1x. Прямые каналы связи содержат канал 410 пилот-сигнала, канал 420 синхронизации, пейджинговый канал 430 и информационные каналы 440, передаваемые в формате мультиплексирования с кодовым разделением, каждый с определенной частью полной секторной мощности. Например, на канал 410 пилот-сигнала можно распределить приблизительно 15-20% максимальной секторной мощности, обозначаемой как PTX(max). Чтобы усилить пилот-сигнал (например, для целей определения местоположения), некоторая или вся мощность, распределенная на информационные каналы 440, может использоваться, чтобы передать опорный сигнал (вместо информационной передачи) в определенном промежутке времени, таком как поясняется в фиг.4B ниже.
Для иллюстрации и ясности фиг.4B изображает вариант осуществления, в котором мощность, распределенная на информационные каналы 440, может быть по существу распределена таким образом, чтобы передать опорный сигнал 460 в интервале времени 450. Например, такое может произойти в ситуациях, когда точка доступа (AP) посылает опорную передачу в соответствующие терминалы доступа (AT) согласно заданному графику (например, на регулярной или периодической основе), чтобы в известные промежутки времени терминалы доступа (AT) могли быть подготовлены выполнить измерение местоположения и сообщить назад о результатах измерения. В некоторых вариантах осуществления опорный сигнал может быть схожим или по сути идентичным с пилот-сигналом; в результате почти весь интервал времени 450 может быть заполнен пилот-сигналом, таким образом, обеспечив сильный сигнал для измерения местоположения. В других вариантах осуществления опорный сигнал может также отличаться от пилот-сигнала, такого, как описано выше.
В альтернативных вариантах осуществления часть мощности, распределенной на информационные каналы 440, может использоваться, чтобы передать опорный сигнал 460 в интервале времени 450. Например, такое может произойти в ситуациях, когда точка доступа (AP) выполняет опорную передачу по требованию, например, в ответ на запрос (запросы) от одного или более терминалов доступа (AT) в соответствующих секторах (которым может потребоваться услуга определения местоположения).
В дополнение к замене информационной передачи опорной передачей согласно заданному графику или по требованию (такому, как описано выше), часть канала управления (например, преамбула), или другие существующие (или известные) сигналы, могут использоваться, чтобы помочь пилот-сигналу в определении местоположения, например, в некоторых системах канал управления может быть передан на постоянной или периодической основе. Преамбула канала управления может быть известна приемным терминалам доступа (AT) (например, после начальной установки) и поэтому используется, чтобы помочь пилот-сигналу в определении местоположения (такой способ, описан выше по отношению к опорному сигналу).
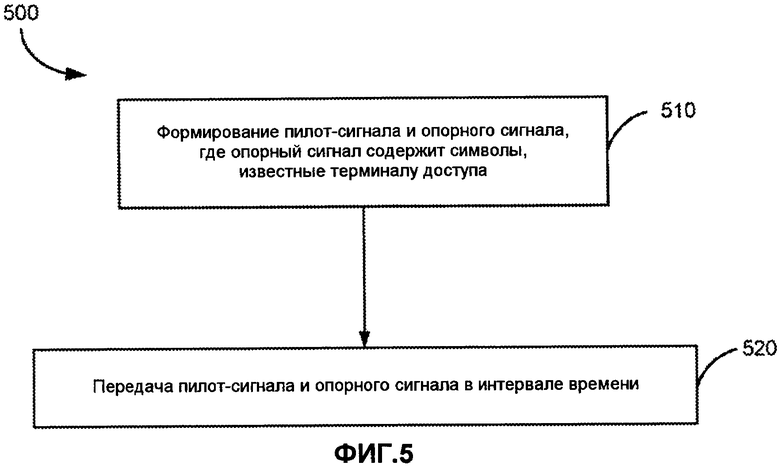
Фиг.5 поясняет блок-схему процесса 500, который может использоваться, чтобы осуществить некоторые раскрытия вариантов осуществления (такие, как описаны выше). Этап 510 формирует пилот-сигнал и опорный сигнал, где опорный сигнал включает в себя последовательность символов, известных терминалу доступа. Этап 520 передает пилот-сигнал и опорный сигнал в интервале времени.
В процессе 500, пилот-сигнал и опорный сигнал могут быть переданы в формате мультиплексирования с временным разделением или в формате мультиплексирования с кодовым разделением, таких, как описано выше. В некоторых вариантах осуществления опорный сигнал может быть таким же или по существу идентичен пилот-сигналу. В других вариантах осуществления опорный сигнал может отличаться от пилот-сигнала, например быть сконфигурированным, чтобы помочь пилот-сигналу в определении местоположения (например, измерения TOA и других измерений местоположения), так, как описано выше. Далее, в системе беспроводной связи с несколькими несущими интервал времени может быть передан на подмножестве (например, на некоторых, всех или на любой комбинации) несущих.
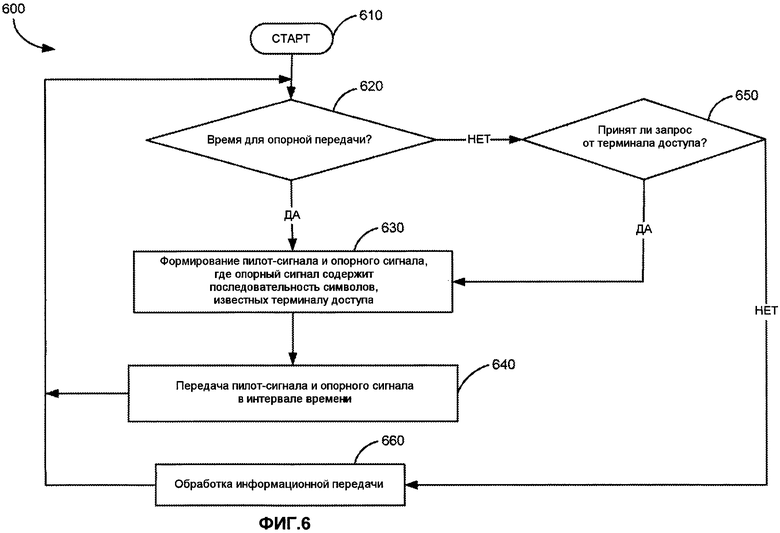
Фиг.6 поясняет блок-схему процесса 600, который может использоваться для осуществления некоторых раскрытий вариантов осуществления (таких, как описанные выше). Процесс 600 начинается этапом 610. Этап 620 определяет (например, на основании заданного графика), является ли оно временем для опорной передачи к приемным терминалам доступа (AT) в секторах, обслуживаемых точкой доступа (AP). Если результат этапа 620 - “ДА”, тогда следует этап 630, на котором формируются пилот-сигнал и опорный сигнал. Этап 640 передает пилот-сигнал и опорный сигнал в интервале времени (например, в формате мультиплексирования с временным разделением или в формате мультиплексирования с кодовым разделением, таких, как описано выше). После этого, процесс 600 возвращается к этапу 620.
В процессе 600, если результат этапа 620 - “НЕТ”, тогда следует этап 650, на котором определяется, есть ли запрос об услуге на определение местоположения от терминала доступа (AT). Если результат этапа 650 - “ДА”, тогда процесс 600 возвращается к этапу 630. Если результат этапа 650 - “НЕТ”, тогда следует этап 660 и производится передача информации (например, данных). Впоследствии процесс 600 возвращается к этапу 620.
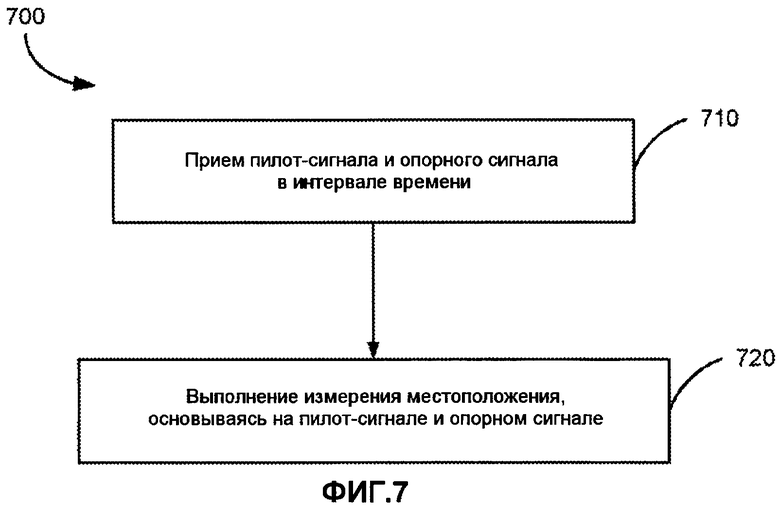
Фиг.7 поясняет блок-схему процесса 700, которая может использоваться для осуществления некоторых раскрытий вариантов осуществления. Этап 710 принимает пилот-сигнал и опорный сигнал в интервале времени (например, в формате мультиплексирования с временным разделением или в формате мультиплексирования с кодовым разделением, таких, как описано выше). Этап 730 выполняет измерение местоположения, основанное на пилот-сигнале и опорном сигнале.
Процесс 700 может дополнительно включать в себя поиск пилот-сигнала. В некоторых случаях опорный сигнал может быть подобным или по существу идентичным пилот-сигналу, эффективно снабжающему сильный пилот-сигнал для измерений местоположения. В отдельных случаях приемный терминал доступа (AT) может использовать опорный сигнал, чтобы искать (более слабый) пилот-сигнал, оценивать TOA (и/или выполнять другие измерения местоположения), и сообщать назад о полученных результатах.
Фиг.8 поясняет блок-схему процесса 800, которая может использоваться, чтобы осуществлять некоторые раскрытия вариантов осуществления (такие, как описано выше). Процесс 800 начинается этапом 810. Этап 820 принимает интервал времени, имеющий канал пилот-сигнала и опорный канал (например, в формате мультиплексирования с временным разделением, таким, как описано выше), канал пилот-сигнала несет пилот-сигнал. Этап 830 определяет, несет ли информационный канал опорный сигнал. Если результат этапа 830 - “ДА”, то за этим следует этап 840, выполняющий измерение местоположения (например, TOA), основанное на пилот-сигнале и опорном сигнале. Процесс 800 впоследствии возвращается к этапу 820. Если результат этапа 830 - "НЕТ", то за этим следует этап 850, оперирующий с информационным каналом (например, декодирование пакетов данных, передаваемых информационным каналом). Процесс 800 впоследствии возвращается к этапу 820.
Фиг.9 показывает блок-схему устройства 900, которая может использоваться, чтобы осуществить некоторые раскрытия вариантов осуществления (таких как описано выше). В качестве примера устройство 900 может содержать блок опорного генератора (или модуль) 910, сконфигурированный, чтобы формировать пилот-сигнал и опорный сигнал, причем опорный сигнал включает в себя последовательность известных символов (например, к одному или более приемным терминалам доступа (AT)); и передающий блок 930, конфигурированный, чтобы передавать пилот-сигнал и опорный сигнал в интервале времени. В системе с множеством несущих передающий блок 930 может быть дополнительно сконфигурирован, чтобы передавать интервал времени на подмножестве несущих.
Устройство 900 может также включать в себя коммутирующее устройство 920, конфигурированное, чтобы мультиплексировать пилот-сигнал и опорный сигнал в интервал времени (например, в формате мультиплексирования с временным разделением или в формате мультиплексирования с кодовым разделением, такими как описано выше). Устройство 900 может дополнительно включать в себя процессор (или контроллер) 940, сконфигурированный, чтобы управлять и/или координировать операции различных блоков.
Устройство 900 может быть реализовано в точке доступа (AP) (например, точка доступа 106 на фиг.1), или других элементах инфраструктуры сети.
Фиг.10 поясняет блок-схему устройства 1000, которое может также использоваться при осуществлении некоторых раскрытий варианта осуществления (такого, как описано выше). В качестве примера устройство 1000 может включать приемный блок 1010, сконфигурированный, чтобы принять пилот-сигнал и опорный сигнал в интервале времени (например, в формате мультиплексирования с временным разделением или в формате мультиплексирования с кодовым разделением, такими, как описано выше); и блок измерения 1030, сконфигурированный, чтобы выполнить измерение местоположения (например, TOA), основанное на пилот-сигнале и опорном сигнале. Устройство 1000 может дополнительно включать в себя блок поиска 1020, сконфигурированный, чтобы искать пилот-сигнал. Устройство 1000 может также включать в себя процессор (или контроллер) 1040, сконфигурированный, чтобы управлять и/или координировать операции различных модулей.
Устройство 1000 может быть реализовано в приемном терминале доступа (AT) или других устройствах связи.
Варианты осуществления, раскрытые здесь (такие, как описано выше), предусматривают различные варианты осуществления для того, чтобы улучшить определение местоположения в беспроводных системах связи. Также существуют другие варианты осуществления и реализации.
Варианты осуществления, раскрытые здесь, могут быть применены к системе беспроводной связи с множеством несущих. Например, опорную передачу можно передавать на некоторых, всех или на любой комбинации несущих.
Различные блоки/модули на фиг.9-10 и других вариантах осуществления могут быть реализованы аппаратно, программно, на встроенном программном обеспечении или посредством комбинации перечисленного. В аппаратной реализации различные модули могут быть реализованы в пределах одной или более специализированных интегральных схем (ASIC), цифровых сигнальных процессорах (DSP), цифровых устройствах обработки сигналов (DSPD), программируемых логических интегральных микросхемах (FPGA), процессорах, микропроцессорах, контроллерах, микроконтроллерах, программируемых логических устройствах (PLD), других электронных модулях или любой их комбинацией. В программной реализации различные блоки могут быть реализованы в модулях (например, процедурах, функциях и так далее), которые выполняют функции, описанные здесь. Программные коды могут быть сохранены в блоке памяти и выполнены процессором (или процессорным модулем). Блок памяти может быть реализован в пределах процессора или внешне по отношению к процессору, тогда как он может быть соединен с процессором через различные средства, известные в уровне техники.
Специалисты в данной области техники поняли бы, что информация и сигналы могут быть представлены, используя любое множество различных технологий и методик. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементы, на которые можно сослаться всюду по вышеупомянутому описанию, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или волнами, оптическими полями или волнами, или любой их комбинацией.
Специалисты в данной области техники дополнительно оценили бы, что различные представленные логические блоки, модули, схемы и этапы алгоритма, описанные в связи с раскрытыми вариантами осуществления, могут быть осуществлены как в электронном оборудование, так и программным обеспечением или их комбинацией. Чтобы ясно пояснить эту взаимосвязь оборудования и программного обеспечения, различные показанные узлы, блоки, модули, схемы и этапы были описаны выше в общих терминах их функциональных возможностей. Реализованы ли такие функциональные возможности аппаратно или программно, зависит от конкретного применения и конструктивных ограничений, наложенных на всю систему. Квалифицированные специалисты могут осуществить описанные функциональные возможности различными способами для каждого конкретного приложения, но такие решения реализации не должны быть интерпретированы как вызывающие выход за рамки настоящего изобретения.
Различные показанные логические блоки, модули и схемы, описанные в связи с вариантами осуществления, раскрытыми здесь, могут быть осуществлены или выполнены в универсальном процессоре, цифровом сигнальном процессоре (DSP), специализированной интегральной схеме (ASIC), программируемой логической интегральной схеме (FPGA) или другом программируемом логическом устройстве, дискретном логическом вентиле или транзисторной логической схеме, дискретных аппаратных компонентах или любой их комбинации, которые будут выполнять функции, описанные здесь. Универсальный процессор может быть микропроцессором, а также процессор может быть любым общеизвестным процессором, контроллером, микроконтроллером или конечным автоматом. Процессор также может быть реализован как комбинация ЭВМ, например комбинация вычислительного устройства и микропроцессора, множества микропроцессоров, одного или более микропроцессоров вместе с ядром вычислительного устройства или любой другой подобной конфигурации.
Этапы способа или алгоритма, описанного в связи с вариантами осуществления, раскрытыми здесь, могут быть воплощены прямо в аппаратных средствах, в программном модуле, выполняемом процессором, или в их комбинации. Программный модуль может постоянно находиться в оперативной памяти (RAM), флэш-памяти, постоянном запоминающем устройстве (ROM), перепрограммируемой памяти (EPROM), электронно-перепрограммируемой постоянной памяти (EEPROM), жестком диске, съемном диске, CD-ROMе, или любой другой форме носителя данных, известном в уровне техники. Примерный носитель данных соединен с процессором таким образом, что процессор может считывать информацию и записывать информацию на носитель данных. В другом варианте носитель данных может являться неотъемлемой частью процессора. Процессор и носитель данных могут постоянно находиться в специализированных интегральных схемах (ASIC). Специализированные интегральные схемы (ASIC) могут постоянно находиться в приемном терминале доступа (AT). В другом варианте процессор и носитель данных могут постоянно находиться как дискретные компоненты в приемном терминале доступа (AT).
Предшествующее описание раскрытых вариантов осуществления предусматривает возможность любому специалисту в данной области техники сделать или использовать текущее изобретение. Следует понимать, что различные изменения к этим вариантам осуществления очевидны для специалистов в данной области техники, и общие правила, определенные здесь, могут быть применены к другим вариантам осуществления, не отступая от духа изобретения и не выходя за его рамки. Таким образом, настоящее изобретение не ограниченно вариантами осуществления, которые показаны здесь, но должно получить самые широкие возможности, совместимые с принципами и новыми признаками, раскрытыми здесь.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕСПРОВОДНОЙ СВЯЗИ CDMA | 2007 |
|
RU2432690C2 |
| УНИФИЦИРОВАННАЯ СТРУКТУРА КАДРА | 2015 |
|
RU2681084C2 |
| СПОСОБЫ И УСТРОЙСТВО АДРЕСАЦИИ НА ОСНОВЕ PN КОДА ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2420008C2 |
| ВЫХОД ИЗ НЕСООТВЕТСТВИЯ РЕСУРСОВ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2421939C2 |
| ВИРТУАЛЬНОЕ ПЛАНИРОВАНИЕ В НЕОДНОРОДНЫХ СЕТЯХ | 2009 |
|
RU2472288C2 |
| ИСПОЛЬЗОВАНИЕ СООБЩЕНИЙ НАЗНАЧЕНИЯ ДЛЯ ЭФФЕКТИВНОЙ ПЕРЕДАЧИ СИГНАЛОВ ПРИ ПЕРЕДАЧЕ ОБСЛУЖИВАНИЯ | 2006 |
|
RU2395933C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ В СИСТЕМЕ, ИСПОЛЬЗУЮЩЕЙ РАЗЛИЧНЫЕ ПРОТОКОЛЫ ПЕРЕДАЧИ | 2005 |
|
RU2375828C2 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ, ОБМЕНА И/ИЛИ ИСПОЛЬЗОВАНИЯ ИНФОРМАЦИИ О ПОМЕХАХ | 2007 |
|
RU2417531C2 |
| АСИММЕТРИЧНЫЙ РЕЖИМ РАБОТЫ В СИСТЕМАХ СВЯЗИ С МНОЖЕСТВОМ НЕСУЩИХ | 2006 |
|
RU2378764C2 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ БЕСПРОВОДНЫХ РЕСУРСОВ | 2007 |
|
RU2407201C2 |
Изобретение относится к беспроводной связи и, в частности, к измерению времени прихода сигнала и определению местоположения в системах беспроводной связи. Техническим результатом является обеспечение точного и достоверного определения местоположения. Указанный технический результат достигается тем, что точка доступа может заменять информационную (например, данные) передачу на "известную" передачу ("опорную передачу") в заданное время, известное терминалам доступа в соответствующих секторах. Терминалы доступа могут использовать принятую опорную передачу для выполнения измерений местоположения и отсылать назад результаты измерения. Точка доступа также может посылать опорную передачу по запросу, например, в ответ на запрос от терминала доступа, которому требуется услуга определения местоположения. 6 н. и 26 з.п. ф-лы, 12 ил.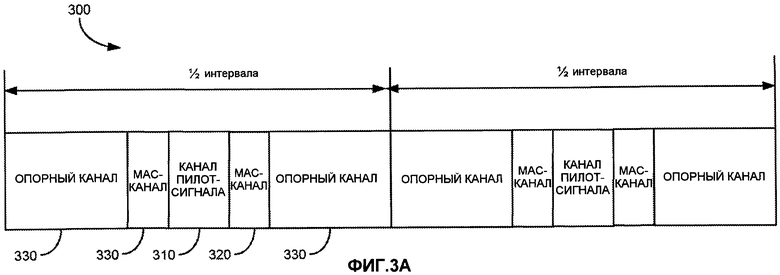
1. Способ беспроводной связи, содержащий этапы, на которых: генерируют пилот-сигнал и опорный сигнал, причем опорный сигнал содержит последовательность символов, известных терминалу доступа; и передают пилот-сигнал и опорный сигнал в интервале времени.
2. Способ по п.1, дополнительно содержащий этап мультиплексирования с временным разделением пилот-сигнала и опорного сигнала в интервал времени.
3. Способ по п.2, в котором интервал времени содержит распределение канала пилот-сигнала, мультиплексированное с разделением по времени с распределением информационного канала, причем распределение канала пилот-сигнала несет пилот-сигнал, а распределение информационного канала несет опорный сигнал.
4. Способ по п.3, в котором опорный сигнал, по существу, занимает распределение информационного канала.
5. Способ по п.2, дополнительно содержащий этап передачи опорного сигнала с максимальной мощностью.
6. Способ по п.1, дополнительно содержащий этап мультиплексирования с кодовым разделением пилот-сигнала и опорного сигнала в интервал времени.
7. Способ по п.1, в котором сигнал, имеющий символы, по существу, идентичные символам пилот-сигнала, служит в качестве опорного сигнала.
8. Способ по п.1, в котором опорный сигнал содержит идентификатор (ID) сектора.
9. Способ по п.1, в котором опорный сигнал передают в соответствии с заданным графиком.
10. Способ по п.1, в котором опорный сигнал передают в ответ на запрос от терминала доступа.
11. Способ по п.1, дополнительно содержащий этап передачи сигналов в интервале времени на подмножестве множества несущих.
12. Носитель данных для использования в устройстве для обеспечения определения местоположения в беспроводной связи, причем носитель данных содержит инструкции, предписывающие процессору осуществлять этапы, на которых: принимают пилот-сигнал и опорный сигнал в интервале времени, причем опорный сигнал содержит последовательность символов, известных получателю; и выполняют измерение местоположения, основанное на пилот-сигнале и опорном сигнале.
13. Носитель данных по п.12, в котором интервал времени содержит назначение канала пилот-сигнала, мультиплексированное с разделением по времени с назначением информационного канала, причем назначение канала пилот-сигнала несет пилот-сигнал, а назначение информационного канала несет опорный сигнал.
14. Носитель данных по п.12, в котором сигнал, имеющий символы, по существу, идентичные символам пилот-сигнала, служит в качестве опорного сигнала.
15. Носитель данных по п.12, в котором опорный сигнал содержит идентификатор сектора.
16. Устройство для обеспечения определения местоположения в беспроводной связи, содержащее: средство для генерирования пилот-сигнала и опорного сигнала, причем опорный сигнал содержит в себе последовательность символов, известных терминалу доступа; и средство для передачи пилот-сигнала и опорного сигнала в интервале времени.
17. Устройство по п.16, дополнительно содержащее средства для мультиплексирования пилот-сигнала и опорного сигнала в интервал времени в одном из форматов мультиплексирования с временным разделением или кодовым разделением.
18. Устройство по п.16, в котором интервал времени содержит назначение канала пилот-сигнала и назначение информационного канала, причем назначение канала пилот-сигнала несет пилот-сигнал, а назначение информационного канала несет опорный сигнал.
19. Устройство по п.16, в котором опорный сигнал передают в соответствии с заданным графиком.
20. Устройство по п.16, в котором опорный сигнал передают в ответ на запрос от терминала доступа.
21. Устройство по п.16, в котором средство для передачи дополнительно сконфигурировано, чтобы передавать интервал времени на подмножестве множества несущих.
22. Способ для обеспечения определения местоположения в беспроводной связи, содержащий этапы, на которых: принимают пилот-сигнал и опорный сигнал в интервале времени; причем опорный сигнал содержит последовательность символов, известных получателю; и выполняют измерение местоположения, основанное на пилот-сигнале и опорном сигнале.
23. Способ по п.22, в котором интервал времени содержит назначение канала пилот-сигнала, мультиплексированное с разделением по времени с назначением информационного канала, причем назначение канала пилот-сигнала несет пилот-сигнал, а назначение информационного канала несет опорный сигнал.
24. Способ по п.23, дополнительно содержащий этап идентификации опорного сигнала, переносимого информационным каналом.
25. Способ по п.22, в котором пилот-сигнал и опорный сигнал мультиплексируются с кодовым разделением в интервал времени.
26. Способ по п.22, дополнительно содержащий этап поиска пилот-сигнала.
27. Способ по п.26, в котором поиск пилот-сигнала основан на принятом опорном сигнале.
28. Способ по п.22, в котором сигнал, имеющий символы, по существу, идентичные символам пилот-сигнала, служит в качестве опорного сигнала.
29. Устройство для обеспечения определения местоположения в беспроводной связи, содержащее: средство для приема сигналов в интервале времени, имеющем канал пилот-сигнала и информационный канал; и средство для выполнения измерения местоположения, основанного на пилот-сигнале и опорном сигнале.
30. Устройство по п.29, дополнительно содержащее средство для поиска пилот-сигнала.
31. Способ для обеспечения определения местоположения в беспроводной связи, содержащий этапы, на которых: принимают пилот-сигнал и часть канала управления и выполняют измерение местоположения, основанное на пилот-сигнале и части канала управления.
32. Способ по п.31, в котором часть канала управления содержит преамбулу.
| Стенд для сборки и разборки узлов | 1987 |
|
SU1505742A1 |
| WO 2005098466 А1, 2005.10.20 | |||
| US 2003125046 А1, 2003.07.03 | |||
| US 2003162547 A1, 2003.08.28 | |||
| АРХИТЕКТУРА МНОГОПОЛЬЗОВАТЕЛЬСКОЙ СИСТЕМЫ СВЯЗИ С РАСПРЕДЕЛЕННЫМИ ПЕРЕДАТЧИКАМИ | 1998 |
|
RU2195771C2 |
| СПОСОБ И УСТРОЙСТВО ВЫСОКОСКОРОСТНОЙ ПЕРЕДАЧИ ПАКЕТНЫХ ДАННЫХ | 1998 |
|
RU2233045C2 |

