Изобретение относится к преобразователям кинетической энергии потока жидкости или газа в энергию механического движения и может быть использовано в ветроэлектростанциях, ветронасосных установках, гидроэлектростанциях и других подобных устройствах.
Известен "преобразователь кинетической энергии потока сплошной среды в механическую энергию"(RU 2338923 С1), в котором энергия потока преобразуется в энергию механического движения линейно колеблющейся обоймы с установленными в ней поворотными аэродинамическими пластинами (планами). Такой преобразователь обеспечивает большую мощность, чем преобразователь вращательного типа. Однако экспериментально установлено, что его мощность можно повысить. Данное техническое решение можно принять за прототип.
Задача настоящего изобретения состоит в повышении развиваемой преобразователем колебательного типа мощности.
Указанная задача решается тем, что в преобразователе кинетической энергии потока сплошной среды в механическую энергию, содержащем корпус, подвижную обойму с набором поворотных аэродинамических планов, механизм кинематической связи между планами, ограничители углов их поворота и аккумуляторы механической энергии, в корпусе размещена имеющая свободу линейного движения между аккумуляторами механической энергии дополнительная обойма с установленными в ней невращающимися аэродинамическими планами.
На фиг.1 представлена схема преобразователя.
На фиг.2 представлена схема плана, повернутого относительно обоймы на угол α.
На фиг.3 представлена схема плана, повернутого относительно обоймы на угол -α.
Преобразователь (вид сверху) состоит из корпуса 1, на который через поступательные кинематические пары 2 опирается обойма 3. В обойме со свободой поворота между угловыми ограничителями 4 и 5 размещены профилированные аэродинамические планы 6, связанные между собой кинематическим механизмом 7, обеспечивающим одинаковость их углов поворота. Оси поворотов планов сдвинуты от центров давления (ЦД) в сторону их хвостовиков на расстояние l1. Суммарный центр масс (ЦМ) планов и механизма кинематической связи сдвинут от осей поворота в сторону хвостовиков планов на расстояние l2. Обойма 3 имеет свободу линейного возвратно-поступательного движения между аккумуляторами 8 и 9 механической энергии, установленными на корпусе 1 в плоскости I-I осей поворота планов. (Плоскость I-I перпендикулярна плоскости листа.) На обойме 3 установлено также устройство 10 связи с нагрузкой. Со стороны оконечностей аэродинамических планов обоймы 3 в корпусе установлена в поступательных кинематических парах 11 со свободой линейного движения между аккумуляторами 8 и 9 обойма 12. В ней размещены невращающиеся аэродинамические планы 13 и устройство 14 связи с нагрузкой. Плоскости планов 13 перпендикулярны направлению движения обоймы 12. Планы 6 и 13 имеют оптимальные для данной схемы толщину, удлинение и профиль сечений, например, симметричный. Аккумуляторы механической энергии 8 и 9 могут быть выполнены, например, в виде пневматических пружин. Конструкция поступательной кинетической пары подвеса обоймы определяется двумя главными требованиями - прочность и малое трение. Геометрические и прочностные показатели планов определяются обтекающей средой (газ, жидкость), скоростью потока и размерами преобразователя.
Работает предлагаемый преобразователь следующим образом.
При обтекании потоком среды планов 6, ориентированных к вектору его скорости VB под некоторым докритическим углом атаки, т.е. углом между направлением вектора скорости потока и плоскостью плана α (фиг.2), на каждом плане, как известно из аэродинамики (см., например, Стасенко А.Л. Физика полета, Москва, Наука, 1988) развивается приложенная в центре давления аэродинамическая подъемная сила:
 ,
,
где ρ - удельная плотность среды,
S - обтекаемая площадь плана,
Су - коэффициент подъемной силы, зависящий от угла α.
Направление подъемной силы определяется знаком угла атаки. Явление, аналогичное возникновению подъемной силы на крыле летательного аппарата.
Под действием суммарной силы FΣ=nFa, где n - количество планов в обойме 3, обойма движется в направлении силы FΣ, например, в сторону аккумулятора 8, с ускорением
 ,
,
где m - масса обоймы с размещенными в ней элементами, развивает линейную скорость V1(t)=∫adt и накапливает кинетическую энергию  .
.
При этом шток механизма 7 под действием момента силы

прижимается к ограничителю 4, что обеспечивает постоянство угла атаки α.
В момент подхода обоймы 3 к аккумулятору 8 обойма 3 натыкается на шток аккумулятора 8, перемещает его, отдавая аккумулятору накопленную кинетическую энергию, и затормаживается. В то же время центр масс планов продолжает движение по инерции в направлении силы FΣ, что приводит к развитию относительно их осей поворота момента силы инерции

где W(t) - ускорение торможения, направленного противоположно моменту Мn.
Если конструкционными мерами обеспечено условие
планы начнут поворачиваться в обойме 3 так, что угол атаки меняется на противоположный по знаку. Поскольку планы соединены между собой кинематической связью 7, они поворачиваются на одинаковые углы. В процессе торможения обоймы и поворота планов шток механизма 7 натыкается на угловой ограничитель 5, который ограничивает угол поворота планов конструкционно-заданным значением.
В некоторый момент времени кинетическая энергия обоймы 3 оказывается полностью поглощенной аккумулятором 8, движение обоймы и поворот планов прекращаются. В этот момент планы оказываются повернутыми относительно обоймы 3 на угол минус α(фиг.3). С этого момента сила FΣ меняется на противоположную - минус FΣ. Одновременно аккумулятор 8 отдает поглощенную кинетическую энергию обойме 3 и она, используя отданную ей аккумулятором энергию и воздействие силы FΣ, движется к противоположной стороне корпуса 1 со скоростью V2(t). При ее подходе к аккумулятору 9 происходят явления, аналогичные имеющим место при подходе к аккумулятору 8, только теперь угол атаки планов 6 меняется на плюс α. Так процесс периодически повторяется, т.е. обойма совершает линейные возвратно-поступательные движения между аккумуляторами 8 и 9. В результате предельная развиваемая ею скорость будет
 ,
,
где К∂ - коэффициент демпфирования,
а максимальная мощность составит
Средняя за период колебательного движения мощность
При холостом, т.е. без нагрузки на устройстве 10, движении обоймы демпфирование создается только силами трения элементов обоймы 3 об окружающую среду. Если же устройство 10 связи с нагрузкой присоединено, например, к линейному электрогенератору, коэффициент K∂ будет главным образом определяться скоростным сопротивлением генератора.
В каждой фазе движения обоймы 3 с каждого ее плана 6 сходит отклоненный на угол атаки по отношению к его начальному направлению поток обтекающей среды. Этот поток омывает планы 13 обоймы 12 (фиг.2, 3) и на них также развивается аэродинамическая подъемная сила, но уже противоположного по отношению к подъемной силе планов 13 обоймы 3 знака, т.к. угол атаки планов 13 оказывается противоположным по знаку углу атаки планов 6. Под действием этой силы обойма 12 движется в сторону, противоположную направлению движения обоймы 3, и в момент торможения обоймы 3 натыкается на аккумулятор механической энергии, отдает ему накопленную кинетическую энергию и затормаживается. В момент смены направления движения обоймы 3 меняется вследствие изменения угла атаки планов 6 на противоположный угол обтекания потоком планов 13, меняется на противоположное направление возникшей на них подъемной силы (фиг.3), аккумулятор механической энергии отдает запасенную им энергию обойме 12, и она под действием подъемной силы уже противоположного направления и отданной аккумулятором энергии движется в обратном направлении. Такой процесс периодически повторяется. При правильном соотношении параметров обоймы 3 с параметрами обоймы 12 обе обоймы движутся в противофазе. Противофазное движение обусловлено синхронным воздействием на планы 6 и 13 одинаковых по модулю, но противоположно направленных аэродинамических сил. В свою очередь синхронность сил определяется принципом неразрывности потока. Взаимодействие потока с планами 6 и 13 совершенно аналогично взаимодействию направляющего аппарата газовой турбины с ее рабочим колесом. Мощность, развиваемая обоймой 12, при правильном соотношении ее параметров с параметрами обоймы 3 будет равна мощности обоймы 3.Развиваемая обоймой 12 мощность может быть передана нагрузке через устройство связи 14.
Таким образом, технический эффект изобретения состоит в том, что суммарная мощность преобразователя оказывается вдвое больше мощности преобразователя-прототипа, поскольку одновременно в одном устройстве работают две группы аэродинамических планов. При этом конструкция обоймы 12 проще конструкции обоймы 3.
Изобретение относится к технике энергетических преобразователей и может быть использовано в ветроэнергетических, гидроэнергетических электростанциях, насосных установках и подобных устройствах. Преобразователь кинетической энергии потока сплошной среды в механическую энергию содержит корпус 1, подвижную обойму 3 с набором поворотных аэродинамических планов 6, механизм кинематической связи 7 между планами 6, ограничители углов их поворота 4 и 5 и аккумуляторы механической энергии 8 и 9. В корпусе 1 размещена имеющая свободу линейного движения между аккумуляторами 8 и 9 механической энергии дополнительная обойма 12 с установленными в ней неврающимися аэродинамическими планами 13. Изобретение направлено на повышение развиваемой преобразователем колебательного типа мощности. 3 ил.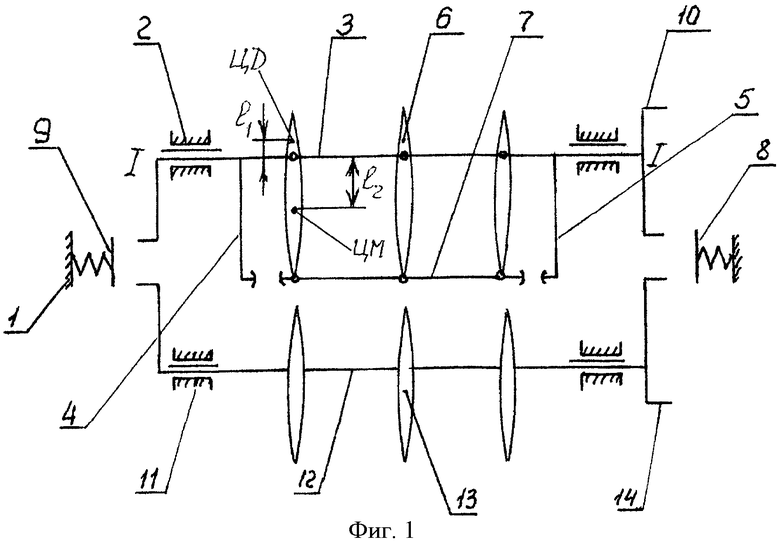
Преобразователь кинетической энергии потока сплошной среды в механическую энергию, содержащий корпус, подвижную обойму с набором поворотных аэродинамических планов, механизм кинематической связи между планами, ограничители углов их поворота и аккумуляторы механической энергии, отличающийся тем, что в корпусе размещена имеющая свободу линейного движения между аккумуляторами механической энергии дополнительная обойма с установленными в ней не врающимися аэродинамическими планами.
| ПРЕОБРАЗОВАТЕЛЬ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ПОТОКА СПЛОШНОЙ СРЕДЫ В МЕХАНИЧЕСКУЮ ЭНЕРГИЮ | 2007 |
|
RU2338923C1 |
| RU 2005204 C1, 30.12.1993 | |||
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ПЕРЕМЕЩЕНИЕ КРЫЛА И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2141058C1 |
| US 4347036 A, 31.08.1982 | |||
| DE 10118407 A, 03.01.2002. | |||

