Изобретение относится к области нетрадиционной энергетики, в частности к способам преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла и к установкам для его осуществления и может быть использовано как источник электрической, тепловой и механической энергии в гидро- и ветроустановках.
Предшествующий уровень техники.
В связи с ухудшением экологии Земли и удорожанием энергоносителей, постоянно растущим дефицитом энергоресурсов, приобретает большое значение использование такого возобновляемого источника энергии, как естественное течение равнинных рек, путем создания бесплотинных гидроэнергетических станций, не нарушающих их русла.
Скорость течения рек на равнинных участках составляет примерно от 0,2 - 0,4 м/с до 3 м/с. Преимущественно, среднеклиматическая скорость течения составляет около 1 м/с. При таких низких скоростях течения использование традиционных преобразователей кинетической энергии потока воды в механическую - гидротурбин - является неэффективным. Например, для получения 1 кВт энергии при скорости потока 1 м/с необходима гидротурбина диаметром не менее 3,5 м, которая перекрывает примерно 10 кв.м поперечного сечения русла реки. Установка громоздка и дорога. Снижение габаритов гидротурбин возможно при больших скоростях потока, поэтому они и нашли свое применение в напорных и рукавных конструкциях.
Широко известны системы и других типов, например, аксиальные, роторные и т. п., однако они также имеют большие габариты и очень дороги.
Проблема использования такого возобновляемого источника энергии, как свободный поток текучей среды, состоит в повышении эффективности конструкций преобразующих кинетическую энергию потока в другие виды энергии.
Давно известны, например, конструкции ветряных двигателей с винтом, в которых для улучшения их характеристик применяется поворот лопастей для регулирования углов их атаки в процессе его работы. Например, конструкция ветряного двигателя, созданная в 1923 г. проф. Г.Х.Сабининым и реализованная в стабилизаторных ветряках (см. патент СССР N 2496).
Однако, при преобразовании кинетической энергии потока текучей среды в механическую с помощью винтов, реализуемые величины углов атаки лопастей этих винтов ограничены срывом потока и не могут быть выше "критических", поэтому практическое применения таких устройств ограничено и в потоках с невысокими скоростями их использование экономически нецелесообразно.
Значительно более эффективной конструкцией, преобразующей кинетическую энергию потока в другие виды энергии, является устройство типа "колеблющееся крыло" (см., например, патент США N 4470770). Это устройство позволяет реализовать преимущества нестационарного режима обтекания крыла, а, именно дает возможность использовать углы атаки, превышающие "критические", и потому снимать большую полезную нагрузку с единицы площади рабочего органа (крыла).
Известна, например, установка для преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла (см., например, патент США N 4595336). Установка содержит неподвижную опору, на которой подвижно закреплена балка. На балке шарнирно закреплены крылья. На крыльях с помощью шарниров установлены крыловидные элементы. Эти крыловидные элементы снабжены приводом для управления их угловым положением относительно крыла. Этот привод в крайних положениях качания балки с помощью пружины скачком должен изменять угол крыловидных элементов на противоположный. Балка связана с преобразователем возвратно-поступательного перемещения крыла в механическую энергию.
В потоке текучей среды угол атаки крыла определяется величиной углового положения крыловидного элемента относительно крыла. На крыле, обтекаемом потоком текучей среды с углом атаки, возникает гидродинамическая сила. Составляющая ее, направленная поперек продольной оси балки, создает момент, в результате чего балка с шарнирно закрепленными на ней крыльями получает механическое перемещение, совершая при этом полезную работу. Около крайних положений колебаний балки привод управления угловым положением крыловидного элемента относительно крыла должен изменить значение этого угла на противоположное. В результате чего угол атаки крыла должен измениться на противоположный, должен измениться знак момента от гидродинамических сил крыла, и балка должна получить механическое перемещение в обратную сторону. Таким образом, по замыслу автора, должно осуществляться возвратно-поступательное перемещение крыла.
Однако управляемые поверхности в виде крыловидных элементов установлены на крыльях так, что они являются продолжением его профиля. Аэрогидродинамические характеристики, а именно подъемная сила и качество крыла, имеющего профиль с отогнутой вверх хвостовой частью, очень низкие. Обтекание крыловидных элементов сильно зависит от угла атаки крыла и нет возможности получать большие их значения. Следовательно, работа установки не может быть эффективной.
Расположение центра аэродинамических сил сзади оси шарнирной подвески крыла уменьшает общую аэродинамическую силу, действующую на крыло с крыловидным элементом, т. е. уменьшает эффективность установки.
В процессе поворота балки от одного крайнего положения к другому происходит изменение углового положения крыловидного элемента до нулевого значения, т. е. в процессе перемещения балки происходит изменение углов атаки крыла до нуля, а следовательно, уменьшается аэродинамическая сила, балка остановится, и изменение углового положения крыловидного элемента на противоположное значение происходить не будет. Значит, не будет происходить возвратно-поступательного перемещения крыла.
Раскрытие изобретения
Задачей настоящего изобретения является создание такого способа преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла и установки для его осуществления, которые бы за счет использования оптимального закона движения крыла с углами атаки выше "критических" обеспечили бы значительное повышение эффективности преобразования кинетической энергии текучей среды в другие виды энергии.
Эта задача решается тем, что в способе преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла, заключающемся в том, что в текучую среду помещают крыло, которое устанавливают под углом атаки к направлению движения потока текучей среды, в результате чего крыло под действием гидродинамических сил, действующих на него, получает механическое перемещение в направлении поперек направлению движения потока текучей среды, а для изменения направления перемещения крыла установленный угол атаки крыла изменяют на противоположный, согласно изобретению, при поступательном перемещении крыла установленный угол атаки выдерживают постоянным путем изменения угла между хордой крыла и направлением движения потока текучей среды.
Это дает возможность повысить эффективность преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла.
Целесообразно, при достижении оптимального отношения скорости перемещения крыла к скорости движения потока текучей среды, угол между хордой крыла и направлением движения этого потока выдерживать постоянным.
Это позволяет получить оптимальный закон движения крыла и, таким образом, обеспечить значительное повышение эффективности преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла.
В крайних положениях, перед осуществлением возвратного перемещения крыла, скорость его перемещения можно замедлять путем превращения кинетической энергии движущегося крыла в потенциальную, а затем при возвратном перемещении потенциальную энергию превращать в кинетическую, сообщая ему дополнительное ускорение и уменьшая тем самым время разгона крыла.
Это позволяет достигать оптимальных скоростей перемещения крыла при использовании углов атаки выше "критических" и максимально увеличить эффективность установки.
Эта задача решается также тем, что в установке для преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла, содержащей неподвижную опору, подвижно связанную с балкой, на которой шарнирно закреплено, по меньшей мере, одно крыло, снабженное устройством установки угла атаки, выполненным в виде крыловидного элемента, снабженного собственным приводом для управления его угловым положением относительно крыла, причем балка связана с преобразователем возвратно-поступательного перемещения крыла в механическую энергию, согласно изобретению ось шарнирного соединения, связывающего балку и крыло, расположена на расстоянии примерно от 0 до 1/3 хорды крыла, а сам крыловидный элемент расположен вне области обтекания крыла текучей средой.
Это позволяет получать углы атаки крыла выше "критических", что обеспечивает значительное повышение эффективности преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла.
Возможно крыло снабдить управляемым закрылком, угол отклонения которого относительно крыла по направлению противоположен углу отклонения крыловидного элемента относительно крыла.
Это позволяет еще более повысить эффективность преобразования кинетической энергии текучей среды в другие виды энергии.
Балка может быть связана с неподвижной опорой посредством шарнирного соединения.
Это дает возможность упростить установку.
На неподвижной опоре можно жестко закрепить направляющие, в которых с возможностью возвратно-поступательного перемещения установлена балка.
Это дает возможность получить оптимальную траекторию движения крыла.
Целесообразно, на неподвижной опоре в крайних положениях перемещения балки установить упругие ограничители.
Упругие ограничители крайних положений можно установить на балке.
Это позволяет достигнуть оптимальных скоростей перемещения крыла и максимально увеличить эффективность установки.
Привод для управления угловым положением крыловидного элемента относительно крыла может быть выполнен в виде кулачкового механизма, содержащего кулачок, закрепленный на оси шарнирного соединения, связывающего балку с крылом, и связанный тягой с кулисным механизмом; толкатель установлен в направляющих, закрепленных на крыле, оперативно взаимодействующий с кулачком и через систему рычагов связанный с крыловидным элементом.
Это позволяет получать необходимые углы атаки крыла во время его движения и обеспечивает возвратно-поступательное перемещение крыла.
Кроме того, привод для управления угловым положением крыловидного элемента относительно крыла может быть выполнен в виде механизма, содержащего двуплечий рычаг, закрепленный на оси шарнирного соединения, связывающего балку с крылом, одно плечо его связано тягой с кулисным механизмом, на другом плече его установлен палец, взаимодействующий с переключателем, шарнирно установленным на крыле, который в свою очередь связан через систему рычагов с крыловидным элементом.
Это упрощает конструкцию привода.
Возможно привод для управления угловым положением крыловидного элемента относительно крыла выполнить в виде храпового механизма, который содержит храповое колесо, ось которого совмещена с осью шарнирного соединения крыла с балкой, жестко связанное с самой балкой; собачку, шарнирно установленную на крыле и оперативно взаимодействующую с храповым колесом, а также через палец, установленный на ней, с переключателем, шарнирно закрепленный на крыле и через систему рычагов связанный с крыловидным элементом.
Это обеспечивает работоспособность установки при неравномерном потоке текучей среды и при сильных колебаниях нагрузки.
Привод для управления угловым положением крыловидного элемента относительно крыла может содержать инерционную массу, установленную на крыловидном элементе, и ограничители углового положения крыловидного элементу, установленные на крыле.
Это максимально упрощают конструкцию привода для управления угловым положением крыловидного элемента относительно крыла.
Краткое описание чертежей.
В дальнейшем патентуемое изобретение поясняется конкретными примерами его выполнения и прилагаемыми чертежами, на которых:
фиг. 1 изображает крыло в потоке текучей среды и векторы скоростей крыла и сил, действующих на него во время движения, согласно изобретению;
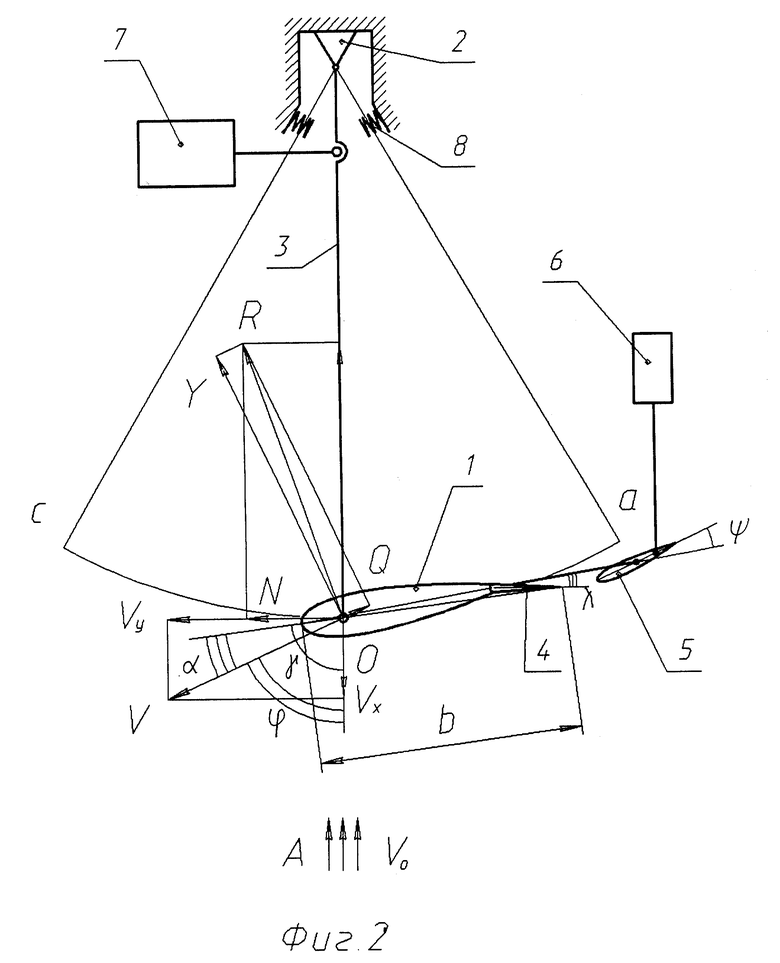
фиг. 2 изображает принципиальную схему установки для преобразования кинетической энергии текучей среды в другой вид энергии, согласно изобретению;
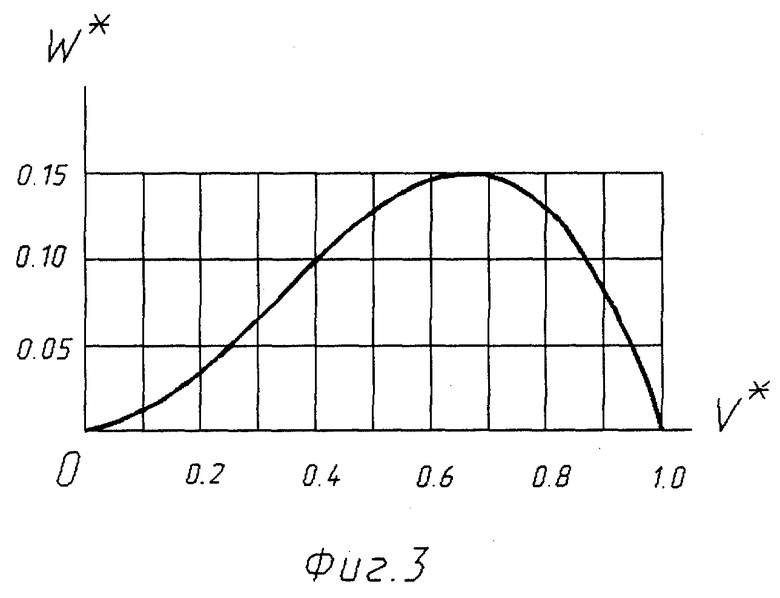
фиг. 3 изображает график зависимости безразмерного коэффициента мощности от безразмерного коэффициента скорости, согласно изобретению;
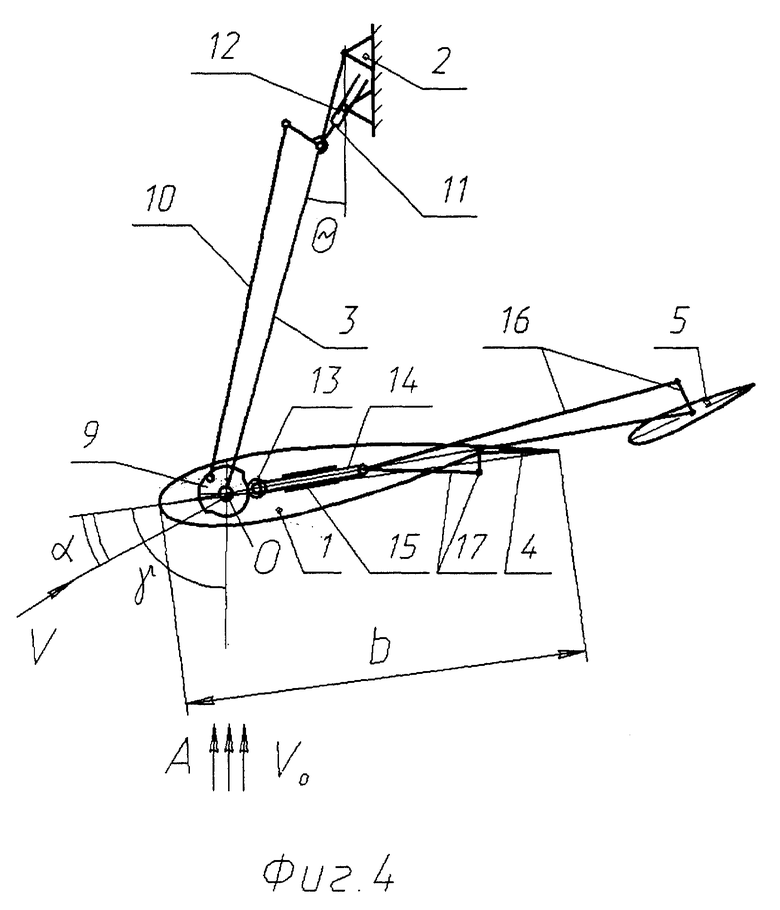
фиг. 4 изображает кинематическую схему привода с кулачковым и кулисным механизмами для управления угловым положением крыловидного элемента относительно крыла, согласно изобретению;
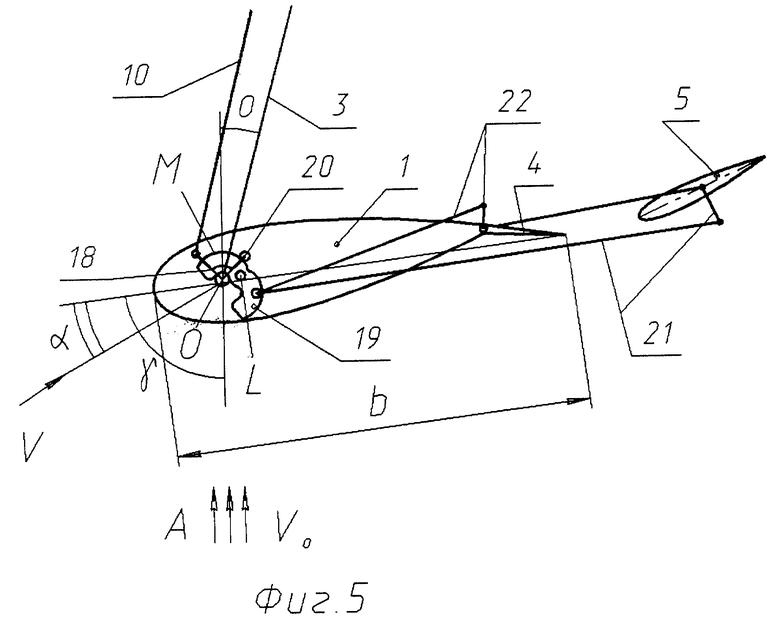
фиг.5 изображает кинематическую схему привода с переключателем для управления угловым положением крыловидного элемента относительно крыла, согласно изобретению;
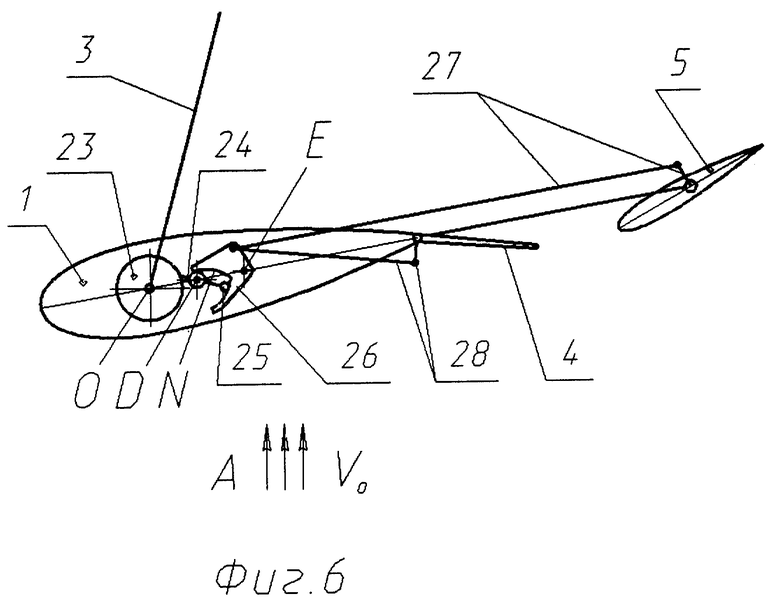
фиг. 6 изображает кинематическую схему привода с храповым механизмом для управления угловым положением крыловидного элемента относительно крыла, согласно изобретению;
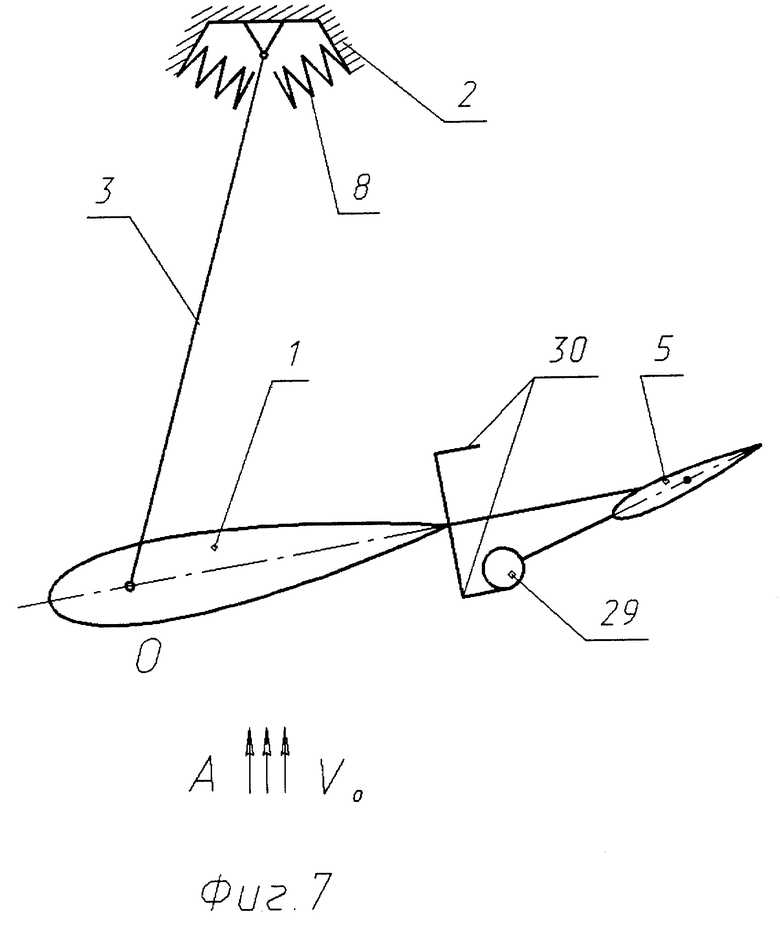
фиг. 7 изображает принципиальную схему привода с инерционной массой, согласно изобретению.
Лучший вариант осуществления изобретения
Способ преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла состоит из следующих операций.
В поток текучей среды (показанный стрелкой А), движущейся со скоростью V0, помещают крыло 1 (фиг. 1), которое имеет возможность перемещаться поперек этого потока А.
Около крайнего положения "a" крыло 1 устанавливают под углом α атаки к направлению движения потока A текучей среды, в результате чего оно под действием гидродинамической силы R, возникшей на нем, получает механическое перемещение в направлении к положению "c" поперек направления движения потока A текучей среды, совершая при этом полезную работу.
В процессе увеличения скорости Vy перемещения крыла 1 установленный угол α атаки выдерживают постоянным путем изменения угла γ между хордой b крыла 1 и направлением движения потока А текучей среды.
Около другого крайнего положения "c" угол γ между хордой b крыла 1 и направлением движения потока A изменяют на противоположный, изменяется угол α атаки на противоположное значение, в результате изменяется воздействие гидродинамической силы R на крыло 1, и оно совершает возвратное перемещение к положению "a", также совершая при этом полезную работу.
В процессе увеличения скорости Vy перемещения крыла 1 вновь установленный угол α атаки выдерживают постоянным, путем изменения угла γ между хордой b крыла 1 и направлением движения потока А текучей среды.
Около положения "a" снова угол γ между хордой b крыла 1 и направлением движения потока A изменяют на противоположный, и изменяется угол α атаки на первоначальное по величине значение, в результате чего опять изменяется воздействие гидродинамической силы R на крыло 1, и оно снова совершает возвратное перемещение к положению "c", совершая при этом полезную работу.
После чего цикл повторяют.
Около положения "c" скорость Vy перемещения крыла 1 уменьшают, одновременно с этим угол γ между хордой b крыла 1 и направлением движения потока A изменяют на противоположный. В процессе замедляющегося движения угол α атаки уменьшают. В результате уменьшается гидродинамическая сила R и скорость Vy перемещения крыла 1 уменьшается до нуля. При этом продолжают изменять угол γ между хордой b крыла 1 и направлением движения потока A и изменять угол α атаки на противоположное значение. В результате этого изменяется воздействие гидродинамической силы R, действующей на крыло 1, и оно совершает возвратное перемещение в направлении поперек направлению движения потока A текучей среды к положению "a", совершая при этом полезную работу.
Около положения "a" снова скорость Vy перемещения крыла 1 уменьшают. Одновременно с этим опять угол γ между хордой b крыла 1 и направлением движения потока A изменяют на противоположный. В процессе замедляющегося движения снова уменьшают угол α атаки. В результате уменьшения гидродинамической силы R скорость Vy перемещения крыла 1 уменьшается до нуля. При этом продолжают изменять угол γ между хордой b крыла 1 и направлением движения потока A и изменять угол α атаки на противоположное значение. В результате снова изменяется воздействие гидродинамической силы R, действующей на крыло 1, и оно снова совершает возвратное перемещение в направлении поперек направлению движения потока А текучей среды к положению "c", совершая при этом полезную работу.
Уменьшение скорости Vy перемещения крыла 1 может происходить, например, таким образом: в результате перемещения крыла 1 с закритическими углами α атаки через некоторое время возникнет срыв потока на нем, гидродинамическая сила R изменится так, что составляющая N, направленная поперек потока, уменьшится, а следовательно, уменьшится скорость Vy.
Уменьшение скорости Vy перемещения крыла 1 лучше производить путем превращения части работы гидродинамической силы R, действующей на крыло 1, в потенциальную энергию, уменьшая либо полностью отключив полезную нагрузку. A при возвратном перемещении крыла 1 эту потенциальную энергию возвращают ему, сообщая крылу 1 дополнительное ускорение и уменьшая тем самым время его разгона.
Скорость Vy перемещения крыла 1 с увеличением числа циклов будет возрастать, и при достижении оптимального отношения скорости Vy перемещения крыла 1 к скорости V0 движения потока A текучей среды, угол γ между хордой b крыла 1 и направлением движения потока A сохраняют постоянным, выдерживая, таким образом, оптимальное по величине значение отношения скорости Vy перемещения крыла 1 к скорости V0 движения потока A текучей среды, путем выбора геометрических параметров крыла 1 и угла α атаки его для соответствующей нагрузки. В результате этого происходит максимально эффективное преобразование кинетической энергии текучей среды в возвратно-поступательное перемещение крыла 1.
Установка заявляемая (фиг. 2), осуществляющая патентуемый способ преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла, содержит неподвижную опору 2, подвижно связанную с ней балку 3, на которой шарнирно в точке "О" закреплено по меньшей мере одно крыло 1.
На крыле 1 установлены управляемый закрылок 4 и устройство управления углом α атаки крыла 1, выполненное в виде крыловидного элемента 5, расположенного вне области обтекания потоком A текучей среды крыла 1, что обеспечивает высокие гидродинамические характеристики крыла 1.
Крыловидный элемент 5 снабжен собственным приводом 6 для управления его угловым положением относительно крыла 1.
Ось "О" шарнирного соединения расположена на расстоянии примерно от 0 до 1/3 хорды b крыла 1, что обеспечивает установку и выдерживание углов α атаки крыла 1 с помощью крыловидного элемента 5.
Преобразователь 7 предназначен для преобразования возвратно-поступательного перемещения крыла 1 в другие виды энергии, например электрическую, тепловую, механическую.
На неподвижной опоре 2 в крайних положениях перемещения балки 3 установлены упругие ограничители 8, это позволяет достигать оптимальных скоростей перемещения крыла и максимально увеличить эффективность установки.
Хотя на фигурах представлен один крыловидный элемент 5, следует иметь в виду, что их может быть и больше, например два и т. д.
Заявляемая установка работает следующим образом.
В поток текучей среды (показанный стрелкой А, на фиг. 2), движущийся со скоростью V0, помешают крыло 1 с крыловидным элементом 5, шарнирно закрепленное в т. "О" на подвижной балке 3, связанной с неподвижной опорой 2. Крыло 1 с помощью подвижной балки 3 имеет возможность перемещаться поперек потока А.
В крайнем положении "a" крыло 1 устанавливают под углом α атаки к направлению движения потока A текучей среды, путем установки приводом 6 угла ψ крыловидного элемента 5 относительно крыла 1. Если крыло 1 снабжено управляемым закрылком 4, то последний устанавливают под углом λ относительно крыла 1 по направлению, противоположному углу ψ установки крыловидного элемента 5 относительно крыла 1. В результате чего крыло 1 под действием гидродинамической силы R, возникшей на нем, получает механическое перемещение в направлении поперек направлению движения потока А текучей среды к положению "c", совершая при этом полезную работу, которая преобразователем 7 преобразуется в другие виды энергии, например электрическую, тепловую, механическую.
В процессе увеличения скорости Vy перемещения крыла 1 с крыловидным элементом 5, угол ϕ набегающего потока V изменяется, равновесие системы крыло 1 с крыловидным элементом 5 нарушается, на крыловидном элементе 5 возникает восстанавливающий момент, который возвращает систему крыло 1 с крыловидным элементом 5 в равновесное состояние, поворачивая при этом крыло 1 в шарнире "О", т. е. изменяя угол γ между хордой b крыла 1 и направлением движения потока А текучей среды и выдерживая таким образом постоянным установленный угол α атаки.
Около другого крайнего положения "c" изменяют угол ψ крыловидного элемента 5 относительно крыла 1 на противоположный. Если крыло 1 снабжено управляемым закрылком 4, то угол λ его установки относительно крыла 1 изменяют на противоположный. В результате изменяется угол γ между хордой b крыла 1 и направлением движения потока A, т. е. крыло 1 поворачивается. Причем противоположное значение угла ψ крыловидного элемента 5 относительно крыла 1 устанавливают до момента достижения углом γ между хордой b крыла 1 и направлением движения потока А нулевого значения, чтобы в этом положении на него продолжал действовать момент поворачивающий крыло 1 в шарнире "О". В процессе этого поворота изменяется угол α атаки на противоположный, изменяется воздействие гидродинамической силы R на крыло 1, и оно начинает возвратное перемещение к положению "a", также совершая при этом работу, которая в преобразователе 7 преобразуется в другие виды энергии.
В процессе увеличения скорости Vy перемещения крыла 1, угол ϕ набегающего потока V опять изменяется, равновесие системы крыло 1 с крыловидным элементом 5 снова нарушается, на крыловидном элементе 5 возникает восстанавливающий момент, который возвращает систему крыло 1 с крыловидным элементом 5 в равновесное состояние, поворачивая при этом крыло 1 в шарнире "О", т. е. изменяя угол γ между хордой b крыла 1 и направлением движения потока А текучей среды, и выдерживая, таким образом, постоянным установленный угол α атаки.
Около положения "a" снова изменяют угол ψ крыловидного элемента 5 относительно крыла 1 на первоначальный. Если крыло 1 снабжено управляемым закрылком 4, то и его снова устанавливают в первоначальное положение под углом λ относительно крыла 1. В результате этого опять изменяется угол γ между хордой b крыла 1 и направлением движения потока А, т. е. крыло 1 снова поворачивается в шарнире "O". Причем опять противоположное значение угла ψ крыловидного элемента 5 относительно крыла 1 устанавливают до момента достижения углом γ между хордой b крыла 1 и направлением движения потока А своего нулевого значения. В процессе поворота крыла 1 изменяется угол α атаки на первоначальное значение, снова изменяется воздействие гидродинамической силы R на крыло 1, и оно начинает возвратное перемещение к положению "c", снова совершая при этом полезную работу.
После чего цикл повторяют.
При перемещении крыла 1 с закритическими углами α атаки, около крайнего положения "a", либо "c" на нем возникнет срыв потока, гидродинамическая сила R изменяется так, что составляющая N, направленная" поперек потока A, уменьшается и уменьшается скорость Vy перемещения крыла 1. Угол ϕ набегающего потока V тоже изменится, равновесие системы крыло 1 с крыловидным элементом 5 нарушится, на крыловидном элементе 5 возникает восстанавливающий момент, который возвращает систему крыло 1 с крыловидным элементом 5 в равновесное состояние, поворачивая при этом крыло 1 в шарнире "O", т. е. изменяя угол γ между хордой b крыла 1 и направлением движения потока A текучей среды.
Далее изменяют угол ψ крыловидного элемента 5 относительно крыла 1 на противоположное значение. Если крыло 1 снабжено управляемым закрылком 4, то его устанавливают под углом λ относительно крыла 1. В результате опять изменяется угол γ между хордой b крыла 1 и направлением движения потока A, т. е. крыло 1 поворачивается в шарнире "O". Причем опять противоположное значение угла ψ крыловидного элемента 5 относительно крыла 1 устанавливают до момента достижения углом γ между хордой b крыла 1 и направлением движения потока А нулевого значения, чтобы в этом положении на него продолжал действовать момент, поворачивающий крыло 1 в шарнире "O". В процессе этого поворота изменяется угол α атаки на противоположное значение, изменяется воздействие гидродинамической силы R на крыло 1, и оно начинает возвратное перемещение к положению "c", либо "a", соответственно, также совершая при этом работу, которая в преобразователе 7 преобразуется в другой вид энергии.
Уменьшение скорости Vy перемещения крыла 1 лучше производить путем превращения части работы гидродинамической силы в потенциальную энергию, для чего в крайних положениях "a" и "c" устанавливают упругие ограничители 8.
В этих положениях желательно уменьшать, а лучше полностью отключать полезную нагрузку в преобразователе 7. И затем, при возвратном перемещении крыла 1 потенциальную энергию возвращают, сообщая крылу 1 дополнительное ускорение и уменьшая тем самым время его разгона, после чего снова подключают полезную нагрузку. В этом случае противоположное значение угла ψ крыловидного элемента 5 относительно крыла 1 не обязательно устанавливать до момента достижения углом γ между хордой b крыла 1 и направлением движения потока A своего нулевого значения.
Скорость Vy перемещения крыла 1 с увеличением числа циклов возрастает, и при достижении оптимального отношения скорости Vy перемещения крыла 1 к скорости V0 движения потока A текучей среды, угол γ между хордой b крыла 1 и направлением движения потока A сохраняют постоянным, выдерживая, таким образом, оптимальное по величине значение отношения скорости Vy перемещения крыла 1 к скорости V0 движения потока A текучей среды.
Все вышеизложенное вытекает из следующего.
Рассмотрим крыло 1 (фиг. 1), помещаемое в поток A текучей среды, с плотностью ρ и движущейся со скоростью V0. Крыло 1 имеет возможность перемещаться поперек этого потока A. Пусть в данный момент времени крыло 1 имеет угол α атаки.
На крыле 1, обтекаемом потоком текучей среды с углом α атаки, возникает гидродинамическая сила R. Составляющая N, направленная поперек потока A текучей среды, совершает полезную работу по перемещению крыла 1.
Рассмотрим момент, когда скорость Vy перемещения крыла 1 постоянна.
Для установившегося режима движения с постоянной скоростью Vy = const, V0 = const, сила N проделывает полезную работу по перемещению крыла 1 вдоль оси Oy:
N = Y•cosϕ-Q•sinϕ (1)
где Y = 0,5•Cy•ρ•V2•S, Q = 0,5•Cx•ρ•V2•S - гидродинамические силы;
Cy - коэффициент подъемной силы Y крыла 1;
Cx - коэффициент сопротивления Q крыла 1; суммарная скорость крыла 1 относительно текучей среды;
суммарная скорость крыла 1 относительно текучей среды;
S - площадь крыла;
ϕ - угол набегающего потока (угол между вектором скорости V и вектором скорости Vx).
Мощность, снимаемая с крыла 1,
W = N • Vy (2)
Подставляя в (2) значения Cy/Cx = K - качество крыла 1, а также учитывая, что Vx = V0, cos(ϕ) = Vx/V и sin(ϕ) = Vy/V и введя безразмерные величины
V* = Vy/V0 • K
получим выражение для мощности, снимаемой с крыла 1, при установившемся движении в виде
W = W*•(0,5•Cy•ρ•S•V
На фиг. 3 приведены графики зависимости W* от V*. Максимальное значение W* ≈ 0,15 получается при V* ≈ 0,65.
Отсюда можно сделать вывод: работа крыла 1 в качестве двигателя эффективнее тогда, когда скорость его перемещения
Vy = 0,65 • V0 • K (6)
Так при K = 10 - 50
Vy = (6,5 - 32,5) • V0. (7)
Таким образом, оптимальной является скорость Vy перемещения крыла 1, примерно равная от 6,5 до 32,5 скорости V0 движения потока A текучей среды.
При этом оптимальным является угол α атаки, при котором "качество" K крыла 1 имеет значение около максимального, т.е. такой, при котором отношение коэффициента Cy подъемной силы к коэффициенту Cx сопротивления имеет примерно максимальное значение:
K = Cy/Cx ≈ maxc. (8)
Привод 6 (фиг. 2) для управления угловым положением крыловидного элемента 5 относительно крыла 1 может быть выполнен в виде механизма (фиг. 4), содержащего кулачок 9, закрепленный на оси "O" шарнирного соединения, связывающего балку 3 с крылом 1. Профиль кулачка 9 образован двумя дугами с плавным переходом одна в другую. Кулачок 9 связан тягой 10 с кулисой 11, шарнирно закрепленной на балке 3. Ползун 12 кулисы 11 связан с неподвижной опорой 2. Кулачок 9 взаимодействует с роликом 13 толкателя 14. Толкатель 14 движется в направляющей 15, установленной на крыле 1. Прижатие ролика 13 к кулачку 9 осуществляется, например, пружинами (на фиг. 4 не показано). Толкатель 14 связан с крыловидным элементом 5, например, через систему рычагов 16.
На крыле 1 может быть установлен закрылок 4. В этом случае он также связан с толкателем 14, например, при помощи системы рычагов 17.
В процессе работы установки при перемещении крыла 1, оно поворачивается относительно балки 3 вокруг оси "O" шарнирного соединения. Ролик 13 обкатывается по поверхности кулачка 9. При изменении направления поворота крыла 1, толкатель 14, взаимодействующий через ролик 13 с кулачком 9, изменяет свое положение, т.е. переходит с одной поверхности дуги на другую, и через систему рычагов 16 меняет угловое положения крыловидного элемента 5 относительно крыла 1 из одного крайнего положения в другое.
Если на крыле 1 установлен закрылок 4, то и он изменяет свое угловое положение на противоположное через систему рычагов 17.
Положение ползуна 12 на неподвижной опоре 2 определяются тем, чтобы в крайнем положении отклонения балки 3, когда происходит поворот крыла 1, крыловидный элемент 5, должен быть переведен из одного крайнего положения в другое до того как угол γ между хордой b крыла 1 и направлением движения потока A текучей среды достигнет по величине угла, равного углу α атаки крыла 1.
Тяга 10 может быть связана непосредственно с неподвижной опорой 2 (на фиг. 4 не показано). В этом случае также расстояние между точками подвески на неподвижной опоре 2 балки 3 и тяги 10 определяется рабочим углом θ крайнего отклонения балки 3 от направления движения потока A текучей среды и углом α атаки крыла 1, так чтобы крыловидный элемент 5 был переведен из одного крайнего положения в другое до того, как угол γ между хордой b крыла 1 и направлением движения потока A текучей среды достигнет по величине угла, равного углу α атаки крыла 1.
Вместо кулачка 9 с толкателем 14 могут быть установлены двуплечий рычаг 18 (фиг. 5), закрепленный на оси "O" шарнирного соединения, связывающего балку 3 с крылом 1 и переключатель 19, шарнирно установленный на крыле 1 в т. "L". Одно плечо рычага 18 связано с тягой 10, на другом плече рычага 18 установлен палец 20, взаимодействующий с переключателем 19.
Переключатель 19 имеет два крайних положения, ограниченных упорами, установленными на крыле (например, на оси "O", как показано на фиг. 5, поскольку совпадают с геометрической осью "O"), и имеет блокировку, исключающую преждевременное срабатывание переключателя 19, например, в виде поверхности "M".
Переключатель 19 связан с крыловидным элементом 5, например, через систему рычагов 21.
На крыле 1 может быть установлен закрылок 4. В этом случае он также связан с переключателем 19, например, при помощи системы рычагов 22.
В процессе работы установки при перемещении крыла 1, оно поворачивается относительно балки 3 вокруг оси "O" шарнирного соединения. Палец 20 скользит по поверхности "M" переключателя 19. При изменении направления поворота крыла 1 палец 20 входит в зацепление с переключателем 19 и переводит его в другое крайнее положение, при этом через систему рычагов 21 изменяется угловое положение крыловидного элемента 5 относительно крыла 1 из одного крайнего положения в другое. Если на крыле 1 установлен закрылок 4, то и он изменяет свое угловое положение на противоположное через систему рычагов 22.
При угле θ отклонения балки 3 более величины угла α атаки крыла 1 палец 20 может быть установлен непосредственно на балке 3, в этом случае тяга 10, кулиса 11 и ползун 12 не устанавливаются.
Вместо кулисы 11 с ползуном 12 и тягой 10, можно установить храповое колесо 23 (фиг. 6), закрепленное на балке 3 в точке "O" ее шарнирного соединения с крылом 1 и взаимодействующее с собачкой 24, шарнирно установленной на крыле 1 в т. "D", которая через палец 25, установленный на ней, взаимодействует с переключателем 26, установленным в т. "E" на крыле 1.
Переключатель 26 имеет два крайних положения, ограниченных упорами, установленными на крыле (например, на оси "D", как показано на фиг. 6, и совпадают с геометрической осью "D"). Переключатель 26 имеет также блокировку, исключающую преждевременное его срабатывание, например, в виде поверхности "N". Кроме того, переключатель 26 связан через систему рычагов 27 с крыловидным элементом 5.
На крыле 1 также может быть установлен закрылок 4. В этом случае он также связан с переключателем 26 при помощи системы рычагов 28.
Храповое колесо 23 с собачкой 24 могут быть выполнены с зубчатым, фрикционным, роликовым и т.п. зацеплениями. На фиг. 6 эти зацепления подробно не изображены в силу их общеизвестности.
Чтобы избежать заклинивания собачки 24, она может быть подпружинена (на фиг. 6 не показано).
В процессе работы установки крыло 1 поворачивается относительно балки 3 с храповым колесом 23, вокруг оси "O" шарнирного соединения. Собачка 24 при этом скользит по поверхности храпового колеса 23. При изменении направления поворота крыла 1 собачка 24 входит в зацепление с храповым колесом 23 и изменяет свое угловое положение из одного положения в другое и также изменяет угловое положение переключателя 26 относительно крыла 1 из одного крайнего положения в другое и через систему рычагов 27 изменяет угловое положение крыловидного элемента 5. Если на крыле 1 установлен управляемый закрылок 4, то и он изменяет свое угловое положение через систему рычагов 28.
Привод 6 (фиг. 2) для управления угловым положением крыловидного элемента 5 относительно крыла 1, может быть выполнен в виде механизма (фиг. 7), содержащего инерционную массу в виде груза 29, закрепленного на крыловидном элементе 5. Крайние угловые положения крыловидного элемента ограничены упорами 30, установленными на самом крыле 1.
В крайних положениях перемещения балки 3 установлены упругие ограничители 8, которые могут находиться на неподвижной опоре 2 или на балке 3.
В процессе работы установки крыло 1 поворачивается относительно балки 3 вокруг оси "O" шарнирного соединения. Около крайнего положения перемещения крыла 1 скорость перемещения его замедляется с помощью упругих ограничителей 8, изменяется направление поворота крыла 1, и под действием инерционных сил, действующих на груз 29, крыловидный элемент 5 изменяет свое угловое положение относительна крыла 1 из одного крайнего положения в другое, ограниченное упорами 30.
Промышленная применимость
Патентуемый способ преобразования кинетической энергии текучей среды в возвратно-поступательное перемещение крыла и установка для его осуществления могут быть успешно применены при использовании таких возобновляемых источников энергии, какими являются энергия ветра и естественное течение рек, морей, океанов и т.п.
Использование заявляемого способа дает значительную экономию энергетических ресурсов.
Особенно важное значение приобретает использование установок на равнинных реках, имеющих невысокую скорость течения, где без строительства плотин не могут быть использованы современные гидротурбины.
Высокая эффективность устройств, использующих нестационарный режим обтекания крыла, позволяет создавать экономически целесообразные установки при скоростях течения 0,2 - 0,5 м/с.
Установки могут работать подо льдом.
Установки экологически чистые, т.к. отсутствуют отходы, засоряющие окружающую среду. Колебания крыла, вызванные малоскоростным потоком, имеют настолько низкий уровень шумов, что не оказывают никакого воздействия на флору и фауну.
Изобретение относится к нетрадиционной энергетике, в частности может быть использовано как источник электрической, тепловой и механической энергии в гидро- и ветроустановках. Технический результат, заключающийся в значительном повышении эффективности преобразования кинетической энергии текучей среды в другие виды энергии за счет использования оптимального закона движения крыла с углами атаки выше "критических", достигается в способе тем, что в текучую среду помещают крыло, которое устанавливают под углом атаки к направлению движения потока текучей среды, в результате чего крыло под действием гидродинамических сил, действующих на него, получает механическое перемещение в направлении поперек направлению движения потока текучей среды, а для изменения направления перемещения крыла установленный угол атаки крыла изменяют на противоположный, при поступательном перемещении крыла установленный угол атаки выдерживают постоянным, путем изменения угла между хордой крыла и направлением движения потока текучей среды, а в установке достигается тем, что она содержит неподвижную опору, подвижно связанную с балкой, на которой шарнирно закреплено по меньшей мере одно крыло, снабженное устройством установки угла атаки, выполненным в виде крыловидного элемента, снабженного собственным приводом для управления его угловым положением относительно крыла, причем балка связана с преобразователем возвратно-поступательного перемещения крыла в другие виды энергии, ось шарнирного соединения, связывающего балку и крыло, расположена на расстоянии примерно от 0 до 1/3 хорды крыла, а сам крыловидный элемент расположен вне области обтекания крыла потоком текучей среды. 2 с. и 14 з.п. ф-лы, 7 ил.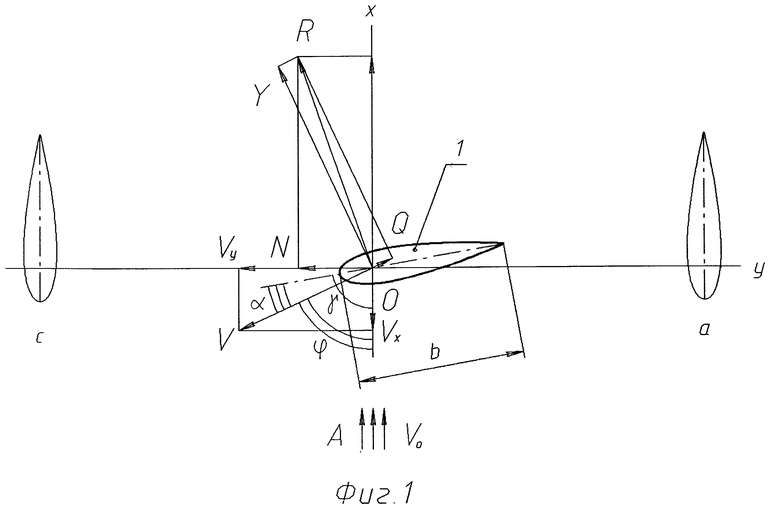
| US 4595336 A, 17.06.86 | |||
| Способ регулирования быстроходных ветродвигателей поворотом лопастей | 1947 |
|
SU74666A1 |
| Ветроколесо | 1985 |
|
SU1281740A1 |
| Способ регулирования оборотов небольших быстроходных ветровых колес (z = 3 - 6) | 1961 |
|
SU150065A1 |
| ГОРИЗОНТАЛЬНЫЙ ВЕТРЯНОЙ ДВИГАТЕЛЬ С ЛОПАСТЯМИ, ПОВОРАЧИВАЕМЫМИ КУЛАЧНЫМ ДИСКОМ | 1926 |
|
SU4497A1 |
| Ветродвигатель | 1986 |
|
SU1437567A1 |
| ВЕТРЯНАЯ ТУРБИНА | 1926 |
|
SU8862A1 |
| US 4470770 A, 11.09.84 | |||
| DE 4000092 A1, 04.07.91 | |||
| US 3469633 A, 30.09.69. | |||

