Изобретение относится к области машиностроения и может быть использовано при производстве колесных транспортных машин.
Известны дифференциалы с роликовыми муфтами свободного хода (см. Осенчуков В.В., Фрумкин А.К. Учебник для студентов вузов по специальности «Автомобили и автомобильное хозяйство» - М. Машиностроение, 1989 г., с.155).
Указанные дифференциалы автоматически обеспечивают возможность вращения любого из двух выходных валов с угловой скоростью, отличной от угловой скорости другого. При этом детали дифференциала не нагружаются дополнительным моментом трения, как в дифференциалах с повышенным внутренним трением. Применение таких дифференциалов на ведущих мостах колесных машин существенно повышает их проходимость. Однако из-за недостаточной долговечности роликовых муфт такие дифференциалы имеют ограниченные сферы применения.
Известен дифференциал с муфтой свободного хода кулачкового типа (см. Осенчуков В.В., Фрумкин А.К. Учебник для студентов вузов по специальности «Автомобили и автомобильное хозяйство» - М.: Машиностроение, 1989 г., с.156, рис.124), состоящий из силовых элементов, передающих момент от корпуса дифференциала на выходные валы (кулачковые муфты с зубьями прямоугольного профиля), устройства для размыкания кинематической связи между корпусом дифференциала и выходными валами (кулачковые муфты с трапециевидным профилем) и стопорящего устройства, обеспечивающего стопорение ведомых полумуфт в разомкнутом состоянии при их вращении с большей угловой скоростью и замыкание кинематической связи при выравнивании угловых скоростей полумуфт.
В указанном дифференциале разъединение кинематической связи (а затем ее соединение) производится путем перемещения ведомой полумуфты, через которую передается момент на выходной вал. Это вызывает при замыкании и размыкании кинематической связи динамические нагрузки в деталях трансмиссии, что снижает надежность и долговечность работы дифференциала.
Техническим результатом от использования изобретения является повышение надежности дифференциала.
Технический результат от использования изобретения достигается за счет того, что в дифференциале, содержащем силовые элементы, передающие момент от корпуса дифференциала на выходные валы, устройства для замыкания и размыкания кинематической связи между корпусом дифференциала и выходными валами и стопорящие устройства, в качестве силовых элементов используются червяки и червячные колеса, образующие самотормозящие червячные пары, в качестве устройств для замыкания и размыкания кинематической связи между корпусом дифференциала и выходными валами используются управляемые шестеренные привода червяков от червячных колес, имеющие одинаковое с передаточными парами передаточное отношение.
Дифференциал с использованием в качестве силовых элементов самотормозящую червячную пару, а в качестве устройства, для размыкания и замыкания кинематической связи между корпусом дифференциала и выходным валом, управляемый шестеренный привод имеет значительно меньшие динамические нагрузки, так как при размыкании кинематической связи взаимное положение червяка и червячного колеса меняется в пределах зазора их зубчатого зацепления.
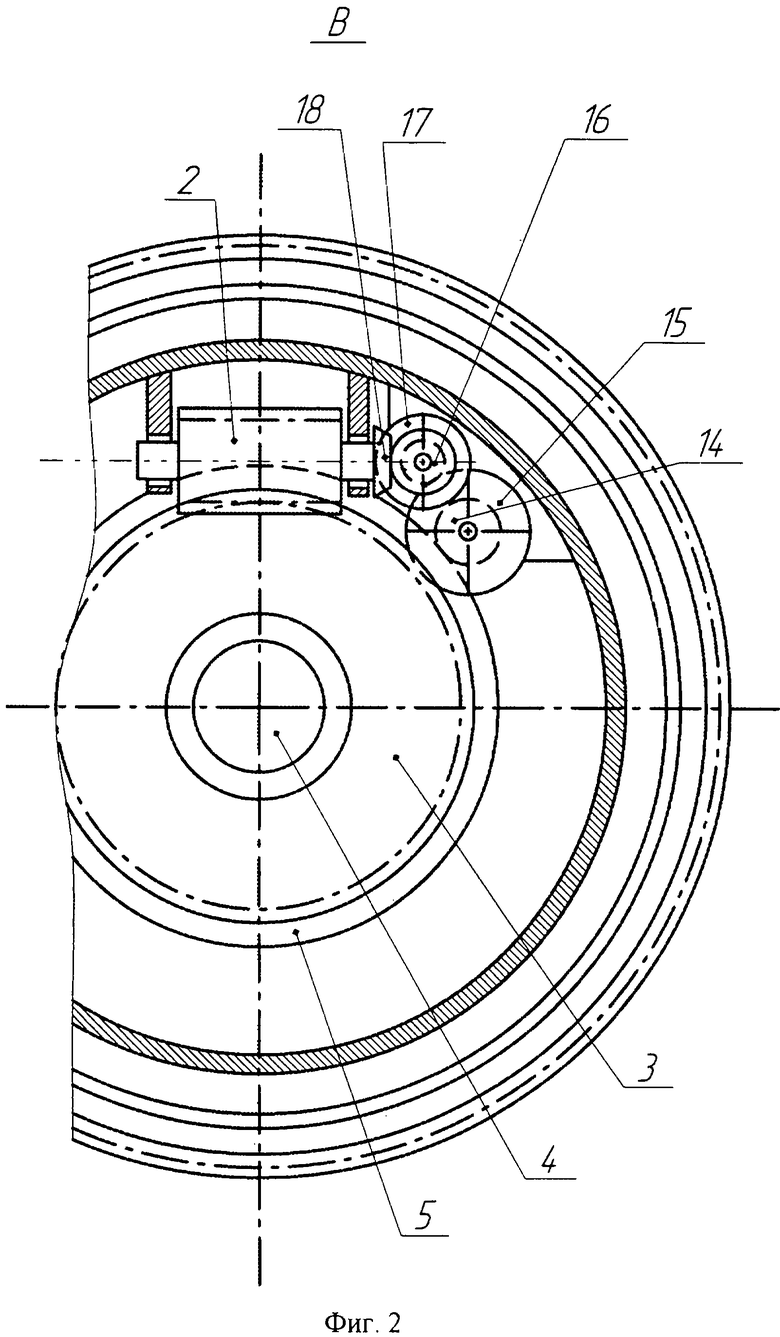
Сущность предлагаемого технического решения поясняется чертежами (Фиг.1 - общий вид дифференциала с видом А и разрезом Б-Б, фиг.2 - вид В на фиг.1). Дифференциал имеет сборный корпус 1, с закрепленными в нем на подшипниках с червяками 2. Червячные колеса 3 неподвижно крепятся на выходных валах 4 и входят в зацепление с червяками 2. На ступице червячных колес на подшипниках установлены ведущие шестерни 5 привода червяков. На шлицах выходных валов установлены зубчатые муфты 6, которые постоянно поджимаются к центру дифференциала пружинами 7. Диски 8 крепятся на концах выходных валов и имеют в своих ступицах штифты 9, которые при осевом перемещении дисков скользят по пазам выходных валов 10, имеющих скосы 11. Диски 8 имеют боковые кулачки трапециевидного профиля, которые зацепляются с кулачками кольца 12. Кольцо 12 крепится в пространстве между частями корпуса 1 и имеет возможность поворачиваться относительно оси выходных валов. К корпусу 1 крепятся тормозки 13, которые прижимаются пружинами к ободам дисков 8. Ведущие шестерни 5 кинетически связаны с червяками через цилиндрические шестерни 14, 15, 16 и конические шестерни 17, 18. Валы шестерен 14, 15, 16, 17 размещены в кронштейнах корпуса дифференциала, шестерня 18 закреплена неподвижно на валу червяка. Корпус дифференциала вращается на подшипниках 19 и приводится через шестерню 20.
Поскольку передаточное отношение шестеренного привода и червячной пары равны, то при вращении червячного колеса с включенным шестеренным приводом червяк обкатывается по его зубьям и не препятствует вращению колеса.
Дифференциал работает следующим образом. При вращении корпуса 1 дифференциала витки червяков 2 после выбора зазора в зацеплении упираются в зубья червячных колес 3 и начинают их вращать. Поворачивание червяка 2 не происходит, так как червячная пара самотормозящая. Все детали дифференциала в этом случае вращаются относительно оси выходных валов 4 с одной угловой скоростью. При увеличении скорости вращения одного из валов (направляющего правого) вместе с ним увеличивается скорость правого диска 8. Кольцо 12 находится в зацеплении с левым диском 8 и вращается с угловой скоростью корпуса дифференциала. Благодаря трапециевидному профилю кулачков рассогласование скоростей вращения правого диска 8 и кольца 12 приводит к смещению диска, а вместе с ним и правой зубчатой муфты 6 в сторону ведущей шестерни 5 привода червяка 2. В результате этого происходит замыкание через венец внутреннего зацепления ведущей шестерни с выходным валом. Благодаря наличию тормозка 13 на диск при его вращении относительно корпуса действует тангенциальная сила, в результате которой штифт 9 заходит за скос 11 паза 10 и удерживает диск, а вместе с ним зубчатую муфту 6 от возвращения их в исходное состояние под действием пружины 7. Вращение от вала через привод передается на червяк 2. Поскольку передаточное отношение привода и червячной пары равны, то при вращении червячного колеса червяк обкатывается по его зубьям и не препятствует вращению червячного колеса с большей угловой скоростью, чем угловая скорость корпуса дифференциала. При выравнивании частот вращения правого выходного вала и корпуса дифференциала тангенциальная сила от действия тормозка 13 на обод диска 8 исчезает, следовательно, исчезает сила, удерживающая штифт 9 на скосе 11. Под действием пружины 7 зубчатая муфта 6 и диск 8 передвигаются к центру дифференциала. Венец зубчатой муфты размыкается с внутренним венцом ведущей шестерни 5 привода, а кулачки диска 8 замыкаются с кулачками кольца 12. Червяк 2 перестает вращаться, упирается в зубья червячного колеса 3 и передает ему момент от корпуса 1 дифференциала.
По условию работы предлагаемого дифференциала включение и выключение привода червяка происходит в то время, когда его витки не передают усилия на червячное колесо (не касаются зубьев червяка). Мощность на привод червяка и усилия, действующие в приводе, в этом случае, малы и не могут создать значительные динамические нагрузки на трансмиссию.
Конструктивное исполнение стопорящих устройств и шестеренных приводов червяков может быть выполнено и по другим известным схемам.
Благодаря указанному фактору надежность предназначенного дифференциала будет выше известных дифференциалов с муфтами свободного хода.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 2007 |
|
RU2361130C1 |
| ПРИВОДНОЙ МОСТ КОЛЕСНОГО СРЕДСТВА | 1994 |
|
RU2086428C1 |
| Регулируемая передача Жунисбекова П. | 1987 |
|
SU1788365A1 |
| ЛЕБЕДКА | 2004 |
|
RU2268235C2 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1996 |
|
RU2076255C1 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2005 |
|
RU2291992C1 |
| ПРИВОД ВАЛА ОТБОРА МОЩНОСТИ ТРАКТОРА С РЕГУЛИРУЕМОЙ ЧАСТОТОЙ ВРАЩЕНИЯ | 1993 |
|
RU2080035C1 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2004 |
|
RU2276298C1 |
| ШИРОКОДИАПАЗОННАЯ РЕВЕРСИВНАЯ ТРАНСМИССИЯ | 2020 |
|
RU2729847C1 |
| Регулировочная муфта, преимущественно главной линии стана периодической прокатки | 1980 |
|
SU944694A1 |
Изобретение относится к области машиностроения и может быть использовано при производстве колесных транспортных машин. Дифференциал содержит силовые элементы, устройства для размыкания и замыкания кинематической связи между силовыми элементами и стопорящие устройства. В качестве силовых элементов используют червяки и червячные колеса, образующие самотормозящие червячные пары. В качестве устройств для размыкания и замыкания кинематической связи между силовыми элементами используют управляемые шестеренные приводы червяков от выходных валов. Шестеренные приводы имеют одинаковые передаточные отношения с червячными парами. В результате повышается надежность дифференциала. 2 ил.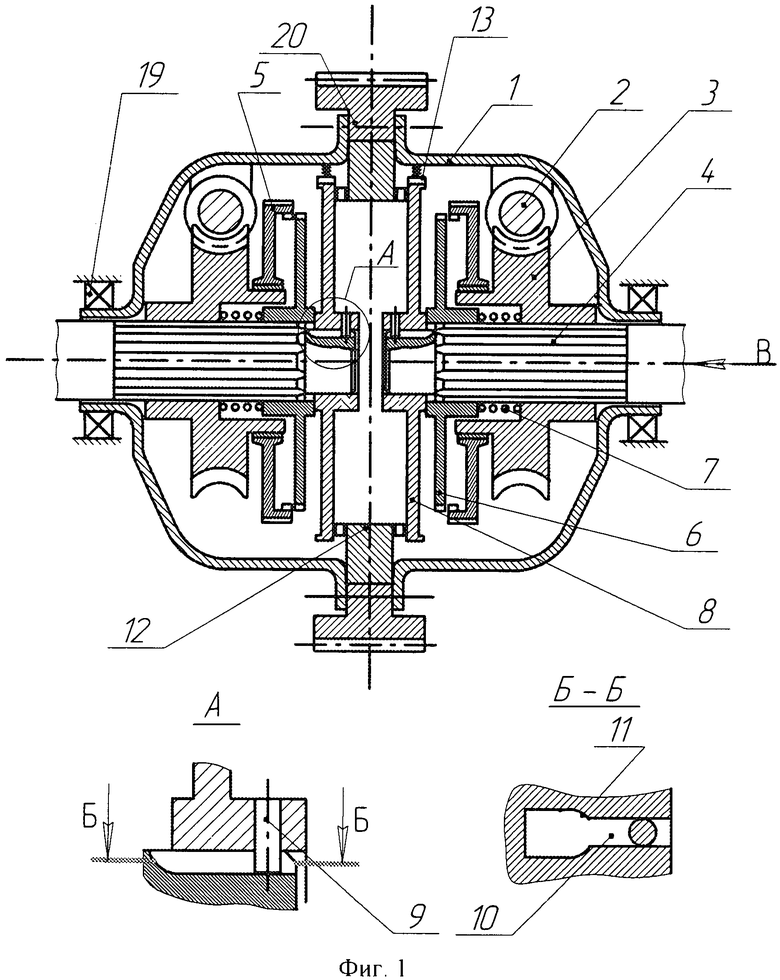
Дифференциал, содержащий силовые элементы, устройства для размыкания и замыкания кинематической связи между силовыми элементами и стопорящие устройства, отличающийся тем, что в качестве силовых элементов используют червяки и червячные колеса, образующие самотормозящие червячные пары, а в качестве устройств для размыкания и замыкания кинематической связи между силовыми элементами используют управляемые шестеренные приводы червяков от выходных валов, при этом шестеренные приводы имеют одинаковые передаточные отношения с червячными парами.
| Самоблокирующийся дифференциал транспортного средства | 1990 |
|
SU1705144A1 |
| Червячный редуктор | 1980 |
|
SU937857A1 |
| АВТОМОБИЛЬ С КОРОБКОЙ ПЕРЕДАЧ | 2001 |
|
RU2272202C2 |
| DE 19822666 A1, 03.12.1998. | |||

