Изобретение относится к области двигателестроения, а именно к двигателям внутреннего сгорания.
Известен способ управления четырехтактным двигателем с возвратно-поступательно перемещающимся поршнем (рабочим органом) (см. А.С.Орлин, М.Г.Круглов, Двигатели внутреннего сгорания. Устройство и работа поршневых двигателей. - М.: Машиностроение, 1980, с.19-23). В известном двигателе управление осуществляется только путем изменения количества сжигаемого топлива (при относительно неизменном составе смеси или переменном), приводящего к соответствующему изменению частоты вращения вала двигателя в зависимости от нагрузки.
Недостатками известного способа являются ограниченные значения литровой мощности вследствие действия пиковых значений нагрузок на подшипники вала в мертвых точках.
Так, при форсировании двигателя по частоте вращения вала на его подшипники будет действовать возросшая сила инерции при положении поршня в конце расширения, в конце выпуска и в конце впуска. Подшипники разгружаются только при рабочем ходе поршня во время встречного действия газовой и инерционной сил.
При форсировании двигателя по рабочему процессу неизбежное увеличение массы поршня и шатуна также приведет к увеличению инерционных нагрузок на подшипники. При этом использование двухстороннего рабочего процесса в четырехтактном двигателе только усугубляет отмеченные выше проблемы в силу увеличения соответствующей суммарной массы.
Известен способ управления двухтактным двигателем с возвратно-поступательно перемещающимся поршнем при одностороннем рабочем процессе (см. указанный выше А.С.Орлин, М.Г.Круглов, с.24-28).
При проведении двухтактного одностороннего рабочего процесса остается только одно положение поршня, при котором на подшипники действует пиковая инерционная нагрузка - положение в нижней мертвой точке. Но полностью проблема перегрузки подшипников вала не решена.
Известен способ компоновки свободнопоршневого двигателя внутреннего сгорания, при котором тепловая энергия не передается через механизм преобразования, а направляется с продуктами сгорания на расширительную машину. Известно, что на установившемся режиме работы свободнопоршневого двигателя используют баланс сил газовой, инерционной и силы сопротивления в буферной или компрессорной полостях.
Наиболее близким техническим решением к заявленному является способ управления двухтактным двигателем с двухсторонним рабочим процессом, осуществляемым в противоположный рабочих камерах, при этом поршни объединены в единый модуль и связаны с кривошипным валом (см. патент РФ №2101511 С1, опубл. 10.01.1998).
Недостатком известного технического решения является отсутствие действий, направленных на оптимизацию нагрузок на подшипники вала.
Техническим результатом заявленного изобретения является увеличение литровой мощности теплового двигателя при обеспечении приемлемого ресурса.
Поставленная задача достигается тем, что реализуют способ управления двухтактным двигателем, который содержит, по меньшей мере, два оппозитных рабочих цилиндра с головками, в каждом из которых установлен подвижный рабочий элемент с образованием рабочей камеры переменного объема, единый кинематический модуль, выполненный в виде двух опорных элементов, расположенных соосно и соединенных между собой при помощи тяг, при этом каждый рабочий элемент связан с одним из опорных элементов при помощи шарнира, единый кинематический модуль при помощи, по меньшей мере, одного суммирующего звена механизма преобразования, связан с выходным валом, а в каждой рабочей камере организуют двухтактный рабочий процесс с поочередным проведением рабочих тактов с равными промежутками между рабочим тактом в одном цилиндре и рабочим тактом в другом цилиндре и с обеспечением противоположной направленности газовых сил, действующих на рабочие элементы, и инерционной силы от возвратно-поступательно движущихся масс, по меньшей мере, рабочих и опорных элементов, единого кинематического модуля и суммирующего звена, по меньшей мере, при их положении в каждой мертвой точке, заключающийся в том, что определяют величины максимальной газовой силы и максимальной инерционной силы на каждом режиме, а также разность указанных величин, и не допускают превышения разности величин газовой и инерционной сил величины допустимой нагрузки, по меньшей мере, подшипника, воспринимающего суммарную нагрузку в механизме преобразования.
Поставленная задача достигается также тем, что могут задавать величины газовой и инерционной сил путем установления, по меньшей мере, степени сжатия и частоты вращения вала.
Поставленная задача достигается также тем, что величины газовой и инерционной сил могут сравнивать на каждом рабочем режиме работы двигателя и задавать величины указанных сил путем их раздельного или одновременного изменения.
Поставленная задача достигается также тем, что разность величин газовой и инерционной сил могут изменять путем регулирования степени наддува.
Поставленная задача достигается также тем, что разность величин газовой и инерционной сил могут изменять путем регулирования состава топливовоздушной смеси.
Поставленная задача достигается также тем, что разность величин газовой и инерционной сил могут изменять путем регулирования степени сжатия.
Поставленная задача достигается также тем, что опорные элементы могут быть установлены с возможностью передачи реактивного момента на корпус двигателя.
Поставленная задача достигается также тем, что двигатель снабжают идентичным комплектом цилиндров и поршней с кинематическим модулем, перемещение которого направлено под углом к перемещению первого модуля, при этом дополнительный модуль связывают с выходным валом посредством суммирующего звена первого модуля.
Поставленная задача достигается также тем, что суммирующее звено механизма могут устанавливать на кривошипе выходного вала посредством подшипника, воспринимающего суммарную нагрузку в механизме преобразования.
Поставленная задача достигается также тем, что суммирующее звено механизма могут соединять с кривошипом посредством рычага.
Поставленная задача достигается также тем, что шарнирную связь поршней с кинематическим модулем могут осуществлять с возможностью самоустановки каждого поршня относительно внутренней поверхности цилиндра, например, с помощью сферического и плоского шарниров.
Предлагаемое изобретение поясняется при помощи чертежей.
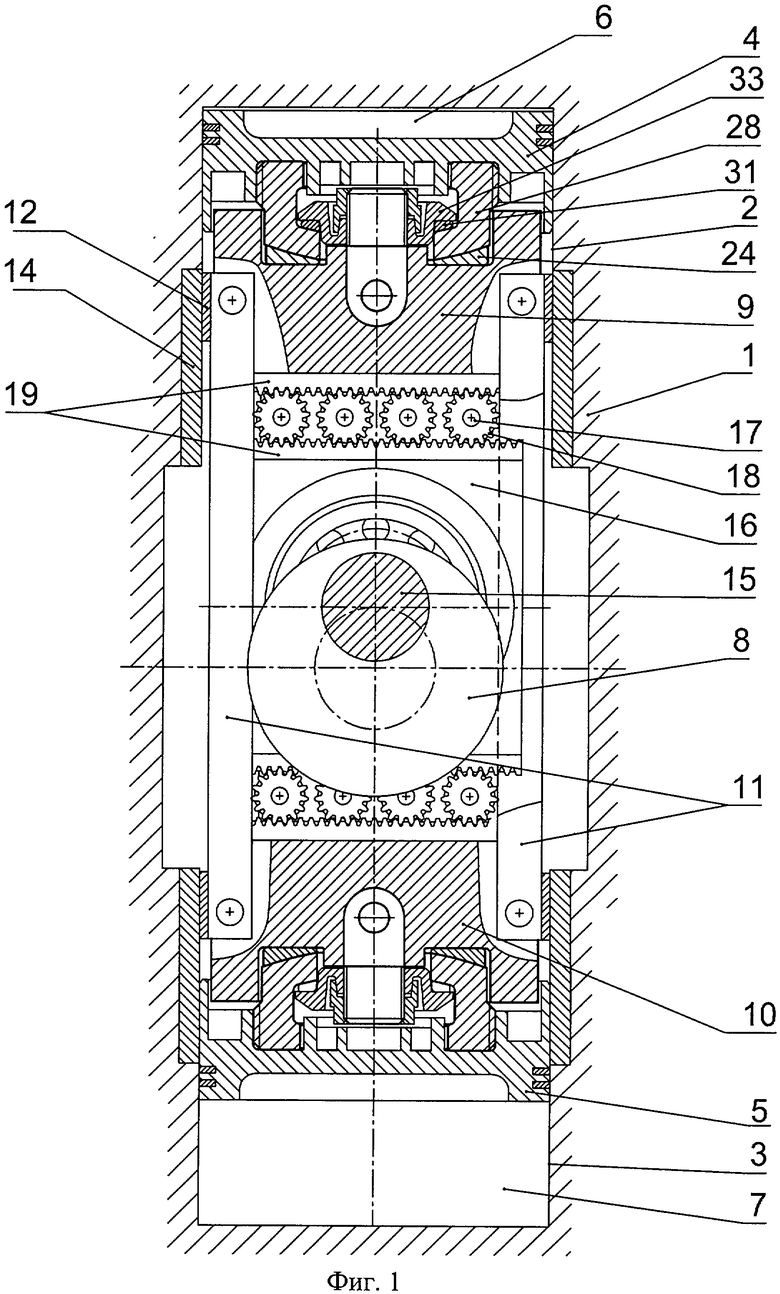
На фиг.1 показана схема двигателя с кривошипно-кулисным механизмом, в которой реализуется заявленный способ управления;
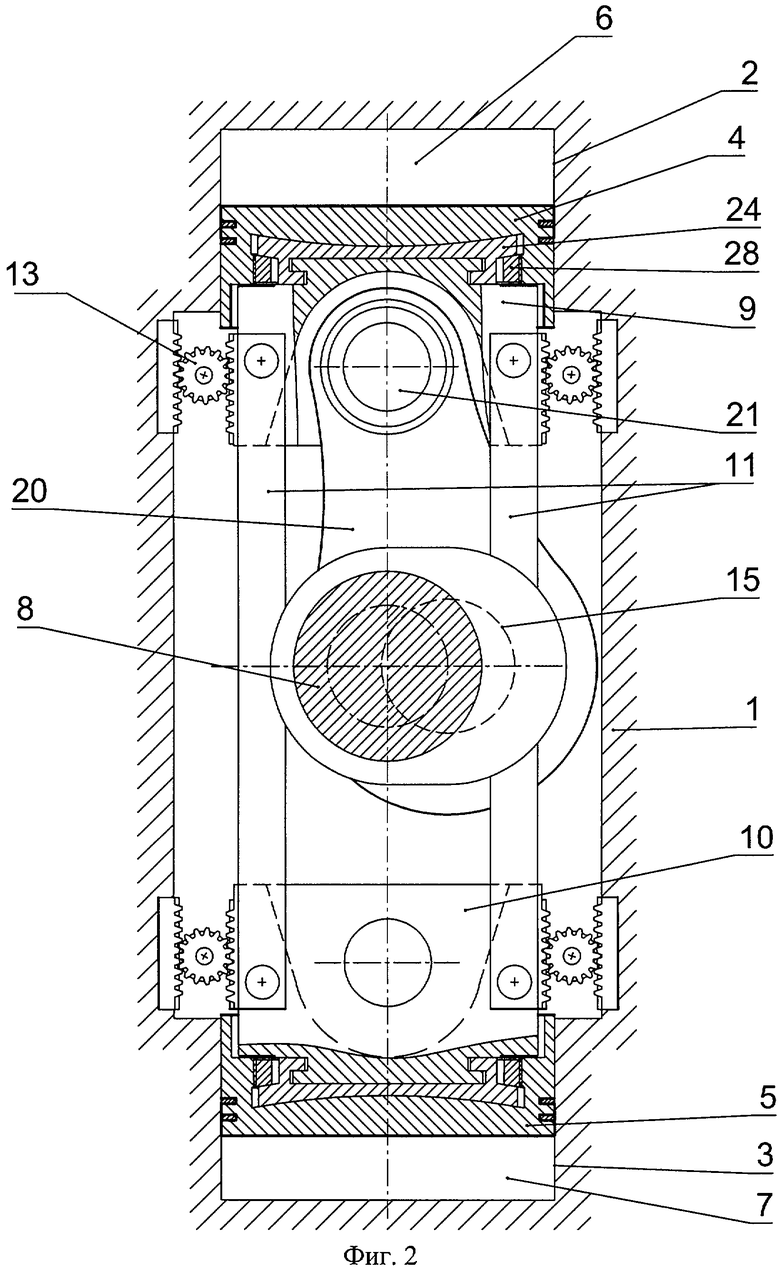
на фиг.2 - вариант компоновки двигателя с кривошипно-шатунным механизмом;
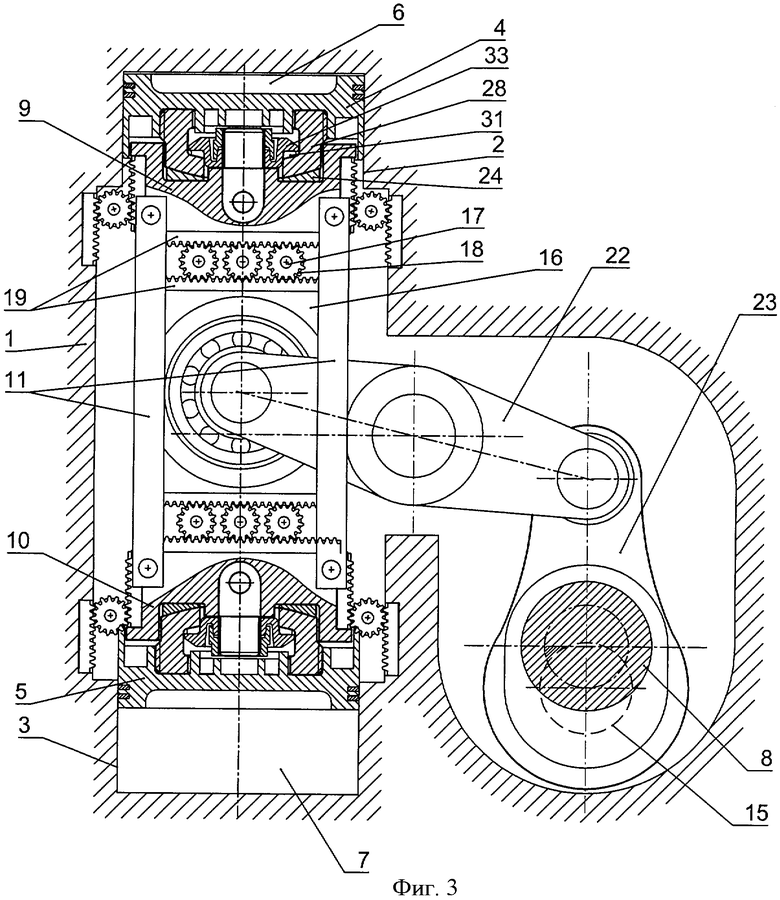
на фиг.3 - вариант компоновки двигателя с рычажным механизмом;
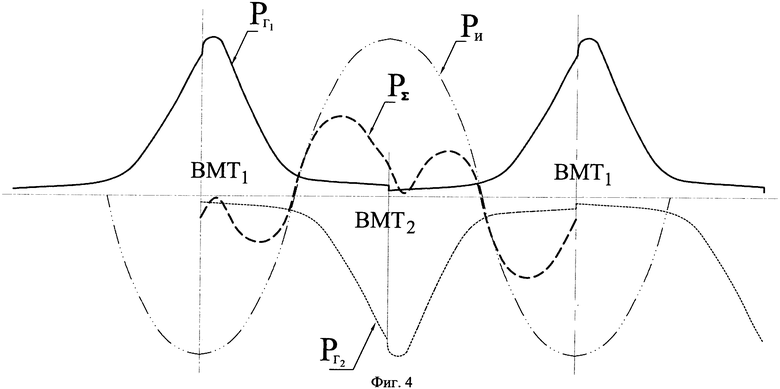
на фиг.4 представлен график зависимости газовых сил, силы инерции и суммарной силы от угла поворота вала:
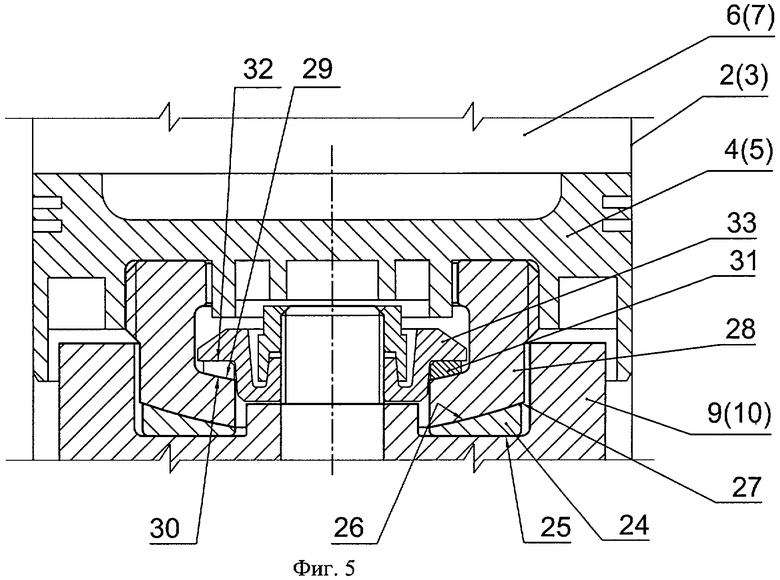
на фиг.5 представлен разрез двигателя с вариантом выполнения шарнирного узла связи поршней с единым кинематическим модулем;
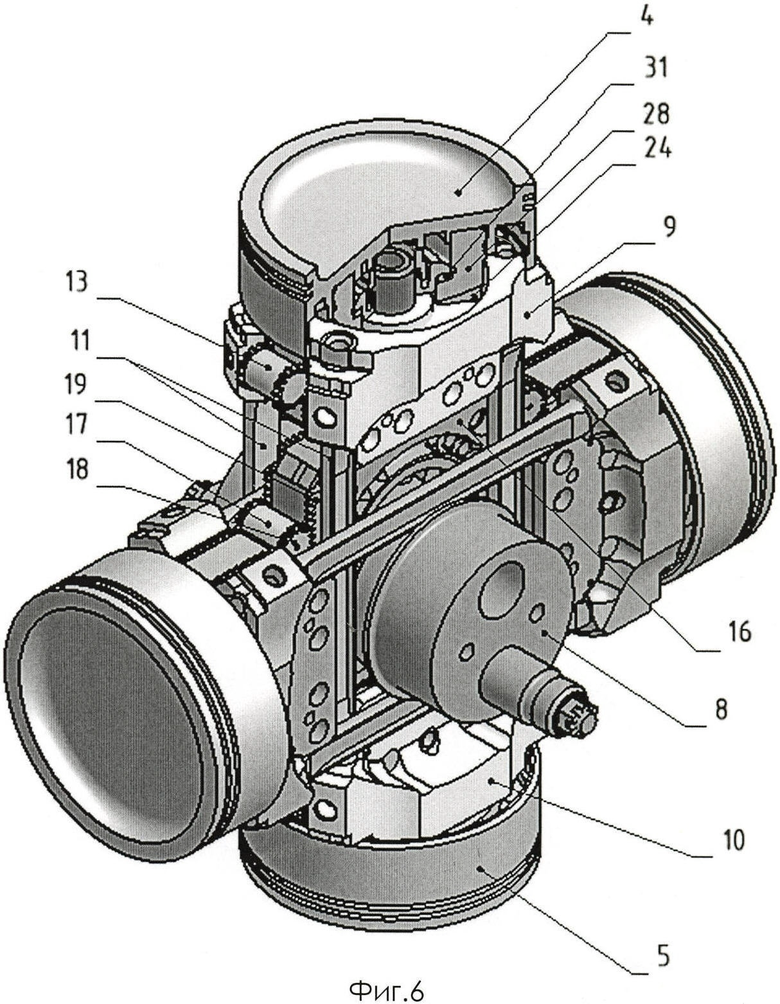
на фиг.6 показан вариант компоновки двигателя с кривошипно-кулисным механизмом и вторым единым кинематическим, модулем, связанным с общим кулисным камнем.
Способ управления реализуется в двухтактном двигателе, содержащем корпус 1, установленные в нем цилиндры 2 и 3, в которых размещены поршни (рабочие элементы), соответственно, 4 и 5 с образованием рабочих камер 6 и 7. Механизм преобразования возвратно-поступательного движения поршней во вращение вала 8 включает единый кинематический модуль, содержащий, в одном из вариантов выполнения, каретки (опорные элементы) 9 и 10, жестко соединенные между собой при помощи тяг 11 с образованием жесткой конструкции, воспринимающей реактивный момент и передающей его на корпус 1. Реактивный момент может передаваться на корпус как при помощи ползунов 12 с поверхностями скольжения, так и при помощи катков 13. Ползуны 12 могут контактировать с поверхностью цилиндров 2 и 3, передающих нагрузку от реактивного момента на корпус 1, либо с ответными поверхностями скольжения 14, закрепленными непосредственно на корпусе 1.
Преобразование движения единого кинематического модуля во вращение вала 8 осуществляется посредством связанного с модулем суммирующего звена, установленного на кривошипе 15 вала 8 посредством подшипника.
Суммирующее звено может быть выполнено в виде кулисного камня 16, взаимодействующего с поверхностями кулисы, функции которой выполняют каретки 9 и 10. При этом взаимодействие кулисы с кулисным камнем может осуществляться как с непосредственным контактом взаимодействующих поверхностей с трением скольжения, так и посредством катков 17. Катки 17 для предотвращения проскальзывания относительно поверхностей могут быть снабжены синхронизирующими шестернями 18, зацепленными с рейками 19 как кулисного камня 16, так и кулисы.
Суммирующее звено может быть выполнено и в виде шатуна 20, одна головка которого связанна с кривошипом 15, а другая посредством пальца 21 - с единым кинематическим модулем.
Связь единого кинематического модуля с валом 8 может осуществляться при помощи рычага 22, одно плечо которого соединено с суммирующим звеном (кулисным камнем 16 или шатуном 20), а другое - с кривошипом 15, например, при помощи дополнительного шатуна 23.
Связь поршней 4 и 5 с единым кинематическим модулем осуществляется при помощи шарниров, позволяющих самоустанавливаться поршням 4 и 5 относительно цилиндров, соответственно, 2 и 3. Шарниры должны обеспечивать как угловое качание поршней 4 и 5 относительно единого кинематического модуля, так и плоскопараллельное их перемещение относительно продольной оси цилиндров 2 и 3 в поперечной и продольной плоскостях двигателя.
Шарнирный узел связи поршня 4 и 5 с единым кинематическим модулем может быть выполнен в виде кольцевой пяты 24, одна кольцевая поверхность 25 которой выполнена плоской, а противоположная кольцевая поверхность 26 - сферической. С поверхностью 26 контактирует сферическая поверхность 27 кольцевого опорного элемента 28. Противоположная поверхность 29 элемента 28 также выполнена сферической, центр сферы которой совпадает с центром сферы поверхности 27. Сферическая поверхность 30 сферического сегмента 31 контактирует со сферической поверхностью 29 элемента 28. Противоположная поверхность 32 сегмента 31 выполнена плоской, а замыкающий элемент 33 шарнирного узла своей плоской поверхностью контактирует с плоской поверхностью 32 сегмента 31.
Опорный элемент 28 соединен с поршнем 4 или 5, например, при помощи резьбового соединения. Замыкающий элемент 33 соединен с кареткой 9 или 10, также при помощи резьбового соединения.
Такое выполнение шарнирного узла позволяет перемещаться поршню относительно каретки (единого кинематического модуля) плоскопараллельно вдоль плоских поверхностей 25 и 32, компенсируя непараллельность оси цилиндра и направления перемещения единого кинематического модуля. Угловое перемещение поршня относительно сферических поверхностей 26-27 и 29-30 позволяет компенсировать неточности установки цилиндров 2 и 3 на корпусе 1.
Заявленное изобретение работает следующим образом. В рабочих камерах 6 и 7 поочередно, в данном примере через 180° поворота вала 8, осуществляют двухтактный рабочий процесс. На фиг.4 показана зависимость газовых сил Рг1 и Рг2 по углу поворота вала 8, действующих, соответственно, в камерах 6 и 7. На этом же графике показана зависимость инерционной силы Ри от возвратно-поступательно перемещающихся масс. Из графика следует, что газовые силы Рг1 и Рг2 в двухтактном двигателе с двухсторонним рабочим процессом действуют всегда в противофазе с инерционной силой Ри.
Известно, что наиболее слабым звеном в кинематике двигателей известного уровня техники является шатунный (кривошипный) подшипник, посредством которого нижняя головка шатуна 20 (или кулисный камень 16) сопряжена с кривошипом 15. В описываемой схеме механизма кривошипный подшипник воспринимает суммарную нагрузку.
В описываемом способе управления суммарная нагрузка Ps от сил Рг1 и Рг2 и Ри, действующая на кривошипный подшипник, усредняется за счет складывания всегда взаимно противоположно направленных сил инерции и газовых сил.
При осмысленном подходе к заданию как газовых, так и инерционных сил, действующих на детали двигателя, возможно ослабление пиковых нагрузок, в частности в кривошипном подшипнике, до значений, близких к условной силе от среднего эффективного давления Ре.
Значение средней силы в несколько раз меньше пиковых значений газовых или инерционных сил, что позволяет в несколько раз увеличить литровую мощность базового двигателя с сохранением приемлемого его ресурса.
Верхний предел значения суммарной нагрузки Р∑ при работе двигателя на заданной частоте вращения вала определяется значением инерционной силы Ри. При этом Ри превышает Рг на величину допустимой нагрузки на подшипник. Нижний предел суммарной нагрузки Р∑ при той же Рг определяется значением Ри, которая снижается до значения, меньшего значения Рг также на величину допустимой нагрузки на подшипник.
Регулируя двигатель на каждом расчетном режиме с учетом соотношений величин газовой и инерционной нагрузок добиваются максимально возможной литровой мощности при заданном значении ресурса двигателя. При этом в качестве инструментов регулирования используют, кроме классических методов (дросселирование и качественный состав топливовоздушной смеси), изменение степени сжатия, степени наддува и т.п.
Что касается ресурса цилиндропоршневой группы, то введение шарнирной связи поршня с единым кинематическим модулем позволяет отказаться от пути повышения жесткости цилиндров. Большая жесткость необходима в известном уровне техники для обеспечения требуемого взаимного расположения контактирующих поверхностей элементов, в частности расположения поршня и поверхности цилиндра в продольной плоскости двигателя. Жесткость цилиндров в известном уровне техники достигается в основном за счет объединения всех цилиндров в единый блок, а также за счет увеличения толщины стенок корпусных деталей.
Использование указанной выше шарнирной связи позволяет выполнять каждый цилиндр в виде отдельного модуля, что значительно упрощает не только изготовление, но и ремонт двигателя. Замена всего цилиндра занимает незначительное время, а его расточка не требует специализированного оборудования.
Кроме того, передача реактивного момента на корпус 1 деталями единого кинематического модуля (каретками 9 и 10), а не поршнями 4 и 5 позволяет разгрузить детали цилиндропоршневой группы от действия боковой силы. Это позволяет избежать деформаций как цилиндров, так и поршней и значительно улучшить уплотнение рабочих камер 6 и 7, что также косвенно влияет на температурную напряженность деталей всей группы. Предотвращается износ цилиндропоршневой группы в поперечной плоскости двигателя, а значит увеличивается ее ресурс.
Таким образом, использование заявленного изобретения позволяет значительно увеличить литровую мощность двигателя внутреннего сгорания при заданном ресурсе механизма, определяемом величиной износа подшипников. При этом ресурс цилиндропоршневой группы уже не является фактором, определяющим назначенный ресурс двигателя. Дальнейшее развитие заявленного способа позволит вообще отказаться от контактных уплотнений цилиндра в целом или частично. Этому решению могут способствовать такие факторы, как меньшее время действия уплотнения за цикл (увеличенная частота вращения вала) и возможность самоустановки поршня (равномерный кольцевой зазор, оптимальный для действия лабиринтного уплотнения).
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНО-КУЛИСНАЯ ПОРШНЕВАЯ МАШИНА | 2008 |
|
RU2378514C1 |
| ПОРШНЕВАЯ МАШИНА | 2008 |
|
RU2387853C1 |
| КРИВОШИПНО-КУЛИСНЫЙ МЕХАНИЗМ | 2008 |
|
RU2390672C1 |
| Двигатель внутреннего сгорания | 2021 |
|
RU2776228C1 |
| Золотниковая гильза распределения | 2018 |
|
RU2700117C1 |
| ШАРНИРНЫЙ УЗЕЛ ПОРШНЕВОЙ МАШИНЫ | 2014 |
|
RU2581751C1 |
| СПОСОБ РАБОТЫ ДВУХТАКТНОГО ДВИГАТЕЛЯ С ПРИНУДИТЕЛЬНЫМ НАПОЛНЕНИЕМ ЦИЛИНДРА | 2008 |
|
RU2387849C1 |
| ЦИЛИНДРОПОРШНЕВАЯ ГРУППА ДВУХТАКТНОГО ДВИГАТЕЛЯ | 2020 |
|
RU2753076C1 |
| СПОСОБ РАБОТЫ ДВУХТАКТНОГО ДВИГАТЕЛЯ И ДВУХТАКТНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2103524C1 |
| Шарнирный узел поршневой машины | 2020 |
|
RU2753078C1 |
Изобретение относится к области двигателестроения, а именно к двигателям внутреннего сгорания, к их регулированию. Сущность способа заключается в том, что, по меньшей мере, в двух рабочих цилиндрах устанавливают по одному поршню с образованием рабочей камеры в каждом цилиндре. Поршни посредством шарниров соединяют с единым кинематическим модулем, который при помощи, по меньшей мере, одного суммирующего звена механизма, связан с выходным валом. В каждой рабочей камере организуют двухтактный рабочий процесс с поочередным проведением рабочих тактов с равными промежутками между ними и с обеспечением противоположной направленности газовых сил, действующих на днище поршня, и инерционных сил от возвратно-поступательно движущихся масс при положении в каждой мертвой точке. Определяют величины максимальной газовой силы и максимальной инерционной силы на каждом режиме и не допускают превышения разности величин газовой и инерционной сил значения допустимой нагрузки подшипника, воспринимающего суммарную нагрузку от кинематического модуля. Техническим результатом является увеличение литровой мощности теплового двигателя при обеспечении приемлемого ресурса 10 з.п. ф-лы, 6 ил.
1. Способ управления двухтактным двигателем, который содержит, по меньшей мере, два оппозитных рабочих цилиндра с головками, в каждом из которых установлен подвижный рабочий элемент с образованием рабочей камеры переменного объема, единый кинематический модуль, выполненный в виде двух опорных элементов, расположенных соосно и соединенных между собой при помощи тяг, при этом каждый рабочий элемент связан с одним из опорных элементов при помощи шарнира, единый кинематический модуль при помощи, по меньшей мере, одного суммирующего звена механизма преобразования, связан с выходным валом, а в каждой рабочей камере организуют двухтактный рабочий процесс с поочередным проведением рабочих тактов с равными промежутками между рабочим тактом в одном цилиндре и рабочим тактом в другом цилиндре и с обеспечением противоположной направленности газовых сил, действующих на рабочие элементы, и инерционной силы от возвратно-поступательно движущихся масс, по меньшей мере, рабочих и опорных элементов, единого кинематического модуля и суммирующего звена, по меньшей мере, при их положении в каждой мертвой точке, заключающийся в том, что определяют величины максимальной газовой силы и максимальной инерционной силы на каждом режиме, а также разность указанных величин, и не допускают превышения разности величин газовой и инерционной сил величины допустимой нагрузки, по меньшей мере, подшипника, воспринимающего суммарную нагрузку в механизме преобразования.
2. Способ по п.1, отличающийся тем, что задают величины газовой и инерционной сил путем установления, по меньшей мере, степени сжатия и частоты вращения вала.
3. Способ по п.1, отличающийся тем, что задают величины газовой и инерционной сил путем их раздельного или одновременного изменения.
4. Способ по п.3, отличающийся тем, что разность величин газовой и инерционной сил изменяют путем регулирования степени наддува.
5. Способ по п.3, отличающийся тем, что разность величин газовой и инерционной сил изменяют путем регулирования состава топливовоздушной смеси.
6. Способ по п.3, отличающийся тем, что разность величин газовой и инерционной сил изменяют путем регулирования степени сжатия.
7. Способ по п.1, отличающийся тем, что опорные элементы установлены с возможностью передачи реактивного момента на корпус двигателя.
8. Способ по п.1, отличающийся тем, что двигатель снабжают идентичным комплектом цилиндров и поршней с единым кинематическим модулем, перемещение которого направлено под углом к перемещению первого модуля, при этом дополнительный модуль связывают с выходным валом посредством суммирующего звена первого модуля.
9. Способ по п.1, отличающийся тем, что суммирующее звено механизма преобразования устанавливают на кривошипе выходного вала посредством подшипника, воспринимающего суммарную нагрузку в механизме преобразования.
10. Способ по п.1, отличающийся тем, что суммирующее звено механизма соединяют с кривошипом посредством рычага.
11. Способ по п.1, отличающийся тем, что шарнирную связь рабочих элементов с единым кинематическим модулем осуществляют с возможностью самоустановки каждого рабочего элемента относительно внутренней поверхности цилиндра, например, с помощью сферического и плоского шарниров.
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ И НАОБОРОТ И УСТРОЙСТВО С ВОЗВРАТНО-ПОСТУПАТЕЛЬНО ДВИЖУЩИМИСЯ ЧАСТЯМИ | 1992 |
|
RU2101511C1 |
| OPЛИН А.С., КРУГЛОВ М.Г | |||
| Устройство и работа поршневых и комбинированных двигателей | |||
| - М.: Машиностроение, 1980, с.19-28 | |||
| RU 22888369 C2, 27.11.2006 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 4257365 A, 24.03.1981 | |||
| СПОСОБ В.Г.МАЛЫШЕВА ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА КРОВИ В ПОРЦИИ МОЧИ | 1991 |
|
RU2013777C1 |

