Изобретение относится к области космонавтики, а именно к обработке изображений земной поверхности и передаче полученной информации на Землю.
Из уровня техники известны, например, космический радиолокатор (см. патент Российской Федерации на изобретение №2158008, оп. 20.10.2000), способ классификации подстилающей поверхности по многоканальному изображению, заключающийся в цифровой обработке изображений (см. патент Российской Федерации на изобретение №2314565, оп. 10.01.2008), система дистанционного зондирования (см. свидетельство Российской Федерации на полезную модель №58735, оп. 27.11.2006).
Недостатками известных из уровня техники технических решений являются ограниченные функциональные возможности, низкое разрешение передаваемого изображения, а также узкая область применения.
Также из уровня техники известно устройство передачи данных изображения Земли в аналоговом формате APT, используемое в космических аппаратах (КА) NOAA POES (National Oceanic and Atmoshpheric Administration Polar Operational Environmental Satellites, США) [1].
Недостатком известного устройства передачи данных является узкая полоса радиоканала передачи и низкое разрешение передаваемого изображения.
Технический результат заявленного изобретения заключается в передаче значительно большего количества информации с более высоким разрешением.
Технический результат достигается за счет расширения полосы радиоканала, модуляции опорного аналогового сигнала цифровым сжатым сигналом и применения специальных методов кодирования и обработки исходной информации.
Технический результат достигается тем, что бортовая информационная система с радиолинией метрового диапазона волн (БИС-МВ) состоит из блока формирования цифрового потока метрового диапазона, передающего блока метрового диапазона, в состав которого входит блок четырехпозиционной фазовой манипуляции и блок усиления высокочастотного сигнала, при этом на первый информационный вход блока формирования цифрового потока метрового диапазона поступают сигналы от сканирующего устройства, на второй вход блока формирования цифрового потока метрового диапазона поступают команды управления от системы управления космического аппарата (КА), с первого выхода блока формирования цифрового потока метрового диапазона передается телеметрическая информация на КА о режимах работы блока формирования цифрового потока метрового диапазона, блока четырехпозиционной фазовой манипуляции и блока усиления высокочастотного сигнала, со второго выхода блока формирования цифрового потока метрового диапазона сигнал поступает на первый вход блока четырехпозиционной фазовой манипуляции, со второго выхода блока четырехпозиционной фазовой манипуляции сигнал поступает на первый вход блока усиления высокочастотного сигнала, с первого выхода блока усиления высокочастотного сигнала через второй вход блока четырехпозиционной фазовой манипуляции передается телеметрическая информация о режиме работы блока усиления на третий вход блока формирования цифрового потока метрового диапазона, со второго выхода блока усиления высокочастотный сигнал подается на антенно-фидерное устройство для излучения на наземные пункты приема, при этом на питающие входы блока формирования цифрового потока метрового диапазона, блока четырехпозиционной фазовой манипуляции и блока усиления высокочастотного сигнала подается напряжение питания от внешнего источника питания постоянного тока КА.
Признаки и сущность изобретения поясняется чертежами, на которых показано следующее:
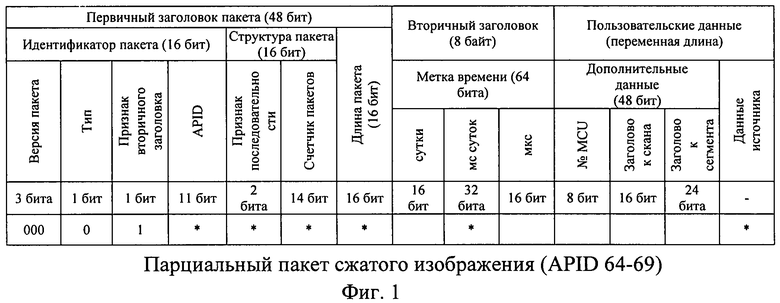
На фиг.1 представлен парциальный пакет сжатого изображения (APID 64-69) в виде таблицы.
На фиг.2 представлена структурная схема заявленной бортовой информационной системы с радиолинией метрового диапазона волн (БИС-МВ), где показано следующее:
1 - блок формирования цифрового потока метрового диапазона;
2 - передающий блок метрового диапазона;
3 - блок четырехпозиционной фазовой манипуляции;
4 - блок усиления высокочастотного сигнала.
БИС-МВ (см. фиг.2) состоит из блока формирования цифрового потока метрового диапазона (1), передающего блока метрового диапазона (2), в состав которого входят блок четырехпозиционной фазовой манипуляции (3) и блок усиления высокочастотного сигнала (4).
Блок формирования цифрового потока метрового (М) диапазона входит в состав системы БИС-МВ и предназначен для обработки команд управления системой; передачи команд на соответствующие блоки системы и формирования цифрового информационного потока в формате пакетной телеметрии из потока изображения бортового сканирующего устройства.
Передающий блок метрового диапазона (2) состоит из блока (3) четырехпозиционной фазовой манипуляции и блока (4) усиления ВЧ сигналов, входящего в состав БИС-МВ и предназначенного для передачи усиленных ВЧ сигналов с параметрами:
- несущие частоты 137,1 и 137,9 МГц;
- полоса частот сигнала 150 кГц;
- мощность от 0,5 до 3 мВт.
С выхода блока (4) сигнал поступает на антенно-фидерное устройство для излучения на наземные станции приема.
Бортовая информационная система с радиолинией метрового диапазона волн предназначена для приема высокоскоростного потока данных изображений от бортовой аппаратуры КА, выбора заданных компонентов изображения, их сжатия и передачи преобразованной информации по низкоскоростной радиолинии на наземные пункты приема информации на двух несущих частотах 137,1 и 137,9 МГц в международном формате LRPT (Low Rate Picture Transmission) [2].
Бортовая информационная система с радиолинией метрового диапазона волн получает изображение Земли от сканирующего устройства, например многоканального сканирующего устройства малого разрешения (МСУ-МР), которое производит сканирование подстилающей поверхности в шести спектральных зонах, передаваемое по отдельным каналам.
МСУ-МР передает одну строку сканирования по всем спектральным каналам с частотой 6,5 Гц, включая калибровочные данные. Строка изображения состоит из 1540 десятиразрядных элементов. Средняя скорость передачи данных от устройства МСУ-МР составляет 603 кбит/с.
Бортовая информационная система с радиолинией метрового диапазона волн выбирает для обработки и передачи потребителю три канала из шести. Выбор производится по командам с Земли или от бортовой системы управления КА, при этом допускается любая комбинация каналов из возможных шести на борту.
Десятиразрядные элементы изображения, получаемые от МСУ-МР, усекаются до восьми разрядов, после чего изображение подвергается сжатию в соответствии со стандартом JPEG, модифицированным для обработки непрерывно тоновых изображений с фиксированным коэффициентом сжатия. Фиксированный коэффициент сжатия применяется для уменьшения размеров сглаживающего буфера при работе с постоянной скоростью выходного потока без риска переполнения.
Основными функциями алгоритма JPEG являются формирование исходного элемента изображения (MCU), представляющего собой матрицу 8х8 (8 строк на 8 пикселей), квантование, зигзагообразное упорядочивание и кодирование по Хаффману. Обработка производится в соответствии с рекомендациями, приведенными в [3].
Алгоритм сжатия выполнен в соответствии с рекомендациями, приведенными в документе [2].
Блок формирования цифрового потока М-диапазона формирует из потока получаемого от МСУ-МР полосы изображения для каждого из выбранных для передачи каналов. Полоса каждого канала содержит 8 строк по 1536 пикселов исходного изображения. Полученные полосы подвергаются сжатию и упаковываются в парциальные пакеты с собственными идентификаторами (APID).
Формируется следующая последовательность информации: пакеты изображений от трех выбранных каналов, пакет калибровочных данных. Данная последовательность повторяется в темпе получения сканированного изображения.
Полоса одного канала отсканированного изображения содержит 192 MCU. В процессе сжатия полоса делится на 16 сегментов по 12 MCU. Для каждого закодированного сегмента формируется свой парциальный пакет. Все пакеты полосы одного канала имеют один и тот же APID и передаются последовательно по мере формирования. Размер парциальных пакетов сжатого изображения является переменной величиной.
Парциальные кадры исходной информации упаковываются в транспортные кадры выходного потока информации.
Полученные сжатые данные подвергаются кодированию кодом Рида-Соломона. В соответствии с CCSDS [4] применяется код Рида-Соломона [255,223] с глубиной интерливинга, равной 4.
Из полученных транспортных кадров формируются коммуникационные пакеты. С этой целью все полученные 8160 бит транспортного кадра подвергаются скремблированию, т.е. перемножаются с псевдослучайной последовательностью.
Псевдослучайная последовательность генерируется в соответствии с полиномом:

К подвергнутому скремблированию пакету добавляется 32 битный маркер синхронизации. Вместе с маркером длина коммуникационного пакета составляет 8192 бита.
Полученные коммуникационные пакеты передаются на устройство формирования потока физического уровня с фиксированной скоростью 72 кбит/с.
На физическом уровне производятся следующие операции по обработке коммуникационных пакетов:
- сверточное кодирование;
- инверсия вектора G2 потока;
- интерливинг (перемеживание) сигналов, прошедших сверточное кодирование;
- подстановка в поток маркеров синхронизации.
Сверточное кодирование производится по классическому алгоритму Уиттерби со следующими параметрами кодирующего устройства: кодовое отношение r=1/2; длина кодового вектора 7 бит; рабочие векторы на выходе G1=1111001/G2=1011011; инверсия символов является дополнительной функцией (подключаемой по команде управления).
Сформированные на выходах устройства сверточного кодирования сигналы векторов G1 и G2 поступают на вход устройства интерливинга.
Устройство интерливинга представляет собой набор сдвиговых регистров, в котором каждый поступающий на вход бит записывается в следующий по порядку регистр, а биты, поступившие ранее, сдвигаются на один такт. Биты потока вектора G1 подаются на нечетные ветви устройства, а вектора G2 - на четные. Устройство содержит 36 ветвей задержки. Величина элементарной задержки, то есть размерность базового сдвигового регистра, равна 2048 бит. Задержка в первой ветви устройства равна нулю, во второй - 2048, а в последней - 35*2048-71680 тактов.
Для возможности восстановления сигнала после демодуляции в битовый поток на выходе устройства интерливинга подставляется маркер синхронизации размером 8 бит со значением 27НЕХ. Маркер вводится в битовый поток после двукратного опроса последней (36-ой) ветви устройства интерливинга, т.е. через каждые 72 бита. Суммарная скорость потока на выходе устройства составляет 80 кбит/с.
Обработка потока с помощью устройства интерливинга является дополнительной функцией, подключаемой по внешней команде управления. Сформированный поток физического уровня подается на модулятор системы БИС-МВ. Выдача производится по синхросигналу, получаемому от модулятора двумя потоками соответствующими векторам G1 и G2 кодирующего устройства.
Питание БИС-МВ осуществляется от источников бортового питания постоянного тока напряжением от 24 до 34 В. БИС-МВ принимает от МСУ-МР сигналы (DATA - целевая информация (дифференциальный), CLK - тактовый сигнал (дифференциальный), DR (data ready) сигнал готовности к передаче информации (дифференциальный) по интерфейсу TLDS. Прием производится через первый вход блока (1).
БИС-МВ работает следующим образом.
На входы блоков (1, 3, 4) по командам управления от КА подается напряжение в 27 В. На второй вход блока (1) поступают команды управления. Управление БИС-МВ осуществляется внешними командами релейного типа. Команды управления (КУ) БИС-МВ представляют собой импульсы отрицательной полярности по шинам управления напряжением от "минус" 24 до "минус" 34 В на время от 0,385 до 0,415 с относительно шины +27 В. Ток потребления по каждой командной шине ≤1 А. Блок (1), в свою очередь, передает телеметрическую информацию о режимах работы блоков (1, 3, 4) на аппаратуру КА с первого выхода.
На первый информационный вход блока (1) поступает цифровое изображение Земли (сигналы DATA, CLK и DR по интерфейсу TLDS) от устройства МСУ-МР. Строка изображения состоит из 1540 десятиразрядных элементов. Средняя скорость передачи данных от устройства МСУ-МР составляет 603 кбит/с. Блок (1) выбирает для обработки и передачи потребителю три канала из шести. Выбор производится по командам управления, поступающим на второй вход от КА, при этом допускается любая комбинация каналов из возможных на борту шести. Десятиразрядные элементы изображения, получаемые от МСУ-МР, усекаются до восьми старших разрядов, после чего изображения подвергаются сжатию в соответствии с общеизвестным стандартом JPEG. Блок (1) формирует из потока, получаемого от МСУ-МР полосы изображения для каждого из выбранных для передачи каналов. Полоса каждого канала содержит 8 строк по 1536 пикселов исходного изображения. Полученные полосы подвергаются сжатию и упаковываются в парциальные пакеты с собственными идентификаторами (APID). Последовательность формируемой информации состоит из комбинации трех выбранных каналов, которая завершается пакетом калибровочных данных. Данная последовательность повторяется в темпе получения сканируемого изображения. Структура парциального пакета сжатого изображения (APID 64-69) приведена на фиг.1. Полоса одного канала отсканированного изображения содержит 192 минимальные единицы кодирования (MCU). В процессе сжатия полоса делится на 16 сегментов по 12 MCU. Для каждого закодированного сегмента формируется свой парциальный пакет. Все пакеты полосы одного канала имеют один и тот же АРГО и передаются последовательно по мере формирования. Размер парциальных пакетов сжатого изображения является переменной величиной. Полученные пакеты сжатого изображения подвергаются сверточному кодированию и поступают на первый вход блока (3) со второго выхода блока (1). Блок (3) формирует модулирующий сигнал, преобразовывает полученный цифровой сигнал в аналоговый сигнал при помощи ЦАПов. Полученный аналоговый сигнал фильтруется, с последующим дополнительным усилением, и поступает на квадратурный модулятор, входящий в состав блока (3) (плата ТА626-02), где накладывается на несущую частоту, после этого модулированный сигнал фильтруется, усиливается и подается на выход прибора (3), с которого сигнал поступает на вход блока (4), где сигнал усиливается и передается через антенный переключатель в антенно-фидерное устройство. Передача информации осуществляется в соответствии со стандартом ISO 7498-1 (ГОСТ 28 906-91) и рекомендациями CCSDS на несущих частотах 137,1 и 137,9 МГц с транспортной скоростью 72 или 80 Кбит/с, при следующих параметрах радиосигнала:
- мощность бортового радиопередающего устройства не менее 6,5 Вт;
- полоса частот радиосигнала 150 кГц;
- модуляция несущей частоты - квадратурная относительная фазовая манипуляция (QPSK) со значениями фаз ±45° и ±135°;
- точность установки несущей частоты с учетом коэффициента старения и температурного коэффициента не должна превышать ±15·10-6.
Таким образом, за счет расширения полосы радиоканала, модуляции опорного аналогового сигнала цифровым сжатым сигналом и применения специальных методов кодирования и обработки исходной информации передается большее количество информации с более высоким разрешением.
БИС-МВ используется в КА - метеонаблюдения в реальном масштабе времени, в частности КА «Метеор - М».
Источники информации
1. http://www2.ncdc.noaa.gov/docs/podug/index.htm.
2. "LRPT Reference Compressor and Decompressor Technical Note" MO-TN-ESA-SY-0124.
3. "Digital Compression and Coding of Continuous-tone Still Images, ISO/IEC CD10918-1, part 1, Draft, June 1991".
4. CCSDS Telemetry Channel Coding, CCDS 101.0-B-6 BLUE BOOK, October 2002.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ И ПЕРЕДАЧИ ДВУХКАНАЛЬНЫХ, В ТОМ ЧИСЛЕ СТЕРЕОФОНИЧЕСКИХ, СИГНАЛОВ ЗВУКОВОГО СОПРОВОЖДЕНИЯ, РАДИОВЕЩАНИЯ, ДАННЫХ И КОМАНД УПРАВЛЕНИЯ В СЕТЯХ ЭФИРНОГО И КАБЕЛЬНОГО ВЕЩАНИЯ (ВАРИАНТЫ), СИСТЕМА ПЕРЕДАЧИ СИГНАЛОВ МНОГОКАНАЛЬНОГО ЗВУКОВОГО СОПРОВОЖДЕНИЯ, РАДИОВЕЩАНИЯ, ДАННЫХ И КОМАНД УПРАВЛЕНИЯ В СЕТЯХ ЭФИРНОГО И КАБЕЛЬНОГО ВЕЩАНИЯ | 1999 |
|
RU2163420C2 |
| БОРТОВАЯ РАДИОАППАРАТУРА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2442723C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793106C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛОВ С МНОГОПОЗИЦИОННОЙ МАНИПУЛЯЦИЕЙ | 2018 |
|
RU2688135C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ОТОБРАЖЕНИЯ ИЗОБРАЖЕНИЙ НЕСКОЛЬКИХ ТЕЛЕВИЗИОННЫХ ПРОГРАММ | 2015 |
|
RU2666521C2 |
| АВТОНОМНЫЙ ПУНКТ ПРИЕМА ГЕЛИОГЕОФИЗИЧЕСКОЙ ИНФОРМАЦИИ | 2012 |
|
RU2510934C1 |
| СПОСОБ ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ГЕОТЕХНИЧЕСКИХ СИСТЕМ И БОРТОВОЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2307324C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ ИЗЛУЧЕНИЕМ | 2017 |
|
RU2692238C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516868C1 |
| МНОГОКАНАЛЬНЫЙ СКАНИРУЮЩИЙ РАДИОМЕТР С ШИРОКОЙ ПОЛОСОЙ ОБЗОРА | 2006 |
|
RU2324151C1 |
Изобретение относится к области космонавтики, а именно к обработке изображения Земной поверхности и передаче полученной информации на Землю, и предназначено для приема данных от бортовой информационной аппаратуры космического аппарата (КА), предварительной обработки этой информации и передачи преобразованной информации на пункты приема информации. Достигаемый технический результат заключается в переходе на цифровой формат передачи данных низкого разрешения, обеспечении требуемой точности изображения, упаковке сжатой информации в кадры цифрового международного формата LRPT (Low Rate Picture Transmission), который позволяет передавать значительно большее количество информации по сравнению с существующим аналоговым форматом APT за счет расширения полосы радиоканала и применения специальных методов кодирования и обработки исходной информации. 2 ил.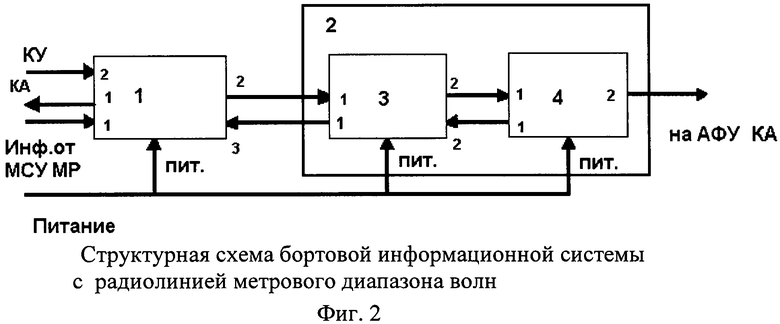
Бортовая информационная система с радиолинией метрового диапазона волн (БИС-МВ), состоящая из блока формирования цифрового потока метрового диапазона, передающего блока метрового диапазона, в состав которого входит блок четырехпозиционной фазовой манипуляции и блок усиления высокочастотного сигнала, при этом на первый информационный вход блока формирования цифрового потока метрового диапазона поступают сигналы от сканирующего устройства, на второй вход блока формирования цифрового потока метрового диапазона поступают команды управления от системы управления космического аппарата (КА), с первого выхода блока формирования цифрового потока метрового диапазона передается телеметрическая информация на КА о режимах работы блока формирования цифрового потока метрового диапазона, блока четырехпозиционной фазовой манипуляции и блока усиления высокочастотного сигнала, со второго выхода блока формирования цифрового потока метрового диапазона сигнал поступает на первый вход блока четырехпозиционной фазовой манипуляции, со второго выхода блока четырехпозиционной фазовой манипуляции сигнал поступает на первый вход блока усиления высокочастотного сигнала, с первого выхода блока усиления высокочастотного сигнала через второй вход блока четырехпозиционной фазовой манипуляции передается телеметрическая информация с первого выхода блока четырехпозиционной фазовой манипуляции о режиме работы блока усиления на третий вход блока формирования цифрового потока метрового диапазона, со второго выхода блока усиления высокочастотный сигнал подается на антенно-фидерное устройство для излучения на наземные пункты приема, при этом на питающие входы блока формирования цифрового потока метрового диапазона, блока четырехпозиционной фазовой манипуляции и блока усиления высокочастотного сигнала подается напряжение питания от внешнего источника питания постоянного тока КА.
| G.GOODRUM, K.B | |||
| KIDWELL, W | |||
| WINSTON | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| Устройство для охлаждения газа в скважинах подземного газогенератора | 1949 |
|
SU77738A1 |
| Круглый гребень к вытяжному прибору ватера суконного прядения | 1938 |
|
SU58276A1 |
| US 4975704 A, 04.12.1990 | |||
| US 2009182504 A1, 16.07.2009 | |||
| WO 8201076 A, 01.04.1982 | |||
| СПОСОБ РАБОТЫ СИСТЕМЫ ВЫПУСКА ДВИГАТЕЛЯ И СИСТЕМА ВЫПУСКА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2641865C2 |

