Изобретение относится к радиолокации и может использоваться в радиолокационных системах (РЛС) с синтезированием апертуры и непрерывным линейно-частотно-модулированным (ЛЧМ) излучением беспилотных летательных аппаратов для картографирования земной (морской) поверхности.
Известна радиолокационная система беспилотного летательного аппарата (Антипов В.Н., Колтышев Е.Е., Мухин В.В., Печенников А.В., Фролов А.Ю., Янковский В.Т. Радиолокационная система беспилотного летательного аппарата // Радиотехника. 2006. № 7. С. 14-20), бортовая часть которого содержит последовательно соединенные бортовую цифровую вычислительную машину управления, генератор ЛЧМ-сигнала, передатчик и передающую антенну, последовательно соединенные приемную антенну, приемник, смеситель, фазовый детектор, аналого-цифровой преобразователь и устройство регистрации, при этом второй вход смесителя соединен с выходом генератора ЛЧМ-сигнала, второй вход устройства регистрации соединен со вторым выходом БЦВМ управления, третий вход устройства регистрации соединен с навигационной системой, выход устройства регистрации соединен с наземной частью через систему передачи данных, наземная часть содержит последовательно соединенные блок сжатия сигнала по дальности, блок компенсации траекторных нестабильностей и блок автофокусировки, первый выход которого соединен с блоком селекции движущихся целей, а второй - с блоком сжатия сигнала по азимуту, при этом объединенные выходы блока селекции движущихся целей и блока сжатия сигнала по азимуту соединены с индикатором, устройством регистрации.
Недостатком известной радиолокационной системы беспилотного летательного аппарата является низкая помехозащищенность и высокие требования к пропускной способности канала передачи радиолокационных данных, а также низкая разрешающая способность вследствие зависимости модуляционной характеристики генератора ЛЧМ-сигнала от изменений температуры и напряжения питания.
Наиболее близким по технической сущности к заявляемому устройству (прототипом) является радиолокационная система дистанционного зондирования Земли (Радиолокационная система дистанционного зондирования Земли: пат. 2480788 Рос. Федерация: МПК G01S 13/90 / Прилуцкий А.А., Детков А.Н., Ницак Д.А.; заявитель и патентообладатель ООО «Интеллектуальные радиооптические системы». зявл. 27.12.10; опубл. 27.04.13, Бюл. № 12), бортовой сегмент которой включает последовательно соединенные бортовую цифровую вычислительную машину (БЦВМ) управления, генератор линейно-частотной модуляции сигнала, передатчик, передающую антенну, навигационную систему, последовательно включенные приемную антенну, приемник, балансный смеситель, второй вход которого соединен с генератором линейно-частотной модуляции сигнала, аналого-цифровой преобразователь, устройство регистрации радиолокационных данных, соединенное также с выходом навигационной системы, последовательно включенные устройство формирования кадра радиолокационных данных, вход которого подключен к выходу аналого-цифрового преобразователя и выходу навигационной системы, модулятор сигналов с широтно-импульсной модуляцией, умножитель, второй вход которого подключен через аттенюатор к выходу генератора линейно-частотной модуляции сигнала, высокочастотный модуль передатчика радиолинии, антенну передатчика радиолинии, а наземный сегмент включает последовательно соединенные буферное запоминающее устройство, цифровой спектроанализатор, блок компенсации траекторных нестабильностей и автофокусировки, блок сжатия по азимуту, устройство отображения информации и устройство регистрации радиолокационных изображений, последовательно включенные антенну приемника радиолинии, высокочастотный модуль приемника радиолинии, дешифратор широтно-импульсной модуляции, выход которого связан с выходом буферного запоминающего устройства, регистр сдвига, связывающий буферное запоминающее устройство и цифровой спектроанализатор, выход которого, в свою очередь, связан с входом блока сжатия по азимуту.
Основным недостатком прототипа является низкая разрешающая способность РЛС вследствие зависимости модуляционной характеристики генератора ЛЧМ-сигнала от изменений температуры и напряжения питания.
Техническим результатом изобретения является повышение разрешающей способности РЛС.
Указанный результат достигается тем, что в известной радиолокационной системе дистанционного зондирования Земли, бортовой сегмент которой содержит последовательно соединенные генератор ЛЧМ-сигнала, передатчик и передающую антенну, последовательно соединенные приемную антенну, приемник, балансный смеситель, аналого-цифровой преобразователь, устройство формирования кадра радиолокационных данных, модулятор сигналов с широтно-импульсной модуляцией, умножитель, высокочастотный модуль передатчика радиолинии и антенну передатчика радиолинии, при этом второй выход генератора ЛЧМ-сигнала соединен со вторым входом балансного смесителя, а третий - со вторым входом умножителя, последовательно соединенные навигационную систему и устройство регистрации радиолокационных данных, первый вход которого объединен со вторым входом устройства формирования кадра радиолокационных данных, а второй вход - с первым входом устройства формирования кадра радиолокационных данных, согласно изобретению, в бортовой сегмент дополнительно введены последовательно соединенные синтезатор частот, фазовый детектор и следящее устройство, выход которого соединен со входом генератора ЛЧМ-сигнала, а также делитель частоты, вход которого соединен с четвертым выходом генератора ЛЧМ-сигнала, а выход - со вторым входом фазового детектора, при этом второй выход синтезатора частот соединен со вторым входом следящего устройства, а также второй выход навигационной системы соединен с входом синтезатора частот.
Сущность изобретения заключается в том, что в бортовой сегмент дополнительно введены последовательно соединенные синтезатор частот, фазовый детектор и следящее устройство, выход которого соединен со входом генератора ЛЧМ-сигнала, а также делитель частоты, вход которого соединен с четвертым выходом генератора ЛЧМ-сигнала, а выход - со вторым входом фазового детектора, при этом второй выход синтезатора частот соединен со вторым входом следящего устройства, а также второй выход навигационной системы соединен с входом синтезатора частот.
В бортовом сегменте РЛС с учетом навигационных параметров движения носителя синтезатор частот формирует два сигнала: низкочастотный эталонный ЛЧМ-сигнал и управляющий сигнал, соответствующий закону модуляции эталонного ЛЧМ-сигнала. Управляющий сигнал подается на генератор ЛЧМ-сигнала, с выхода которого высокочастотное напряжение подается на передатчик и излучается передающей антенной в направлении полосы обзора участка местности. Вместе с тем, высокочастотное напряжение с выхода генератора ЛЧМ-сигнала подается на делитель частоты, где производится снижение частот ЛЧМ-сигнала до значений, согласованных с частотами эталонного ЛЧМ-сигнала, и затем на фазовый детектор, где производится сравнение излучаемого и эталонного сигналов и формируется сигнал рассогласования их фаз, поступающий на следящее устройство.
В следящем устройстве на основе сигнала рассогласования фаз и закона модуляции эталонного ЛЧМ-сигнала производится экстраполяция и коррекция значений управляющего сигнала по критерию минимума ошибки слежения за законом модуляции. Скорректированный таким образом управляющий сигнал компенсирует нерегулярные искажения модуляционной характеристики генератора ЛЧМ-сигнала, возникающие при изменении рабочих температур или напряжения питания, а на выходе генератора ЛЧМ-сигнала формируется ЛЧМ-сигнал с высокой степенью линейности изменения частот, что обуславливает высокую разрешающую способность РЛС.
Этим достигается указанный в изобретении технический результат.
Сущность изобретения поясняют фиг. 1-3.
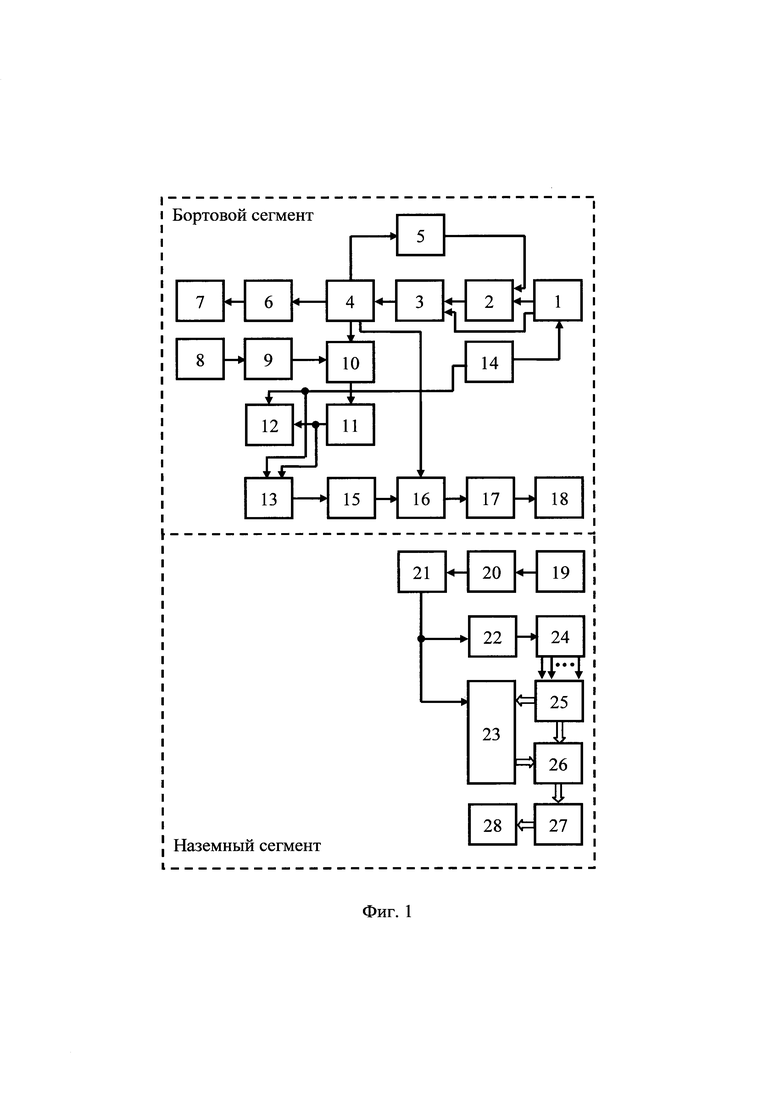
На фиг. 1 приведена структурная схема заявляемого устройства, где обозначены: 1 - синтезатор частот, 2 - фазовый детектор, 3 - следящее устройство, 4 - генератор ЛЧМ-сигнала, 5 - делитель частоты, 6 - передатчик, 7 - передающая антенна, 8 - приемная антенна, 9 - приемник, 10 - балансный смеситель, 11 - аналого-цифровой преобразователь, 12 - блок регистрации радиолокационных данных, 13 - блок формирования кадра радиолокационных данных, 14 - навигационная система, 15 - модулятор сигналов с широтно-импульсной модуляцией, 16 - умножитель, 17 - высокочастотный модуль передатчика радиолинии, 18 - антенна передатчика радиолинии, 19 - антенна приемника радиолинии, 20 - высокочастотный модуль приемника радиолинии, 21 - дешифратор широтно-импульсной модуляции, 22 - буферное запоминающее устройство, 23 - блок компенсации траекторных нестабильностей и автофокусировки, 24 - регистр сдвига, 25 - цифровой спектроанализатор, 26 - блок сжатия по азимуту, 27 - устройство отображения информации, 28 - устройство регистрации радиолокационных изображений.
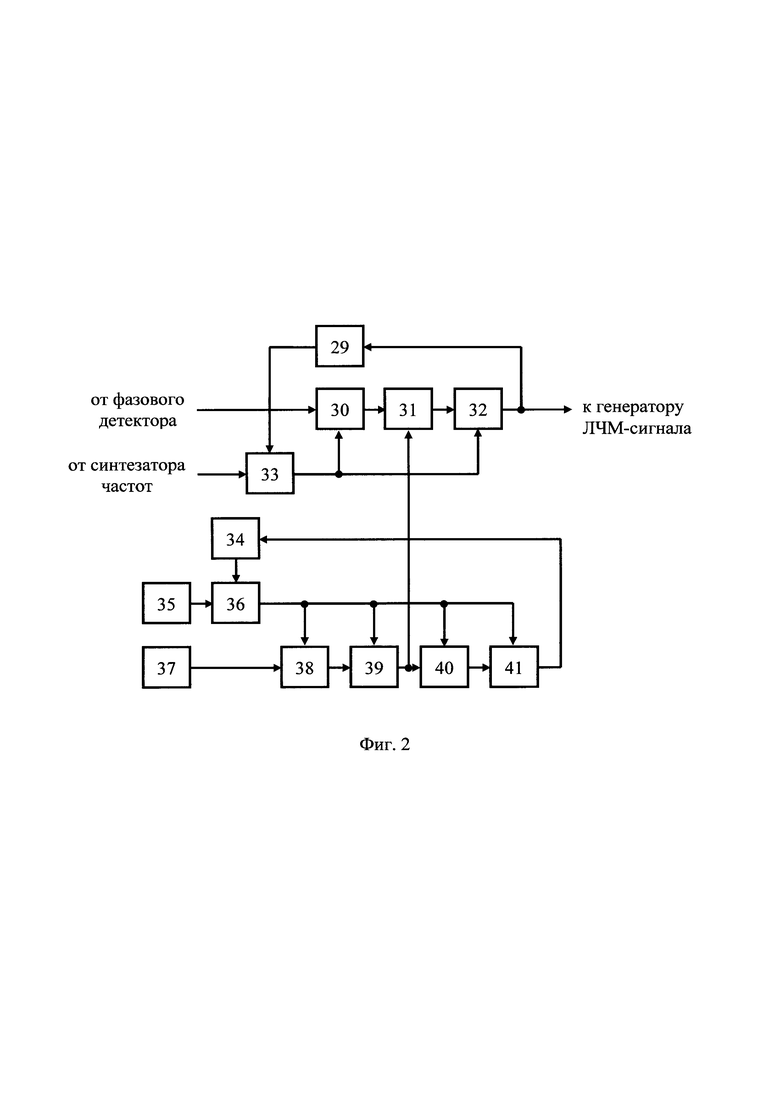
На фиг. 2 приведена функциональная схема следящего устройства 3, где обозначены: 29 - первая линия задержки на один шаг (такт), 30 - первое вычитающее устройство, 31 - первый умножитель, 32 - первый сумматор, 33 - второй сумматор, 34 - вторая линия задержки на один шаг (такт), 35 - первое устройство хранения информации, 36 - третий сумматор, 37 - второе устройство хранения информации, 38 - четвертый сумматор, 39 - делитель, 40 - второй умножитель, 41 - второе вычитающее устройство.
На фиг. 3 приведены графики, поясняющие сущность изобретения, где обозначены: а - управляющий сигнал, сформированный следящим устройством; б - спектрограмма выходного сигнала генератора ЛЧМ-сигнала без компенсации; в - спектрограмма выходного сигнала генератора ЛЧМ-сигнала с компенсацией.
Назначение синтезатора частот 1, фазового детектора 2 и делителя частоты 5 ясны из их названия. Следящее устройство 3 предназначено для формирования управляющего сигнала, компенсирующего нелинейности модуляционной характеристики генератора ЛЧМ-сигнала, обусловленные изменением температуры или напряжения питания.
Следящее устройство 3 может быть реализовано, например, в соответствии с приведенной на фиг. 2 схемой, и содержит последовательно соединенные первое вычитающее устройство, вход которого соединен с фазовым детектором, первый умножитель, первый сумматор, первую линию задержки на один шаг (такт) и второй сумматор, выход которого соединен с объединенными вторыми входами первого вычитающего устройства и первого сумматора, при этом выход первого сумматора также соединен с генератором ЛЧМ-сигнала, а также второй вход второго сумматора соединен с синтезатором частот, последовательно соединенные первое устройство хранения информации и третий сумматор, последовательно соединенные второе устройство хранения, четвертый сумматор, делитель, второй умножитель, второе вычитающее устройство и вторую линию задержки на один шаг (такт), выход которой соединен со вторым входом третьего сумматора, при этом выход третьего сумматора соединен с объединенными вторыми входами четвертого сумматора, делителя, второго умножителя и второго вычитающего устройства, а также выход делителя соединен со вторым входом первого умножителя.
Следящее устройство 3 работает следующим образом. Управляющий сигнал uk, например, треугольной или пилообразной формы, представляющий собой отсчеты требуемого закона модуляции, со второго выхода синтезатора частот 1 поступает на второй вход второго сумматора 33, на первый вход которого одновременно подается задержанная с помощью первой линии задержки на один шаг (такт) 29 оценка значения k-го отсчета закона модуляции  при этом на выходе второго сумматора 33 формируется экстраполированная оценка значения закона модуляции
при этом на выходе второго сумматора 33 формируется экстраполированная оценка значения закона модуляции 

Сигнал рассогласования фаз с выхода фазового детектора 2 zk поступает на первый вход первого вычитающего устройства 30, где вычисляется разность с поступающей на второй вход экстраполированной оценкой значения закона модуляции Полученная разность
Полученная разность  называемая невязкой, поступает на первый вход первого умножителя 31, где перемножается с коэффициентом усиления Kk, и суммируется в первом сумматоре 32 с экстраполированной оценкой значения закона модуляции
называемая невязкой, поступает на первый вход первого умножителя 31, где перемножается с коэффициентом усиления Kk, и суммируется в первом сумматоре 32 с экстраполированной оценкой значения закона модуляции  Таким образом формируется компенсирующий нелинейность модуляционной характеристики генератора ЛЧМ-сигнала 4 управляющий сигнал
Таким образом формируется компенсирующий нелинейность модуляционной характеристики генератора ЛЧМ-сигнала 4 управляющий сигнал  представляющий собой оценку значения отсчета закона модуляции на k-м шаге (такте):
представляющий собой оценку значения отсчета закона модуляции на k-м шаге (такте):

Коэффициент усиления Kk, вычисляется на основе экстраполированной ошибки

формируемой с помощью первого устройства хранения информации 35 со значением ковариации шума процесса Q и третьего сумматора 36, на второй вход которого одновременно подается значение ошибки на предыдущем шаге (такте) Pk-1, сформированное с помощью второй линии задержки на один шаг (такт) 34, а также значения ковариации шума R, записанного во второе устройство хранения информации 37, суммированного в четвертом сумматоре 38 с экстраполированной ошибкой с выхода третьего сумматора 36, с помощью делителя 39 в соответствии с выражением:
с выхода третьего сумматора 36, с помощью делителя 39 в соответствии с выражением:

Рассогласование на k-м шаге (такте) Рk на входе второй линии задержки на один шаг (такт) 34 формируется с помощью второго умножителя 40 и второго вычитающего устройства 41 в соответствии с выражением:

Таким образом, следящее устройство 3 формирует управляющий сигнал (фиг. 3, а), компенсирующий нелинейности модуляционной характеристики генератора ЛЧМ-сигнала 4 (фиг. 3, б), в результате чего на выходе генератора ЛЧМ-сигнала 4 формируется сигнал с линейно изменяющейся частотой (фиг. 3, в). При этом следящее устройство 3, в отличие от обычного фильтра низких частот с фиксированной частотой среза, работает во временной области, а не в частотной, и не зависит от диапазона и значений частот сигналов, формируемых генератором ЛЧМ-сигнала.
Синтезатор частот 1, фазовый детектор 2 и следящее устройство 3 могут быть выполнены на одной программируемой логической интегральной схеме (см., например, http://www.xilinx.com/products/silicon-devices/fpga.html. Дата обращения: 20.02.2017 г.). В качестве генератора ЛЧМ-сигнала 4 может быть применен генератор, управляемый напряжением.
Работа заявляемой радиолокационной станции с синтезированием апертуры и непрерывным линейно-частотно-модулированным излучением осуществляется следующим образом. На синтезатор частот 1 поступает информация о высоте полета и скорости движения носителя от навигационной системы 14, в соответствии с которыми в синтезаторе частот 1 устанавливаются требуемые параметры зондирующего ЛЧМ-сигнала: период модуляции и девиация частоты. Синтезатор частот 1 формирует два сигнала: эталонный ЛЧМ-сигнал, сформированный по требуемым параметрам, поступающий на первый вход фазового детектора 2, с выхода которого на первый вход следящего устройства 3 подается напряжение, пропорциональное разности фаз эталонного ЛЧМ-сигнала и ЛЧМ-сигнала, поступающего на второй вход фазового детектора 2 через делитель частоты 5 с четвертого выхода генератора ЛЧМ-сигнала 4, и управляющий сигнал, например, треугольной или пилообразной формы, соответствующий закону модуляции частоты эталонного ЛЧМ-сигнала, который поступает на второй вход следящего устройства 3. На выходе следящего устройства 3 формируется управляющий сигнал, компенсирующий нелинейность модуляционной характеристики генератора ЛЧМ-сигнала на основе сигнала рассогласования фаз и заданного закона модуляции. Напряжение на высокой частоте с выхода генератора ЛЧМ-сигнала 4 подается на вход передатчика 6, на выходе которого формируется сигнал, излучаемый антенной передатчика 7 в направлении полосы захвата участка местности.
Отразившись от участка местности, радиосигналы принимаются приемной антенной 8, усиливаются в приемнике 9 и проходят на первый вход балансного смесителя 10. Одновременно на второй вход балансного смесителя 10 подаются сигналы со второго выхода генератора ЛЧМ-сигнала 4, в результате чего на выходе балансного смесителя 10 формируются сигналы биений, частоты которых пропорциональны дальностям до целей в пределах полосы обзора участка местности. Действительная и мнимая части сигналов биений подвергается аналого-цифровому преобразованию в двухканальном аналого-цифровом преобразователе 11 и запоминаются в блоке регистрации радиолокационных данных 12, куда одновременно и синхронно записываются навигационные данные от навигационной системы 14, представляющие собой координатную информацию о центре масс носителя. Для передачи радиолокационных и навигационных данных на наземный сегмент в блоке формирования кадра радиолокационных данных 13 формируется кадр радиолокационных данных, в который входят радиолокационные данные (сигналы биений) и навигационные данные от навигационной системы 14, используемые в дальнейшей обработке в блоке сжатия по азимуту 26. Кадр радиолокационных данных представляет собой последовательный код, каждый двоичный символ которого кодируется в модуляторе сигналов с широтно-импульсной модуляцией 15 и поступает на первый вход умножителя 16, на второй вход которого подается сигнал с третьего выхода генератора ЛЧМ-сигнала 4. Таким образом, на выходе умножителя 16 формируется высокочастотный сигнал с широкополосной несущей, который усиливается в высокочастотном модуле передатчика радиолинии 17 и излучается антенной передатчика радиолинии 18 бортового сегмента.
Работа наземного сегмента РЛС осуществляется аналогично прототипу.
Таким образом, на основе параметров движения носителя происходит установка требуемых параметров зондирующего ЛЧМ-сигнала. С учетом значений рассогласования фаз эталонного и формируемого генератором сигналов, а также требуемого закона модуляции, в следящем устройстве производится коррекция управляющего сигнала, соответствующая компенсации искажений модуляционной характеристики генератора ЛЧМ-сигнала. Поэтому на выходе генератора ЛЧМ-сигнала формируется высокочастотное напряжение с высокой степенью линейности изменения частоты, что обеспечивает высокую разрешающую способность РЛС.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые элементы, широко распространенные в области электронной и электротехники.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2010 |
|
RU2480788C2 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ РЛС С ПЕРИОДИЧЕСКОЙ ЧМ МОДУЛЯЦИЕЙ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ СПОСОБ | 2006 |
|
RU2347235C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| СТАНЦИЯ ПРИЦЕЛЬНЫХ ПОМЕХ РАДИОЛИНИЯМ УПРАВЛЕНИЯ ВЗРЫВНЫМИ УСТРОЙСТВАМИ | 2005 |
|
RU2292059C1 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПО РАДИОЛУЧУ | 2003 |
|
RU2249229C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННАЯ РАДИОМАЯЧНАЯ СИСТЕМА ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2745836C1 |

Изобретение относится к радиолокации и может использоваться в радиолокационных системах с синтезированием апертуры и непрерывным линейно-частотно-модулированным (ЛЧМ) излучением беспилотных летательных аппаратов для картографирования земной (морской) поверхности. Техническим результатом изобретения является повышение разрешающей способности радиолокационной системы. Указанный технический результат достигается за счет компенсации нерегулярных нелинейностей модуляционной характеристики генератора ЛЧМ-сигнала, при этом в бортовой сегмент введены последовательно соединенные синтезатор частот, фазовый детектор и следящее устройство, выход которого соединен со входом генератора ЛЧМ-сигнала, а также делитель частоты, вход которого соединен с четвертым выходом генератора ЛЧМ-сигнала, а выход - со вторым входом фазового детектора, при этом второй выход синтезатора частот соединен со вторым входом следящего устройства, а второй выход навигационной системы соединен с входом синтезатора частот. 3 ил.
Радиолокационная станция с синтезированием апертуры и непрерывным линейно-частотно-модулированным излучением, бортовой сегмент которой содержит последовательно соединенные генератор линейно-частотно-модулированного (ЛЧМ) сигнала, передатчик и передающую антенну, последовательно соединенные приемную антенну, приемник, балансный смеситель, аналого-цифровой преобразователь, блок формирования кадра радиолокационных данных, модулятор сигналов с широтно-импульсной модуляцией, умножитель, высокочастотный модуль передатчика радиолинии и антенну передатчика радиолинии, при этом второй выход генератора ЛЧМ-сигнала соединен со вторым входом балансного смесителя, а третий выход - со вторым входом умножителя, последовательно соединенные навигационную систему и блок регистрации радиолокационных данных, первый вход которого объединен с первым входом блока формирования кадра радиолокационных данных, а второй вход - со вторым входом блока формирования кадра радиолокационных данных, а также наземный сегмент, содержащий последовательно соединенные антенну приемника радиолинии, высокочастотный модуль приемника радиолинии, дешифратор широтно-импульсной модуляции, буферное запоминающее устройство и регистр сдвига, имеющий N выходов, последовательно соединенные шинами данных цифровой спектроанализатор, имеющий N входов, блок компенсации траекторных нестабильностей и автофокусировки, блок сжатия по азимуту, устройство отображения информации и устройство регистрации радиолокационных изображений, при этом второй выход цифрового спектроанализатора соединен шиной данных со вторым входом блока сжатия по азимуту, второй вход блока компенсации траекторных нестабильностей и автофокусировки объединен с входом буферного запоминающего устройства, при этом n-й выход регистра сдвига соединен с соответствующим входом цифрового спектроанализатора, где  , отличающаяся тем, что в бортовой сегмент дополнительно введены последовательно соединенные синтезатор частот, фазовый детектор и следящее устройство, выход которого соединен со входом генератора ЛЧМ-сигнала, а также делитель частоты, вход которого соединен с четвертым выходом генератора ЛЧМ-сигнала, а выход - со вторым входом фазового детектора, при этом второй выход синтезатора частот соединен со вторым входом следящего устройства, а второй выход навигационной системы соединен с входом синтезатора частот.
, отличающаяся тем, что в бортовой сегмент дополнительно введены последовательно соединенные синтезатор частот, фазовый детектор и следящее устройство, выход которого соединен со входом генератора ЛЧМ-сигнала, а также делитель частоты, вход которого соединен с четвертым выходом генератора ЛЧМ-сигнала, а выход - со вторым входом фазового детектора, при этом второй выход синтезатора частот соединен со вторым входом следящего устройства, а второй выход навигационной системы соединен с входом синтезатора частот.
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2010 |
|
RU2480788C2 |
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| US 6781541 B1, 24.08.2004 | |||
| JP 5401890 B2, 29.01.2014 | |||
| US 20160170019 A1, 16.06.2016 | |||
| Схват манипулятора | 1987 |
|
SU1426785A1 |

