Предлагаемый способ и устройство для его реализации относятся к области экологического мониторинга природно-антропогенных геосистем, в частности, территорий нефтегазовых месторождений.
Экстенсивное освоение нефтегазовых месторождений порождает серьезные проблемы, связанные с угрозой экологической безопасности для этих территорий. Нарушения технологии освоения месторождений, техногенные аварии в промысловых зонах и трубопроводах приводят в результате к необратимой деградации почвы.
Разработка высокоэффективных геоинформационных систем оперативного геоэкологического контроля является необходимым условием для выполнения программы Государственного контроля использования и охраны земель. Особенностью таких систем является способность функционирования в тяжелых природных условиях на труднодоступных территориях с огромными площадями контроля.
Известны способы съемки пролетаемой территории и системы, обеспечивающие технологию съемки, сбора и обработки информации (патенты РФ №2044273, 2188391, 2227271; патент ФРГ №4419359; патент США №3819862; патент Великобритании №2179480; патент WO №95/33973; патент ЕР №1241441; Система экологического мониторинга типового города. НПП Экотехника. BOO им. Рождественского, ВОС ВОИР, Тверь, 1992 и другие).
Из известных способов наиболее близким к предлагаемому является «Способ локального аэромониторинга геотехнических систем и бортовой комплекс для его осуществления» (патент РФ №2227271, G01С 11/00, 2002), который и выбран в качестве прототипа.
Указанный способ включает съемку с выдерживанием трассы полета на высоте до 500 м с помощью курсовой камеры и навигационных данных, координатную привязку снимков с возможностью последующего их селективного вызова. Курсовую камеру и съемочную камеру устанавливают по продольной оси летательного аппарата. Съемочную камеру устанавливают с возможностью вращения в горизонтальной плоскости и направляют перпендикулярно линии съемочного галса. Курсовую камеру устанавливают с возможностью вращения в горизонтальной и вертикальной плоскостях и направляют на опознавательный знак в конце линии съемочного галса.
Способ обеспечивает повышение эффективности, сокращение времени и затрат на локальный аэромониторинг геотехнических систем линейного вида.
Однако известный способ обеспечивает экологический мониторинг только природно-антропогенных геосистем, в частности территорий нефтегазовых месторождений, но не позволяет осуществлять мониторинг чрезвычайных ситуаций техногенного, природного и экологического характера, возникающих на пролетаемой территории.
К чрезвычайным ситуациям техногенного характера относятся:
1. Транспортные аварии (катастрофы).
2. Пожары, взрывы.
3. Аварии с выбросом (угрозой выброса) сильнодействующих ядовитых веществ.
4. Аварии с выбросом (угрозой выброса) радиоактивных и биологически опасных веществ.
5. Аварии на электростанциях и энергетических системах.
6. Аварии на коммунальных системах жизнеобеспечения.
7. Аварии на очистных сооружениях.
8. Гидродинамические аварии (прорыв дамб, шлюзов, плотин и др.)
К чрезвычайным ситуациям природного характера относятся:
1. Геофизические опасные явления (землетрясения, извержения вулканов).
2. Геологические опасные явления (оползни, сели, обвалы, осыпи, лавины).
3. Метеорологические и агрометеорологические опасные явления: бури (9-11 баллов), ураганы (12-15 баллов), смерчи, торнадо, крупный град, сильный дождь (ливень), обильный снегопад, сильный гололед, сильный мороз, сильная жара, сильный туман.
4. Морские гидрологические опасные явления: тропические циклоны (тайфуны), цунами, сильный тягун в портах, напор льдов, интенсивный дрейф льдов.
5. Гидрологические опасные явления: резкий подъем уровня воды, следствием которого является наводнение, паводки, половодье, заторы и зажоры, ветровые нагоны.
6. Природные пожары (лесные пожары, степные пожары, торфяные пожары).
К чрезвычайным ситуациям экологического характера относятся:
1. Чрезвычайные ситуации, связанные с изменением состояния суши (недр, ландшафта):
а) просадки, оползни;
б) наличие тяжелых металлов, в том числе радионуклидов и других вредных веществ в почве (грунте) сверх предельно допустимых концентраций (ПДК);
в) критические ситуации, связанные с переполнением хранилищ вредными промышленными и бытовыми отходами и заражением окружающей среды.
2. Чрезвычайные ситуации, связанные с изменением состава и свойств атмосферы (воздушной среды):
а) изменение погоды или климата в результате антропогенной деятельности;
б) повышение ПДК вредных примесей в атмосфере;
в) температурные инверсии над крупными городами;
г) острый «кислотный» голод в городах и населенных пунктах;
д) значительное превышение предельно допустимого уровня шума в населенных пунктах;
е) образование обширной зоны кислотных осадков;
ж) разрушение озонового слоя атмосферы;
з) значительное изменение прозрачности атмосферы.
3. Чрезвычайные ситуации, связанные с изменением состояния гидросферы (водной среды):
а) резкая нехватка питьевой воды вследствие истощения вод или их загрязнения;
б) истощение водных ресурсов, необходимых для организации хозяйственно-бытового водоснабжения;
в) нарушение хозяйственной деятельности и экологического равновесия вследствие загрязнения зон внутренних морей и Мирового океана.
4. Чрезвычайные ситуации, связанные с изменением состояния биосферы:
а) исчезновение видов животных и растений, чувствительных к изменению условий среды обитания;
б) гибель растительности на обширной территории;
в) массовая гибель животных.
Технической задачей изобретения является расширение функциональных возможностей способа путем обнаружения, обработки и пеленгации сложных сигналов с фазовой манипуляцией, излучаемых радиодатчиками чрезвычайных ситуаций техногенного, природного и экологического характера на пролетаемой территории.
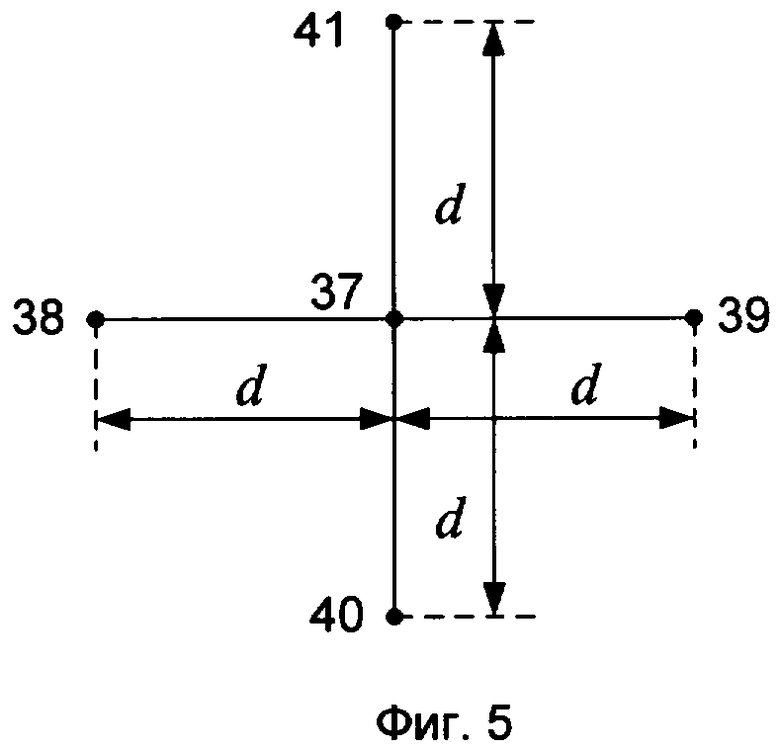
Поставленная задача решается тем, что согласно способу локального аэромониторинга геотехнических систем, включающему съемку с выдерживанием трассы полета на высоте до 500 м с помощью курсовой камеры и навигационных данных, координатную привязку снимков с возможностью последующего их селективного вызова, при этом курсовую камеру и съемочную камеру - TV камеру высокого разрешения - устанавливают по продольной оси летательного аппарата с возможностью вращения в горизонтальной плоскости и направляют перпендикулярно линии съемочного галса, а курсовую камеру - с возможностью вращения в горизонтальной и вертикальной плоскостях и направляют на опознавательный знак в конце линии съемочного галса, в штатном режиме съемки камеры устанавливают так, что их оптические оси лежат в плоскости, проходящей через продольную ось летательного аппарата и линию съемочного галса, а при режиме ветрового воздействия съемочный галс выдерживают путем поворота камер на угол компенсации и в интерактивном режиме отслеживают по положению отображаемого на бортовых видеомониторах опознавательного знака и по навигационным данным, получение которых синхронизируют с проведением радиометрической и геометрической коррекции с последующим сжатием, сохранением и регистрацией покадровой видеоинформации в геоинформационной базе данных, сложные сигналы с фазовой манипуляцией, излучаемые радиодатчиками чрезвычайных ситуаций техногенного, природного и экологического характера, принимают на пять антенн, расположенных на борту летательного аппарата в виде геометрического креста, в центре которого помещают антенну измерительного канала, общую для четырех пеленгационных каналов, расположенных в азимутальной и угломестной плоскостях, по два на каждую плоскость, образуя тем самым в каждой плоскости две измерительные базы d и 2d, между которыми устанавливают неравенство

где λ - длина волны,
при этом меньшие базы d образуют грубые, но однозначные шкалы отчета углов, а большие базы 2d образуют точные, но неоднозначные шкалы отсчета углов, в измерительном канале осуществляют поиск сигналов по частоте в заданном диапазоне частот, преобразуют по частоте принимаемый сигнал, выделяют напряжение промежуточной частоты, измеряют ширину спектра принимаемого сигнала промежуточной частоты непосредственно и после удвоения его фазы, сравнивают их между собой и при значительном различии принимают решение об обнаружении сложного сигнала с фазовой манипуляцией и дальнейшей его обработке, выделяют гармоническое напряжение удвоенной промежуточной частоты, делят его фазу на два, выделяют гармоническое напряжение промежуточной частоты, используют его в качестве опорного напряжения для синхронного детектирования сложного сигнала с фазовой манипуляцией промежуточной частоты, выделяют низкочастотное напряжение, регистрируют и анализируют его, в пеленгационных каналах принимаемые сложные сигналы с фазовой манипуляцией перемножают с напряжением промежуточной частоты, выделяют гармонические напряжения на частоте гетеродина, измеряют фазовые сдвиги между напряжением гетеродина и гармоническими напряжениями первого и второго пеленгационных каналов, между гармоническими напряжениями первого и второго пеленгационных каналов, между гармоническими напряжениями третьего и четвертого пеленгационных каналов, регистрируют и анализируют их.
Поставленная задача решается тем, что бортовой комплекс для локального аэромониторинга геотехнических систем, включающий блок аэровизуального наблюдения объекта съемки на базе курсовой и съемочной камер, а также блок управления полетом по плану местности, снабженный бортовыми компьютерами и системой определения навигационных данных на базе GPS-приемника, датчиков углов поворота камер, при этом блок аэровизуального наблюдения соединен с блоком управления полетом с возможностью синхронного позиционирования на видеомониторах информации от обеих камер, блок аэровизуального наблюдения выполнен в виде горизонтально размещенной по продольной оси летательного аппарата демпфирующей платформы, содержащей коаксиально расположенные неподвижное и поворотное кольцо с установленной на нем с возможностью вращения в вертикальной плоскости курсовой камеры, а съемочная камера - TV камера высокого разрешения - установлена с возможностью перемещения на любое из колец, а именно: в штатном режиме съемки камера установлена на неподвижном кольце так, что оптические оси камер в плоскости, проходящей через продольную ось летательного аппарата и линию съемочного галса, а при режиме ветрового воздействия - на поворотном кольце, и развернута на угол компенсации угла ветрового скольжения, снабжен радиодатчиками чрезвычайных ситуаций техногенного, природного и экологического характера, каждый из которых состоит из последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен с выходом генератора модулирующего кода, усилителя мощности с передающей антенны, и приемником-пеленгатором, содержащим измерительный и четыре пеленгационных канала, при этом измерительный канал состоит из последовательно включенных приемной антенны, усилителя высокой частоты, смесителя, второй вход которого через гетеродин соединен с выходом блока поиска, усилителя промежуточной частоты, удвоителя фазы, второго измерителя ширины спектра, блока сравнения, второй вход которого через первый измеритель ширины спектра соединен с выходом усилителя промежуточной частоты, порогового блока, второй вход которого через линию задержки соединен с его выходом, и ключа, второй вход которого соединен с выходом усилителя промежуточной частоты, последовательно подключенных к выходу удвоителя фазы первого узкополосного фильтра, делителя фазы на два, второго узкополосного фильтра и фазового детектора, второй вход которого соединен с выходом ключа, а выход подключен к первому входу блока регистрации, при этом управляющий вход блока поиска соединен с выходом порогового блока, каждый пеленгационный канал состоит из последовательно включенных приемной антенны, усилителя высокой частоты, перемножителя, второй вход которого соединен с выходом ключа, узкополосного фильтра и фазового детектора, выход которого подключен к соответствующему входу блока регистрации, при этом вторые входы фазовых детекторов первого и третьего пеленгационных каналов соединены с выходом гетеродина, вторые входы фазовых детекторов второго и четвертого пеленгационных каналов соединены с выходами узкополосных фильтров первого и третьего пеленгационных каналов соответственно, приемные антенны размещены в виде геометрического креста, в центре которого помещена приемная антенна измерительного канала, общая для четырех пеленгационных каналов, расположенных в азимутальной и угломестной плоскостях, по два на каждую плоскость, образуя тем самым в каждой плоскости две измерительные базы d и 2d, между которыми установлено неравенство

где λ - длина волны,
причем меньшими базами d образованы грубые, но однозначные шкалы отсчета углов, а большими базами 2d образованы точные, но неоднозначные шкалы отсчета углов.
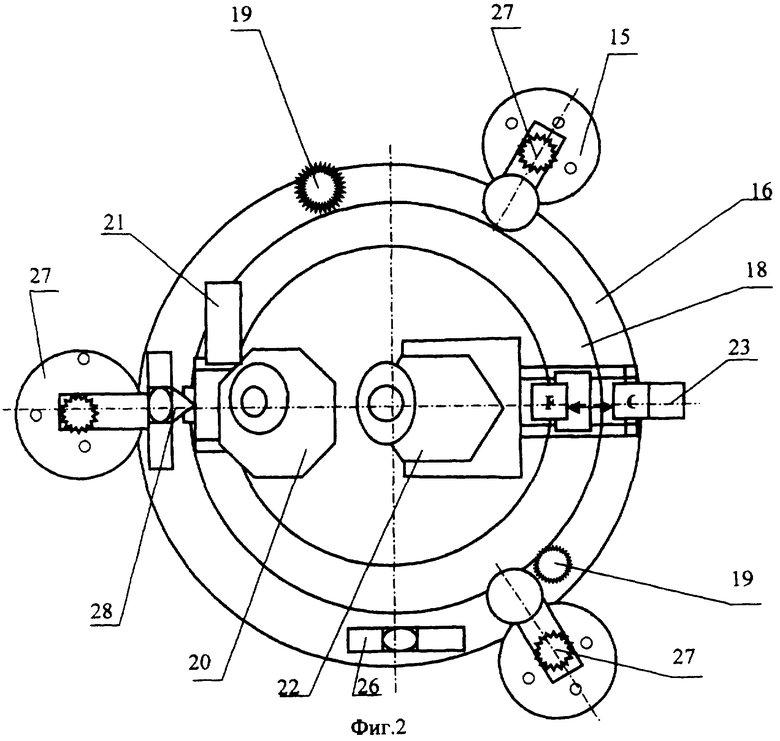
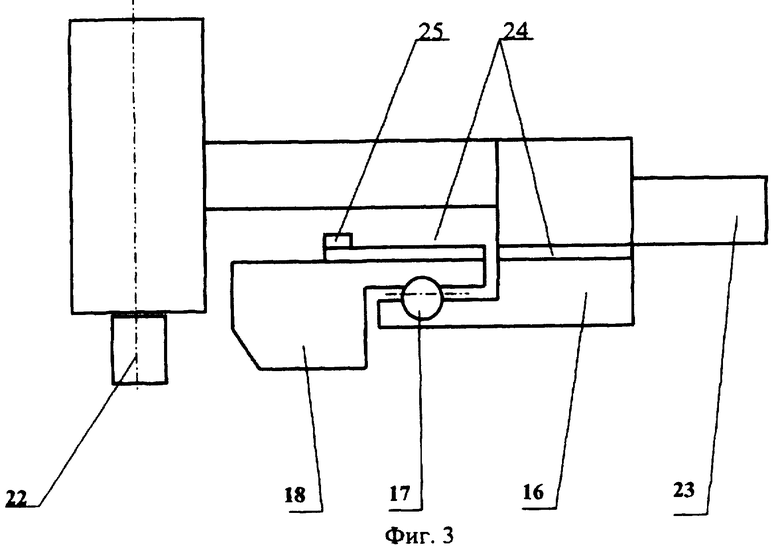
Структурная схема бортового комплекса, реализующего предлагаемый способ, представлена на фиг.1. Компоновка платформы блока аэровизуального наблюдения изображена на фиг.2. Узел крепления съемочной камеры показан на фиг.3. Структурная схема приемника-пеленгатора представлена на фиг.4. Взаимное расположение приемных антенн показано на фиг.5. Временные диаграммы, поясняющие работу приемника-пеленгатора, изображены на фиг.6.
Съемку осуществляют синхронно с получением планово-высотных координат от GPS-приемника 1. Бортовой ПК 2 оснащен генератором 3 времени, до вылета откалиброванных по атомным часам Сервера точного времени 5 через Iuternet посредством модема 4. Цифровая видеоинформация от курсовой камеры 6 поступает в бортовой ПК 2 через порт 7 IEEE-1394 непрерывным потоком с частотой 25 кадров в секунду, т.е. с частотой кадров телевизионного сигнала PAL. GPS-информация поступает через порт 8 СОМ-1 с частотой один отсчет информации в секунду. В каждом отсчете содержится информация о планово-высотных координатах центра видеокадра в системе координат WGS-84, азимуте из центра предыдущего видеокадра, расстояние от центра предыдущего видеокадра, скорости и абсолютной высоты полета и времени по атомным часам GPS-системы. К порту 9 СОМ-2 подключен мультиплексор 13, получающий данные лазерного высотомера 10, а также датчиков углов поворота (азимута) кольца платформы 11 и датчика вертикальных углов (места) 12 и преобразующий их в цифровую форму.
По сигналу генератора 3 времени осуществляют выборку данных с заданным интервалом времени и в блоке 14 накопления данных производят запись на HDD отобранного видеокадра и соответствующих ему атрибутивных данных: планово-высотные координаты центра видеокадра; время «захвата» видеокадра; текущий азимут полета; относительная высота по лазерному высотомеру от центральной точки видеокадра; путевая скорость летательного аппарата; данные об азимуте и угле места для курсовой камеры.
Автоматизированная обработка этих данных совместно с априорной геодезической информацией (цифровой картой местности) позволяет решить задачу привязки сотен тысяч видеокадров высокого разрешения с требуемой точностью, т.е. создавать покрытия в заданном масштабе, картографические проекции в геодезической системе координат на линейные и площадные объекты природно-антропогенных геотехнических систем.
Демпфирующая платформа размещена горизонтально по оси летательного аппарата на подвесных опорах 15 и содержит коаксиально расположенные неподвижное внешнее кольцо 16 и установленное на подшипниковой опоре 17 поворотное внутренне кольцо 18 с приводом вращения 19. На кольце 18 установлена курсовая камера 20 с возможностью вращения в вертикальной плоскости с помощью привода вращения 21. Съемочная камера 22 может быть установлена как на внешнем кольце 16, так и на поворотном кольце 18 путем перемещения с помощью соленоида 23 по направляющим 24, размещенным на кольцах платформы в месте установки съемочной камеры 22. Направляющие оснащены ограничителями 24. Кроме того, внешнее кольцо 16 оборудовано уровнем 26, микрометрическими винтами 27 и фиксатором 28 для поворотного кольца.
Бортовой комплекс для локального аэромониторинга геотехнических систем содержит также приемник-пеленгатор 36 с приемными антеннами 37-41.
Система, реализующая предлагаемый способ, снабжена радиодатчиками техногенного 29.i (i=1, ..., n), природного 30.j (j=1, ..., m) и экологического 31.γ (γ=1, ..., k) характера, каждый из которых состоит из последовательно включенных задающего генератора 32, фазового манипулятора 34, второй вход которого соединен с выходом генератора 33 модулирующего кода и усилителя 35 мощности с передающей антенной.
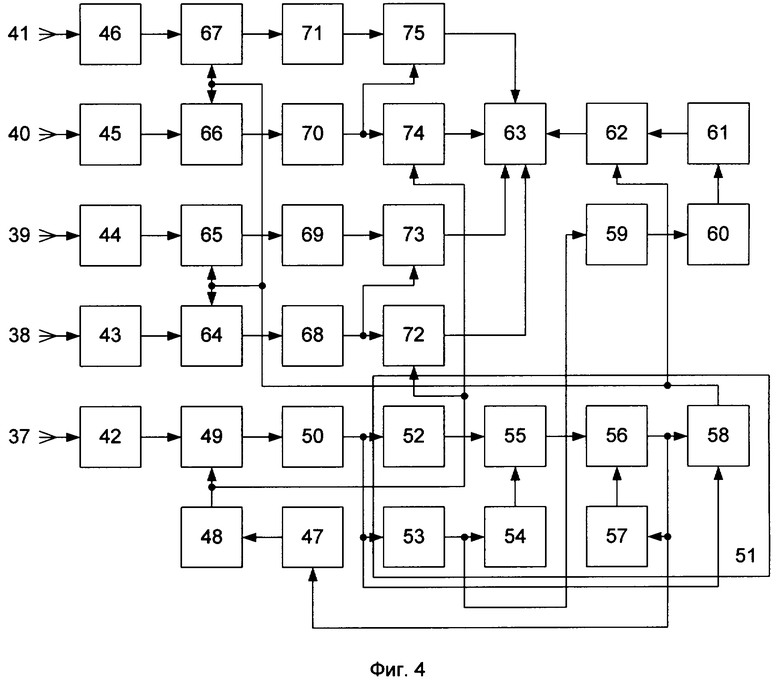
Бортовой приемник-пеленгатор 36 содержит информационный и четыре пеленгационных канала.
Информационный канал содержит последовательно включенные приемную антенну 37, усилитель 42 высокой частоты, смеситель 49, второй вход которого через гетеродин 48 соединен с выходом блока 47 поиска, усилитель 50 промежуточной частоты, удвоитель 53 фазы, второй измеритель 54 ширины спектра, блок 55 сравнения, второй вход которого через первый измеритель 52 ширины спектра соединен с выходом усилителя 50 промежуточной частоты, пороговый блок 56, второй вход которого через линию 57 задержки соединен с его выходом и ключ 58, второй вход которого соединен с выходом усилителя 50 промежуточной частоты, последовательно подключенные к выходу удвоителя 53 фазы первый узкополосный фильтр 59, делитель 60 фазы на два, второй узкополосный фильтр 61 и фазовый детектор 62, второй вход которого соединен с выходом ключа 58, а выход подключен к первому входу блока 63 регистрации, при этом управляющий вход блока 47 поиска соединен с выходом порогового блока 56. Измерители 52 и 54 ширины спектра, удвоитель 53 фазы, блок 55 сравнения, пороговый блок 56, линия 57 задержки и ключ 58 образуют обнаружитель (селектор) ФМн-сигналов.
Каждый пеленгационный канал содержит последовательно включенные приемную антенну 38 (39, 40, 41), усилитель 43 (44, 45, 46) высокой частоты, перемножитель 64 (65, 66, 67), второй вход которого соединен с выходом ключа 58, узкополосный фильтр 68 (69, 70, 71) и фазовый детектор 72 (73, 74, 75), выход которого подключен к соответствующему входу блока 63 регистрации. Причем вторые входы фазовых детекторов 72 и 74 первого и третьего пеленгационных каналов соединены с выходом гетеродина 48. Вторые входы фазовых детекторов 73 и 75 второго и четвертого пеленгационных каналов соединены с выходами узкополосных фильтров 68 и 70 первого и третьего пеленгационных каналов соответственно.
Приемные антенны размещены в виде геометрического креста, в центре которого помещена приемная антенна 37 измерительного канала, общая для четырех пеленгационных каналов, расположенных в азимутальной и угломестной плоскостях, по два на каждую плоскость, образуя тем самым в каждой плоскости две измерительные базы d и 2d, между которыми установлено неравенство

где λ - длина волны,
причем меньшими базами d образованы грубые, но однозначные шкалы отсчета углов, а большими базами 2d образованы точные, но неоднозначные шкалы отсчета углов (фиг.5).
Предлагаемый способ реализуется следующим образом.
Для аэромониторинга геоинформационных систем в штатном режиме съемки курсовую камеру 20 устанавливают на поворотном кольце 18 по продольной оси летательного аппарата и с помощью привода вращения 21 в вертикальной плоскости направляют на опознавательный знак в конце линии съемочного галса. Съемочную камеру 22 устанавливают на неподвижном внешнем кольце 16 на направляющих 24 и направляют перпендикулярно линии съемочного галса. Предварительно горизонтальное положение кольца 16 регулируют с помощью уровня 26 и микрометрических винтов 27. Камеры устанавливают так, что их оптические оси лежат в плоскости, проходящей через продольную ось летательного аппарата и линию съемочного галса. В этом положении кольцо 18, проградуированное на 360°, фиксируется с помощью фиксатора 27 на нулевой отметке.
В момент ветрового воздействия, когда происходит отклонение продольной оси летательного аппарата от линии съемочного галса, которое отражается в несовпадении текущего азимута полета с расчетным азимутом линии съемочного галса, пилот корректирует траекторию движения летательного аппарата, используя GPS-информацию. Одновременно на видеомониторе бортоператора наблюдается диагонально движущееся изображение подстилающей поверхности. Для осуществления съемки согласно с расчетным азимутом линии съемочного галса съемочная камера 22 включением соленоида 23 по направляющим 24 «выталкивается» на поворотное кольцо 18, которое с помощью привода 19 поворачивается на необходимый угол компенсации ветрового скольжения. На видеомониторе бортоператора изображение подстилающей поверхности наблюдается как вертикально движущееся, что свидетельствует о точном совпадении реальной линии съемочного галса с расчетной. В положении осуществления съемки оба кольца зафиксированы до момента, когда появляется очередная необходимость в изменении угла поворота.
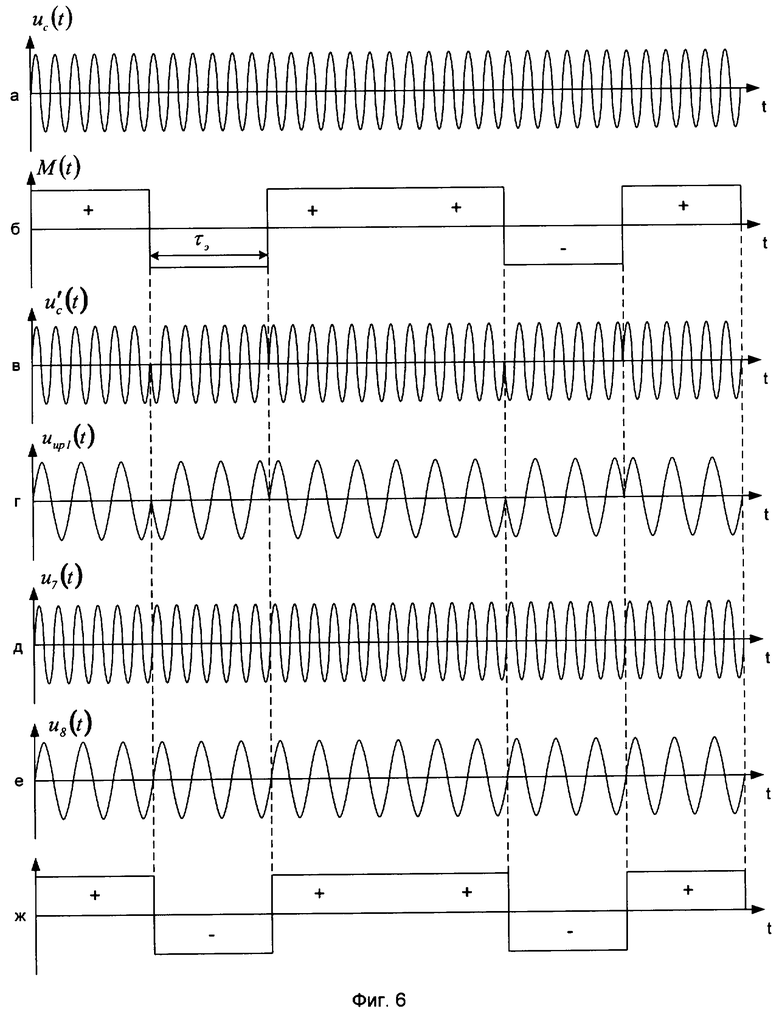
При возникновении чрезвычайной ситуации техногенного, природного или экологического характера включается соответствующий радиодатчик. При этом задающим генератором 32 формируется высокочастотное колебание (фиг.6,а)

где Uc, wc, ϕc, Tc - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания;
которое поступает на первый вход фазового манипулятора 34, на второй вход последнего подается модулирующий код M(t) (фиг.6,б) с выхода генератора 33 модулирующего кода. При этом модулирующий код M(t) в цифровой форме содержит все необходимые сведения о характере чрезвычайной ситуации. На выходе фазового манипулятора 34 образуется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.6,в)

где ϕк(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t), причем ϕк(t)=const при кτэ<t<(к+1)τэ и может изменяться скачком при t=кτэ, т.е. на границах между элементарными посылками (к=1, ..., N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc (Tc=N·τэ), который после усиления в усилителе 35 мощности излучается в эфир.
В приемнике-пеленгаторе 36, установленном на борту летательного аппарата, просмотр заданного диапазона частот Дƒ и поиск сложных ФМн-сигналов, излучаемых радиодатчиками техногенного 2.9.i(i=1, ..., n), природного 30.j(j=1, ..., m) или экологического 31.γ(γ=1, ..., k) характера, осуществляется с помощью блока 47 поиска, который периодически с периодом ТП по пилообразному закону изменяет частоту wГ гетеродина 48. В качестве блока 47 поиска используется генератор пилообразного напряжения.
Принимаемые сложные ФМн-сигналы:





где ±Δw - нестабильность несущей частоты, обусловленная различными дестабилизирующими факторами, в том числе и эффектом Доплера;
с выхода приемных антенн 37-41 через усилители 42-46 высокой частоты поступают на первые входы смесителя 49 и перемножителей 64-67 соответственно. На второй вход смесителя 49 подается напряжение гетеродина 48

где  - скорость просмотра заданного диапазона частот Дƒ (скорость перестройки частоты гетеродина).
- скорость просмотра заданного диапазона частот Дƒ (скорость перестройки частоты гетеродина).
На выходе смесителя 49 образуются напряжения комбинационных частот. Усилителем 50 выделяется напряжение промежуточной частоты

где 
К1 - коэффициент передачи смесителя;
wпр=wс-wГ - промежуточная частота;
ϕпр=ϕ1-ϕГ.
которое поступает на вход обнаружителя (селектора) 51, состоящего из измерителей 52 и 54 ширины спектра, удвоителя 53 фазы, блока 55 сравнения, порогового блока 56, линии 57 задержки и ключа 58.
При этом на выходе удвоителя 53 фазы образуется напряжение

в котором фазовая манипуляция уже отсутствует [2ϕк(t)={0,2π}].
Ширина спектра Δƒc сложного ФМн-сигнала определяется длительностью τэ его элементарных посылок  Тогда как ширина спектра Δƒ2 его второй гармоники определяется длительностью Тс сигнала
Тогда как ширина спектра Δƒ2 его второй гармоники определяется длительностью Тс сигнала 
Следовательно, при удвоении фазы широкополосного ФМн-сигнала его спектр «сворачивается» в N раз
Δƒс/Δƒ2=N.
Это обстоятельство позволяет обнаружить и отселектировать ФМн-сигнал среди других сигналов и помех.
Ширина спектра Δƒc широкополосного ФМн-сигнала измеряется с помощью измерителя 52 ширины спектра, а ширина спектра Δƒ2 его второй гармоники измеряется с помощью измерителя 54 ширины спектра. Напряжения U1 и U2, пропорциональные Δƒс и Δƒ2 соответственно, с выхода измерителей 52 и 54 поступают на два входа блока 55 сравнения.
Если на два входа блока 55 сравнения поступают приблизительно одинаковые по интенсивности напряжения, то на его выходе напряжение отсутствует. Если на два входа блока 55 сравнения поступают разные по интенсивности напряжения, то на его выходе появляется постоянное напряжение.
Так как U1≫U2, то на выходе блока 55 сравнения формируется постоянное напряжение, которое поступает на вход порогового блока 56, где превышает пороговое напряжение Uпор. При превышении порогового напряжения Uпор на выходе порогового блока 56 формируется постоянное напряжение, которое поступает на управляющий вход ключа 58, открывая его, на вход линии 57 задержки и на управляющий вход блока 47 поиска, прекращая перестройку гетеродина 48. В исходном состоянии ключ 58 всегда закрыт.
При прекращении перестройки гетеродина 48 усилителем 50 промежуточной частоты выделяется следующее напряжение (фиг.6,г)

В этом случае на выходе удвоителя 53 фазы образуется следующее гармоническое напряжение (фиг.6,д):

которое выделяется узкополосным фильтром 59 и поступает на вход делителя 60 фазы на два, на выходе которого образуется следующее гармоническое напряжение (фиг.6,е)

Это напряжение используется в качестве опорного напряжения и подается на первый вход фазового детектора 62, на второй вход которого с выхода усилителя 50 промежуточной частоты через открытый ключ 58 поступает напряжение uпр1(t) (фиг.6,г). В результате синхронного детектирования на выходе фазового детектора 62 образуется низкочастотное напряжение (фиг.6,ж)

где 
К2 - коэффициент передачи фазового детектора
пропорциональное модулирующему коду M(t} (фиг.6,б), которое поступает на первый вход блока 63 регистрации, где фиксируется и анализируется.
Одновременно напряжение uпр1(t) с выхода усилителя 50 промежуточной частоты через открытый ключ 58 подается на вторые входы перемножителей 64-67 пеленгационных каналов. На выходах перемножителей 64-67 образуются следующие гармонические напряжения:




где 
К3 - коэффициент передачи перемножителей
α, β - угловые координаты радиодатчика (азимут и угол места)
которые выделяются узкополосными фильтрами 68-71 и поступают на первые входы фазовых детекторов 72-75 соответственно. На вторые входы фазовых детекторов 72 и 74 подается напряжение uГ(t) гетеродина 48. На вторые входы фазовых детекторов 73 и 75 подаются гармонические напряжения u9(t) и u11(f) с выходов узкополосных фильтров 68 и 70 соответственно.
Знаки «+» и «-» перед фазовыми сдвигами соответствуют диаметрально противоположным положениям приемных антенн 38 и 39, 40 и 41 относительно приемной антенны 37.
На выходах фазовых детекторов 72-75 образуются постоянные напряжения:




где 

которые поступают на соответствующие входы блока 63 регистрации, где они фиксируются и анализируются.
Время задержки τз линии 57 задержки выбирается таким, чтобы можно было произвести обработку обнаруженного ФМн-сигнала. По истечении этого времени напряжение с выхода порогового блока 56 через линию 57 задержки поступает на вход сброса порогового блока 56 и сбрасывает его в начальное (нулевое) состояние. При этом блок 47 поиска переводится в режим перестройки, а ключ 58 закрывается, т.е. переводится в исходное состояние.
В случае обнаружения следующего ФМн-сигнала на другой несущей частоте, излучаемого другим радиодатчиком, приемный пеленгатор 36 работает аналогичным образом.
Таким образом, предлагаемый способ по сравнению с прототипом обеспечивает обнаружение, обработку и пеленгацию сложных сигналов с фазовой манипуляцией, излучаемых радиодатчиками чрезвычайных ситуаций техногенного, природного и экологического характера. Тем самым функциональные возможности способа и устройства для его реализации расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКОЛОГИЧЕСКАЯ СИСТЕМА СБОРА ИНФОРМАЦИИ О СОСТОЯНИИ РЕГИОНА | 2004 |
|
RU2275689C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
| ЭКОЛОГИЧЕСКАЯ СИСТЕМА СБОРА ИНФОРМАЦИИ О СОСТОЯНИИ РЕГИОНА | 2011 |
|
RU2474882C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2010 |
|
RU2444461C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2004 |
|
RU2254262C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ САМОЛЕТОВ, ПОТЕРПЕВШИХ КАТАСТРОФУ | 2015 |
|
RU2630272C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2011 |
|
RU2458815C1 |
| БОРТОВАЯ СИСТЕМА ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ОБЪЕКТОВ ПРИРОДНО-ТЕХНОГЕННОЙ СФЕРЫ | 2006 |
|
RU2315951C1 |
| СПОСОБ ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ГЕОТЕХНИЧЕСКИХ СИСТЕМ И БОРТОВОЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2227271C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2186698C1 |
Группа изобретений относится к области экологического мониторинга природно-антропогенных геосистем, в частности, территорий нефтегазовых месторождений. Бортовой комплекс, реализующий предлагаемый способ, содержит GPS-приемник, пульт контроля, генератор времени, модем, атомные часы сервера точного времени, курсовую замеру, лазерный высотомер, кольцо платформы, датчик вертикальных углов, мультиплексор, блок накопления данных, подвесные опоры, внешнее кольцо, подшипниковую опору, поворотное кольцо, привод вращения, курсовую камеру, съемочную камеру, соленоид, направляющие, ограничитель, уровень, макрометрические винты, фиксатор, радиодатчики техногенного, природного и экологического характера. Каждый радиодатчик содержит задающий генератор, генератор модулирующего кода и усилитель мощности с передающей антенной. Бортовой приемник - пеленгатор содержит приемные антенны, усилители высокой частоты, блок поиска, гетеродин, смеситель, усилитель промежуточной частоты, обнаружитель сигналов с фазовой манипуляцией (ФМн), измерители ширины спектра, удвоитель фазы, блок сравнения, пороговый блок, линию задержки, ключ, узкополосные фильтры, делитель фазы на два, фазовые детекторы, блок регистрации и перемножители. Технический результат: расширение функциональных возможностей способа путем обнаружения, обработки и пеленгации сложных ФМн-сигналов, излучаемых радиодатчиками чрезвычайных ситуаций техногенного, природного и экологического характера на пролетаемой территории. 2 н.п. ф-лы, 6 ил.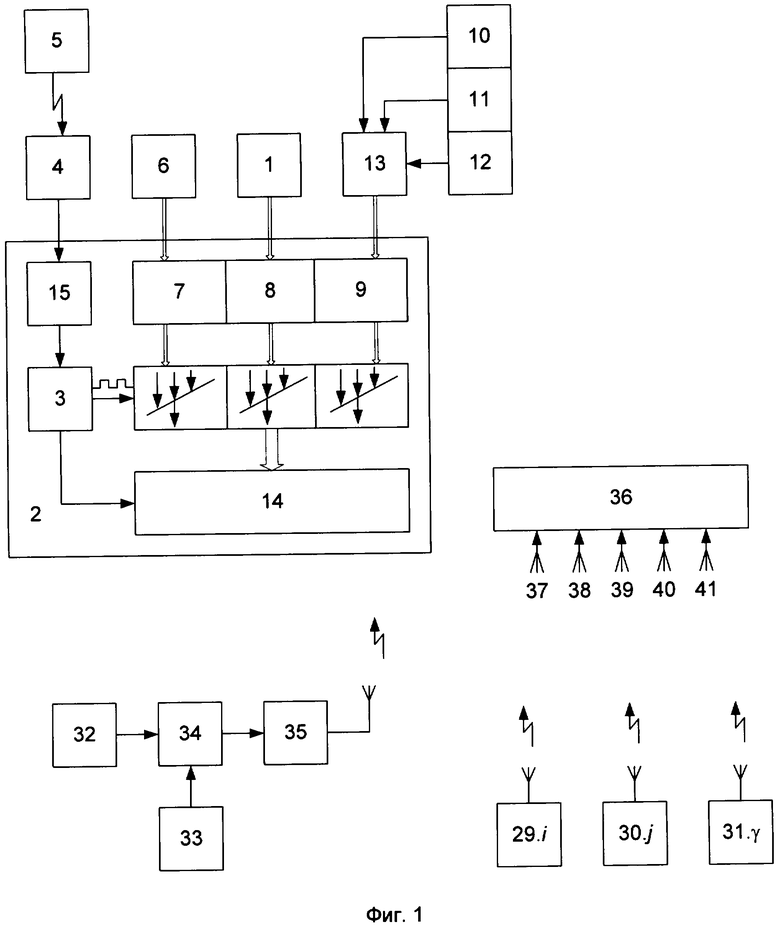
где λ - длина волны, при этом меньшие базы d образуют грубые, но однозначные шкалы отсчета углов, а большие базы 2d образуют точные, но неоднозначные шкалы отсчета углов, в измерительном канале осуществляют поиск сигналов по частоте в заданном диапазоне частот, преобразуют по частоте принимаемый сигнал, выделяют напряжение промежуточной частоты, измеряют ширину спектра принимаемого сигнала промежуточной частоты непосредственно и после удвоения его фазы, сравнивают их между собой и при значительном различии принимают решение об обнаружении сложного сигнала с фазовой манипуляцией и дальнейшей его обработке, выделяют гармоническое напряжение удвоенной промежуточной частоты, делят его фазу на два, выделяют гармоническое напряжение промежуточной частоты, используют его в качестве опорного напряжения для синхронного детектирования сложного сигнала с фазовой манипуляцией промежуточной частоты, выделяют низкочастотное напряжение, регистрируют и анализируют его, в пеленгационных каналах принимаемые сложные сигналы с фазовой манипуляцией перемножают с напряжением промежуточной частоты, выделяют гармонические напряжения на частоте гетеродина, измеряют фазовые сдвиги между напряжением гетеродина и гармоническими напряжениями первого и третьего пеленгационных каналов, между гармоническими напряжениями первого и второго пеленгационных каналов, между гармоническими напряжениями третьего и четвертого пеленгационных каналов, регистрируют и анализируют их.
где λ - длина волны, причем меньшими базами d образованы грубые, но однозначные шкалы отсчета углов, а большими базами 2d образованы точные, но неоднозначные шкалы отсчета углов.
| СПОСОБ ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ГЕОТЕХНИЧЕСКИХ СИСТЕМ И БОРТОВОЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2227271C1 |
| СПОСОБ ПОЛУЧЕНИЯ КРУПНОМАСШТАБНОЙ КАРТЫ ПАРАМЕТРОВ МНОГОМЕРНОЙ СТРУКТУРЫ ПРИРОДНОЙ СРЕДЫ И АЭРОФОТОСЪЕМОЧНЫЙ САМОЛЕТ ДЛЯ ЕЕ ПОЛУЧЕНИЯ | 1990 |
|
RU2044273C1 |
| СПОСОБ СОЗДАНИЯ ЦИФРОВЫХ ТОПОГРАФИЧЕСКИХ ФОТОПЛАНОВ С ПРИМЕНЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2188391C1 |
| ЛЕНТОЧНО-ШЛИФОВАЛЬНОЕ УСТРОЙСТВО С КОНТРОЛЬНЫМ ЭЛЕМЕНТОМ ГЛУБИНЫ ШЛИФОВАНИЯ | 2005 |
|
RU2342242C2 |
| Гидравлическая рулевая машина | 1977 |
|
SU763185A1 |

