Изобретение относится к медицине, а именно к офтальмохирургии, и предназначено для разрезания тканей глаза или интраокулярных имплантатов в случае необходимости удаления последних.
Известны офтальмохирургические ножницы, представленные в каталоге микрохирургических инструментов фирмы "TITAN MEDICAL Ltd" за 2009 г. под каталожным номером TMS 502.
Недостатки этой модели:
1) При проведении относительно длинного разреза концы режущих частей ножниц при раскрытии расходятся на расстояние, много большее толщины разрезаемого объекта, повышая риск травматизма внутриглазных структур.
2) При смыкании лезвия движутся под углом друг к другу, из-за чего разрезаемый объект может отталкиваться от режущих кромок в направлении концов режущих частей (эффект «отталкивания»), что затрудняет разрезание, увеличивая время операции. Эффект выражен тем сильнее, чем больше твердость разрезаемого объекта. В частности, данный эффект усложняет процедуру разрезания акриловых интраокулярных линз.
Техническим результатом согласно изобретению является снижение риска травматизации внутриглазных структур, сокращение времени хирургической операции, устранение эффекта «отталкивания», благодаря чему возникает возможность безопасного удаления акриловых интраокулярных линз и других интраокулярных имплантатов.
Технический результат достигается тем, что микрохирургические ножницы, состоящие из двух ножей и рукоятки в виде двух пружинящих рычагов, согласно изобретению дополнительно содержат полый корпус, имеющий тело и рабочую часть, которая сужена по направлению к рабочему концу корпуса, ножи закреплены в корпусе так, что их полотна выступают из рабочей части корпуса, режущие кромки ножей параллельны, хвостовики ножей расположены внутри корпуса, хвостовик одного ножа закреплен неподвижно (неподвижный нож), хвостовик другого ножа установлен подвижно (подвижный нож) с возможностью возвратно-поступательного движения хвостовика этого ножа в поперечном направлении относительно корпуса в плоскости полотна ножа, один из пружинящих рычагов является рабочим, а другой - холостым, при этом рабочий рычаг одним концом неподвижно закреплен снаружи на нерабочем конце корпуса, а другим концом, обращенным к рабочей части корпуса, соединен с механизмом, преобразующим возвратно-поступательное движение этого конца рычага вдоль корпуса в поперечное движение хвостовика подвижного ножа, холостой рычаг одним концом неподвижно закреплен снаружи на нерабочем конце корпуса, а другим концом, обращенным к рабочей части корпуса, соединен с механизмом, обеспечивающим при нажатии на рукоятку симметричность движения обоих рычагов, хвостовик подвижного ножа может возвращаться в исходное положение при прекращении нажатия на рукоятку за счет упругости ее рычагов. У микрохирургических ножниц на конце режущей кромки каждого ножа может быть выполнен зубец, лежащий в плоскости полотна ножа, либо режущие кромки ножей могут быть выполнены зазубренными для надежного захвата разрезаемого объекта и предотвращения его выскальзывания. У микрохирургических ножниц рабочая часть неподвижного ножа может иметь тавровый профиль, а рабочая часть подвижного ножа может иметь угловой профиль с углом в 90° для увеличения жесткости ножей и предотвращения их изгибания в процессе работы. При этом подвижный нож за счет своего углового профиля не ограничивает обзор разрезаемого объекта.
Возможны, например, следующие варианты практической реализации изобретения.
Хвостовик одного ножа закреплен в корпусе неподвижно, а хвостовик другого ножа соединен с корпусом подвижно с возможностью возвратно-поступательного движения хвостовика ножа в поперечном направлении относительно корпуса в плоскости полотна ножа и невозможностью продольных или вращательных перемещений хвостовика. На практике данное соединение может быть выполнено, например, следующими способами:
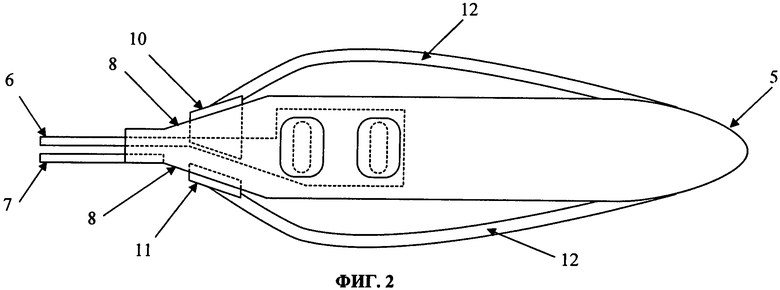
1) расположенная в нерабочей части корпуса часть хвостовика ножа имеет две прорези, а корпус снабжен двумя направляющими сухарями, как показано на фиг.2;
2) расположенная в нерабочей части корпуса часть хвостовика ножа имеет два паза, а корпус снабжен двумя направляющими гребнями, как показано на фиг.5.
Механизм передачи возвратно-поступательного движения конца рабочего рычага рукоятки вдоль корпуса в поперечное движение хвостовика подвижного ножа относительно корпуса в плоскости полотна ножа может быть реализован, например, следующим образом. Две противолежащие стороны суженной рабочей части корпуса выполнены плоскими (плоские поверхности) и перпендикулярны полотнам ножей. По продольной оси каждой из плоских поверхностей выполнена прорезь. С каждой из плоских поверхностей суженной рабочей части корпуса подвижно соединен ползун. Каждый из ползунов на каждой из двух своих боковых поверхностей имеет по продольному пазу и подвижно закреплен в прорези соответствующей плоской поверхности таким образом, что плоские поверхности представляют собой направляющие гребни, конгруэнтные выполненным в ползунах пазам. Один из ползунов является рабочим, а другой - холостым. Рабочий и холостой рычаги рукоятки соединены соответственно с рабочим и холостым ползунами. Рабочий ползун дополнительно содержит третий паз на обращенной внутрь корпуса поверхности и образует подвижное соединение «паз-гребень» с хвостовиком подвижного ножа таким образом, что хвостовик ножа представляет собой гребень, по которому может перемещаться ползун. При этом донная поверхность третьего паза расположена под острым углом к соответствующей плоской поверхности, вершина этого угла обращена в сторону рабочих частей ножей. Ползуны расположены симметрично друг другу относительно продольной оси корпуса. Таким образом образуется механизм передачи возвратно-поступательного движения конца рычага вдоль корпуса в поперечное движение хвостовика подвижного ножа. В процессе работы инструмента при нажиме на рычаги рукоятки ползуны перемещаются по направляющим гребням к рабочему торцу корпуса. При этом рабочий ползун, соединенный с хвостовиком подвижного ножа, скользит своим пазом по хвостовику подвижного ножа, конгруэнтному пазу. Поскольку донная поверхность паза расположена под острым углом к соответствующей плоской поверхности корпуса, ползун толкает хвостовик в поперечном направлении относительно корпуса так, что режущие кромки ножей сближаются, а затем боковые поверхности полотен ножей скользят друг по другу, обеспечивая разрезание.
Механизм, обеспечивающий при нажатии на рукоятку симметричность движения обоих рычагов, может быть реализован, например, следующим образом. Холостой ползун и связанный с ним рычаг рукоятки выполнены симметрично рабочему ползуну и связанному с ним рабочему рычагу рукоятки. При этом для дополнительного обеспечения симметричности движения рычагов рукоятки может быть применен механизм, состоящий из двух одинаковых дополнительных рычагов, каждый из которых одним концом шарнирно закреплен на соответствующем рычаге рукоятки, а другим концом шарнирно соединен с другим концом другого рычага так, что узел соединения установлен с возможностью движения в продольном направлении по направляющей в корпусе, как показано на фиг.6. Симметричность движения обоих рычагов рукоятки служит для обеспечения хирургу привычных тактильных ощущений при нажатии на рычаги.
Механизм, благодаря которому хвостовик подвижного ножа может возвращаться в исходное положение при прекращении нажатия на рукоятку, может быть реализован, например, следующим образом. При прекращении нажима на рычаги рукоятки, рукоятка в силу своей упругости возвращается в исходное положение, возвращая в исходное положение ползуны. При этом возвращение хвостовика подвижного ножа в исходное положение может производиться так:
1) в нерабочей части корпуса между поверхностью хвостовика подвижного ножа и стенкой корпуса закреплена пружина, прижимающая хвостовик к ползуну, как показано на фиг.4А, 4Г, 4Д;
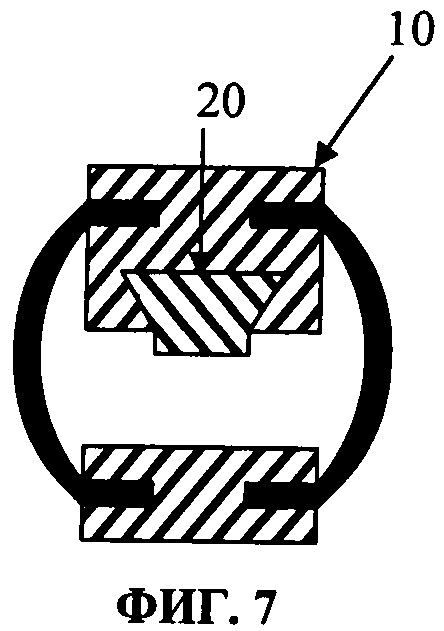
2) третий паз рабочего ползуна представляет собой паз «ласточкин хвост»; хвостовик подвижного ножа конгруэнтен пазу, как показано на фиг.7.
Для уменьшения трения скользящих друг по другу деталей их поверхности могут быть выполнены из тефлона.
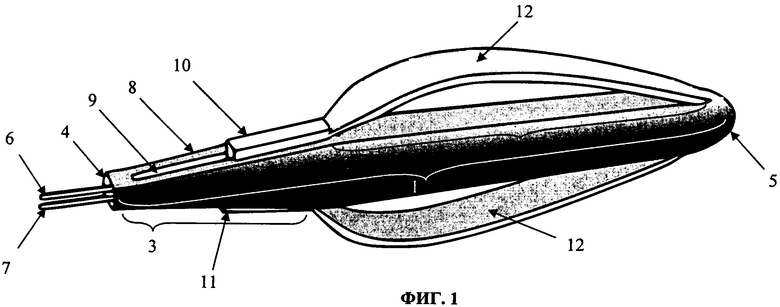
Изобретение иллюстрируется чертежами, где на фиг.1 показан общий вид ножниц, имеющих полый корпус 1, состоящий из тела 2, суженной рабочей части 3, рабочего конца 4 и нерабочего конца 5. Из рабочего конца 4 корпуса 1 выступают рабочая часть 6 подвижного ножа и рабочая часть 7 неподвижного ножа. Суженная рабочая часть 3 корпуса 1 имеет две противолежащие плоские поверхности 8 с прорезями 9, с которыми соединены рабочий ползун 10 и холостой ползун 11. Ножницы имеют рукоятку в виде двух пружинящих рычагов 12, каждый из которых одним концом неподвижно закреплен на нерабочем конце 5 корпуса 1, а другим концом неподвижно соединен с соответствующим ползуном 10 или 11.
На фиг.2 изображен вид ножниц сбоку.
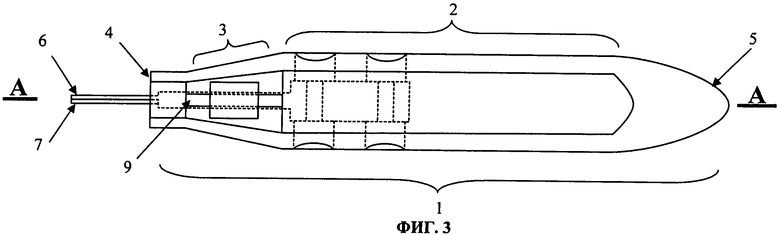
На фиг.3 - вид ножниц сверху.
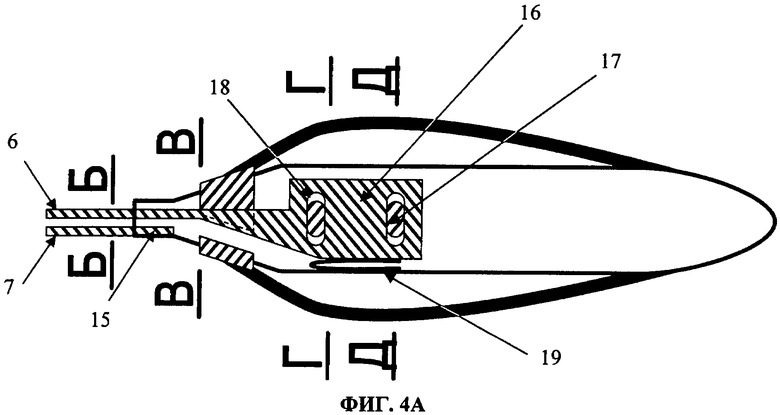
На фиг.4А - сечение ножниц вертикальной плоскостью А-А, проходящей через ось симметрии корпуса. Хвостовик 15 неподвижного ножа закреплен на внутренней поверхности корпуса 1 неподвижно. Фигура демонстрирует следующие варианты практической реализации деталей конструкции: соединение хвостовика 16 подвижного ножа с корпусом 1 выполнено посредством двух неподвижно закрепленных в корпусе направляющих сухарей 17, входящих в выполненные в хвостовике прорези 18; возвращение хвостовика 16 рабочего ножа в исходное положение осуществляется при помощи неподвижно закрепленной на внутренней поверхности корпуса пружины 19.
На фиг.4Б изображено сечение ножниц по пункту 1 формулы вертикальной плоскостью Б-Б, перпендикулярной продольной оси корпуса и проходящей через полотна ножей. На фигуре показаны рабочая часть 7 неподвижного ножа и рабочая часть 6 подвижного ножа.
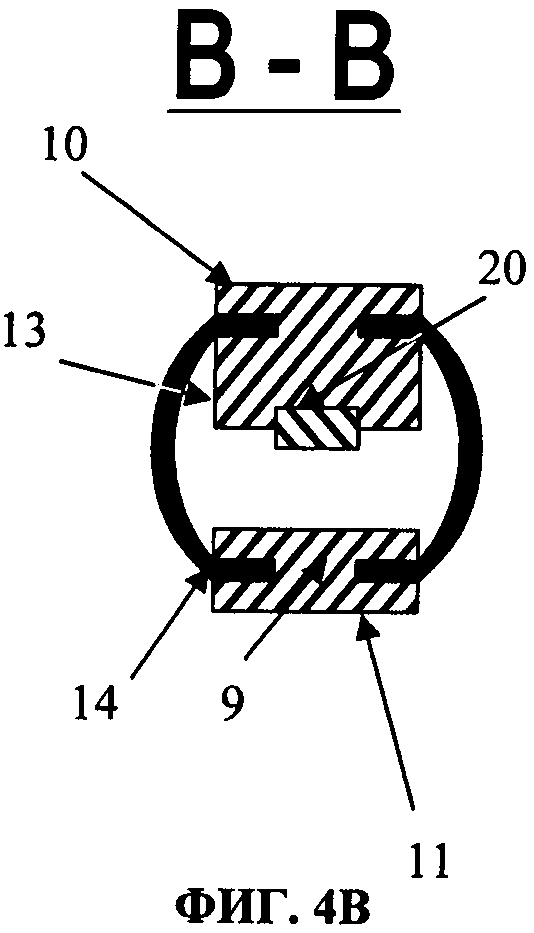
На фиг.4В изображено сечение ножниц вертикальной плоскостью В-В, перпендикулярной продольной оси корпуса и проходящей через ползуны. На фигуре показано, что каждый из ползунов 10 и 11 на каждой из двух своих боковых поверхностей 13 имеет по продольному пазу 14 и подвижно закреплен в прорези 9 соответствующей плоской поверхности 8 корпуса 1. Фигура демонстрирует вариант практической реализации деталей конструкции, в котором третий паз 20 рабочего ползуна 10 выполнен прямоугольным.
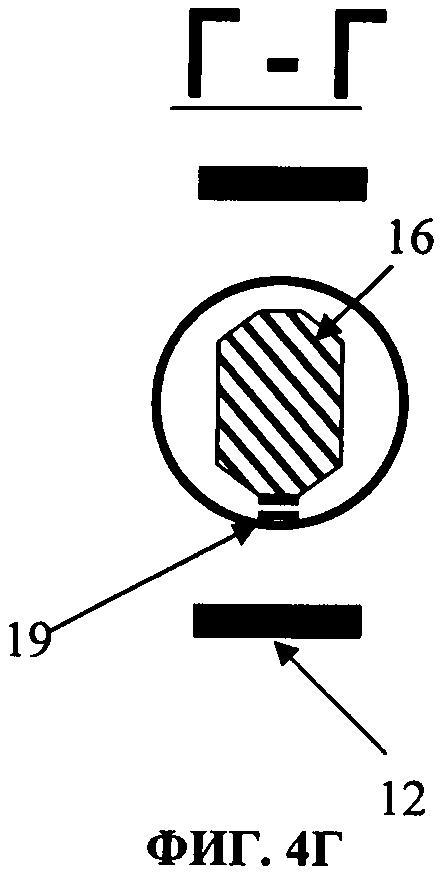
На фиг.4Г изображено сечение ножниц вертикальной плоскостью Г-Г, перпендикулярной продольной оси корпуса и проходящей через хвостовик 16 подвижного ножа. Фигура демонстрирует вариант практической реализации деталей конструкции, в котором возвращение хвостовика 16 рабочего ножа в исходное положение при прекращении нажима на рычаги 12 рукоятки осуществляется при помощи неподвижно закрепленной на внутренней поверхности корпуса пружины 19.
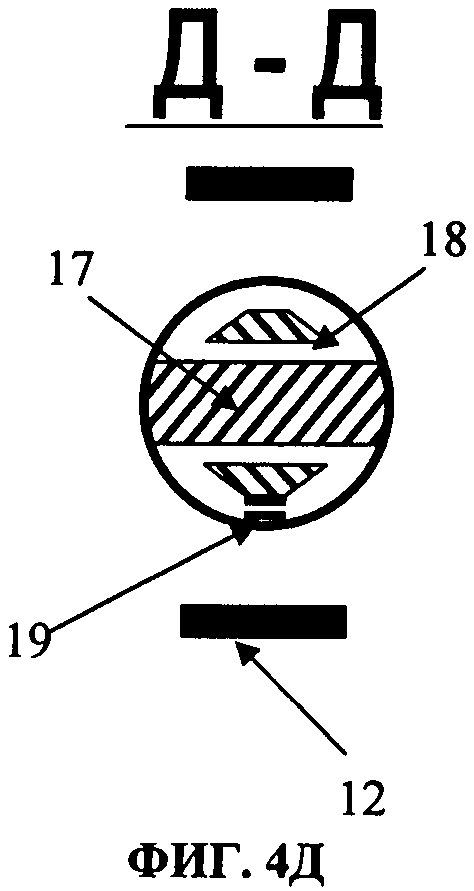
На фиг.4Д изображено сечение ножниц вертикальной плоскостью Д-Д, перпендикулярной продольной оси корпуса и проходящей через один из двух сухарей 17, служащих направляющими хвостовика подвижного ножа с прорезями 18. Фигура демонстрирует вариант практической реализации деталей конструкции, в котором возвращение хвостовика 16 рабочего ножа в исходное положение при прекращении нажима на рычаги 12 рукоятки осуществляется при помощи неподвижно закрепленной на внутренней поверхности корпуса пружины 19.
На фиг.5 показан вариант соединения хвостовика 16 подвижного ножа с корпусом 1 с помощью соединения «паз-гребень»: выполненные в корпусе 1 гребни 21 входят в пазы 22 хвостовика 16 подвижного ножа.
На фиг.6 показан вариант дополнительного механизма, обеспечивающего симметричность движения рычагов рукоятки. Дополнительные рычаги 23, шарнирно соединенные с рычагами 12 рукоятки, соединены друг с другом штифтом 24, перемещающимся в выполненных в стенках тела корпуса направляющих прорезях 25, причем оси направляющих прорезей 25 лежат в плоскости, перпендикулярной плоскости А-А.
На фиг.7 показан вариант реализации возвращения хвостовика 16 подвижного ножа в исходное положения с помощью третьего паза 20 рабочего ползуна 10, выполненного в форме паза «ласточкин хвост».
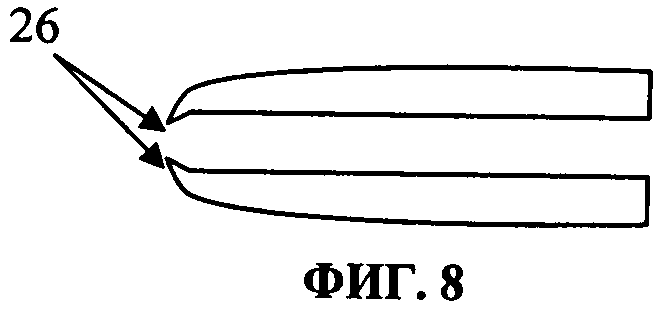
На фиг.8 изображен вид сбоку рабочих частей ножей по пункту 2 формулы. На конце каждого ножа выполнен зубец 26, лежащий в плоскости полотна ножа.
На фиг.9 изображено поперечное сечение рабочих частей ножей по пункту 3 формулы. Рабочая часть 7 неподвижного ножа имеет тавровый профиль, а рабочая часть 6 подвижного ножа имеет угловой профиль с углом в 90°.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕНОСНЫЕ ИМПУЛЬСНО-ТЕПЛОВЫЕ НОЖНИЦЫ | 2018 |
|
RU2696912C1 |
| Пиротехнические ножницы | 2023 |
|
RU2833324C2 |
| РУЧНЫЕ ГИДРАВЛИЧЕСКИЕ НОЖНИЦЫ | 2006 |
|
RU2314899C1 |
| СТРИГУЩАЯ ГОЛОВКА ЭЛЕКТРОБРИТВЫ | 1995 |
|
RU2103158C1 |
| НОЖНИЦЫ ДЛЯ РЕЗКИ ЛИСТОВОГО МАТЕРИАЛА | 1992 |
|
RU2025223C1 |
| Насадка-садовые ножницы | 1986 |
|
SU1412776A1 |
| РУЧНЫЕ ГИДРАВЛИЧЕСКИЕ НОЖНИЦЫ | 2000 |
|
RU2203166C2 |
| ПЕРЕНОСНЫЕ ПИРОТЕХНИЧЕСКИЕ НОЖНИЦЫ | 1994 |
|
RU2070483C1 |
| Механизированные комбинированные ручные ножницы | 1984 |
|
SU1306656A1 |
| РУЧНОЙ ГИДРАВЛИЧЕСКИЙ РЕЗАК | 1997 |
|
RU2121433C1 |




Изобретение относится к офтальмохирургии и может быть использовано для разрезания тканей глаза или интраокулярных имплантатов в случае необходимости удаления последних. Микрохирургические ножницы состоят из двух ножей и рукоятки в виде двух пружинящих рычагов. Ножницы дополнительно содержат полый корпус и рабочую часть. Рабочая часть сужена по направлению к рабочему концу корпуса. Ножи закреплены в корпусе так, что их полотна выступают из рабочей части корпуса. Режущие кромки ножей параллельны. Хвостовики ножей расположены внутри корпуса. Хвостовик одного ножа закреплен неподвижно. Хвостовик другого ножа установлен с возможностью возвратно-поступательного движения в поперечном направлении относительно корпуса в плоскости полотна ножа. Один из пружинящих рычагов является рабочим, а другой - холостым. Рабочий рычаг одним концом неподвижно закреплен снаружи на нерабочем конце корпуса. Другим концом, обращенным к рабочей части корпуса, рабочий рычаг соединен с механизмом, который преобразует возвратно-поступательное движение этого конца рычага вдоль корпуса в поперечное движение хвостовика подвижного ножа. Холостой рычаг одним концом неподвижно закреплен снаружи на нерабочем конце корпуса. Другим концом, обращенным к рабочей части корпуса, холостой рычаг соединен с механизмом, обеспечивающим при нажатии на рукоятку симметричность движения обоих рычагов. Хвостовик подвижного ножа может возвращаться в исходное положение при прекращении нажатия на рукоятку за счет упругости ее рычагов. Технический результат изобретения - снижение риска травматизации внутриглазных структур, сокращение времени хирургической операции, устранение эффекта «отталкивания», благодаря чему возникает возможность безопасного удаления акриловых интраокулярных линз и других интраокулярных имплантатов. 3 з.п. ф-лы, 9 ил.
1. Микрохирургические ножницы, состоящие из двух ножей и рукоятки в виде двух пружинящих рычагов, отличающиеся тем, что ножницы дополнительно содержат полый корпус, имеющий тело и рабочую часть, которая сужена по направлению к рабочему концу корпуса, ножи закреплены в корпусе так, что их полотна выступают из рабочей части корпуса, режущие кромки ножей параллельны, хвостовики ножей расположены внутри корпуса, хвостовик одного ножа закреплен неподвижно (неподвижный нож), хвостовик другого ножа установлен подвижно (подвижный нож) с возможностью возвратно-поступательного движения хвостовика этого ножа в поперечном направлении относительно корпуса в плоскости полотна ножа, один из пружинящих рычагов является рабочим, а второй - холостым, при этом рабочий рычаг одним концом неподвижно закреплен снаружи на нерабочем конце корпуса, а другим концом, обращенным к рабочей части корпуса, соединен с механизмом, преобразующим возвратно-поступательное движение этого конца рычага вдоль корпуса в поперечное движение хвостовика подвижного ножа, холостой рычаг одним концом неподвижно закреплен снаружи на нерабочем конце корпуса, а другим концом, обращенным к рабочей части корпуса, соединен с механизмом, обеспечивающим при нажатии на рукоятку симметричность движения обоих рычагов, при прекращении нажатия на рукоятку хвостовик подвижного ножа может возвращаться в исходное положение пассивно.
2. Микрохирургические ножницы по п.1, отличающиеся тем, что на конце режущей кромки каждого ножа выполнен зубец, лежащий в плоскости полотна ножа.
3. Микрохирургические ножницы по п.1, отличающиеся тем, что рабочая часть неподвижного ножа имеет тавровый профиль, центральное ребро которого снабжено режущей кромкой, а рабочая часть подвижного ножа имеет угловой профиль с углом в 90°, рабочая полка этого ножа снабжена режущей кромкой.
4. Микрохирургические ножницы по п.1, отличающиеся тем, что режущие кромки ножей выполнены зазубренными.
| TITAN MEDICAL Ltd, 2009, TMS 502 | |||
| Горный компас | 0 |
|
SU81A1 |
| US 5002554 А, 26.03.1991 | |||
| БЕЗВОДИЛЬНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2010 |
|
RU2442045C1 |
| Выкусыватель для операций на магистральных сосудах | 1985 |
|
SU1292750A1 |

