Область техники, к которой относится изобретение
Данное изобретение относится к способу и устройству для отвала пустой породы в пределах карьера.
Уровень техники
Существует множество математических моделей для открытой разработки карьеров с целью программирования выемки материала в различных частях карьера с учетом различных ограничений. Эти математические модели позволяют разрабатывать программы выемки, которые оптимизируют чистую текущую стоимость карьера в течение срока разработки карьера.
Обычно, карьер разделяют на несколько «блоков», которые являются обычно прямоугольными призмами материала, или агрегатов блоков, и разработку осуществляют в соответствии с заданной программой для максимизации чистой текущей стоимости карьера. Это включает удаление материала из карьера и направление материала в отвал, на хранение или обработку.
Обычно в конкретном регионе может разрабатываться несколько карьеров одновременно, и пустую породу обычно сваливают в удобном месте. Однако часто имеется ограниченное пространство для сваливания пустой породы, а также сваливание пустой породы может быть нежелательным с точки зрения охраны окружающей среды. Поэтому устранение пустой породы необходимо учитывать для оптимизации чистой текущей стоимости.
Сущность изобретения
Задачей данного изобретения является создание способа открытой разработки, который оптимизирует чистую текущую стоимость посредством включения сваливания пустой породы, а также устройства и программы для выполнения способа.
Задача решена с помощью способа открытой разработки со сваливанием пустой породы, заключающегося в том, что:
извлекают материал из открытого карьера и определяют, подлежит ли материал отправке на хранение, в отвал или обработку;
задают дорожную сеть, соединяющую несколько зон;
определяют перемещения пустой породы по сети от первоначальной зоны, в которой пустая порода получена, до зоны назначения, в которой пустая порода подлежит отвалу, для обеспечения совместной стратегии извлечения и перемещения пустой породы, которая оптимизирует чистую стоимость совместной программы извлечения и перемещения пустой породы; и
при этом каждая из зон содержит множество блоков, материал, извлекаемый из одного из блоков в зоне, отправляют в заданную точку входа в дорожную сеть, материал перемещают по дорожной сети и складывают материал пустой породы, по меньшей мере, на одном внешнем отвале пустой породы, и некоторый материал пустой породы перемещают по дорожной сети, заканчивающейся в одной из зон внутри карьера, и распределяют материал, перемещаемый к одной из зон внутри карьера, пропорционально отвалу пустой породы в карьере, заданной агрегатом повторного заполнения, который перекрывает зону, при этом агрегат повторного заполнения является пространством, образованным после извлечения материала из этого агрегата и поэтому очищенным от первоначального материала, и после полного повторного заполнения любого агрегата повторного заполнения, который расположен ниже этого агрегата.
Таким образом разрабатывается согласованная программа отвала материала и пустой породы, которая может учитывать экологические ограничения, где можно сваливать пустую породу, и с учетом этих ограничений создавать программу извлечения и отвала пустой породы, которая оптимизирует чистую текущую стоимость карьера.
Наиболее предпочтительно, что зона, в которой сваливается пустая порода, является зоной в карьере.
За счет перемещения пустой породы по дорожной сети к зоне внутри карьера, пустую породу можно перемещать из одного доступного пространства к другому доступному пространству внутри карьера на основе соображений разработки карьера и, в частности, того, какие последующие части карьера подлежат разработке.
Изобретение также относится к способу открытой разработки со сваливанием пустой породы, заключающегося в том, что:
извлекают материал из открытого карьера и определяют, какая доля извлеченного материала подлежит направлению в отвал;
задают дорожную сеть, имеющую множество узлов, при этом, по меньшей мере, некоторые из узлов задают точки входа во множество отвалов пустой породы, и при этом выбирают отвалы пустой породы из группы, состоящей, по меньшей мере, из одного отвала в карьере и, по меньшей мере, одного внешнего отвала пустой породы; и
перемещение материала, направляемого в отвал, по дорожной сети от места в карьере к входному узлу, относящемуся к одному из отвалов пустой породы, и отвал материала, направляемого в отвал, в отвале пустой породы, для обеспечения совместной стратегии извлечения и перемещения пустой породы, которая оптимизирует чистую стоимость совместной программы извлечения и перемещения пустой породы.
Стадия извлечения материала предпочтительно содержит извлечение материала на основе блочной модели программы извлечения, и при этом отвал пустой породы содержит отвал пустой породы в карьере, заданный пространством в карьере, которое определяют из одного или нескольких блоков блочной модели, которые уже подвергались извлечению.
В одном варианте выполнения пространство содержит агрегацию блоков, определяемую посредством агрегации множества блоков в блочную модель.
Форму пространств предпочтительно выбирают с возможностью обеспечения независимой программы для пространств для повторного заполнения пустой породой с учетом предшествующих правил без нарушения ограничений максимального наклона отвала пустой породы.
Карьер предпочтительно разделяют на множество зон, при этом каждая зона содержит множество блоков и возможных пространств повторного заполнения, которые образуют отвалы в карьере.
В одном варианте осуществления способ заключается в том, что перемещают пустую породу из зоны в карьере по дорожной сети на внешний отвал пустой породы и возможно из этого внешнего отвала пустой породы на отвал пустой породы в карьере.
Стоимость извлечения материала и его перемещения в отвал предпочтительно определяют с учетом зоны, из которой пустую породу удаляют в карьере, пути перемещения пустой породы по дорожной сети через узлы и до отвала пустой породы, на котором сваливают пустую породу.
Карьер предпочтительно разделен на множество зон, при этом каждая зона содержит множество блоков, материал, извлеченный из одного из блоков в зоне, направляют к заданной входной точке дорожной сети, перемещают материал по дорожной сети и сваливают материал пустой породы, по меньшей мере, на одном внешнем отвале пустой породы, и при этом некоторый материал пустой породы перемещают по дорожной сети, заканчивающейся у одной из зон внутри карьера, и распределяют материал, перемещаемый к одной из зон внутри карьера, пропорционально отвалу пустой породы в карьере, заданной агрегатом повторного заполнения, который перекрывает эту зону, при этом агрегат повторного заполнения является пространством, образованным после извлечения материала из этого агрегата и поэтому очищенным от первоначального материала, и после полного повторного заполнения любого агрегата повторного заполнения, который расположен ниже этого агрегата.
Задача изобретения выполнена также с помощью устройства для планирования открытой разработки с отвалом пустой породы, при этом материал извлекается из открытого карьера и определяется, в какой пропорции извлеченный материал подлежит отправке в отвал, при этом предусмотрена дорожная сеть, имеющая множество узлов, по меньшей мере, некоторые из узлов задают входные точки к множеству отвалов пустой породы, и при этом отвалы пустой породы выбираются из группы, состоящей, по меньшей мере, из одного отвала в карьере и, по меньшей мере, одного внешнего отвала пустой породы; и материал, направляемый в отвал, перемещается по дорожной сети от места в карьере к входному узлу, относящемуся к одному отвалу пустой породы, и материал, направляемый в отвал, сваливается в отвал пустой породы, при этом устройство содержит:
процессор для разделения карьера на множество зон и для выделения материала, подлежащего перемещению в одну из зон внутри карьера, пропорционально отвалу пустой породы в карьере, заданной агрегатом повторного заполнения, который перекрывает эту зону, при этом агрегат повторного заполнения является пространством, образованным после извлечения материала из этого агрегата и поэтому очищенным от первоначального материала, и после полного повторного заполнения любого агрегата повторного заполнения, который расположен ниже этого агрегата, для обеспечения за счет этого совместной стратегии извлечения и перемещения пустой породы, которая оптимизирует чистую стоимость совместной программы извлечения и перемещения пустой породы.
Задача изобретения решена также с помощью компьютерной программы для программирования открытой разработки с отвалом пустой породы, при этом материал извлекается из карьера и некоторая доля извлеченного материала подлежит направлению в отвал, содержащая:
код для задания дорожной сети, имеющей множество узлов, при этом, по меньшей мере, некоторые из узлов задают входные точки к множеству отвалов пустой породы, и при этом отвалы пустой породы выбираются из группы, состоящей, по меньшей мере, из одного отвала в карьере и, по меньшей мере, одного внешнего отвала пустой породы, так что материал, направляемый в отвал, перемещается по дорожной сети от места в карьере к входному узлу, относящемуся к одному из отвалов пустой породы, и материал, направляемый в отвал, сваливается в отвал пустой породы;
код для разделения карьера на множество зон, при этом каждая зона содержит множество блоков, так что материал, извлеченный из одной из зон, направляется к заданной входной точке дорожной сети, перемещается по дорожной сети и сваливается, по меньшей мере, на одном внешнем отвале пустой породы, и некоторое количество материала направляется по дорожной сети, заканчивающейся у одной из зон внутри карьера; и
код для распределения материала, подлежащего перемещению в одну из зон внутри карьера, пропорционально отвалу пустой породы в карьере, заданной агрегатом повторного заполнения, который перекрывает эту зону, при этом агрегат повторного заполнения является пространством, образованным после извлечения материала из этого агрегата и поэтому очищенным от первоначального материала, и после полного повторного заполнения любого агрегата повторного заполнения, который расположен ниже этого агрегата, для обеспечения за счет этого совместной стратегии извлечения и перемещения пустой породы, которая оптимизирует чистую стоимость совместной программы извлечения и перемещения пустой породы.
Программа предпочтительно дополнительно содержит код для программирования извлечения материала, основанного на блочной модели программы извлечения, и код для определения отвала пустой породы в карьере, заданного пространством в карьере, которое определяется из одного или нескольких блоков блочной модели, которые уже подвергались извлечению.
Программа предпочтительно дополнительно содержит код для определения стоимости извлечения материала и его перемещения в отвал с учетом зоны, в которой пустая порода извлечена в карьере, пути перемещения пустой породы по дорожной сети через узлы к отвалу пустой породы, на котором сваливается пустая порода.
Краткое описание чертежей
Ниже приводится в качестве примера подробное описание предпочтительных вариантов выполнения изобретения со ссылками на прилагаемые чертежи, на которых изображено:
фиг. 1 - открытый карьер и дорожная сеть, согласно одному варианту выполнения изобретения, на виде сверху;
фиг. 2 - один из карьеров, показанных на фиг. 1, на виде сбоку;
фиг. 3 - другой из карьеров, показанный на фиг. 1, на виде сбоку;
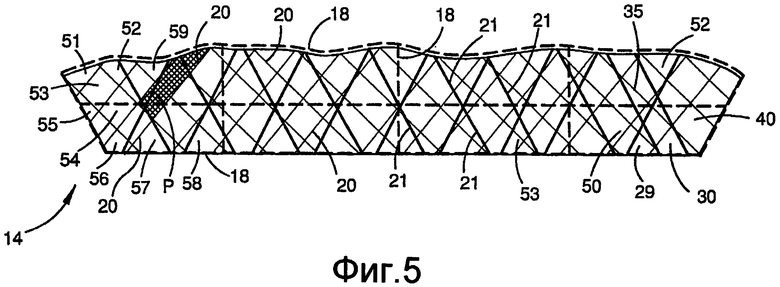
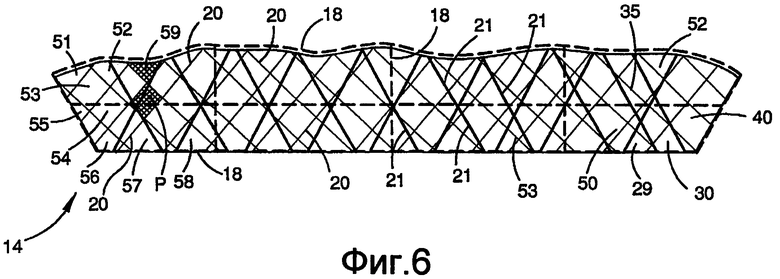
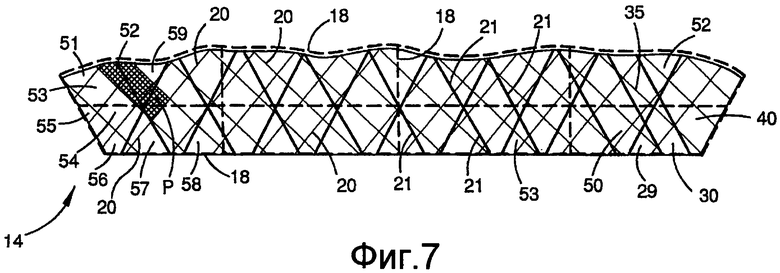
фиг. 4 - 7 - виды, аналогичные фиг. 2, но показывающие детально агрегаты, которые извлечены для разработки материала в точке Р в карьере; и
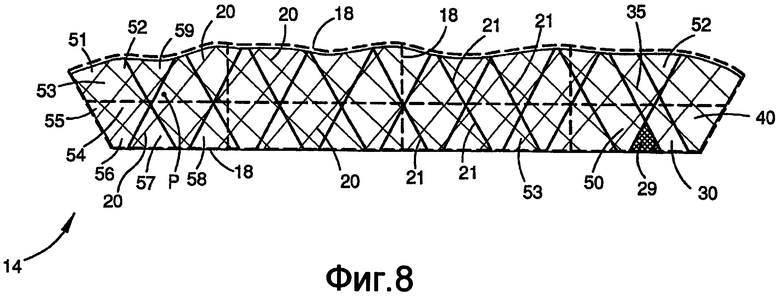
фиг. 8 - 15 - виды, аналогичные фиг. 2, показывающие повторное заполнение агрегатов для обеспечения сваливания пустой породы в карьере.
Подробное описание предпочтительных вариантов выполнения
Оптимизация стратегического планирования разработки карьера связана с принятием решения, когда необходимо программировать извлечение блоков (или агрегатов) руды в месторождении руды в течение срока разработки при одновременном соблюдении всех геотехнических ограничений наклона и условий разработки, и пропускной способности обработки. Обычно определяется программа извлечения, которая разделяет карьер (т.е. зону, из которой подлежит извлечению материал) в блочную модель, содержащую обычно между 10000 и 20000 блоков или агрегатов. Обычно выполняется определение оптимальных конечных границ карьера для совокупного извлечения руды по всем блочным моделям, введенным пользователем. Эти границы используются для ограничения комплекта блоков, рассматриваемых для выполнения детального годового плана извлечения материала. Различные блочные модели разделяются на агрегаты, так что пользователь имеет меру контроля количества таких агрегатов. Предшествующая структура этих агрегатов достается по наследству от предшествующих соотношений составляющих их блоков, и полученные предшествующие правила распространяются на агрегаты.
Эти агрегаты можно подразделять на более мелкие агрегаты, обычно называемые бункерами. Решение об извлечении агрегата приводит к извлечению каждого бункера внутри агрегата, однако процессор все еще имеет свободу выбора отдельных решений по обработке для каждого из составляющих бункеров. Пользователь задает бункеры так, чтобы максимизировать гибкость обработки материала внутри агрегатов.
Используя пример разработки железной руды, типичный бункер является совокупностью жесткого накладного материала в агрегате, который имеет долю железа между 57% и 60% и долю кремнезема менее 1,5%. Обычно в каждом агрегате имеется между 10 и 20 бункеров.
Эти агрегаты и бункеры планируют по сроку разработки карьера так, чтобы максимизировать чистую текущую стоимость при одновременном учете пропускной способности карьера, пропускной способности обработки, емкости рынка, а также ограничений наклона.
Принцип предпочтительного варианта выполнения изобретения для открытой разработки карьера с отвалом пустой породы в карьере состоит в том, что один и тот же путь, по которому горная порода транспортируется при удалении из грунта, можно использовать также для транспортировки горной породы, которая возвращается в грунт. В частности, каждый блок в блочной модели занимает позицию в пространстве, так что имеются переменные 0, 1 в виде y(j,t)=1, если и только если блок j разрабатывался в или перед периодом t, имеются переменные 0, 1 в виде w(j,t), при w(j,t)=1, если и только если место, занимаемое блоком j, повторно заполнялось пустой породой в или перед периодом t. Предшествующие ограничения обеспечиваются с помощью w(j,t) для кодирования ограничений наклона для сваливаемой пустой породы, т.е. место блока j не может быть повторно заполнено в период t, пока не заполнены также различные другие места в период t (либо поскольку они были сами повторно заполнены пустой породой в или перед периодом t, либо поскольку они никогда не извлекались в первом случае).
Место, в котором образуется пустая порода, предпочтительно отслеживается от каждого места j с переменными в виде u (j, k, t), обозначающим тонны пустой породы из места j, которые сваливаются в месте k в период t. Источник пустой породы, подлежащей отвалу в месте k является релевантным, поскольку определяет стоимость транспортировки. Посредством разделения каждого карьера на сеть соединенных друг с другом зон, число переменных уменьшается, что делает проблему отслеживания пустой породы выполнимой.
Таким образом, необходимо лишь ввести переменные u (p, q, t) для зон p и q, которые являются смежными друг с другом, а также стоимость, связанную с перемещением материала между ними, и процессор затем определяет наилучший маршрут от источника к месту назначения через эти элементарные перемещения из зоны в смежную зону.
Каждая зона карьера предпочтительно удовлетворяет ограничениям баланса масс, которые обеспечивают, что количество пустой породы, добываемой в извлекаемых группах, которые пересекают зону, плюс количество пустой породы, транспортируемой в зону извне, равно количеству пустой породы, сваливаемой в зоне, плюс количество пустой породы, транспортируемой из зоны. Процессор принимает решение, как распределять объем пустой породы, предназначенной для сваливания в зоне, на различные глыбы повторного заполнения, которые пересекают зону. Пока обеспечивается, что не имеются не положительные по стоимости циклы в сети, каждое оптимальное решение этой подпроблемы потока в сети можно раскладывать на маршрутные потоки от мест, в которых получают пустую породу, к местам, в которых пустая порода сваливается.
Зоны необязательно должны быть подмножествами карьеров. Зона может быть местом вдоль дороги (в этом случае пустая порода не добывается и не сваливается здесь), или же внешним отвалом пустой породы. Таким образом, процессор может правильно определять стоимость перемещений по дорожной сети карьера, а также к и от внешнего отвала пустой породы.
Одна из принципиальных трудностей указанного выше подхода состоит в том, что наложение предшествующих ограничений на пространства повторного заполнения требует бинарную переменную для каждой «группы повторного заполнения» и каждого периода. Это по существу удваивает число целочисленных переменных, которые следует учитывать при оптимизации.
Для уменьшения числа целочисленных переменных предпочтительно решать проблему в следующих двух фазах.
В первой фазе предшествующие ограничения для групп повторного заполнения моделируются приблизительно с помощью непрерывных переменных. Ограничение может гласить, что ни одна группа повторного заполнения не может быть более полной, чем ее предшественники. Важным является то, что хотя эти предшествующие ограничения не полностью охватывают реалии предшествующих соотношений внутри модели (например, группа повторного заполнения вообще не может появляться, пока не будут полностью заполнены ее предшественники), но в действительности они гарантируют, что существует действенное предшествующее соотношение. То есть, хотя переменные, которые представляют долю группы повторного заполнения, заполняемую в конкретное время t, могут не описывать какую-то возможную реальность, тем не менее возможное решение этой упрощенной модели указывает, что существует некоторый истинно возможный план отвала (для не упрощенной модели), который совместим с планом извлечения, возвращаемым с помощью решения к упрощенной модели. Объяснением этому является то, что может быть невозможно наполовину заполнять пространство, которое расположено над пространством, которое заполнено лишь наполовину, однако можно, тем не менее, представить, что материал, сваленный в воздух в этом более высоком пространстве, просто упадет в нижнее пространство.
С учетом решения для «фазы 1» проблемы, можно решить «фазу 2» проблемы тем, что извлечение следует (или следует приблизительно) плану, определенному в фазе 1 (за счет чего проблема упрощается и позволяет осуществлять неупрощенную версию предшествующих ограничений), и процессор находит наилучшее истинно возможное решение проблемы планирования отвала пустой породы, которое является совместимым с планом извлечения.
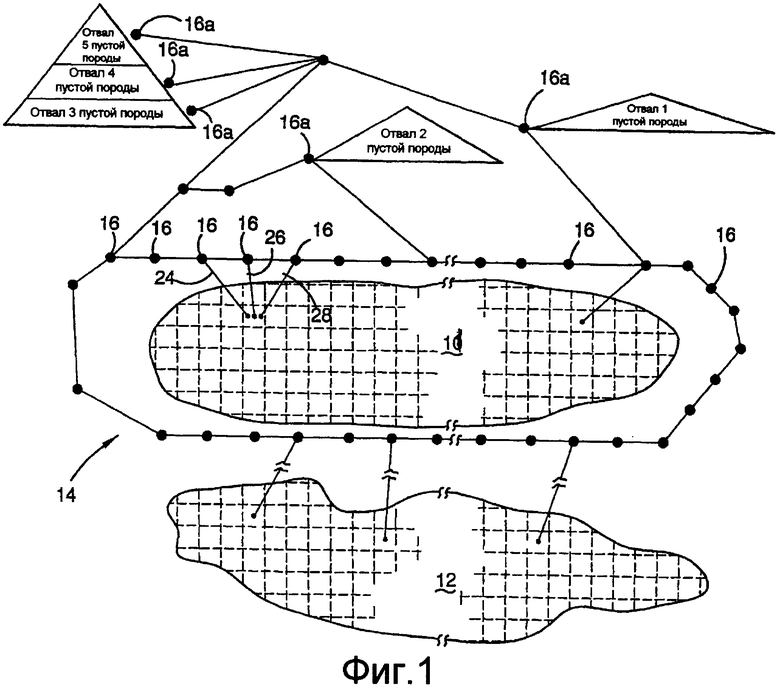
На фиг. 1 показаны на виде сверху два карьера 10 и 12, соединенные друг с другом дорожной сетью 14 с множеством узлов 16, заданных вдоль дорожной сети 14. Понятно, что карьеры 10 и 12 могут быть на большом расстоянии друг от друга, а дорожная сеть 14 может быть экстремально длинной. Дорожная сеть 14 имеет множество отвалов пустой породы, обозначенных отвал 1 пустой породы до отвала 5 пустой породы, при этом каждый отвал пустой породы имеет связанный с ней входной узел 16а.
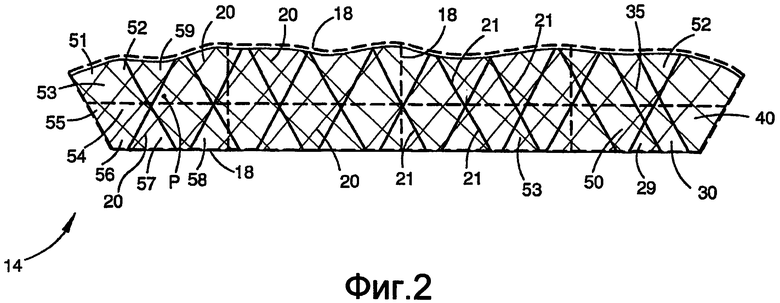
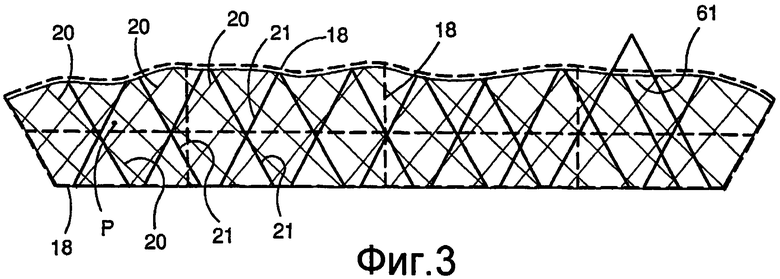
На фиг. 2 и 3 показаны карьеры 10 и 12 соответственно на виде сбоку.
Каждый карьер 10 и 12, как показано на фиг. 2 и 3, разделен границами зон пустой породы, показанными прерывистыми линиями 18 (лишь некоторые из них обозначены позицией 18) на фиг. 2 и 3. Карьер имеет также множество границ агрегатов исходного материала, которые задают блоки или агрегаты блоков, как показано тонкими черными линиями 20 (лишь некоторые из них обозначены позицией 20) на фиг. 2 и 3. Карьер также разделен на множество пространств агрегатов повторного заполнения, которые заданы границами, проведенными толстыми черными линиями 21 (лишь некоторые из них обозначены) на фиг. 2 и 3. Подлежащий извлечению из карьеров материал извлекается в соответствии с моделями блочного планирования, указанными выше, и некоторое количество материала идет на обработку, некоторое количество на хранение для возможной дополнительной обработки, и некоторое количество материала идет в отвал. В некоторых случаях хранение не используется и материал идет либо на обработку, либо в отвал.
Первоначально, в первые годы разработки карьера, пустая порода идет на внешние отвалы 1-5 пустой породы, поскольку пространство не очищено в карьерах 10 и 12 для отвалов пустой породы в карьере. Однако, по мере извлечения материала из карьера, границы 21 повторного заполнения задают открытые пространства, в которые можно сваливать материал пустой породы.
Обычно, стоимость, связанная с перемещением материала пустой породы от точки его извлечения в карьере до одного из внешних отвалов пустой породы, а затем к конечному отвалу пустой породы в карьере или же непосредственно к конечному отвалу в карьере, определяется маршрутом, по которому следует пустая порода для перемещения от места ее извлечения к внешнему отвалу пустой породы или к отвалу пустой породы в карьере. Этот маршрут задается узлами 16 и поэтому число пересекаемых узлов 16 определяет стоимость перемещения пустой породы. Каждый из узлов 16 дорожной сети 14 задается номером узла, номером дороги и номером места на этой дороге. Один и тот же номер узла может быть связан с несколькими дорогами (это указывает на пересечение двух дорог в этой точке). Места вдоль одной любой дороги имеют последовательные номера, начиная с единицы. Стоимость единицы расстояния вперед (т.е. до следующего номера места на одной и той же дороге) и назад задается для каждой дороги внутри сети, и внешним отвалам пустой породы придается место в сети (идентифицируемое с помощью входного узла 16а).
Для каждого блока в блочной модели пользователь может назначать до трех возможных входных точек 24, 26, 28, показанных на фиг. 1, для входа получаемой в этом блоке пустой породы в дорожную сеть 14, вместе с соответствующей стоимостью получения доступа кубического метра пустой породы в дорожную сеть 14. Входы из карьеров 10 и 12 в сеть 14 показаны единственной линией для простоты иллюстрации. Однако можно считать наоборот, что эти входные точки служат также в качестве выходных точек, из которых материал пустой породы на дорожной сети можно сваливать обратно в пространство, занимаемое этим блоком, и указывается также соответствующая стоимость в долларах за кубический метр.
Однако для облегчения отслеживания, перемещение пустой породы не отслеживается на уровне блоков. Вместо этого, для облегчения возможности отслеживания, перемещение пустой породы отслеживается на уровне зон, заданных границами 18 зон, показанными на фиг. 1-3. Зоны, заданные границами 18, выбираются так, что два блока могут принадлежать лишь единственной зоне, если они соединены с одной и той же дорогой или дорогами в сети 14. Для каждой дороги, с которой связан блок в зоне, все блоки внутри зоны рассматриваются как связанные с усредненными местами дороги составляющих блоков и с усредненной величиной соответствующей стоимости. Другими словами, для каждого блока в одной зоне одна и та же стоимость связывается с перемещением пустой породы на дорожную сеть 14.
Поэтому в предпочтительном варианте выполнения данного изобретения предусматриваются три различных типа агрегации, а именно:
агрегация блоков в агрегаты извлечения и бункеры;
агрегация пространства, занимаемого блоками, в пространства агрегации повторного заполнения;
агрегация пространства, занимаемого блоками, в зоны пустой породы.
Эти агрегации можно задавать независимо друг от друга и тем самым одна зона может перекрывать несколько агрегаций извлечения, а также несколько агрегаций повторного заполнения.
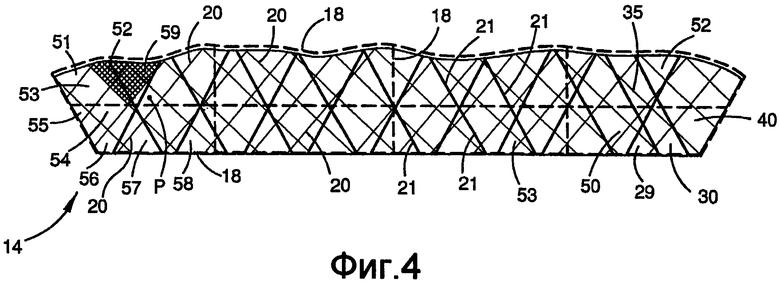
Оптимизированная программа извлечения и отвала пустой породы может быть направлена на извлечение материала, идентифицированного в точке Р на фиг. 2. Для этого агрегаты, первоначально извлеченные, показаны на фиг. 4 и перекрестно заштрихованы. Затем извлекаются дополнительные агрегаты, показанные на фиг. 5 и перекрестно заштрихованные, для извлечения материала в точке Р. В качестве альтернативного решения, программа может лишь определять, что сумма двух комплектов агрегатов, показанных на фиг. 4 и 5, извлекается в одной операции, вместо двух операций, указанных выше.
Ограничения наклона предотвращают извлечение агрегатов, показанных на фиг. 6 и 7, в качестве исходной стадии, поскольку оно может приводить к наклонам, которые могут вызывать оползень или оседание.
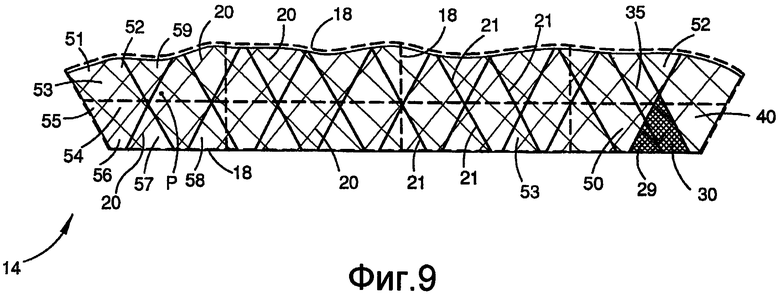
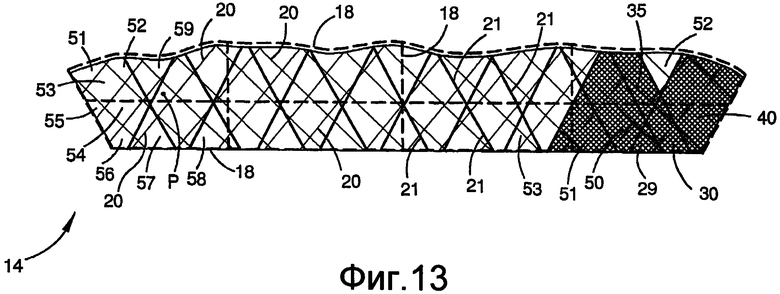
Как показано на фиг. 2 и 3, агрегаты 30, 35, 40 и 50 повторного заполнения являются пространствами, которые можно заполнять материалом пустой породы. Агрегаты 30, 35, 40 и 50 повторного заполнения сконструированы из входной блочной модели посредством агрегирования пространства, занимаемого блоками в блочной модели (возможно включающей воздушные блоки), в отдельные пространства. Специальная форма этих агрегатов 30, 35, 40 и 50 выбрана так, чтобы обеспечивать возможность повторного заполнения агрегатов по независимой программе с учетом предшествующих правил и без нарушения ограничений углов естественного откоса. Эти ограничения могут устанавливаться пользователем и могут содержать лишь максимальные углы наклона для пустой породы при сваливании в пространства.
Например, если пространство, занятое некоторым составляющим блоком в агрегате 30 повторного заполнения, должно быть повторно заполнено перед пространством, занятым некоторым составляющим блоком в агрегате 40 повторного заполнения, то, согласно предпочтительному варианту выполнения изобретения, всегда не будет иметься составляющий блок в агрегате 40 повторного заполнения, который должен быть повторно заполнен перед пространством, занимаемым любым составляющим блоком в агрегате 30 повторного заполнения. Поэтому достаточно наложить предшествующее правило, что агрегат 30 повторного заполнения должен быть полностью заполнен, прежде чем можно выполнять отвал в агрегат 40 повторного заполнения, поскольку форма агрегата 30 такова, что агрегат 30 можно действительно заполнять перед инициированием любого отвала в агрегат 40. Агрегат 35 повторного заполнения рассматривается как недоступный для отвала, пока все агрегаты извлечения, которые перекрывают агрегат 35 заданным радиусом, не будут очищены от своего первоначального материала и пока не будут полностью повторно заполнены все предшествующие ему агрегаты повторного заполнения (такие как агрегаты 30, 40 и 50).
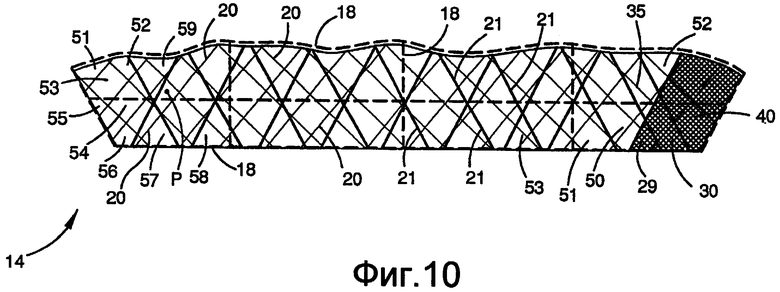
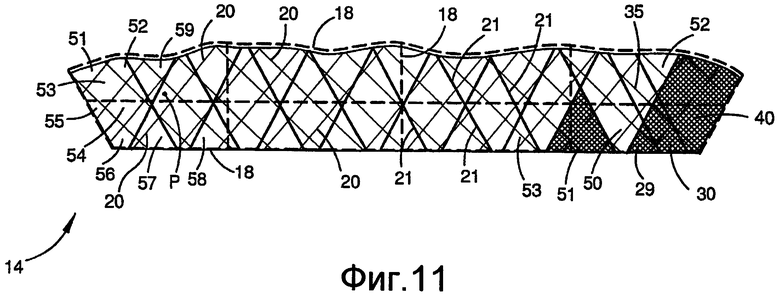
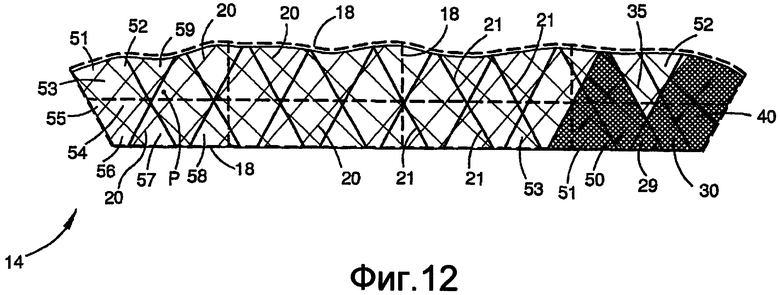
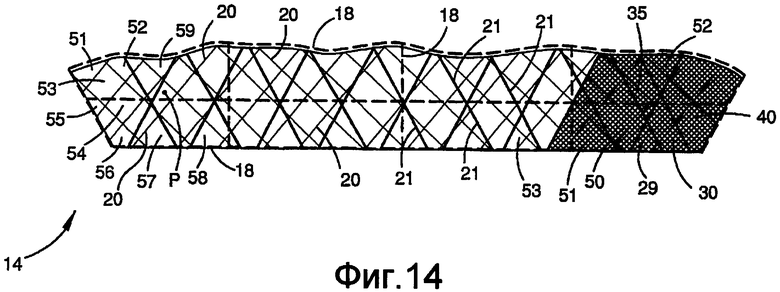
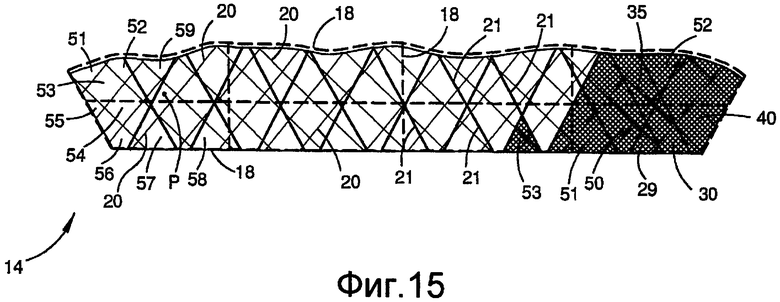
На фиг. 8-15 показаны пространства повторного заполнения, повторно заполняемые последовательно, при этом пространство 29 повторно заполняется первым (смотри фиг. 9), затем повторно заполняется пространство 40 (смотри фиг. 10) с последующим повторным заполнением пространства 51 (смотри фиг. 11), затем пространства 50 (смотри фиг. 12), затем пространства 35 (смотри фиг. 13) и затем пространства 52 (смотри фиг. 14), и затем пространства 53 (смотри фиг. 15). Следует отметить, что эта последовательность приведена лишь в качестве примера, и отвал пустой породы в агрегаты повторного заполнения можно осуществлять по отличной программе, в зависимости от доступного пространства, при сохранении ограничений наклона с целью обеспечения оптимальной чистой текущей стоимости карьера с учетом как извлечения материала из карьера, так и отвала пустой породы.
Агрегат 61 повторного заполнения может проходить над первоначальным уровнем грунта карьера, как показано на фиг. 3.
В другом варианте выполнения изобретения дополнительные ограничения относятся к заполнению блоков, которые расположены ниже горизонта грунтовых вод карьера. В этом варианте выполнения весь агрегат повторного заполнения, содержащий блок, расположенный ниже горизонта грунтовых вод, необходимо повторно заполнять, и для этого эти агрегаты повторного заполнения разделяются у горизонта грунтовых вод, так что не требуется выполнять отдельное повторное заполнение. Для удовлетворения этого ограничения, материал может быть возвращен из внешнего отвала пустой породы в последний год срока службы карьера и перемещен по дорожной сети 14 обратно в карьеры.
Поскольку модификации внутри идеи и объема изобретения могут легко осуществляться специалистами в данной области техники, то понятно, что данное изобретение не ограничивается частными вариантами выполнения, указанными выше в качестве примера.
В последующей формуле изобретения и в предшествующем описании изобретения, за исключением случаев, когда контекст требует другого за счет языкового выражения или необходимого осуществления, слово «содержат» или вариации, такие как «содержит» или «содержащий», используется во включительном смысле, т.е. для указания присутствия указанных признаков, но без исключения присутствия или добавления других признаков в различных вариантах выполнения изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2008 |
|
RU2367793C1 |
| СПОСОБ РЕКУЛЬТИВАЦИИ НАРУШЕННЫХ ЗЕМЕЛЬ | 2008 |
|
RU2374447C1 |
| СПОСОБ ИЗОЛЯЦИИ ПОДЗЕМНЫХ ГОРНЫХ РАБОТ ПРИ ОТКРЫТОПОДЗЕМНОЙ РАЗРАБОТКЕ | 2000 |
|
RU2186974C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЫРАБОТАННЫХ КАРЬЕРОВ ДЛЯ СТРОИТЕЛЬСТВА КЛАДБИЩА-МУЗЕЯ | 2010 |
|
RU2448252C1 |
| СПОСОБ ОТРАБОТКИ ГЛУБОКИХ КАРЬЕРОВ | 2000 |
|
RU2199664C2 |
| СПОСОБ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2008 |
|
RU2367794C1 |
| СПОСОБ ПОДГОТОВКИ И ЗАХОРОНЕНИЯ РАДИОАКТИВНЫХ ОТХОДОВ (РАО) | 2012 |
|
RU2537815C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЫРАБОТАННЫХ КАРЬЕРОВ ДЛЯ СТРОИТЕЛЬСТВА КЛАДБИЩА-МУЗЕЯ | 2010 |
|
RU2448251C1 |
| КОМБИНИРОВАННЫЙ СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ УЗКИХ ВЫТЯНУТЫХ ГОРИЗОНТАЛЬНЫХ И СЛАБОНАКЛОННЫХ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 1992 |
|
RU2016196C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КАЛЕНДАРНОГО ПЛАНИРОВАНИЯ ИЗВЛЕЧЕНИЯ РЕСУРСА | 2005 |
|
RU2384707C2 |
Изобретение относится к способу и устройству для отвала пустой породы в пределах карьера. Техническим результатом является снижение количества отвала пустой породы. Способ задает дорожную сеть, имеющую множество узлов, при этом, по меньшей мере, некоторые из узлов задают точки входа во множество отвалов пустой породы. Отвалы пустой породы являются либо отвалами пустой породы в карьере, либо внешними отвалами пустой породы. Материал пустой породы перемещают по дорожной сети от места в карьере до входного узла, относящегося к одному из отвалов пустой породы, и сваливают в отвал пустой породы. Материал может перемещаться из внешних отвалов пустой породы на отвалы пустой породы в карьере. Отвалы пустой породы в карьере определяют из блочной модели, обеспечивающей совместную программу извлечения и повторного заполнения, и определяют пространства агрегатов повторного заполнения, которые содержат агрегаты блоков, которые уже разработаны, так что материал удален из этих блоков, с заданием пространства агрегатов повторного заполнения, которые затем являются доступными для использования в качестве отвала пустой породы для возвращения материала пустой породы в карьер. 4 н. и 13 з.п. ф-лы, 15 ил.
1. Способ открытой разработки с отвалом пустой породы, заключающийся в том, что:
извлекают материал из открытого карьера и определяют, подлежит ли материал отправке на хранение, в отвал или обработку;
задают дорожную сеть, соединяющую множество зон;
определяют с помощью процессора перемещение пустой породы по сети от первоначальной зоны, в которой пустая порода получена, до зоны назначения, в которой пустая порода подлежит отвалу, и
при этом каждая из зон содержит множество блоков, материал, извлекаемый из одного из блоков в зоне, отправляют в заданную точку входа в дорожную сеть, материал перемещают по дорожной сети и складывают материал пустой породы, по меньшей мере, на одном внешнем отвале пустой породы, как это определено с помощью процессора, а некоторый материал пустой породы, определенный с помощью процессора, перемещают по дорожной сети, заканчивающейся в одной из зон внутри карьера, и с помощью процессора распределяют материал, перемещаемый к одной из зон внутри карьера, пропорционально отвалу пустой породы в карьере, заданной агрегатом повторного заполнения, который перекрывает зону, при этом агрегат повторного заполнения является пространством, образованным после извлечения материала из этого агрегата и поэтому очищенным от первоначального материала, и после полного повторного заполнения любого агрегата повторного заполнения, который расположен ниже этого агрегата, и совместно оптимизируют извлечение материала и перемещение пустой породы с помощью процессора для оптимизации чистой стоимости совместной программы извлечения и перемещения пустой породы.
2. Способ по п.1, в котором некоторый материал пустой породы, определенный с помощью процессора, сваливают также в зоне в карьере.
3. Способ по п.1, в котором совместная оптимизация извлечения материала и планирование перемещения пустой породы содержит процессор, учитывающий предшествующие ограничения.
4. Способ по п.1, в котором совместная оптимизация извлечения материала и планирование перемещения пустой породы содержит использование процессора, определяющего порядок, в котором блоки материала удаляют из карьера, и порядок, в котором пространство, соответствующее предыдущим извлеченным блокам, заполняют повторно.
5. Способ открытой разработки с отвалом пустой породы, заключающийся в том, что:
извлекают материал из открытого карьера и определяют, какая доля извлеченного материала подлежит направлению в отвал;
задают дорожную сеть, имеющую множество узлов, при этом, по меньшей мере, некоторые из узлов задают точки входа во множество отвалов пустой породы, и при этом выбирают отвалы пустой породы из группы, состоящей, по меньшей мере, из одного отвала в карьере и, по меньшей мере, одного внешнего отвала пустой породы; и
перемещают материал, направляемый в отвал, по дорожной сети от места в карьере к входному узлу, относящемуся к одному из отвалов пустой породы, как это определено с помощью процессора, и сваливают материал, направляемый в отвал, на отвал пустой породы, как это определено с помощью процессора, и
совместно оптимизируют извлечение материала и перемещение пустой породы с помощью процессора для обеспечения совместной стратегии извлечения и перемещения пустой породы, которая оптимизирует чистую стоимость совместной программы извлечения и перемещения пустой породы.
6. Способ по п.5, в котором совместная оптимизация извлечения материала и планирование перемещения пустой породы содержит использование процессора, учитывающего предшествующие ограничения.
7. Способ по п.5, в котором стадия извлечения материала содержит извлечение материала на основе блочной модели плана извлечения, и при этом отвал пустой породы содержит отвал пустой породы в карьере, заданный пространством в карьере, которое определяют с помощью процессора из одного или нескольких блоков блочной модели, которые уже подвергались извлечению.
8. Способ по п.7, в котором пространство содержит агрегацию блоков, определяемую с помощью процессора посредством агрегации множества блоков в блочную модель.
9. Способ по п.7, в котором форму пространств выбирают с помощью процессора с возможностью обеспечения независимой программы для пространств для повторного заполнения пустой породой с учетом предшествующих правил без нарушения ограничений максимального наклона отвала пустой породы.
10. Способ по п.5, в котором карьер разделяют с помощью процессора на множество зон, при этом каждая зона содержит множество блоков и возможных пространств повторного заполнения, которые образуют отвалы в карьере.
11. Способ по п.10, дополнительно содержащий перемещение пустой породы как это определено с помощью процессора из зоны в карьере по дорожной сети на внешний отвал пустой породы и возможно из этого внешнего отвала пустой породы на отвал пустой породы в карьере.
12. Способ по п.11, в котором стоимость извлечения материала и его перемещения в отвал определяют с помощью процессора с учетом зоны, из которой пустую породу удаляют в карьере, пути перемещения пустой породы по дорожной сети через узлы и до отвала пустой породы, на который сваливают пустую породу.
13. Способ по п.5, в котором карьер разделен с помощью процессора на множество зон, при этом каждая зона содержит множество блоков, материал, извлеченный из одного из блоков в зоне, направляют к заданной входной точке дорожной сети, перемещают материал по дорожной сети, как это определено с помощью процессора, и сваливают материал пустой породы, по меньшей мере, на одном внешнем отвале пустой породы, как это определено с помощью процессора, и при этом некоторое количество материала пустой породы перемещают по дорожной сети, заканчивающейся у одной из зон внутри карьера, как это определено с помощью процессора, и с помощью процессора распределяют материал, перемещаемый к одной из зон внутри карьера, пропорционально отвалу пустой породы в карьере, заданной агрегатом повторного заполнения, который перекрывает эту зону, при этом агрегат повторного заполнения является пространством, образованным после извлечения материала из этого агрегата и поэтому очищенным от первоначального материала, и после полного повторного заполнения любого агрегата повторного заполнения, который расположен ниже этого агрегата.
14. Устройство для программирования открытой разработки с отвалом пустой породы, в котором материал извлекается из открытого карьера, и определяется, в какой пропорции извлеченный материал подлежит отправке в отвал, при этом предусмотрена дорожная сеть, имеющая множество узлов, по меньшей мере, некоторые из узлов задают входные точки к множеству отвалов пустой породы, и при этом отвалы пустой породы выбираются из группы, состоящей, по меньшей мере, из одного отвала в карьере и, по меньшей мере, одного внешнего отвала пустой породы, и материал, направляемый в отвал, перемещается по дорожной сети от места в карьере к входному узлу, относящемуся к одному из отвалов пустой породы, и материал, направляемый в отвал, сваливается на свалке пустой породы, при этом устройство содержит:
процессор для разделения карьера на множество зон и для выделения материала, подлежащего перемещению в одну из зон внутри карьера, пропорционально отвалу пустой породы в карьере, заданной агрегатом повторного заполнения, который перекрывает эту зону, при этом агрегат повторного заполнения является пространством, образованным после извлечения материала из этого агрегата и поэтому очищенным от первоначального материала, и после полного повторного заполнения любого агрегата повторного заполнения, который расположен ниже этого агрегата, и для обеспечения совместной стратегии извлечения и перемещения пустой породы, которая оптимизирует чистую стоимость совместной программы извлечения и перемещения пустой породы.
15. Способ формирования программы (плана) открытой разработки с отвалом пустой породы, заключающийся в том, что:
задают дорожную сеть, соединяющую множество зон;
задают план извлечения материала из открытого карьера посредством определения с помощью процессора того, подлежит ли материал отправке на, по меньшей мере одно или более выбранное из группы, содержащей:
хранение, отвал и обработку;
задают план перемещения пустой породы посредством определения с помощью процессора перемещения материала пустой породы, подлежащего извлечению в качестве пустой породы, так чтобы извлеченная пустая порода будет перемещена по дорожной сети от первоначальной зоны, в которой пустая порода получена, до зоны назначения, в которой пустая порода подлежит отвалу, при этом некоторый материал пустой породы, извлеченный из определенной первоначальной зоны, отправляют в заданную точку входа в дорожную сеть, и перемещают по дорожной сети и складывают, по меньшей мере, на одном внешнем отвале пустой породы, а другой материал пустой породы из определенной первоначальной зоны перемещают по дорожной сети, заканчивающейся в зоне назначения внутри карьера, после чего другой материал будет распределен пропорционально отвалу пустой породы в карьере, заданной агрегатом повторного заполнения, который перекрывает зону назначения, при этом агрегат повторного заполнения является пространством, образованным после извлечения материала из этого агрегата и поэтому очищенным от первоначального материала, и после полного повторного заполнения любого агрегата повторного заполнения, который расположен ниже этого агрегата, этот агрегат повторного заполнения будет заполнен повторно;
совместно оптимизируют с помощью процессора планирование извлечения материала и планирование перемещения пустой породы с помощью процессора.
16. Способ по п.15, в котором совместная оптимизация извлечения материала и планирование перемещения пустой породы содержит использование процессора, учитывающего предшествующие ограничения.
17. Способ по п.15, в котором совместная оптимизация извлечения материала и планирование перемещения пустой породы содержит использование процессора, обрабатывающего, по меньшей мере, одну блочную модель, причем процессор определяет порядок, в котором блоки материала удаляют из карьера, и порядок, в котором пространство, соответствующее предыдущим извлеченным блокам, заполняют повторно.
| Способ получения легких металлов | 1946 |
|
SU69628A1 |
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ НАГОРНЫХ МЕСТОРОЖДЕНИЙ | 1988 |
|
SU1670983A1 |
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И ЭКСКАВАТОРНО-БУНКЕРНЫЙ ПЕРЕГРУЗОЧНЫЙ ПУНКТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2204720C2 |
| WO 2004033854 A1, 22.04.2004. | |||

