Изобретение относится к области динамических средств определения массовых и инерционных характеристик, а именно к балансировочным стендам с вертикальной осью вращения.
Из уровня техники известен балансировочный стенд с вертикальной осью вращения (патент RU 2292533 С2 от 27.01.2007 МПК 6 G01M 1/02), состоящий из станины, базирующего устройства в виде соосных конических газостатических подшипников, установленных в корпусе, упругой колебательной подвески, выполненной в виде упругих консольных пластин с массивным основанием и соединяющей базирующее устройство со станиной, силоизмерительных датчиков, установленных в подвесах. Стенд позволяет определять дисбаланс и момент дисбаланса роторов различной конфигурации.
Основным недостатком данного стенда является невозможность определения полного комплекса массово-инерционных характеристик (девять массово-инерционных характеристик, исключая массу изделия). Совмещение функции несущего элемента и элемента жесткости существенно снижает диапазон возможных частот и амплитуд колебания по степеням свободы, реализуемым упругой подвеской. Газоподводящая арматура к газостатическим подшипникам является присоединенной массой и дополнительной жесткостью, которые затруднительно правильно учитывать, что ведет к увеличению погрешности стенда.
Из уровня техники известен стенд для динамической балансировки изделий (Тверской М.М. Автоматизированные стенды для контроля и расчета коррекции распределения масс летательных аппаратов: // журнал Динамика, прочность и износостойкость машин, выпуск 1, 1995 г., с.71-72), состоящий из станины, рамы, установленной на динамометрических опорах, прикрепленных к станине, базирующего устройства в виде соосных конических газостатических подшипников, установленных в корпусе, упругой колебательной подвески, выполненной в виде пластин, установленных в двух взаимно перпендикулярных плоскостях и соединяющих базирующее устройство с рамой, и торсиона, который одним концом жестко соединен со станиной, а другим может присоединяться к изделию. Упругая подвеска обеспечивает базирующему устройству три степени свободы. Стенд позволяет определять девять массово-инерционных характеристик изделия.
Основным недостатком данного стенда является использование в упругой подвеске пластин, обеспечивающих вращательную и поступательную степени свободы базирующему устройству, что приводит к нелинейному закону изменения жесткости при вращательном движении и существенным трудностям в определении оси вращения, кроме того, совмещение функции несущего элемента и элемента жесткости существенно снижает диапазон возможных частот и амплитуд колебания по степеням свободы, реализуемым упругой подвеской. Газоподводящая арматура к газостатическим подшипникам является присоединенной массой и дополнительной жесткостью, которые весьма затруднительно правильно учесть, что ведет к увеличению погрешности стенда.
В качестве прототипа выбран стенд для комплексного определения массогеометрических характеристик (Федоров В.Б. Контроль и коррекция массогеометрических характеристик летательных аппаратов: // текст лекций // часть III -Челябинск, Изд.-во ЮУрГУ, 2004 г. с.39-42), содержащий систему измерительных преобразователей, размещенную на станине и базирующем устройстве, выполненном в виде соосных конических газостатических подшипников, установленных в корпусе, и соединенном упругой подвеской со станиной, причем упругая подвеска содержит два торсиона, один из которых выполнен с возможностью соединения одним концом за базирующее устройство, а другим за изделие. Упругая подвеска обеспечивает базирующему устройству две степени подвижности. Стенд позволяет определять девять массово-инерционных характеристик изделий.
Основным недостатком данного стенда является наличие присоединенной массы в виде рамы, что ведет к увеличению погрешности измерения, а также газоподводящая арматура к газостатическим подшипникам является присоединенной массой и дополнительной жесткостью, которые затруднительно правильно учитывать, что ведет к увеличению погрешности стенда.
Задачей предлагаемого технического решения является создание автоматизированного стенда, обладающего высокой скоростью и точностью измерений, для определения полного комплекса массово-инерционных характеристик роторов и осесимметричных баллистических летательных аппаратов, а также для калибровки систем управления и навигации баллистических летательных аппаратов.
Поставленная задача достигается тем, что в стенде комплексного определения массово-инерционных характеристик, содержащем систему измерительных преобразователей, размещенную на станине и базирующем устройстве, выполненном в виде соосных конических газостатических подшипников, установленных в корпусе, и соединенном упругой подвеской со станиной, причем упругая подвеска содержит два торсиона, один из которых выполнен с возможностью соединения одним концом за базирующее устройство, а другим за изделие, согласно изобретению второй торсион выполнен с возможностью изменения жесткости и одним концом консольно соединен со станиной, а другим с базирующим устройством, при этом со стороны базирующего устройства торсион установлен на блок подшипников, которые соединяются посредством упругих пластин со станиной.
Также поставленная задача достигается тем, что второй торсион выполнен с переменным внешним диаметром, причем одним концом он закреплен на станине, а другим концом с увеличенным внешним диаметром соединен с базирующим устройством и установлен на блок подшипников таким образом, что момент инерции сечения торсиона в области с увеличенным внешним диаметром на несколько порядков выше момента инерции сечения торсиона в его рабочей части.
Также поставленная задача достигается тем, что первый торсион выполнен в виде упругой пластины, которая выполнена с возможностью закрепления серединой на изделии, а концами на базирующем устройстве.
Другой особенностью стенда является то, что в корпусе базирующего устройства соосно газовым подшипникам установлена турбина для разгона и торможения изделия.
Также поставленная задача достигается тем, что базирующее устройство выполнено с возможностью регулирования параметров газостатических подшипников.
Также поставленная задача достигается тем, что система измерительных преобразователей выполнена с возможностью регистрации перемещения, скорости, ускорения, положение и формы изделия в базирующем устройстве, и перемещения, скорости, ускорения базирующего устройства по доступным ему степеням свободы.
Применение в качестве базирующего устройства соосных конических газовых подшипников позволяет повысить точность и однозначность базирования изделия, обеспечить необходимую вращательную степень свободы изделию с минимальным трением, кроме того, применение конических газовых подшипников позволяет косвенным путем определить пространственное положение действительной аэродинамической оси изделия.
Применение в упругой подвеске торсиона позволяет реализовать необходимую вращательную степень свободы базирующему устройству, получить по направлению данной степени свободы практически линейный закон изменения жесткости, точно определить ось поворота, а также подводить газ, питающий газовые подшипники, через полый торсион, что исключает наличие трудно учитываемых дополнительных массы и жесткости подводящей арматуры.
Выполнение второго торсиона установленным на блок подшипников со стороны базирующего устройства позволяет свести к минимуму влияние изгиба торсиона на его крутильную жесткость, а применение газовых подшипников позволяет свести к минимуму потери на трение.
Выполнение второго торсиона с областью с увеличенным внешним диаметром в месте крепления к базирующему устройству и месте установки на блок подшипников позволяет повысить несущую способность блока газостатических подшипников за счет увеличения площади опорной поверхности и исключить влияние изгибных напряжений на крутильную жесткость торсиона.
Применение упругих пластин для соединения станины и блока подшипников, на которые устанавливается торсион, позволяет реализовать необходимую поступательную степень свободы базирующему устройству и получить по направлению данной степени свободы практически линейный закон изменения жесткости.
Применение турбины разгона и торможения изделия, установленной в корпусе базирующего устройства, позволит повысить эффективность разгона и торможения изделия, устранить необходимость во внешних подключаемых устройствах разгона-торможения, использование которых приводит к возникновению «вредных» колебаний по причине несоосности оси вращения изделия в подшипнике и оси вращения приводного вала устройства.
Применение измерительных преобразователей, регистрирующих перемещения, позволяет повысить точность и стабильность измерения в сравнении с применением измерителей преобразователей регистрирующих усилия за счет более высокой чувствительности измерительных систем, исключения лишних преобразований физических величин, меньшей чувствительности к условиям внешней среды и меньшего изменения параметров измерительной системы с течением времени.
Применение измерительных преобразователей, регистрирующих положение и форму изделия в базирующем устройстве, а также выполнение базирующего устройства в виде соосных конических газостатических подшипников, установленных в корпусе с возможностью регулирования параметров газостатических подшипников, таких как расход газа и давление газа, позволяет проводить контроль положения аэродинамической оси и геометрии поверхности баллистических летательных аппаратов.
Применение измерительных преобразователей, регистрирующих перемещения, скорости, ускорения, положение изделия в базирующем устройстве, а также перемещения, скорости, ускорения базирующего устройства по доступным ему степеням свободы, позволяет проводить калибровку инерциальных навигационных систем баллистических летательных аппаратов.
Изобретение направлено на определения массово-инерционных характеристик роторов различной конфигурации на докритических режимах, осесимметричных баллистических летательных аппаратов и осесимметричных баллистических летательных аппаратов с изменяемыми массово-инерционными характеристиками, а также на калибровку системы навигации и управления баллистических летательных аппаратов.
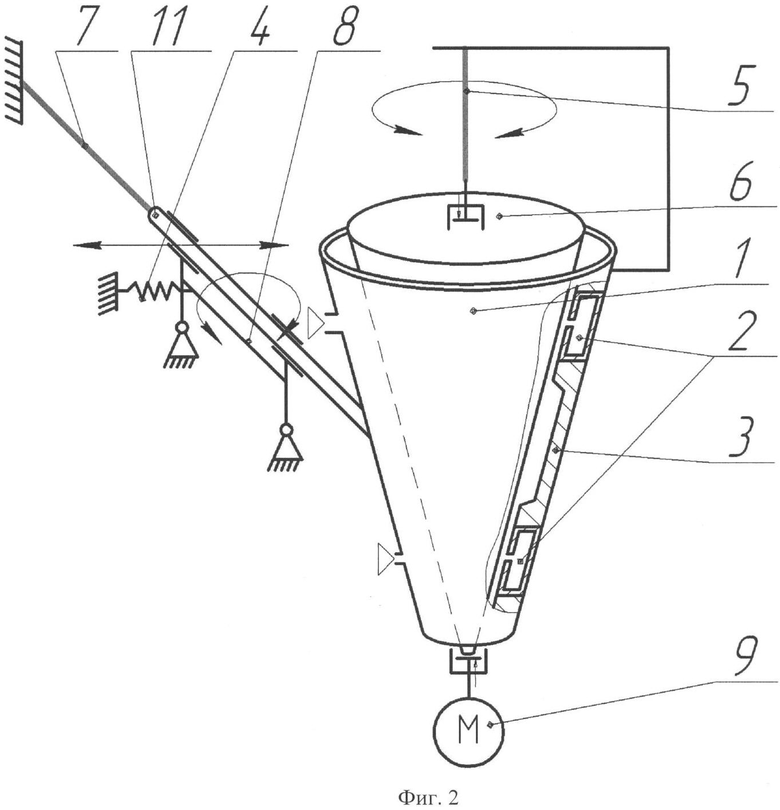
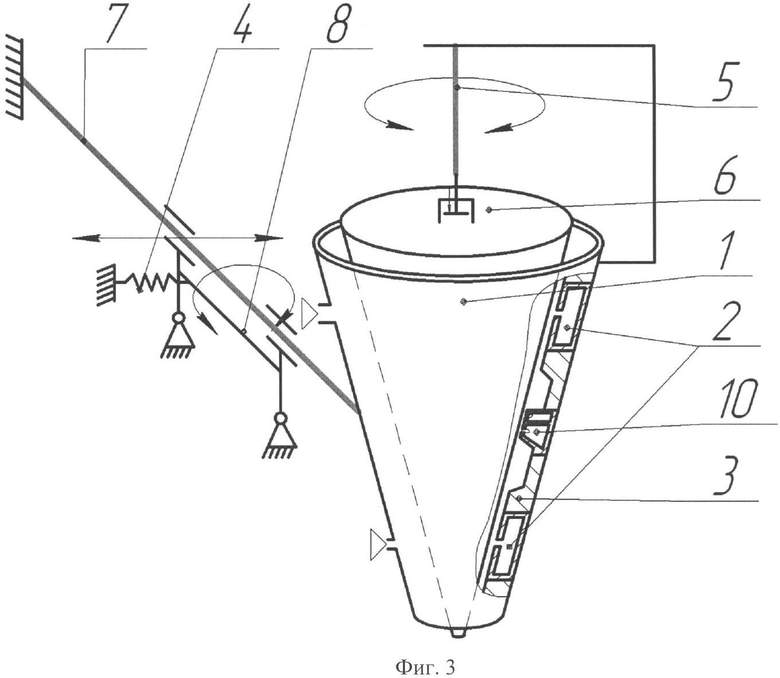
Сущность предлагаемого технического решения поясняется чертежами, где на фиг.1 изображен стенд с упругой подвеской на основе двух торсионов и внешним разгонно-тормозящим устройством, на фиг.2 изображен стенд, где второй торсион выполнен с областью увеличенного внешнего диаметра в месте установки на блок подшипников, на фиг.3 изображен стенд с турбиной разгона-торможения изделия, установленной в корпусе базирующего устройства, вместо внешнего устройства разгона-торможения.
Согласно заявляемому техническому решению стенд (фиг.1) содержит: станину (на чертежах не показано), систему измерительных преобразователей (на чертежах не показано), базирующее устройство 1 в виде соосных конических газостатических подшипников 2, установленных в корпусе 3, упругую подвеску, состоящую из блока упругих пластин 4 и двух торсионов. Первый торсион 5 выполнен с возможностью фиксации одним концом за базирующее устройство 1, а другим за изделие 6. Второй торсион 7 выполнен с возможностью изменения жесткости и одним концом консольно соединен со станиной, а другим с базирующим устройством 1. Со стороны базирующего устройства 1 второй торсион 7 установлен на блок подшипников 8, которые соединяются посредством упругих пластин 4 со станиной. Внешнее устройство разгона и торможения изделия 9 фиксируется за станину и может присоединяться к носку изделия 6.
На фиг.2 изображен стенд, где второй торсион 7 выполнен с областью 11 с увеличенным внешним диаметром в месте установки на блок подшипников 8.
На фиг.3 изображен стенд с турбиной 10 разгона-торможения изделия, установленной в корпусе базирующего устройства, вместо внешнего устройства разгона-торможения.
Технический результат достигается тем, что на предлагаемом стенде производится комплексное определение девяти массово-инерционных характеристик за один установ изделия в базирующее устройство 1. Изделие 6 помещается в базирующее устройство 1, затем в газостатические подшипники 2 подается газ под давлением и с расходом, необходимыми для «всплытия» изделия 6. Далее системой измерительных преобразователей регистрируются параметры движения изделия 6 на стенде в различных режимах. Стенд позволяет реализовать три режима измерения. В первом режиме производится определение момента инерции Jx1x1. В этом режиме подключен первый торсион 5, изделие 6 отклоняется на определенный угол и совершает свободные колебания вокруг оси своего вращения в базирующем устройстве 1, производится регистрация амплитуды и периода колебаний изделия 6 по данной степени свободы, по полученным значениям автоматически вычисляется момент инерции. Таким образом, производится определение моментов инерции методом крутильных колебаний. Частота колебаний изделия порядка 3 Гц.
Во втором режиме производится измерение центральных моментов инерции Jx1y1, Jx1z1 и поперечных координат центра масс Z и Y. Это по сути балансировочный режим. Происходит движение изделия 6 по всем трем степеням свободы, вращение в базирующем устройстве 1 с угловой скоростью 3-4 об./с, колебание вокруг оси второго торсиона 7 и колебание в горизонтальной плоскости на блоке упругих пластин 4. При этом происходит измерение амплитуды и периода колебаний и по полученным значениям автоматически вычисляются инерционные характеристики.
В третьем режиме производится определение осевых моментов инерции Jz1z1, Jy1y1, Jy1z1 и координаты X центра масс. Базирующее устройство 1 с изделием 6 поворачивается на определенный угол вокруг оси второго торсиона 7, затем отпускается, и изделие 6 совместно с базирующим устройством 1 совершают свободные колебания. Регистрируются амплитуды и период колебаний. Затем изделие 6 поворачивается в базирующем устройстве 1 на 45 градусов и производится повторное измерение, затем производят еще одно измерение с поворотом изделия на 45 градусов. По полученным результатам автоматически вычисляются оставшиеся инерционные характеристики.
Таким образом, предлагаемое техническое решение - стенд комплексного определения массовых, центровочных и инерционных характеристик осесимметричных роторов - позволяет повысить эффективность процесса балансировки и соответствует требованию промышленной применимости, так как может быть многократно воспроизведено и реализовано на основе современных технологий с использованием высокой степени автоматизации процесса посредством компьютерной обработки результатов измерений и управления параметрами движения изделия на стенде. Конструкция экспериментально опробована в лабораториях кафедр «Автоматизация механосборочного производства» и «Двигатели летательных аппаратов» Южно-Уральского государственного университета (г.Челябинск).
| название | год | авторы | номер документа |
|---|---|---|---|
| БАЛАНСИРОВОЧНЫЙ СТЕНД С ВЕРТИКАЛЬНОЙ ОСЬЮ ВРАЩЕНИЯ | 2004 |
|
RU2292533C2 |
| ДАТЧИК-ИЗМЕРИТЕЛЬ МАЛЫХ КРУТЯЩИХ МОМЕНТОВ | 1999 |
|
RU2162217C1 |
| Инерционная силовая установка транспортного средства | 1982 |
|
SU1094982A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2007 |
|
RU2336509C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| СПОСОБ МЕХАНИЧЕСКИХ ИСПЫТАНИЙ УЗЛОВ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2442122C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕМПФИРУЮЩИХ СВОЙСТВ ЭЛЕМЕНТОВ ТРАНСМИССИИ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2659762C1 |
| Комплекс для определения инерционных характеристик с измерительной системой | 2017 |
|
RU2683800C2 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ МАССО-ЦЕНТРОВОЧНЫХ И МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ТВЕРДОГО ТЕЛА ВРАЩЕНИЯ | 2010 |
|
RU2445592C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
Изобретение относится к области динамических средств определения массовых и инерционных характеристик, а именно к балансировочным стендам с вертикальной осью вращения. Стенд содержит станину, базирующее устройство в виде соосных конических газостатических подшипников, установленных в корпусе, упругую подвеску, систему датчиков, причем упругая подвеска содержит блок упругих пластин и два торсиона. Один торсион выполнен с возможностью фиксации одним концом за базирующее устройство, а другим за изделие. Второй торсион выполнен с возможностью изменения жесткости и одним концом консольно соединен со станиной, а другим с базирующим устройством. При этом со стороны базирующего устройства второй торсион установлен на блок подшипников, которые соединяются посредством упругих пластин со станиной. При этом упругая подвеска и базирующее устройство обеспечивают изделию три степени свободы: две вращательные и одну поступательную. Система измерительных преобразователей регистрирует перемещения, положение и форму изделия в базирующем устройстве, и перемещения базирующего устройства по доступным ему двум степеням свободы. Технический результат заключается в возможности повышения производительности и точности измерений. 4 з.п. ф-лы, 3 ил.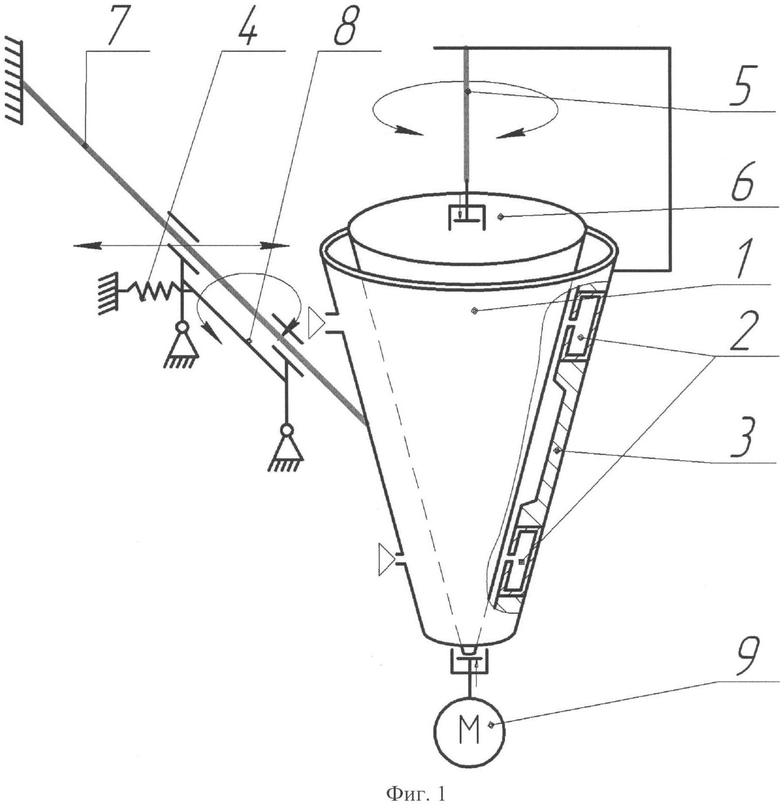
1. Стенд комплексного определения массово-инерционных характеристик осесимметричных роторов, содержащий систему измерительных преобразователей, размещенную на станине и базирующем устройстве, выполненном в виде соосных конических газостатических подшипников, установленных в корпусе, и соединенном упругой подвеской со станиной, причем упругая подвеска содержит два торсиона, один из которых выполнен с возможностью соединения одним концом за базирующее устройство, а другим за изделие, отличающийся тем, что второй торсион выполнен с возможностью изменения жесткости и одним концом консольно соединен со станиной, а другим с базирующим устройством, при этом со стороны базирующего устройства торсион установлен на блок подшипников, которые соединяются посредством упругих пластин со станиной.
2. Стенд по п.1, отличающийся тем, что второй торсион выполнен с переменным внешним диаметром, причем одним концом он закреплен на станине, а другим концом с увеличенным внешним диаметром соединен с базирующим устройством и установлен на блок подшипников.
3. Стенд по п.1, отличающийся тем, что в корпусе базирующего устройства соосно газовым подшипникам установлена турбина для разгона и торможения изделия.
4. Стенд по п.1, отличающийся тем, что базирующее устройство выполнено с возможностью регулирования параметров газостатических подшипников.
5. Стенд по п.1, отличающийся тем, что система измерительных преобразователей выполнена с возможностью регистрации перемещения, скорости, ускорения, положения и формы изделия в базирующем устройстве, а также перемещения, скорости, ускорения базирующего устройства по доступным ему степеням свободы.
| ФЕДОРОВ В.Б | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - Челябинск.: Изд.-во ЮУрГУ, 2004, с.39-42 | |||
| БАЛАНСИРОВОЧНЫЙ СТЕНД С ВЕРТИКАЛЬНОЙ ОСЬЮ ВРАЩЕНИЯ | 2004 |
|
RU2292533C2 |
| ТВЕРСКОЙ М.М | |||
| Автоматизированные стенды для контроля и расчета коррекции распределения масс летательных аппаратов: // журнал Динамика, прочность и износостойкость машин, выпуск 1, 1995, с.71-72. | |||

