Изобретение относится к области механических измерений, в частности к измерению массы, координат центра масс и тензора инерции элементов динамически подобных моделей летательных аппаратов и других тел.
Область применения - авиация, космическая техника, машиностроение и др.
Задача проектирования, изготовления и испытания на флаттер динамически подобных моделей требует для своего решения знания массовых и инерционных характеристик их элементов - в дальнейшем изделий.
К числу таких характеристик относятся масса, координаты центра масс, осевые и центробежные моменты инерции, образующие в совокупности полный тензор инерции.
В монографиях, посвященных теории и технике измерений механических величин, вопросы измерения тензора инерции вообще не рассматриваются.
Известны статьи, в которых рассматриваются различные теоретические аспекты измерения моментов инерции:
(см. Juha Toivola. Метод определения инерционных свойств абсолютно твердого тела по его частотному отклику. P.Co. BOX 589, SF-33/01, Тампере, Финляндия, Технологический университет;
Hiroshi Okuzumi. Определение характеристик абсолютно твердого тела по экспериментальной передаточной функции. // Центральная лаборатория двигателей Nissan Motor Со, Ltd, 1991;
Беляков А.О. Определение динамических параметров массивных тел по формам колебаний. // МГУ им. М.В.Ломоносова, 2005;
Богданов В.В., Волобуев B.C. и др. Комплекс для измерения масс и моментов инерции машиностроительных изделий. Измерительная техника №2, 2002, с.37-39).
В этих работах отсутствуют законченные конструктивные решения, которые можно было бы использовать для интересующего нас типа изделий.
Существующие в настоящее время устройства измерения массовых и инерционных характеристик представляют собой различного рода подвесы (физический маятник, бифилярный подвес и др.) и базируются на подсчете числа периодов колебаний в единицу времени изделий, закрепленных на них:
(см. Келдыш М.В. Избранные труды. Механика. М.: Наука, 1985, с.401÷406;
Ананьев И.В., Колбин Н.М., Серебрянский Н.П. Динамика конструкций летательных аппаратов. М.: Машиностроение, 1972, с.184-191).
К недостаткам подобных устройств относятся, прежде всего, сравнительно низкая точность измерения осевых моментов инерции и координат центра масс. Кроме того, эти устройства не позволяют измерять центробежные моменты инерции, а следовательно, остается неизвестным полный тензор инерции. К тому же практическое применение этих устройств требует большого объема ручного труда и дополнительного персонала.
По этой причине задача повышения точности, расширения функциональных возможностей и автоматизации измерения массовых и инерционных характеристик изделий является своевременной и актуальной.
Наиболее близким решением является созданный во ФГУП «ЦАГИ» стенд для измерения массы, координат центра масс и тензора инерции изделия (патент на изобретение №2368880, МПК G01M 1/10, 2008), содержащий раму, к которой крепится изделие, динамометры, пружины, станину, динамометрическую платформу с узлом поворота рамы, датчики угла, устройства задания колебаний, состоящие из подвижных рам, соединенных между собой и со станиной шарнирами и системой пружин, соединенных с рамами, при этом оси шарниров соединены с осями датчиков угла.
Стенд имеет два режима измерений - статический и динамический.
В статическом режиме при помощи динамометрической платформы измеряются масса и три координаты центра масс (ЦМ) изделия. При этом для измерения вертикальной координаты ЦМ поворотная рама вместе с изделием наклоняется на некоторый угол, который измеряется датчиком угла.
В динамическом режиме рама вместе с изделием совершают свободные затухающие колебания последовательно вокруг трех ортогональных осей.
При помощи динамометрической платформы измеряются три динамических момента, по которым, используя показания датчиков углов и математический аппарат цифровой обработки сигналов, определяются осевые и центробежные моменты инерции.
Основным недостатком данного решения являются сравнительно низкая точность измерения моментов инерции и сложность конструкции стенда.
Точность измерения моментов инерции в значительной степени определяется двумя вертикальными координатами, фиксирующими положение центра масс изделия относительно оси вращения и начала координат, расположенного на динамометрической платформе.
Данные координаты определяют величины позиционного и сопутствующего моментов при колебаниях изделия.
Указанные моменты вычитаются из общего измеренного момента, а их разность дает полезный момент, по которому определяются искомые моменты инерции. В рассматриваемом стенде из-за большого удаления центра масс от оси вращения и динамометрической платформы позиционный и сопутствующий моменты получаются слишком большими, они во много раз превосходят полезный момент, который получается как малая разность больших величин. В результате точность измерения моментов инерции снижается.
Другим недостатком является относительная сложность конструкции стенда, вытекающая из методики измерений, согласно которой колебания изделия осуществляется вокруг трех ортогональных осей.
Служащая для этой цели пространственная система рам в сочетании с удерживающими их опорами не обеспечивает требуемой жесткости конструкции, отчего возникают трудно контролируемые угловые деформации, оказывающие отрицательное влияние на точность измерения моментов инерции. Особенно заметно указанный недостаток проявляется при колебаниях внутренней и внешней рам вокруг горизонтальных осей.
Техническим результатом предлагаемого изобретения является повышение точности измерений за счет исключения влияния поправок от позиционного и сопутствующего моментов на результаты измерения осевых и центробежных моментов инерции и упрощение конструкции стенда путем перехода от трехстепенной к двухстепенной колебательной системе и совмещение функций устройства задания колебаний с функциями наклона изделия при статическом режиме измерений.
Технический результат достигается тем, что стенд для измерения массы, координат центра масс и тензора инерции изделия, содержащий раму, динамометры, датчики угла, систему пружин, станину, динамометрическую платформу, узел поворота рамы, устройства задания колебаний, шарниры, снабжен механическим адаптером, к которому крепится изделие, механизмом вертикального перемещения адаптера, закрепленным на поворотной платформе, имеющей возможность поворачиваться относительно неподвижной платформы, валом, рычагом, двумя винтовыми механизмами задания колебаний, качалкой, включающей тяги с перемычками и раму, двумя динамометрическими элементами, один из которых, расположенный под неподвижной платформой, измеряет крутящий момент вокруг оси Y и состоит из четырех наклонных опорных и одной центральной сигнальной стоек, установлен на втором динамометрическом элементе, закрепленном соосно на верхнем торце вала и состоящем из двух опорных и двух сигнальных стоек, который измеряет крутящий момент вокруг оси Z, первым датчиком угла, соединенным с нижним торцом вала, двумя парами пружин, обеспечивающими с помощью первого винтового механизма колебания вала вокруг вертикальной оси Z и соединенными с рычагом и корпусом, расположенным под динамометрической платформой, закрепленной с помощью динамометров на раме, подвешенной на станине посредством четырех тяг на двух шарнирах, ось одного из которых соединена со вторым датчиком угла, и дополнительными двумя парами пружин, обеспечивающими с помощью второго винтового механизма колебания качалки вокруг горизонтальной оси Y, закрепленными на кронштейнах станины и на силовых пальцах, установленных на качалке, при этом центр масс изделия и начало координат динамометрического элемента, измеряющего крутящий момент вокруг оси Y, совмещены с осью шарниров.
Для более подробного пояснения предлагаемого изобретения рассмотрим схему стенда, его конструкцию и принцип действия.
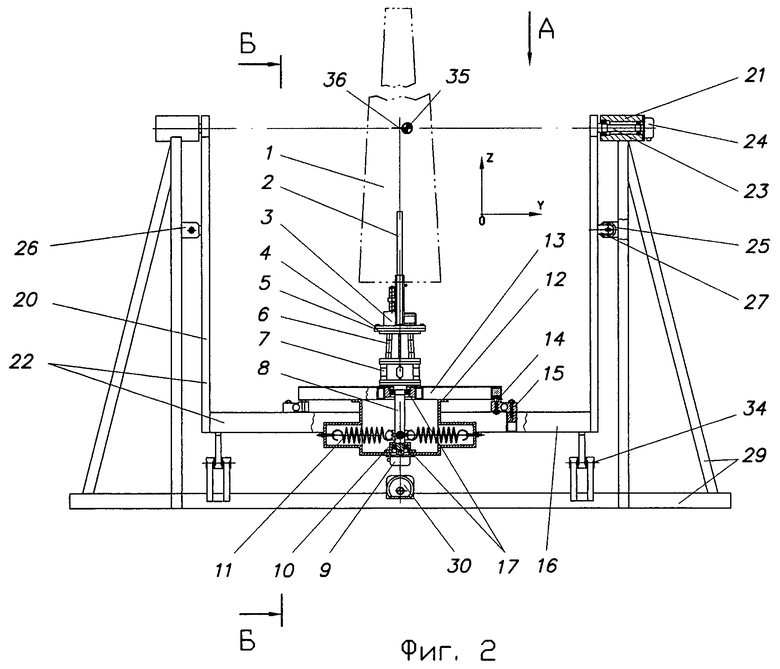
На фиг.1 показана аксонометрическая проекция конструкции стенда.
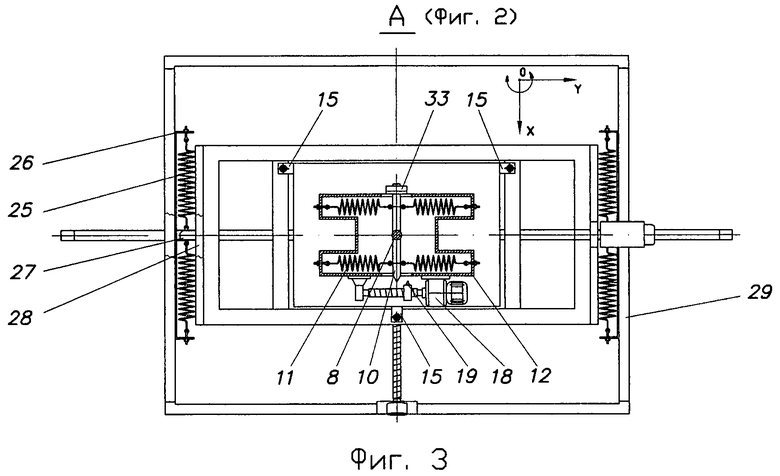
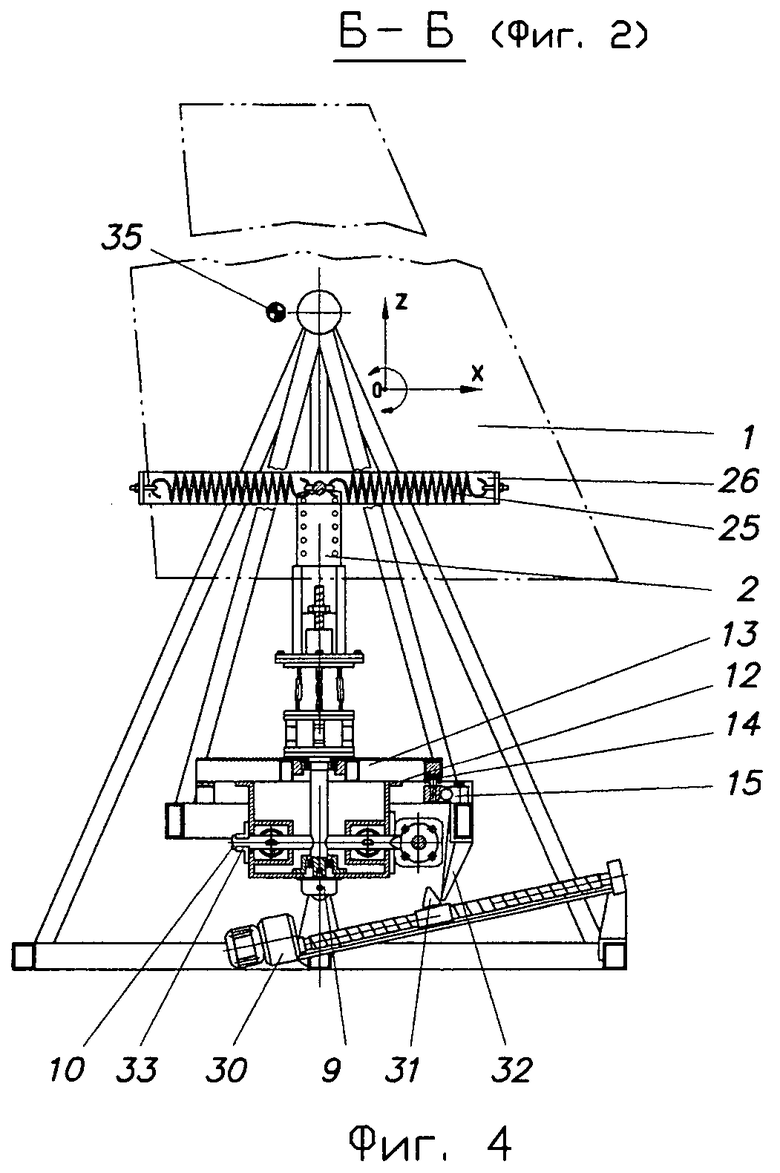
На фиг.2, фиг.3 и фиг.4 - конструкция стенда в трех ортогональных проекциях.
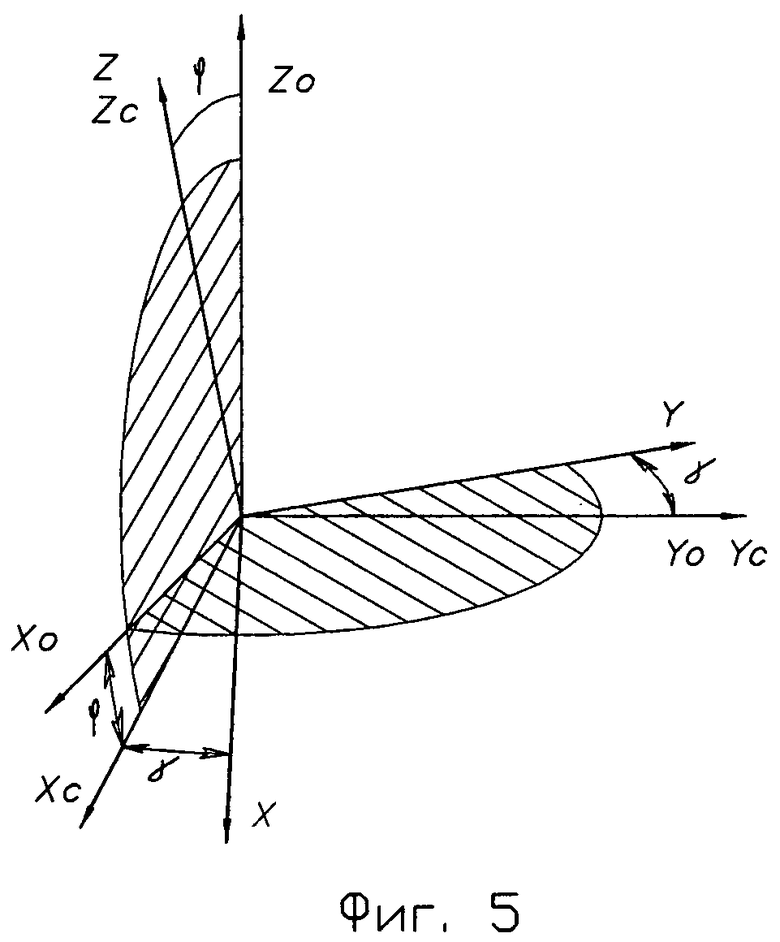
На фиг.5 - система осей координат.
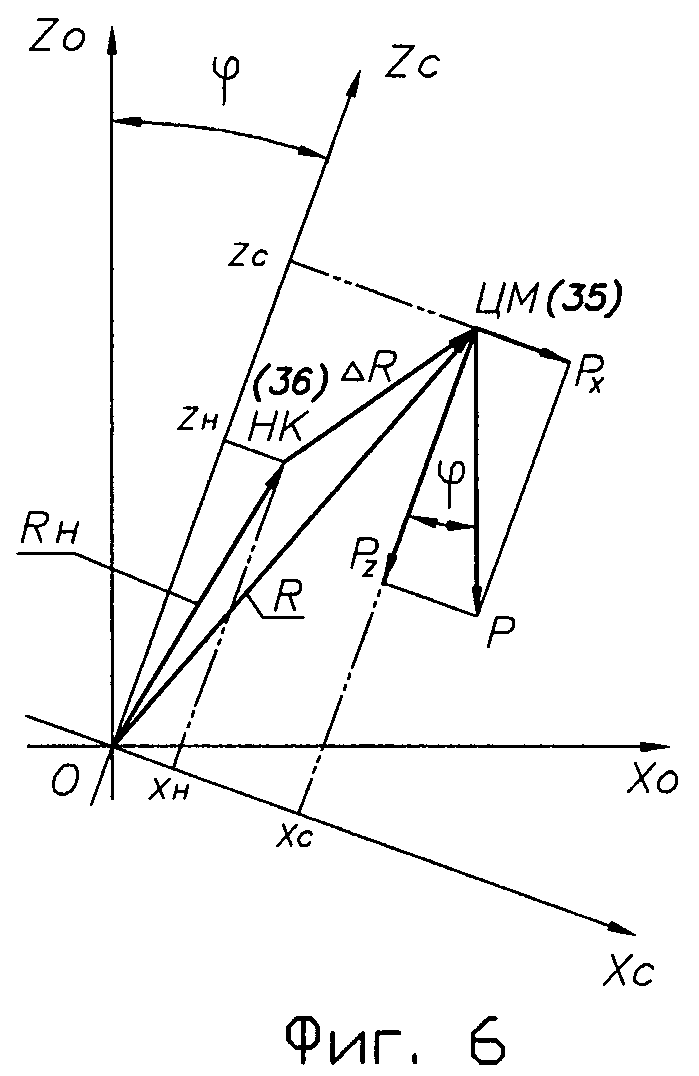
На фиг.6 - диаграмма векторов, определяющая положение центра масс.
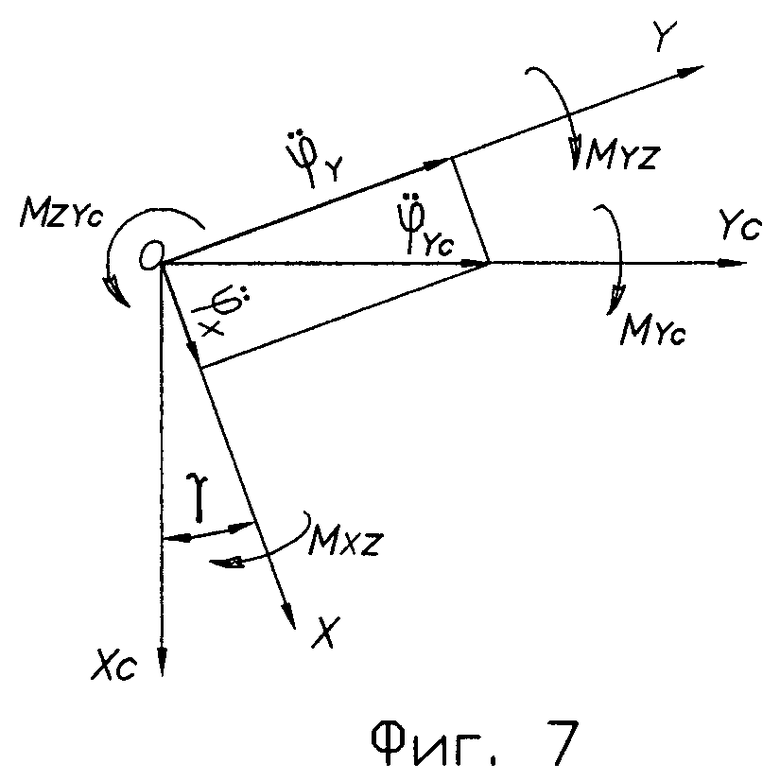
На фиг.7 - оси 0XY изделия, повернутые относительно осей 0XcYc на угол γ.
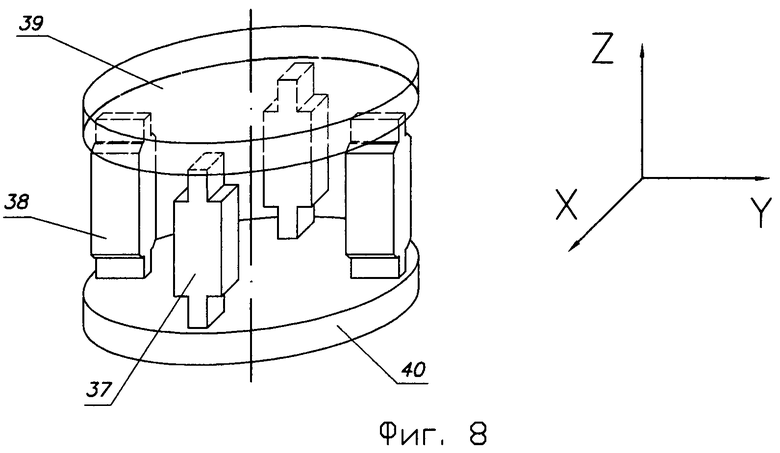
На фиг.8 - аксонометрическая проекция динамометрического элемента Mz.
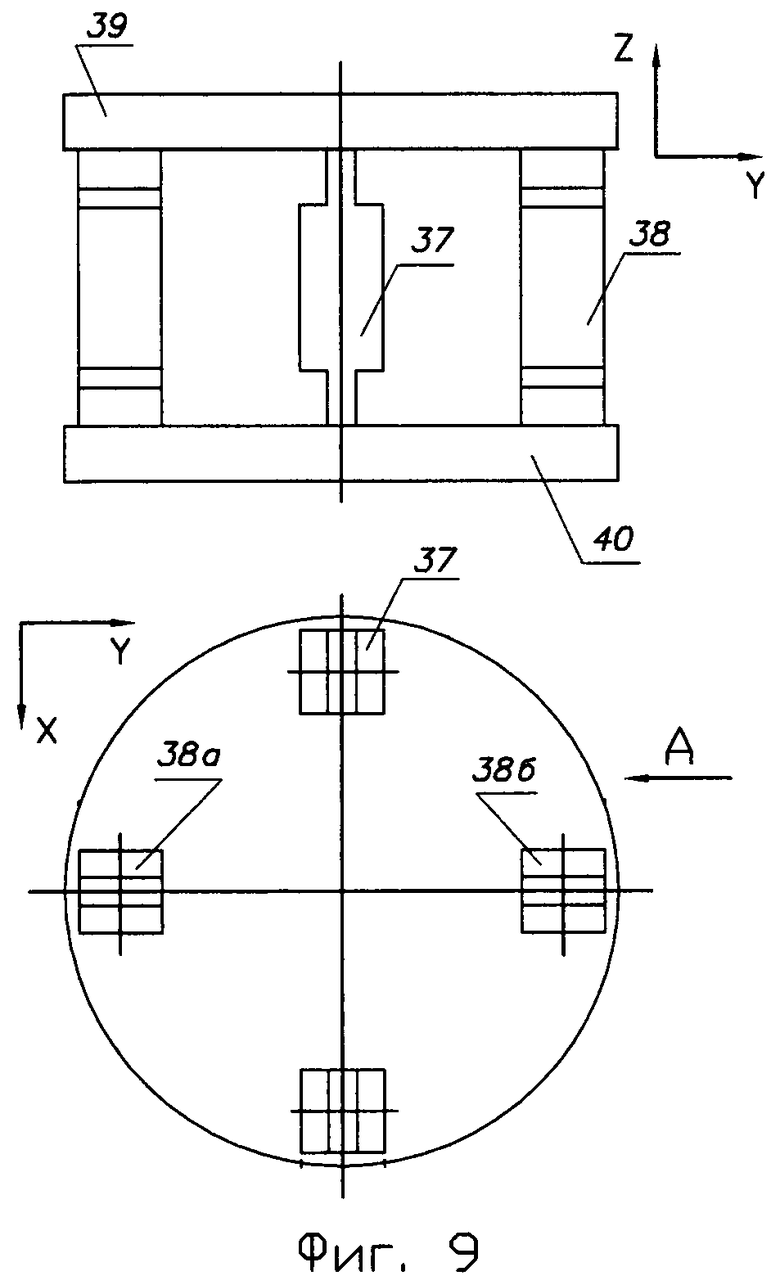
На фиг.9 - чертеж динамометрического элемента Mz.
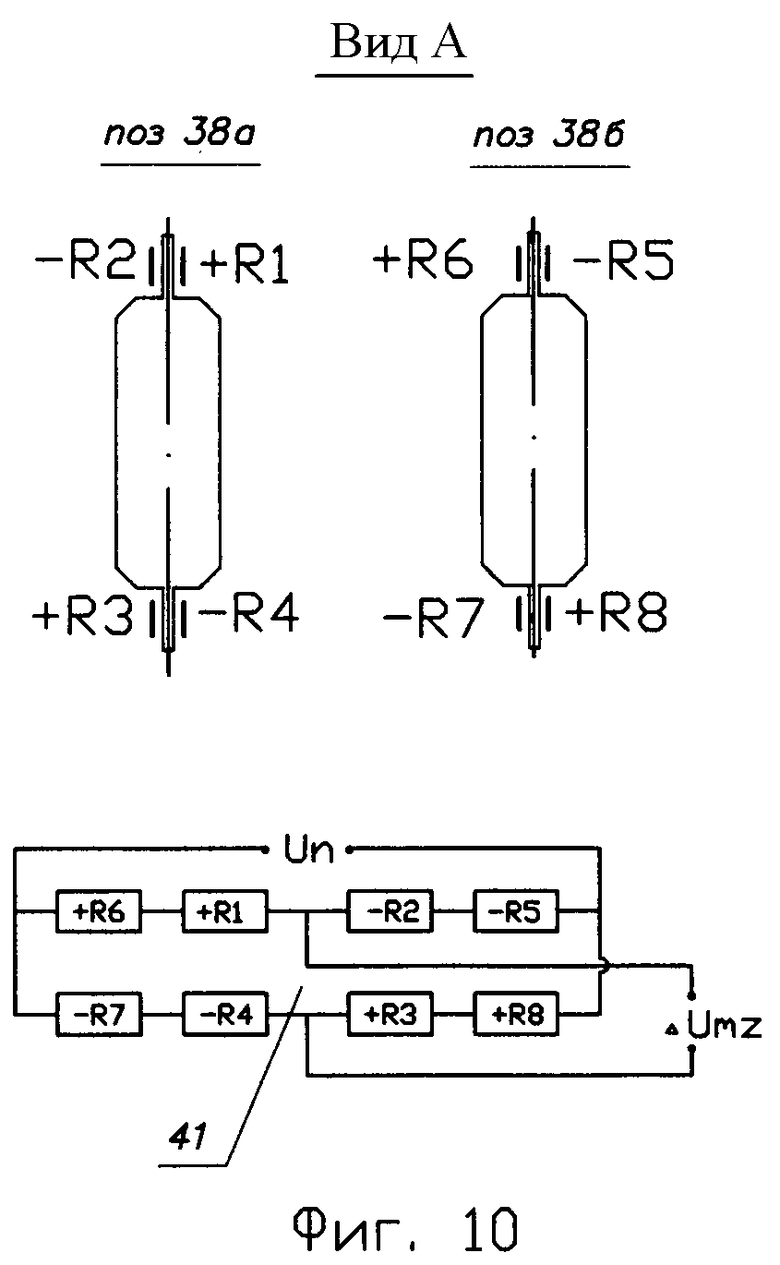
На фиг.10 - схемы расположения тензодатчиков и тензометрического измерительного моста динамометрического элемента Mz.
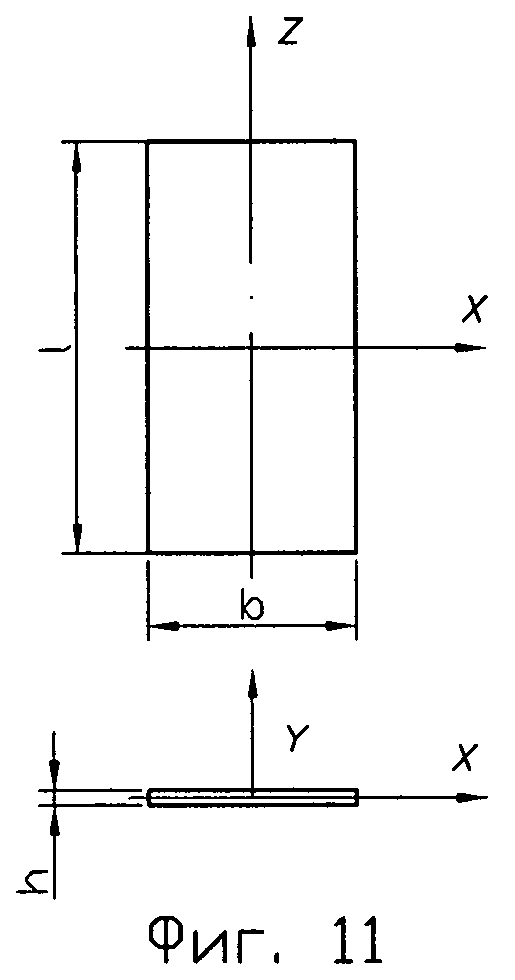
На фиг.11 - чертеж пластины, являющейся динамическим аналогом изделия.
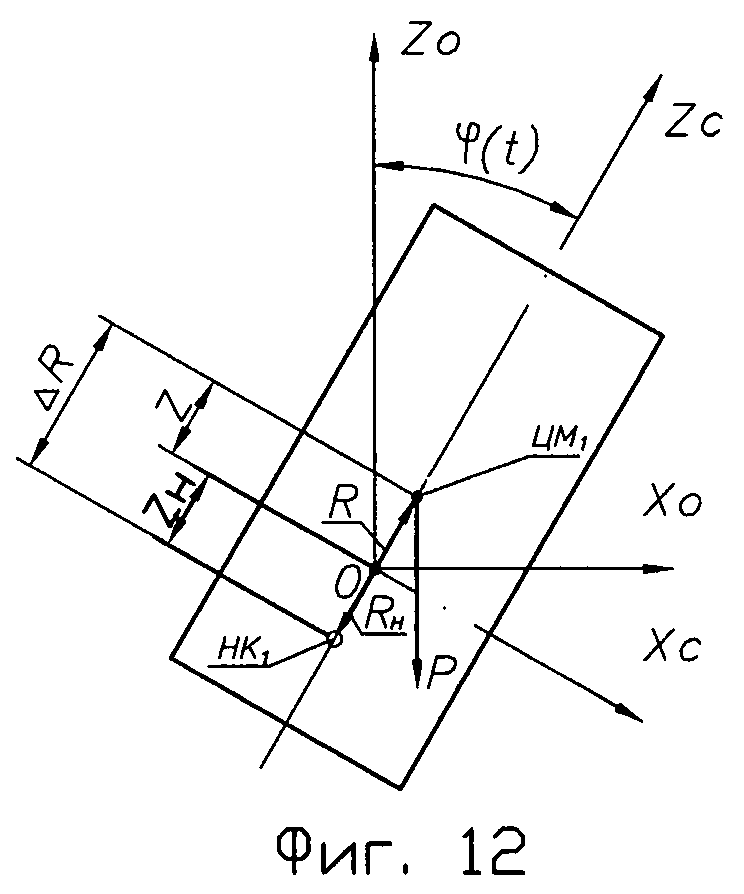
На фиг.12 - схема колебаний пластины.
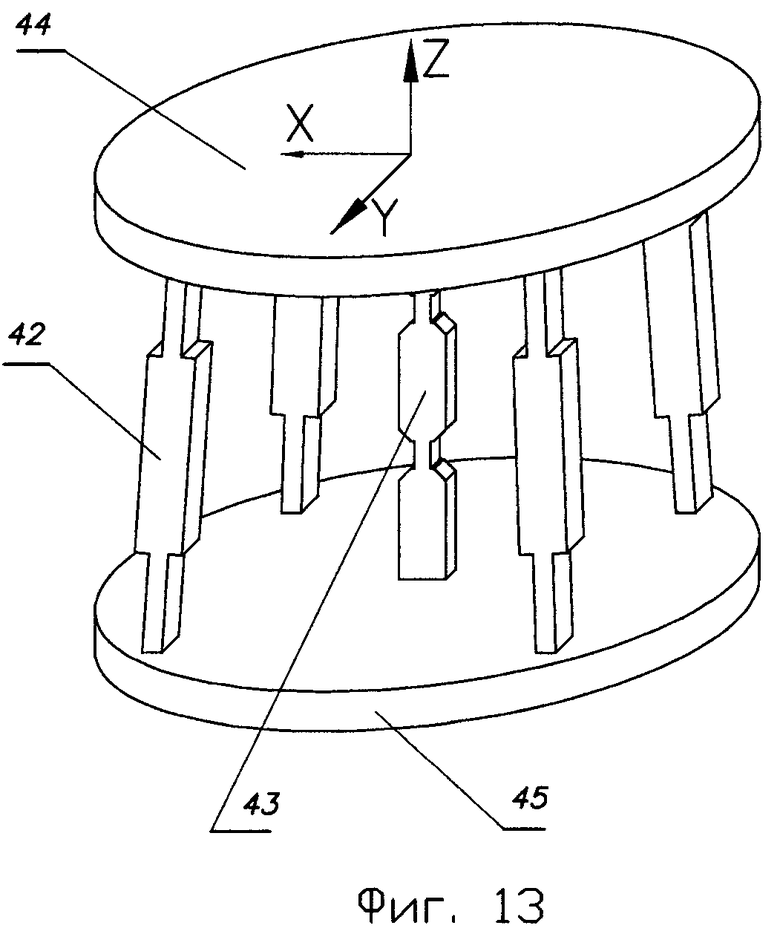
На фиг.13 - аксонометрическая проекция динамометрического элемента Мy.
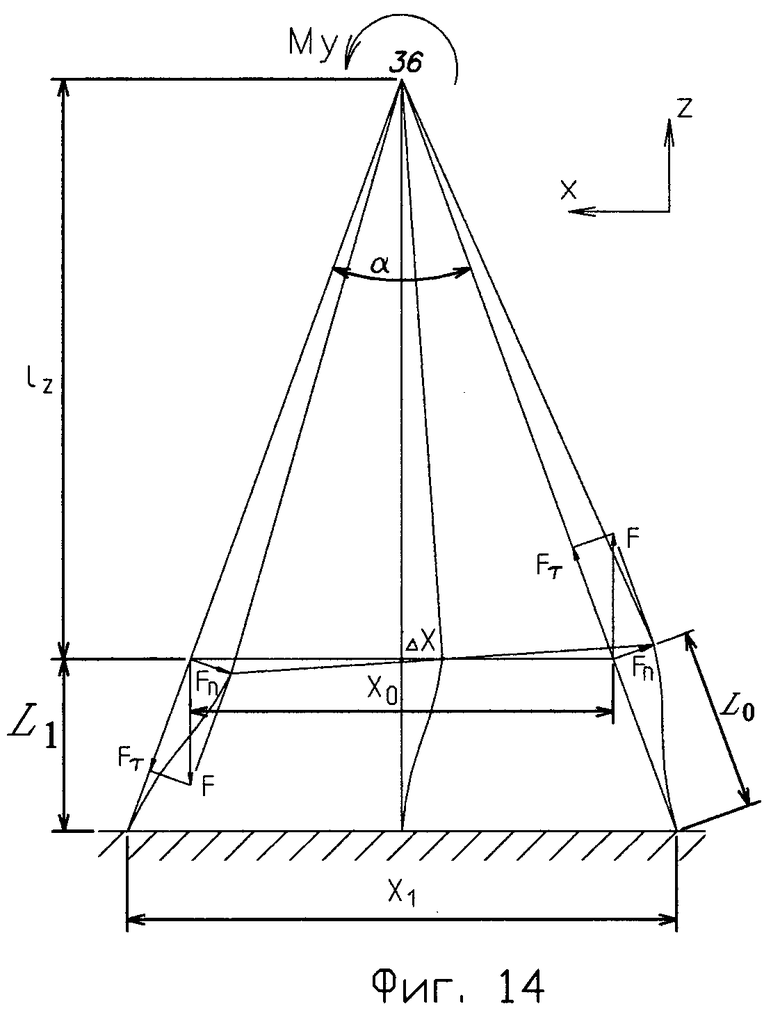
На фиг.14 - схема деформации стоек динамометрического элемента Мy.
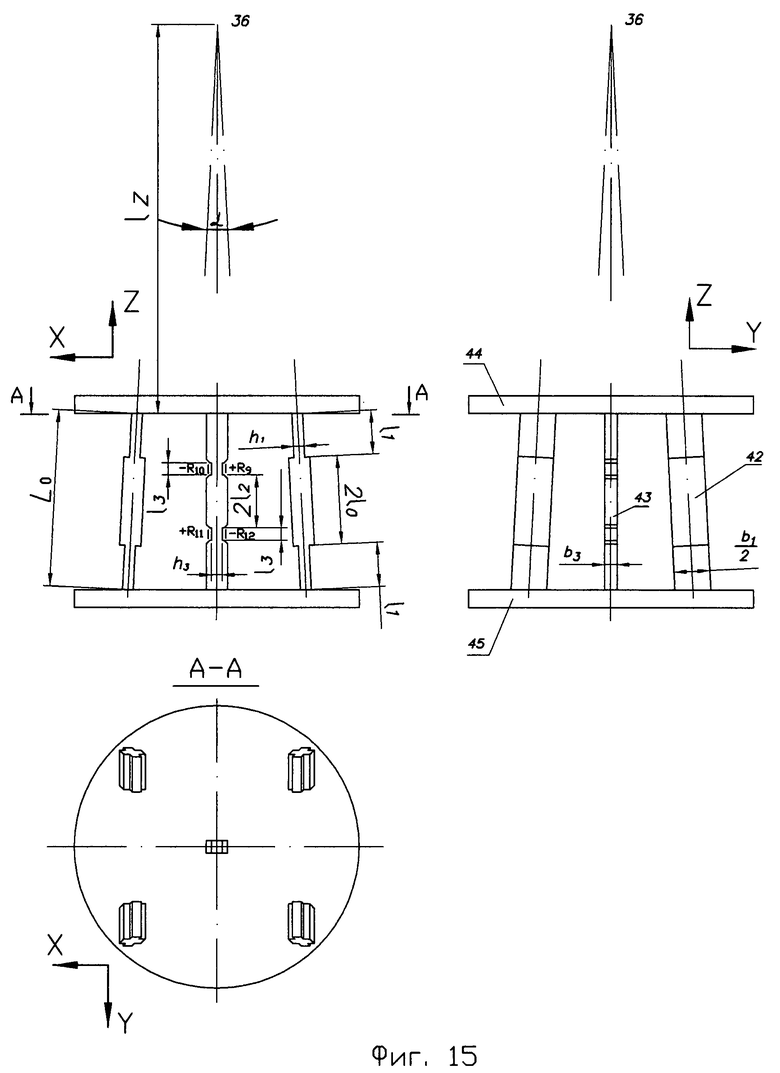
На фиг.15 - чертеж динамометрического элемента Мy.
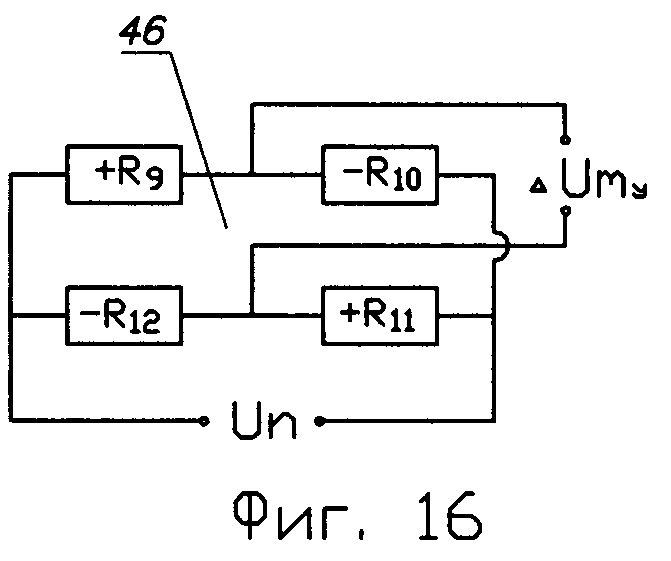
На фиг.16 - схема тензометрического измерительного моста динамометрического элемента Мy.
Изделие 1 установлено на механическом адаптере 2, изготовленном, например, в виде пластины с отверстиями, соединенном с механизмом вертикального перемещения механического адаптера 3, закрепленным на поворотной платформе 4, которая имеет возможность поворачиваться относительно неподвижной платформы 5 на угол 360°.
Неподвижная платформа 5 соединена с динамометрическим элементом Мy 6 для измерения момента Мy, установленным на динамометрическом элементе Mz 7, предназначенном для измерения момента Mz.
Динамометрический элемент Mz 7 закреплен соосно на верхнем торце вала 8, а нижний торец вала 8 соединен с первым датчиком угла 9. Рычаг 10 вала 8 соединен с пружинами 11, противоположные концы которых закреплены на корпусе 12 (на фиг.1 показан пунктиром), установленном под динамометрической платформой 13, которая через три шарнира 14 и три динамометра 15 опирается на раму 16.
Вал 8 на двух подшипниках 17 установлен в корпусе 12 так, что вал 8 может с малым моментом силы трения поворачиваться вокруг вертикальной оси Z.
Первый винтовой механизм задания колебаний 18 с ведущим поводком 19 задает начальное угловое отклонение рычагу 10 и после выхода поводка 19 из зацепления с рычагом 10 вал 8 под действием пружин 11 совершает колебания вокруг вертикальной оси Z с круговой частотой ωz.
Рама 16 подвешена при помощи тяг 20 на шарнирах 21, расположенных горизонтально.
При этом вся конструкция тяг 20 и рамы 16 образует качалку 22 с горизонтальной осью вращения, проходящей через оси 23 шарниров 21. С осью 23 соединен второй датчик угла 24.
Две пары пружин 25 закреплены одним концом к кронштейнам 26, а другим - к силовым пальцам 27, установленным на перемычках 28 тяг 20.
Второй винтовой механизм задания колебаний 30 ведущим поводком 31 и упором 32 на раме 16 задают отклонение качалки 22 от начального положения. После выхода поводка 31 из зацепления с упором 32 качалка 22 под действием пружин 25 совершает колебания вокруг горизонтальной оси Y с круговой частотой ωy. При помощи второго винтового механизма 30 также задаются дискретные углы наклона качалки 22, необходимые для измерения координат центра масс изделия 1 при статическом режиме измерений.
На корпусе 12 установлен фиксатор 33, а на станине 29 - два фиксатора 34, при помощи которых предотвращаются колебания изделия 1 одновременно по двум осям.
Устройство работает следующим образом.
Подобно прототипу в нем предусмотрены два режима измерений - статический и динамический.
В статическом режиме измеряются вес изделия (масса) и координаты центра масс (ЦМ) 35. В динамическом режиме измеряются осевые и центробежные моменты инерции, при этом механизм вертикального перемещения адаптера 3 совмещает начало координат (НК) 36 динамометрического элемента Мy 6 с осью вращения качалки 22.
Рассмотрим более подробно оба режима измерений.
В статическом режиме измерений фиксатор 33 предотвращает колебания изделия вокруг оси Z.
При измерении веса изделия 1 фиксаторы 34 обеспечивают горизонтальное положение динамометрической платформы.
Вес изделия 1 измеряется как сумма реакций динамометрической платформы 13, измеряемых тремя динамометрами 15
P=R1+R2+R3
где R1; R2; R3 - силы реакций, действующих на динамометры.
При измерении координат х, y и z ЦМ 35 изделия 1 фиксаторы 34 разъединяют и измерения выполняют при фиксированных углах наклона качалки 22.
Измеряемый сигнал поступает с динамометрического элемента Мy 6.
На фиг.5 приведена система осей координат. Неподвижные оси X0, Y0 и Z0 связаны со станиной 29. Ось Y0 совпадает с осью вращения качалки 22, а ось Z0 с осью Z динамометрического элемента Mz 7 в закрепленном положении качалки.
Оси Хс, Yc и Zc связаны с качалкой 22.
При повороте качалки 22 вокруг оси Y0 оси Хс и Zc отклоняются на угол φ относительно осей Х0 и Z0, а ось Yc совпадает с Y0.
Оси X, Y и Z связаны с изделием 1 и в общем случае они повернуты вокруг оси Zc на угол γ.
При γ=0 оси X, Y и Z совпадают с осями Хс, Yc и Zc.
На фиг.6 приведена диаграмма векторов, определяющих положение ЦМ 35 и НК 36 при наклоне изделия 1 на угол φ при γ=0.
Радиус-вектор R с координатами хс, yс, zc соединяет начало координат «0» с ЦМ 34 изделия 1. Радиус-вектор Rн с координатами хн, yн, zн определяет положение НК 36 динамометрического элемента My относительно осей Xc, Yc и Zc.
Разностный вектор ΔR с координатами

соединяет НК 36 с ЦМ 35.
Вектор силы веса - Р направлен вдоль оси Z0.
Изначально радиус-вектор R задан в координатах х, y, z системы 0XYZ изделия 1.
Поворот системы координат 0XYZ вокруг оси Zc переводит вектор R в систему 0XcYcZc.

Поворот системы координат 0XcYcZc вокруг оси Y0 переводит разностный вектор ΔR в систему 0X0Y0Z0.

Позиционный момент Mп силы - Р в системе 0X0Y0Z0
Тогда Мх0=-Δy0Р; Мy0=Δх0P; Mz0=0.
Проекции векторов Мх0 и Мy0 на оси 0XcYcZc

Моменты Мyс и Mzc измеряются ДЭ Мy 6 и ДЭ Mz 7, а Мхc не измеряется. Координаты Δx0; Δy0; Δz0 связаны с координатами Δxс; Δyс; Δzc - матрицей поворота (3).
В свою очередь связь координат xс; yc; zc с координатами х; y; z дается матрицей поворота (2).
С учетом уравнений (2) и (3) для моментов Мyс и Mzc получим:

Системы уравнений (5) и (6) являются исходными при определении неизвестных координат х; y; z. Указанные координаты могут быть определены из первой системы (5). Для этого при γ=const задается ряд последовательных значений φi (i=0, 1, 2, …n) и измеряются моменты Myci.
Полученная таким образом избыточная система уравнений решается методом наименьших квадратов относительно Δхс и Δzc. В результате

где  - вектор-столбец
- вектор-столбец
A - системная матрица
Далее, задавая различные углы γ, получим набор значений Δхc и Δzc, по которым из второго и третьего уравнений (5) методом наименьших квадратов находим координаты х, y, z.
В динамическом режиме измеряются составляющие тензора T инерции изделия 1.

Необходимо измерить три осевых
Ixx; Iyy; Izz
и три центробежных момента инерции
Iху=Iyх; Ixz=Izx; Iyz=Izy
Измерения производятся в два этапа.
На первом этапе возбуждаются колебания вокруг оси Y0.
Для этого фиксаторы 34 расцепляются и качалка 22 отклоняется на угол φ0 при помощи второго винтового механизма 30. Когда поводок 31 выходит из зацепления с упором 32 качалка 22 вместе с изделием 1 начинает совершать угловые затухающие колебания вокруг оси Y0.
Закон изменения по времени угла отклонения качалки от положения равновесия:

Угловое ускорение

(см. «Стенд для измерения массы, координат центра масс и тензора инерции изделия». Патент на изобретение №2368880, МПК G01M 1/10, 2008),
где βy - коэффициент затухания колебаний;
ω0y - недемпфированная круговая частота колебаний;
ωу - демпфированная круговая частота колебаний

ψу - фазовый угол:
Амплитуды колебаний
 - амплитуда угла поворота;
- амплитуда угла поворота;
 - амплитуда углового ускорения.
- амплитуда углового ускорения.
Обычно βу≤0,05. Тогда с достаточной точностью можно записать

Вектор динамического момента, действующий на изделие 1 при колебаниях

(см. Стрелков С.П. // Механика. - М.: Наука, 1975, с.223),
где M - вектор момента при колебаниях изделия вокруг ЦМ;
M1 - вектор момента при колебаниях массы «m» вокруг оси Y0.
Момент M является полезным, служащим для определения тензора инерции изделия.
Момент M1 является сопутствующим, который необходимо исключить из общего динамического момента.
Полезный момент

где  - вектор углового ускорения с компонентами
- вектор углового ускорения с компонентами

Конструкция стенда в отличие от прототипа позволяет задавать лишь две компоненты  и
и  углового ускорения и измерять две составляющие Мyс и Mzc вектора момента.
углового ускорения и измерять две составляющие Мyс и Mzc вектора момента.
Кроме того, в конструкции предусмотрен поворот изделия 1 вокруг оси Zc на угол «γ» посредством поворота поворотной платформы 4 относительно неподвижной платформы 5.
Указанный набор средств позволяет определить все элементы тензора (8).
На фиг.7 показаны оси 0XY изделия 1, повернутые относительно осей 0XcYc на угол γ, отмечены векторы  ;
;  ;
;  углового ускорения, а также составляющие Мyс; Mzус и Mxz; Myz векторов момента.
углового ускорения, а также составляющие Мyс; Mzус и Mxz; Myz векторов момента.
Момент Мус - действующий на динамометрический элемент Мy 6.

где Iyc - центральный момент инерции изделия 1 относительно оси Yc, проходящей через ЦМ.
Iyс=Iyy·cos2γ+Iхх·sin2γ-2·Iхy·cosγ·sinγ,
Ixx; Iyy; Ixy - осевые и центробежный моменты инерции изделия.
Момент Mzyc, действующий на динамометрический элемент Mz 7 при колебаниях изделия вокруг оси Yc.

Учитывая, что

получим

Уравнения (12) и (13) являются исходными при измерении пяти элементов тензора T.
Для этого при помощи поворотной платформы 4 задаются «n» последовательных значений угла «γ» и производится «n» последовательных возбуждений колебаний качалки 22.
Измеряя амплитуды моментов и угловых ускорений, получим в соответствии с (12) и (13) две избыточные системы из «n» уравнений, которые решаются методом наименьших квадратов.
Из первой системы находим
Iхх; Iуу и Iху
Из второй
Izx и Izy.
На втором этапе при измерении осевого момента Izz качалка 22 фиксаторами 34 крепится к станине 29, а фиксатор 33 освобождает рычаг 10 и вал 8. При помощи первого винтового механизма 18 возбуждаются крутильные колебания вокруг оси Z0.
Динамометрический элемент Mz обеспечивает измерение момента при колебаниях вала 8 и изделия 1 вокруг вертикальной оси Z.
На фиг.8 показана аксонометрическая проекция, а на фиг.9 приведен чертеж динамометрического элемента Mz.
Динамометрический элемент Mz состоит из двух опорных стоек 37 и двух сигнальных стоек 38. Стойки расположены между двумя жесткими основаниями 39 и 40. Все стойки имеют переменное сечение и состоят из жестких и упругих участков. На упругие участки сигнальных стоек установлены тензорезисторы R1…R8, которые соединены в тензометрический измерительный мост 41, показанный на фиг.10.
Момент, действующий на динамометрический элемент Mz

Моменты относительно осей 0XY изделия

Момент Mуcz относительно оси Yc

или

Уравнения (14) и (15) позволяют определить три элемента тензора инерции Izz; Ixz и Iyz.
Учитывая, что элементы Izx и Izy были определены ранее, полученные значения Ixz и Iyz с учетом симметрии тензора инерции могут служить в качестве контрольных измерений, опираясь на симметрию тензора инерции.
Сопутствующий момент M1 выражается двойным векторным произведением

где  - вектор углового ускорения;
- вектор углового ускорения;
ΔR, R - радиусы-векторы;
m - масса изделия.
Векторное произведение, взятое в квадратные скобки, представляет вектор инерционной силы.
В системе координат ОXcYcZc вектор  имеет одну составляющую
имеет одну составляющую  вдоль оси Yc, а радиус-вектор R - координаты хc, yc, zc.
вдоль оси Yc, а радиус-вектор R - координаты хc, yc, zc.
Тогда для вектора инерционной силы Fc будем иметь
где i, j, k - орты осей Хc, Yc и Zc.
Откуда  ;
;  ;
;  .
.
Вектор сопутствующего момента M1с
Составляющие вектора

Координаты OXcYcZc связаны с координатами OXYZ изделия матрицей (2) поворота вокруг оси Zc.
Откуда

Масса и координаты центра масс, входящие в выражения (17), известны из статических измерений.
Измерив амплитуды углового ускорения  , рассчитываются численные значения составляющих сопутствующего момента.
, рассчитываются численные значения составляющих сопутствующего момента.
В общем случае вектор Mи измеренного момента равен сумме Mп - позиционного, M1 - сопутствующего и M - полезного моментов. В результате полезный момент определяется разностью

В терминах метрологии моменты Мп и M1 являются поправками к измеренному Mи моменту, и основная проблема достижения точности измерения полезного момента заключается в уменьшении величины поправок.
Так, в известном решении (прототипе) поправка Мп превосходит полезный момент ~ в 1,5 раза, а поправка M1 - в (3÷5) раз. В результате полезный момент определяется как малая разность больших величин, что негативно сказывается на точности измерения полезного момента.
Предлагается новый способ измерений, позволяющий полностью избавиться от поправок и в «чистом виде» измерить полезный момент.
Позиционный и сопутствующий моменты, как следует из предыдущего, определяются векторным Мп=ΔR×Р и двойным векторным 
произведениями, откуда при ΔR=0 получим Мп=М1=0.
Равенство нулю разностного вектора ΔR означает совмещение НК 36 динамометрического элемента Мy с ЦМ 35 изделия.
Кроме того, при R=0 достигается равенство нулю момента M1, что означает совмещение ЦМ 35 изделия с осью вращения качалки.
Предлагается рациональный путь реализации условий равенства нулю моментов Мп и M1.
Для этого НК 36 динамометрического элемента Мy 6 с наклонными стойками совмещается с осью вращения Y0 (см. Измерительная техника, 1979, №11, стр.54, рис.4; Авт. свид. №186730. Бюл. изобрет. 1966 г., №9, стр.3).
Пользуясь тем, что начальное положение ЦМ 35 известно из статического режима измерений, перед началом динамических измерений координата z ЦМ 35 изделия 1 при помощи механизма вертикального перемещения адаптера 3 совмещается с осью вращения качалки 22.
Следует отметить, что абсолютная точность совмещения не имеет решающего значения. Для получения требуемой точности достаточно, чтобы величины поправок были существенно меньше полезного момента.
В качестве примера рассмотрим вариант изделия в виде пластины, являющейся динамическим аналогом модели вертикального хвостового оперения самолета.
Примем следующие размеры пластины (фиг.11):
l=1,7м;  ; h=0,025 м; Р=100 кгс.
; h=0,025 м; Р=100 кгс.
Пластина выполнена из дюралюминиевого листа  .
.
Моменты, действующие на пластину
На фиг.12 показана схема колебаний пластины вокруг оси Y0. Пластина представляет собой симметричное изделие с ЦM1, лежащим на оси Zc. В результате векторы R; ΔR и Rн также лежат на оси Zc. HK1 расположено ниже оси вращения.
Подобная компоновка принята в прототипе.
Угол отклонения пластины в функции времени
φ(t)=φ0cos27πf1t
где φ0 - начальный угол отклонения;
f1 - собственная частота колебаний.
Примем
φ0=10°; f1=1 Гц; zн=-0,8 м;  ; Δzc=zc-zн=1,65 м
; Δzc=zc-zн=1,65 м
Центральные моменты инерции пластины относительно осей X; Y; Z



Амплитуды составляющих вектора M полезного момента
 ;
; 

Полученные цифры характеризуют полезные измеряемые моменты.
Амплитуда составляющих вектора сопутствующего момента

Амплитуда составляющих вектора позиционного момента
Мпx=Мпy=Р·sinφ0·Δzc=28,6 кгс·м
Откуда сопутствующий момент M1 в 11,3 раза превосходит полезный Мy, а позиционный Мп в 1,7 раза.
Для того чтобы полностью избавиться от позиционного и сопутствующего моментов, в статическом режиме измерений определяется координата z ЦМ 35 изделия 1, затем адаптер 2 перемещает изделие 1 на расстояние -z. Тогда ЦМ 35 изделия 1 совпадет с осью вращения качалки 22 и моменты M1 и Мп окажутся равными нулю: M1=Мп=0.
Динамометрический элемент Мy 6
Данный элемент является наиболее ответственным измерительным элементом стенда.
Кроме измерения момента Мy, он переносит НК 36 на ось вращения качалки 22. От качества выполнения указанной операции зависит принципиальная возможность реализации предлагаемого изобретения.
На фиг.13 показана аксонометрическая проекция, а на фиг.15 приведен чертеж динамометрического элемента Мy.
Динамометрический элемент Мy состоит из четырех наклонных опорных стоек 42 и центральной сигнальной стойки 43. Стойки расположены между двумя жесткими основаниями 44 и 45. Все стойки имеют переменное сечение со ступенчатым профилем, состоящим из жестких и упругих участков. На упругие участки центральной сигнальной стойки 43 наклеены тензорезисторы R9, R10, R11 и R12, которые соединены в тензометрический измерительный мост 46, показанный на фиг.16.
Оси наклонных опорных стоек 42 пересекаются в точке, отстоящей на расстоянии lz от верхних корневых сечений стоек. Указанная точка пересечения осей является НК 36 динамометрического элемента Мy 6.
На фиг.14 показаны схема деформации стоек под действием момента My и векторы сил, действующих на стойки.
Динамометрический элемент Мy работает следующим образом.
Момент My уравновешивается парой сил F, которые раскладываются на
силы Fτ - действующие вдоль стоек, и Fn - действующие по нормали к стойкам.
Представляют интерес силы Fn, которые вызывают деформации центральной сигнальной стойки 43.

где α - полный угол между осями стоек 1;
Как следует из (20), расстояние lz, на которое можно перенести начало координат НК 36, ограничивается минимальной силой Fn, которую возможно измерить.
Примем следующие исходные данные:
Мy=21 кгс·м; L0=0,1м; x1=0,1 м; lz=0,9м.
В качестве материала ДЭ Му возьмем дюралюмин.
Конструкция из дюралюмина ~2,5 раза легче, чем та же конструкция из стали. Следовательно, гравитационные и инерционные силы, действующие на ДЭ Мy, будут в такое же число раз меньше.
Исследованиями установлено, что дюралюмин обладает высокими упругими свойствами и пригоден для изготовления динамометрических элементов. Модуль Юнга дюралюмина  .
.
Результаты расчета ДЭ My сведены в таблицу.
Указанная в таблице ширина крайней наклонной стойки b1=40 мм является суммарной для двух стоек, каждая из которых имеет ширину  .
.
Выходное напряжение тензометрического моста
ΔUMy=K·εMy·Uп
где K - коэффициент тензорезистора,
K=2
Uп - напряжение питания моста,
Uп=6 B
Откуда
ΔUMy=12·10-3 B
Разрешающая способность современной электронной измерительной аппаратуры составляет величину
δΔU ≤1·10-6 B
Откуда полная шкала прибора для измерения момента My составляет N=10000 делений, что является хорошим результатом.
Итак, предлагаемый стенд позволяет измерять массу, координаты центра масс и тензор инерции изделия с одной установки. Переход от трехстепенной к двухстепенной колебательной системе, совмещение начала координат динамометрического элемента с осью вращения качалки и введение механизма вертикального перемещения адаптера с изделием позволяет существенно повысить точность измерения тензора инерции изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для измерения массы, координат центра масс и моментов инерции изделий | 2024 |
|
RU2830397C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЯ | 2012 |
|
RU2506551C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЙ | 2013 |
|
RU2525629C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ИЗДЕЛИЯ | 2013 |
|
RU2562273C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРОВ МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЙ | 2022 |
|
RU2797387C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2596032C2 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2012 |
|
RU2593644C2 |
| Комплекс для определения инерционных характеристик с измерительной системой | 2017 |
|
RU2683800C2 |
Изобретение относится к области измерений массовых и инерционных характеристик элементов динамически подобных моделей самолетов, ракет и других тел. Устройство содержит адаптер, к которому крепится изделие, механизм вертикального перемещения и платформу поворота адаптера, динамометрическую платформу, динамометрические элементы Му и Mz, датчики угла, систему пружин, станину, два винтовых устройства задания колебаний. Механизм вертикального перемещения и платформа поворота адаптера в комплексе с динамометрическим элементом Му с наклонными стойками обеспечивают совмещение центра масс изделия и начала координат динамометрического элемента Му с осью горизонтальных шарниров. В результате полезный измеряемый момент Му оказывается свободным от позиционного и сопутствующего моментов. Последовательный поворот адаптера на фиксированные углы вокруг вертикальной оси в сочетании с измерениями моментов Му и Mz при колебаниях изделия позволяют определить все элементы тензора инерции. Технический результат заключается в расширении функциональных возможностей, упрощении конструкции, повышении точности измерений. 16 ил., 1 табл.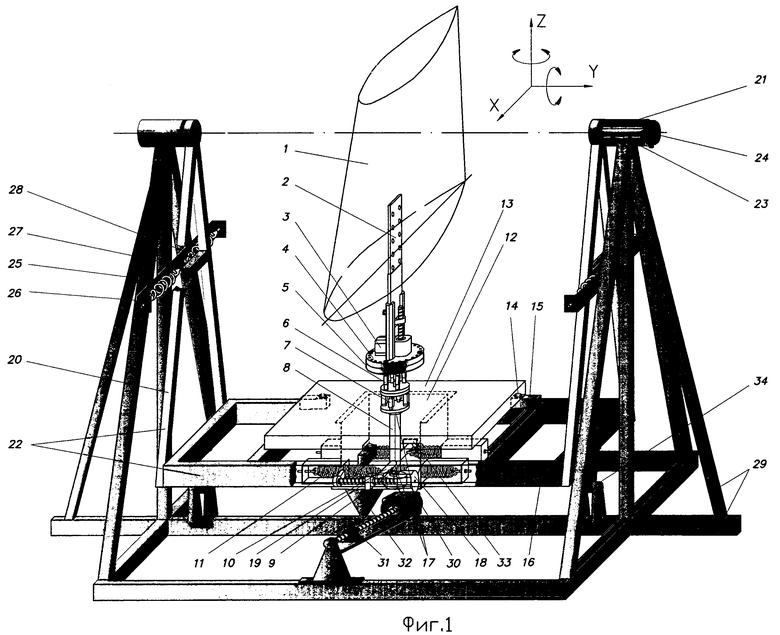
Стенд для измерения массы, координат центра масс и тензора инерции изделия, содержащий раму, динамометры, датчики угла, систему пружин, станину, динамометрическую платформу, узел поворота рамы, устройства задания колебаний, шарниры, отличающийся тем, что стенд снабжен механическим адаптером, к которому крепится изделие, механизмом вертикального перемещения адаптера, закрепленным на поворотной платформе, имеющей возможность поворачиваться относительно неподвижной платформы, валом, рычагом, двумя винтовыми механизмами задания колебаний, качалкой, включающей тяги с перемычками и раму, двумя динамометрическими элементами, один из которых, расположенный под неподвижной платформой, измеряет крутящий момент вокруг оси Y и состоит из четырех наклонных опорных и одной центральной сигнальной стоек, установлен на втором динамометрическом элементе, закрепленном соосно на верхнем торце вала и состоящем из двух опорных и двух сигнальных стоек, который измеряет крутящий момент вокруг оси Z, первым датчиком угла, соединенным с нижним торцом вала, двумя парами пружин, обеспечивающими с помощью первого винтового механизма колебания вала вокруг вертикальной оси Z и соединенными с рычагом и корпусом, расположенным под динамометрической платформой, закрепленной с помощью динамометров на раме, подвешенной на станине посредством четырех тяг на двух шарнирах, ось одного из которых соединена со вторым датчиком угла, и дополнительными двумя парами пружин, обеспечивающими с помощью второго винтового механизма колебания качалки вокруг горизонтальной оси Y, закрепленными на кронштейнах станины и на силовых пальцах, установленных на качалке, при этом центр масс изделия и начало координат динамометрического элемента, измеряющего крутящий момент вокруг оси Y, совмещены с осью шарниров.
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| Juha Toivola | |||
| Метод определения инерционных свойств абсолютно твердого тела по его частотному отклику | |||
| P.Co | |||
| Прибор для переработки спирта в газовую смесь для двигателей внутреннего сгорания | 1920 |
|
SU589A1 |
| Hiroshi Okuzumi | |||
| Определение характеристик абсолютно твердого тела по экспериментальной передаточной функции | |||
| // Центральная лаборатория | |||

