Область техники, к которой относится изобретение
Настоящее изобретение относится к расходомерам с несколькими хордами. Более конкретно, изобретение описывает варианты систем и способ определения конфигурации сбоев цикла сигнала в акустическом расходомере и машиночитаемый носитель информации, который может использоваться для осуществления указанного способа или для работы указанных систем.
Уровень техники
Извлеченные из недр жидкие или газообразные углеводороды (например, сырая нефть, природный газ) транспортируются по трубопроводам. Желательно располагать средствами точного измерения количества транспортируемой текучей среды; особенно это важно, если это количество должно точно учитываться при переходе прав собственности от одного владельца к другому. Для измерения количества текучей среды, протекающей по трубопроводу, могут применяться ультразвуковые расходомеры, обеспечивающие достаточную точность, требуемую при переходе прав собственности.
В ультразвуковом расходомере ультразвуковые сигналы посылаются через объем текучей среды в направлениях вдоль потока и против потока текучей среды, расход которой измеряется. Одним из параметров, измеряемых при определении расхода текучей среды, является время (момент) поступления ультразвукового сигнала к преобразователю. Но из-за шумов, возникающих в системах, транспортирующих текучие среды, а также недостатков, свойственных электронным системам ультразвуковых расходомеров, трудной задачей в некоторых ситуациях для электроники расходомера является постоянный выбор одной и той же особенности принимаемого акустического сигнала, которая обозначает момент поступления сигнала (далее - "маркирующей особенности"). В частности, в некоторых ситуациях особенность ультразвукового сигнала, которая идентифицирована при приеме как маркирующая, может оказаться сдвинутой во времени на один или несколько циклов сигнала относительно настоящей (истинной) маркирующей особенности. Когда особенность, выбранная электроникой как маркирующая момент поступления ультразвукового сигнала, отличается от истинной маркирующей особенности, говорят, что произошел переход на другую фазу, перескок цикла или сбой цикла.
Ситуация дополнительно может усложняться тем, что во многих ультразвуковых расходомерах имеется группа пар преобразователей, и каждая пара преобразователей осуществляет передачу и прием ультразвуковых сигналов. Особенность, идентифицированная как маркер момента прихода ультразвукового сигнала при работе первой пары преобразователей, может оказаться сдвинутой на один или несколько циклов с упреждением истинной маркирующей особенности, а особенность, идентифицированная как маркер при работе второй парой преобразователей, может оказаться сдвинутой на один или несколько циклов с опозданием относительно истинной маркирующей особенности. Фактически для ультразвукового расходомера, имеющего четыре пары преобразователей, если рассматривать только случаи правильной идентификации маркирующей особенности, неправильной идентификации маркирующей особенности с перескоком на один цикл перед истинной маркирующей особенностью и с перескоком на один цикл после истинной маркирующей особенности (три возможности), то возможны 34=81 различных комбинаций перескоков цикла (далее - "конфигураций сбоев цикла"). При столь большом числе возможных конфигураций сбоев цикла идентификация возникшей конфигурации сбоев цикла может оказаться трудной задачей, особенно при ограниченной вычислительной мощности электронных средств обработки сигналов.
Раскрытие изобретения
Настоящее изобретение описывает систему определения конфигурации сбоев цикла сигнала, включающую расходомер, корпус расходомера, определяющий центральный канал и связанный с трубопроводом, по которому протекает текучая среда, по меньшей мере четыре пары преобразователей, связанных с корпусом расходомера и установленных с возможностью передачи акустических сигналов через центральный канал, процессор, механически связанный с корпусом расходомера и электрически связанный по меньшей мере с четырьмя парами преобразователей, и блок памяти, электрически связанный с процессором и хранящий программу, выполняемую процессором, причем процессор выполнен с возможностью измерения времени распространения акустических сигналов через центральный канал в течение первого периода измерений и определения конфигурации сбоев цикла при измерении времени распространения сигнала между по меньшей мере четырьмя парами преобразователей в течение первого периода измерений, при выполнении указанной программы. Процессор может быть выполнен с возможностью вычисления набора значений, характерных для определенной конфигурации сбоев цикла при обмене сигналами между по меньшей мере четырьмя парами преобразователей, и оценки набора значений для определения конфигурации сбоев цикла, при выполнении указанной программы. Также процессор может быть выполнен с возможностью выбора по меньшей мере одного значения из группы, включающей максимум и минимум из набора значений, при оценке указанного набора значений и выполнении программы. Процессор может быть выполнен с возможностью изменения параметров определения момента поступления сигнала по меньшей мере одной пары преобразователей в зависимости от конфигурации сбоев циклов, при сбое цикла по меньшей мере одной пары преобразователей, при выполнении программы. Программа может быть выполнена с возможностью отмены корректировки времени распространения в зависимости от конфигурации сбоев цикла. Процессор также может быть выполнен с возможностью дополнительной корректировки значения времени распространения для первого периода измерений, в зависимости от конфигурации сбоев цикла, при выполнении программы. Кроме того, процессор может быть выполнен с возможностью корректировки значения времени распространения для второго периода измерений, в зависимости от конфигурации сбоев цикла, при выполнении программы. Дополнительно процессор может быть выполнен с возможностью корректировки значения времени распространения для второго периода измерений, следующего за первым периодом измерений, при выполнении программы.
Другой вариант изобретения описывает систему определения конфигурации сбоев цикла сигнала, включающую расходомер, снабженный группой пар преобразователей, процессор, блок памяти, связанный с процессором и хранящий программу, выполняемую процессором, коммуникационный порт, связанный с процессором, причем процессор выполнен с возможностью приема измеренных значений расхода текучей среды от расходомера посредством коммуникационного порта и постоянного накопления текущих итоговых данных о потоке текучей среды через расходомер в течение определенного промежутка времени, приема от расходомера измеренных значений времени распространения акустических сигналов между группой пар преобразователей расходомера и определения конфигурации сбоев цикла при измерениях времени распространения сигналов, при выполнении указанной программы. Программа может быть выполнена с возможностью изменения параметров определения расходомером времени поступления сигнала по меньшей мере одной пары преобразователей в зависимости от конфигурации сбоев цикла. Дополнительно программа может быть выполнена с возможностью отмены корректировки результатов измеренного времени распространения. Программа может быть выполнена с возможностью корректировки значения измеренного времени распространения в зависимости от конфигурации сбоев цикла. Также программа может быть выполнена с возможностью корректировки значения измеренного времени распространения для второго периода измерений, следующего за первым периодом измерений, учитывающей конфигурацию сбоев цикла в первом периоде измерений. Кроме того, программа может быть выполнена с возможностью определения конфигурации сбоев цикла, вычисления набора значений, характерных для определенной конфигурации сбоев цикла и оценки набора значений для определения конфигурации сбоев цикла.
Также изобретение описывает способ определения конфигурации сбоев цикла сигнала в расходомере, включающий передачу акустических сигналов через текучую среду, протекающую через расходомер, снабженный группой пар преобразователей, и между соответствующими преобразователями группы пар преобразователей, измерение времени распространения акустических сигналов между соответствующими преобразователями группы пар преобразователей, вычисление набора значений погрешностей, в котором каждое значение погрешности характерно для конфигурации сбоев цикла при измерении времени распространения акустических сигналов, и определение конфигурации сбоев цикла, при котором по меньшей мере частично используют набор значений погрешностей. Способ может дополнительно включать изменение параметров определения момента поступления сигнала в зависимости от определенной конфигурации сбоев цикла. Кроме того, способ может дополнительно включать отмену корректировки измерения времени распространения. Также способ может дополнительно включать корректировку измеренного времени распространения акустических сигналов в зависимости от конфигурации сбоев цикла. Способ дополнительно включает корректировку измеренного времени распространения акустических сигналов для второго периода измерений времени распространения в зависимости от конфигурации сбоев цикла в первом периоде измерений времени распространения, предшествующем второму периоду измерений.
Кроме того, изобретение описывает машиночитаемый носитель информации, на котором хранится программа для процессора, выполненного с возможностью при ее выполнении вычисления набора значений, каждое из которых характерно для конфигурации сбоев цикла при измерении времени распространения звукового сигнала через текучую среду в расходомере, определяет конфигурация сбоев цикла с учетом по меньшей мере частичным, указанного набора значений. Процессор может быть выполнен с возможностью изменения параметров определения момента поступления сигнала для по меньшей мере одной пары преобразователей, в зависимости от конфигурации сбоев цикла, при выполнении указанной программы. Также процессор может быть выполнен с возможностью корректировки значения времени распространения в зависимости от конфигурации сбоев цикла, при выполнении указанной программы. Кроме того, процессор может быть выполнен с возможностью корректировки значения времени распространения в последующем периоде измерений, в зависимости от конфигурации сбоев цикла в предшествующем периоде измерений, при выполнении указанной программы.
Краткое описание чертежей
Далее при подробном описании вариантов изобретения, взятых в качестве примеров, используются ссылки на следующие сопровождающие чертежи:
На фиг.1 показан вид сбоку в разрезе расходомера, соответствующего по меньшей мере некоторым вариантам осуществления;
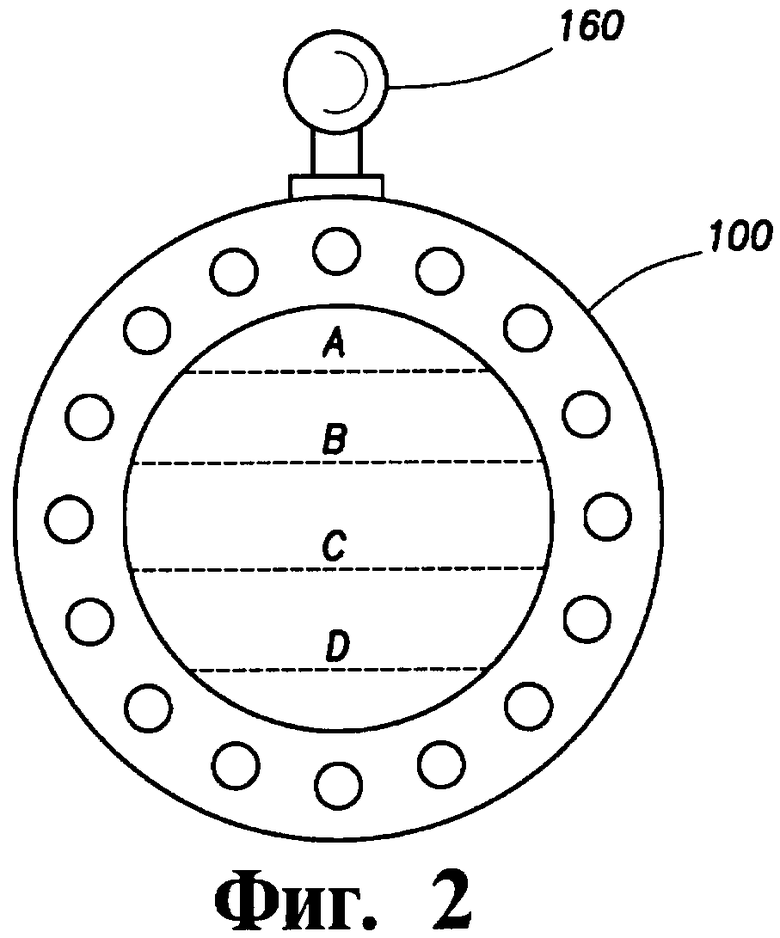
На фиг.2 показано поперечное сечение расходомера, соответствующего по меньшей мере некоторым вариантам осуществления;
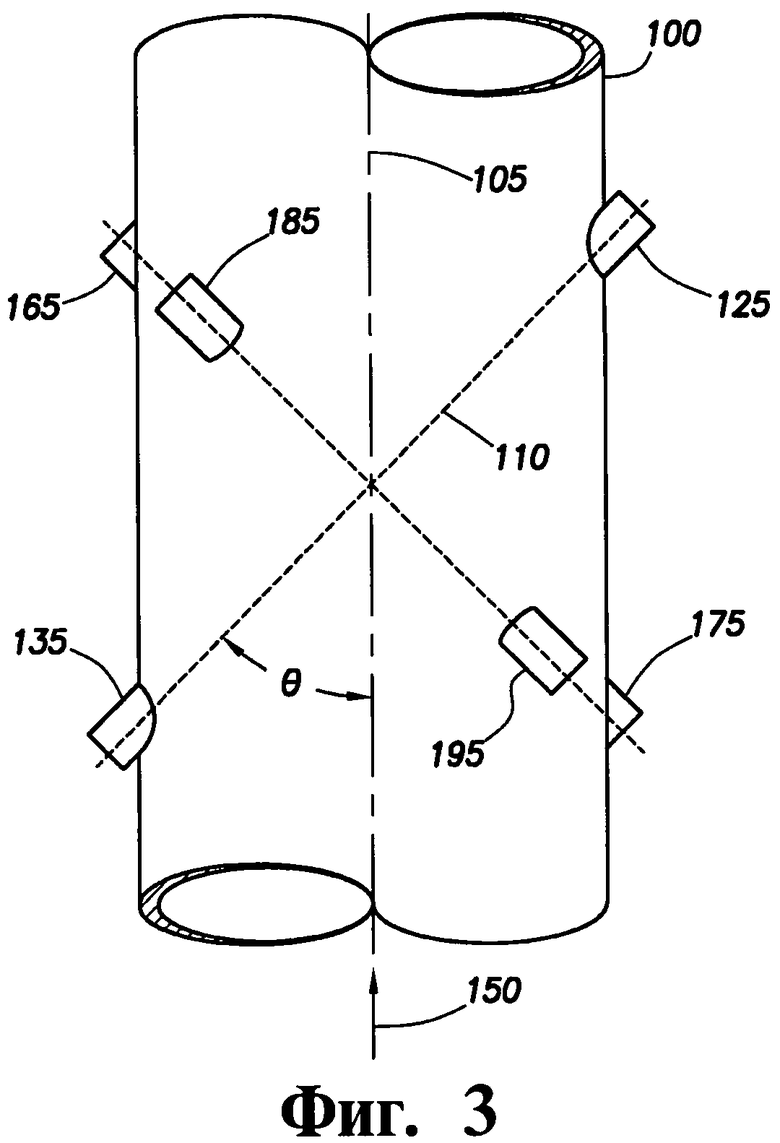
На фиг.3 показан вид сверху расходомера, соответствующего по меньшей мере некоторым вариантам осуществления;
На фиг.4 с целью объяснений показан пример полученного сигнала, в соответствии по меньшей мере с некоторыми вариантами осуществления;
На фиг.5 показаны электронные средства расходомера, в соответствии по меньшей мере с некоторыми вариантами осуществления;
На фиг.6 показана система, включающая вычислительное устройство для вычисления расхода текучей среды (далее - "вычислитель расхода"), в соответствии по меньшей мере с некоторыми вариантами осуществления; и
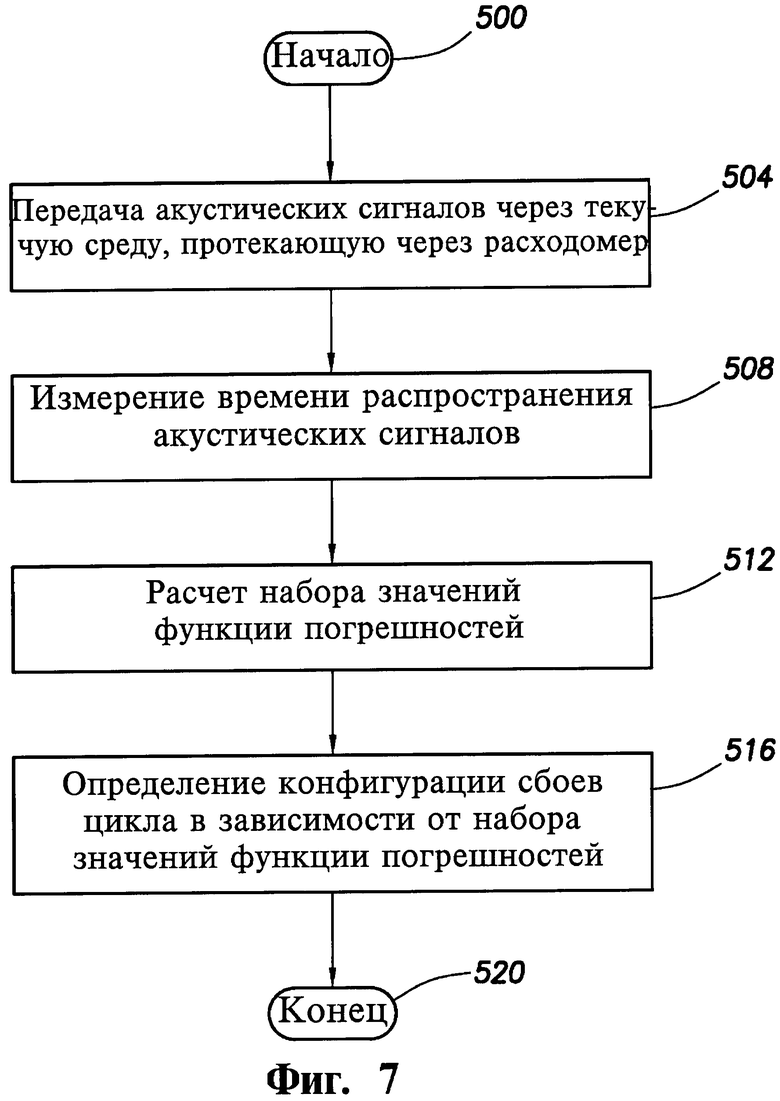
На фиг.7 показан способ, соответствующий способу определения конфигурации сбоев, в соответствии по меньшей мере с некоторыми вариантами осуществления.
Осуществление изобретения
Некоторые термины используются всюду далее в описании и формуле изобретения для обозначения конкретных компонент системы. Как известно специалистам в данной области, различные компании, производящие расходомеры, могут ссылаться на одинаковые компоненты, используя различные термины. В данном документе компоненты, отличающиеся по наименованию, но не по функциям, различаться не будут.
В следующем далее обсуждении и в формуле изобретения термины "включает" и "содержит" используются не в ограничительном смысле и поэтому должны пониматься как означающие следующее: "включает…, но этот перечень не является ограничивающим".
Кроме того, термины "соединение" и "связь" означают как непосредственные, так и опосредованные соединения или связи.
Так, если первое устройство соединено со вторым, то соединение может быть как непосредственным, так и опосредованным, осуществляемым через другие устройства и соединения.
Различные варианты осуществления разработаны применительно к ультразвуковым расходомерам с четырьмя хордами, по которым распространяется сигнал, и описание исходит из этого контекста. Но описанные системы и способы могут использоваться в любых акустических расходомерах с несколькими хордами (многолучевых), и следовательно, контекст разработки и описание не должны рассматриваться как ограничивающие область применения изобретения только ультразвуковыми расходомерами с четырьмя хордами.
На фиг.1 показан ультразвуковой расходомер 101 для объяснения различных компонент расходомера и связей между ними. Измерительная муфта 100, выполненная с возможностью установки между секциями трубопровода, имеет заранее заданный размер и определяет центральный канал, по которому проходит текучая среда, расход которой измеряется. Выбранная для иллюстрации пара преобразователей 120 и 130 и соответствующе им корпуса 125 и 135 разнесены по длине муфты 100. Преобразователи 120 и 130 - акустические приемопередатчики, в частности ультразвуковые приемопередатчики, которые могут посылать и принимать акустические сигналы с частотами, превышающими примерно 20 кГц. Акустические сигналы могут генерироваться и приниматься пьезоэлектрическим элементом, имеющимся в каждом преобразователе. При генерации ультразвукового сигнала пьезоэлектрический элемент стимулируется синусоидальным электрическим сигналом, возбуждающим вибрацию элемента. При вибрации пьезоэлектрического элемента генерируется акустический сигнал, который распространяется через текучую среду, расход которой измеряется, к соответствующему преобразователю пары преобразователей. Симметричным образом, при воздействии акустического сигнала принимающий пьезоэлектрический элемент вибрирует, генерируя синусоидальный электрический сигнал, который считывается, преобразуется в цифровую форму и анализируется электронными средствами, связанными с расходомером.
Отрезок 110, называемый хордой, проходит между преобразователями 120 и 130 (выбранными для иллюстрации) под некоторым углом к оси 105. Длина хорды 110 равна расстоянию между фронтальной поверхностью преобразователя 120 и фронтальной поверхностью преобразователя 130. В точках 140 и 145 акустические сигналы, генерируемые преобразователями 120 и 130, проходят из текучей среды, протекающей через муфту 100, в кристалл датчика. Положение преобразователей 120 и 130 может быть задано углом Q, первым расстоянием L, равным расстоянию между преобразователями 120 и 130, вторым расстоянием X, равным расстоянию между точками 140 и 145, измеренным вдоль оси, и третьим расстоянием D, равным внутреннему диаметру трубы. В большинстве случаев расстояния D, Х и L точно определяются при изготовлении расходомера. Преобразователи, например 120 и 130, размещаются обычно на определенном расстоянии от точек 140 и 145 соответственно, независимо от размеров расходомера (то есть, размеров муфты). Текучая среда, например природный газ, протекает в направлении 150. Показан профиль 152 скоростей текущей среды. Векторы 153-158 скорости показывают, что скорость газа, протекающего через муфту 100, увеличивается при приближении к оси 105 муфты 100.
Сначала расположенный ниже по потоку текущей среды (далее - "нижний") преобразователь 120 генерирует ультразвуковой сигнал, распространяющийся в направлении расположенного выше по потоку (далее - "верхнего") преобразователя 130 и достигающий его. Через некоторое время верхний преобразователь 130 генерирует ответный ультразвуковой сигнал, распространяющийся в направлении нижнего преобразователя 120 и достигающий его. Таким образом, обмен ультразвуковыми сигналами 115 между преобразователями 120 и 130 вдоль хорды 110 можно сравнить с подачей бейсбольного мяча и его захватом ловушкой. При функционировании расходомера описанная последовательность действий может повторяться тысячи раз в минуту.
Время распространения ультразвукового сигнала 115 между преобразователями 120 и 130 частично зависит от того, в каком направлении распространяется ультразвуковой сигнал 115, - по потоку или против потока текучей среды. Время распространения ультразвукового сигнала по потоку (то есть, в том же направлении, в каком протекает текучая среда) меньше, чем время распространения против потока (то есть, в направлении, противоположном направлению потока текучей среды). Значения времени распространения сигнала по потоку и против потока могут использоваться для определения средней по всему пути прохождения сигнала скорости потока и скорости звука в текучей среде. При известных размерах поперечного сечения расходомера, через который проходит текучая среда, значение средней скорости текучей среды может использоваться для расчета объема текучей среды, проходящей через муфту 100.
В ультразвуковых расходомерах может быть предусмотрен один путь (луч) или несколько путей распространения акустических сигналов. На фиг.2 показано поперечное сечение одной стороны многолучевого ультразвукового расходомера. В ультразвуковом расходомере, показанном на фиг.2, используются четыре хорды А, В, С и D, расположенные на различных уровнях внутри муфты 100. Каждая хорда A-D соответствует паре преобразователей, поочередно работающих в качестве передатчика и приемника. Показан также корпус 160 управляющего электронного устройства (далее - контроллера), которое управляет получением и обработкой данных, соответствующих четырем хордам A-D. Четыре пары преобразователей, соответствующих хордам A-D, на фиг.2 не показаны.
Расположение четырех пар преобразователей легко понять, обратившись к фиг.3. На муфте 100 установлены четыре пары портов преобразователей. Каждая пара портов преобразователей соответствует одной хорде на фиг.2. Первая пара портов 125 и 135 преобразователей содержит преобразователи 120 и 130 (фиг.1), несколько заглубленные относительно поверхности муфты 100. Преобразователи установлены не перпендикулярно оси 105 муфты, а под определенным острым углом к ней. Другая пара портов 165 и 175 преобразователей (показаны лишь частично) и соответствующие им преобразователи установлены так, что хорды расположены, в общем, крестообразно относительно друг друга, но хорда между портами 165 и 175 находится на определенном расстоянии от хорды между портами 125 и 135. Аналогично, порты 185 и 195 преобразователей расположены в канале или муфте параллельно портам 165 и 175 преобразователей, но на другом уровне (то есть, на другом расстоянии от оси). На фиг.3 не показана явно четвертая пара преобразователей и портов преобразователей. При одновременном рассмотрении фиг.2 и 3 видно, что пары преобразователей размещаются так, что две верхние (на чертеже) пары преобразователей, соответствующие хордам А и В, расположены крестообразно, и две нижние пары преобразователей, соответствующих хордам С и D, также расположены крестообразно. Для каждой из хорд A-D может быть определена скорость потока, соответствующая хорде (далее - "хордальная скорость"). Комбинируя значения хордальных скоростей, можно определить среднюю скорость потока для канала в целом. По средней скорости потока можно определить количество текучей среды, прошедшей через муфту, то есть по трубопроводу.
На фиг.5 показан контроллер 200 ультразвукового расходомера, соответствующий по меньшей мере некоторым вариантам осуществления. Контроллер 200 может быть стационарно установлен в корпусе 160 контроллера, показанном на фиг.2, и корпус 160 контроллера может прикрепляться к муфте. Альтернативно, корпус 160 контроллера может быть установлен в непосредственной близости (то есть, в пределах нескольких футов) от муфты. Контроллер 200 включает процессор 202, связанный с блоком 204 памяти с произвольным доступом или запоминающим устройством с произвольным доступом (RAM, или ЗУПД), постоянным запоминающим устройством 206 (ROM, или ПЗУ) и коммуникационным портом 208. Процессор 202 - устройство, выполняющее программы решения задач, свойственных различным вариантам. ПЗУ 206 служит для постоянного хранения программ операционной системы и программ, необходимых для реализации различных вариантов. ЗУПД 204 представляет собой оперативное запоминающее устройство (ОЗУ) процессора 202, и некоторые программы и/или структуры данных перед выполнением программ могут быть скопированы из ПЗУ 206 в ЗУПД 204. В альтернативных вариантах осуществления может осуществляться прямой доступ к группе программ и структур, хранимым в ПЗУ 206. Коммуникационный порт 208 - устройство, через которое расходомер связан с системами более высокого уровня, например с вычислителем расхода (который может интегрировать данные о расходе текучей среды, получаемые от группы расходомеров) и/или системой сбора данных. Хотя процессор 202, ЗУПД 204, ПЗУ 206 и коммуникационный порт 208 показаны как отдельные устройства, в альтернативных вариантах осуществления могут использоваться микроконтроллеры, в которых интегрированы процессорное ядро, ЗУПД, ПЗУ и коммуникационные порты.
Процессор 202, далее, соединяется с несколькими управляемыми им устройствами, чтобы обеспечить передачу/прием акустических сигналов через текучую среду, расход которой измеряется. В частности, процессор 202 соединен с приводным механизмом 210 преобразователей, приемником 212 и двумя мультиплексорами 214 и 216 линиями 218 и 220 управления соответственно. В некоторых вариантах осуществления приводной механизм 210 преобразователей содержит схемы генератора и усилителя. Приводной механизм 210 преобразователей в этих вариантах осуществления генерирует исходный сигнал, усиливает его до мощности, достаточной для управления преобразователями, и обеспечивает согласование сопротивлений относительно преобразователей. В других вариантах приводной механизм преобразователей принимает сигнал (переменный ток выбранной частоты) от процессора 202, усиливает его и обеспечивает согласование сопротивлений относительно преобразователей. Приемник 212 также быть выполнен во многих различных формах. В некоторых вариантах осуществления приемник 212 - это аналого-цифровой преобразователь, который получает на входе имеющий форму волны аналоговый сигнал, созданный преобразователем и являющийся представлением принятого акустического сигнала, а также преобразует этот сигнал в цифровую форму. В некоторых случаях приемник 212 может фильтровать и/или усиливать сигнал до или после его преобразования в цифровую форму. Цифровая версия полученного сигнала может затем передаваться процессору 202 для идентификации маркирующей особенности сигнала (что обсуждается ниже более подробно). В дополнительных вариантах приемник 212 может полностью или частично выполнять идентификацию маркирующей особенности сигнала.
Процессор 202, выполняя программу, выборочно управляет мультиплексорами 214 и 216, поддерживая связь преобразователей каждой пары 222 преобразователей с приводным механизмом 210 преобразователей (для управления преобразователем при возбуждении акустического сигнала) и с приемником 212 (для приема электрического сигнала, созданного преобразователем по акустическому сигналу). В некоторых вариантах процессор 202 в течение периода измерений длительностью 1 секунда заставляет каждую пару преобразователей послать приблизительно 30 акустических сигналов в направлении против потока и 30 акустических сигналов - в направлении по потоку. Могут использоваться также группы акустических сигналов, посылаемых по потоку и против потока, содержащие большее или меньшее число акустических сигналов для каждой пары преобразователей, а также более длительные или менее длительные периоды измерений.
Продолжая рассматривать фиг.5, сосредоточим внимание на паре 222А преобразователей, которая будет служить представителем всех пар 222 преобразователей. Для целей данного обсуждения преобразователь 224 будет рассматриваться как передатчик, а преобразователь 226 - как приемник, однако при реальном функционировании системы преобразователи поочередно меняются ролями. Под управлением процессора 202 приводной механизм 210 преобразователей связан через мультиплексоры 214 и 216 с преобразователем 224. Электрический сигнал, сгенерированный и/или усиленный приводным механизмом 210 преобразователей, воздействует на пьезоэлектрический элемент преобразователя 224 и возбуждает его колебания, а преобразователь 224, в свою очередь, генерирует акустический сигнал. Акустический сигнал распространяется от преобразователя 224 к преобразователю 226 в потоке текучей среды, расход которой измеряется. Для лучшего восприятия изображения взаимное расположение преобразователей пары 222А, находящихся на одной оси, на фиг.5 не показано, но при функционировании преобразователи пары расположены, в общем, на одной оси, как показано на фиг.1. В течение времени распространения акустического сигнала между преобразователем 224 и преобразователем 226 процессор 202 изменяет конфигурацию мультиплексоров 214 и 216, устанавливая связь между преобразователем 226 и приемником 212. Преобразователь 226 принимает акустический сигнал, и электрический сигнал, соответствующий полученному акустическому сигналу, поступает к приемнику 212. Процессор 202 отмечает время, когда приводной механизм 210 преобразователей выдает команду генерации ведущего сигнала, и процессор 202, анализируя сигнал, полученный приемником 212, отмечает момент, когда в сигнале обнаруживается выбранная маркирующая особенность.
Общее время, измеряемое процессором 202, включает не только время распространения через текучую среду акустического сигнала между преобразователями 224 и 226 (выбранными в качестве примера), но и задержки при прохождении электрических сигналов через контроллер 200 и связанные с ним соединения (например, задержки при прохождении сигнала через мультиплексоры 214 и 216 и по линиям, соединяющим мультиплексор 216 с преобразователями). При реализации различных вариантов задержки сигналов заранее известны или же могут быть определены, и следовательно, учтены при определении фактического времени распространения. Для различных вариантов представляет интерес выбор особенности полученного сигнала, маркирующей момент поступления акустического сигнала.
На фиг.4 показан пример полученного сигнала 300 в виде функции времени; пример позволяет обсудить выбор конкретной особенности сигнала, маркирующей момент поступления сигнала. В частности, в полученном сигнале 300 имеется участок 302 первого изменения, за которым следуют четыре прохождения 304, 306, 308 и 310 сигнала через нуль в отрицательном направлении. В соответствии по меньшей мере с некоторыми вариантами осуществления, в качестве маркирующей особенности можно выбрать второе прохождение 306 через нуль в отрицательном направлении. Но пример, показанный на фиг.3, является идеализированным. На практике наличие акустических шумов в потоке текучей среды, расход которой измеряется, и недостатки способов преобразования электрической энергии в акустическую (и наоборот) затрудняют идентификацию конкретного прохождения через нуль. Поэтому при определенных условиях процессор 202 может ошибочно идентифицировать определенное прохождение через нуль как маркирующую особенность. Неправильная идентификация определенного прохождения через нуль как маркирующей особенности будет называться перескоком цикла, или сбоем цикла. Например, из-за шумов и других помех и/или недостатков процессор 202 может ошибочно идентифицировать определенное прохождение 304 через нуль как маркирующую особенность. Для целей данного раскрытия будем называть отрицательным сбоем цикла ошибочную идентификацию в качестве маркирующей особенности такого прохождения через нуль, которое предшествует истинной маркирующей особенности. В других случаях из-за шума и/или других помех и недостатков процессор 202 может ошибочно идентифицировать в качестве маркирующей особенности прохождение 308 через нуль или прохождение 310 через нуль. Для целей данного раскрытия будем называть положительным сбоем цикла ошибочную идентификацию как маркирующей особенности такого прохождения через нуль, которое следует за истинной маркирующей особенностью.
Как сказано выше, одним из параметров, представляющих интерес при расчете расхода текущей среды, проходящей через ультразвуковой расходомер, является время распространения акустического сигнала между двумя преобразователями пары преобразователей. Особенность, идентифицируемая как маркирующая момент поступления акустического сигнала, играет важную роль при определении времени распространения сигнала. Например (см. фиг.4), если имеет место отрицательный сбой цикла (например, выбрано прохождение 304 через нуль, а не прохождение 306), то измеренное время распространения будет на один период акустического сигнала (то есть, длительность полного цикла) меньшим, чем фактическое время распространения сигнала. Аналогично, если имеет место положительный сбой на один цикл (например, если выбрано прохождение 308 через нуль), то измеренное время распространения окажется на один период акустического сигнала большим, чем фактическое время распространения. Для иллюстрации рассмотрим группу преобразователей, работающих на частоте 125 кГц, при которой длительность периода акустического сигнала составляет приблизительно 8 микросекунд. Таким образом, отрицательный сбой на один цикл уменьшит измеренное время распространения приблизительно на 8 мкс, а положительный сбой на один цикл увеличит измеренное время распространения приблизительно на 8 мкс. Хотя эти различия невелики, они неблагоприятно сказываются на оценке времени распространения.
Чтобы проверять, имел ли место сбой цикла, была построена функция η, которая сравнивает измеренные скорости звука (непосредственно связанные с измеряемым временем распространения) для двух хорд различной длины и вырабатывает определенное значение, по которому можно определить, имел ли место сбой цикла. В частности, функция η может иметь следующую форму:

где LA и LB - длины хорд А и В соответственно, cB и cA - измеренные скорости звука для хорд В и А соответственно. Аналогичные функции η могут быть определены для пар хорд В и D, С и А и С и D. Если никакой сбой цикла не имеет места, то скорость звука для всех хорд должна быть одинаковой, и значение функции η, в идеальном случае, должно быть равно нулю. На практике акустический шум, электрические и другие помехи/недостатки могут сделать значение η ненулевым, но оно все же будет малым, если не произошел сбой цикла. С другой стороны, если для какой-либо из хорд, взятых для сравнения, имел место сбой цикла, то измеренная скорость звука для этой хорды соответствующим образом изменится, и η примет относительно большое ненулевое значение (по сравнению со значением η в отсутствии сбоев цикла). Таким образом, большое значение η указывает на то, что имел место сбой цикла по меньшей мере для одной из двух хорд, для которых было рассчитано значение η, а величина и знак η показывают, отрицательным или положительным был сбой цикла. Величина η выражается одним числом, хотя и основана на информации, относящейся к двум хордам. Если значение η указывает на наличие сбоя цикла, то трудно определить, имел ли место сбой цикла на одной хорде или на обеих хордах, а также был ли сбой цикла положительным или отрицательным для каждой из хорд. Проблема еще более осложняется, если рассматривается расходомер с четырьмя хордами, который мы взяли в качестве примера.
Комбинации сбоев цикла на всех хордах расходомера для целей данного описания и формулы изобретения будем называть конфигурациями сбоев цикла при приеме сигнала. Конфигурации сбоев цикла включают случай, когда ни на одной из хорд не произошел сбой цикла. Число возможных конфигураций сбоев цикла равно числу особенностей, которые могут быть идентифицированы как маркирующие, возведенному в степень, показатель которой равен числу хорд. Например, если рассматривать только особенности, которые могут быть идентифицированы как маркирующие, то отсутствие сбоя цикла, сбой на один цикл до истинной маркирующей особенности и сбой на один цикл после истинной маркирующей особенности дают три возможности, и если в расходомере используются четыре хорды, то при приеме возможны 34=81 различные конфигурации сбоев цикла. Если, кроме того, учитывается и возможность сбоя на два цикла после истинной маркирующей особенности, то для расходомера с четырьмя хордами при приеме возможны 44=256 различных конфигураций сбоев цикла.
Хотя вычисление по данным для двух хорд значения η, выполняемое с целью лишь установить наличие или отсутствие сбоев цикла, является относительно простым, каждое отдельное значение η не идентифицирует хорды, на которых произошел сбой цикла, и для определения конфигурации сбоев цикла для всей группы хорд необходимо выполнить группу вычислений η. Время, требуемое для вычисления значений η для всех возможных конфигураций сбоев цикла, может оказаться слишком большим для процессора ограниченной мощности, имеющегося в ультразвуковом расходомере. Кроме того, возможность получения ненулевых значений η, обусловленных шумом (даже при отсутствии сбоев цикла), требует задания определенных пороговых значений, с которыми должны сравниваться значения η при определении наличия или отсутствия сбоев цикла; такие пороговые значения могут быть выбраны ошибочно. Чтобы устранить указанные недостатки, свойственные определению конфигурации сбоев цикла, вычисляют (в различных вариантах) набор функций погрешностей, и каждая функция погрешностей является характерной для конкретной конфигурации сбоев цикла. Оценивая значения функций погрешностей, можно определить конфигурацию сбоев цикла. Описание далее переходит к построению определенной функции погрешностей, применимой по меньшей мере в некоторых вариантах осуществления.
Вывод выражения для функции погрешностей, выбранной в качестве примера, основан на зависимости вычислений скорости звука от сбоев цикла. В частности, скорость звука, измеренная для конкретной хорды ультразвукового расходомера, может принять такую форму

где с - скорость звука, L - длина хорды, ТUp - время распространения сигнала против потока, ТDn - время распространения сигнала по потоку. Погрешности в значении измеренной скорости звука, вызванные погрешностями в оценке времени распространения, описываются выражением

где Δc - погрешность в значении измеренной скорости звука, а ΔTUp и ΔTDn - погрешности в значениях времени распространения в направлении против потока и по потоку соответственно. По сравнению с погрешностями в оценке времени распространения, обусловленными сбоями цикла, разность между временем распространения сигнала в направлении против потока и по потоку относительно мала. Таким образом, значения времени распространения против потока и по потоку могут быть аппроксимированы, с целью учета вычислительных погрешностей в скорости звука, вызванных сбоем цикла, следующим образом: TUp≅TDn≅L/c. Использование аппроксимации, предполагающей, что значения времени распространения против потока и по потоку приблизительно равны, позволяет упростить выражение 3 таким образом

где ε - средняя погрешность в оценке времени распространения, которая определена так, чтобы выражать среднюю погрешность для двух значений времени распространения - против потока и по потоку. Измеренная скорость cA звука для хорды А может тогда быть выражена так

где εA - средняя погрешность в оценке времени распространения для хорды А. Аналогичные выражения существуют для хорд В, С, и D. Используя выражение (5) для скорости звука и применяя его к каждой из четырех хорд данного примера, можно переписать выражение (1) так:


Выражение (6) может быть упрощено с помощью алгебраических преобразований числителя и аппроксимации знаменателя второго сомножителя правой части (6) выражением с2, если средние погрешности в оценке времени распространения малы. С помощью алгебраических преобразований и аппроксимации выражение (6) может быть записано таким образом

Выражение (7) может быть затем упрощено так

Величину, определяемую выражением (8), мы ниже называем теоретической функцией η (обозначение: ηTheory), так как выражение может использоваться для теоретического представления значения η, основанного на предположительных (условно принятых) средних погрешностях в оценке времени распространения. Выражение (8) относится только к хордам А и В, но подобные выражения можно записать и для хорд С и А, а также для хорд С и D.
Погрешности в оценке времени распространения, вызванные сбоем цикла, непосредственно связаны с периодом (временем одного полного цикла) акустических сигналов. Снова рассмотрим выбранную в качестве примера группу преобразователей, работающих на частоте 125 кГц, при которой один период акустического сигнала составляет приблизительно 8 микросекунд. Таким образом, для данного примера, в котором частота акустического сигнала равна 125 кГц, один отрицательный сбой цикла дает погрешность ε в оценке времени распространения сигнала, приблизительно равную - 8 мкс, а один положительный сбой цикла дает погрешность ε в оценке времени распространения, приблизительно равную 8 мкс.
Для расходомера, в котором используются четыре хорды, если принять во внимание возможные результаты конкретного измерения времени распространения, включающие отрицательный сбой на один цикл, отсутствие сбоев цикла и положительный сбой на один цикл, число возможных конфигураций сбоев цикла, с учетом всех четырех хорд, как и раньше, равно 81. Таким образом, если не усложнять описание, можно составить следующую таблицу (таблица 1), содержащую в разделе "Конфигурация сбоев цикла" определенное подмножество возможных конфигураций сбоев цикла, а в разделе "Средняя погрешность в оценке времени распространения" - средние погрешности в оценке времени распространения сигнала для этого подмножества; предполагается, что частота акустического сигнала равна 125 кГц, и период, следовательно, равен 8 мкс.
В частности, значение "-1" в разделе таблицы "Конфигурация сбоев цикла" указывает, что произошел отрицательный сбой на один цикл, значение "0" указывает на отсутствие сбоев цикла, значение "1" указывает, что произошел положительный сбой на один цикл, и значение "2" указывает, что произошел положительный сбой на два цикла. В разделе "Средняя погрешность в оценке времени распространения" указывается средняя погрешность ε в оценке времени распространения при соответствующей конфигурации сбоев цикла.
Рассмотрим, например, вторую строку таблицы. Набор чисел {1, 1, 0, 0, 0, 0, 0, 0} описывает одну из возможных конфигураций сбоев цикла для случая четырех хорд (учитываются акустические сигналы, распространяющиеся как против потока, так и по потоку), причем измеренные значения времени распространения сигнала как против потока, так и по потоку для хорды А оказались сдвинутыми во времени на один период в положительном направлении, то есть имеет место положительный сбой цикла (иначе говоря, измеренные значения времени распространения оказались большими, чем фактические, по меньшей мере на 8 мкс), а для остальных хорд время распространения сигнала в направлениях против потока и по потоку было измерено без сбоя цикла. Как обсуждалось выше, величина ε определена как средняя величина для двух погрешностей - погрешности в оценке времени распространения сигнала против потока и погрешности в оценке времени распространения по потоку. Для взятой в качестве примера второй строки таблицы 1 среднее значение погрешности в оценке времени распространения против потока (8 мкс) и погрешности в оценке времени распространения по потоку (8 мкс), очевидно, составляет 8 мкс, то есть, εA=8 мкс, а остальные значения средних погрешностей в оценке времени распространения равны нулю. Повторяя сказанное, заметим, что хотя каждая строка в разделе "Конфигурация сбоев цикла" таблицы описывает одну из возможного конфигураций сбоев цикла для расходомера с четырьмя хордами, таблица 1 не исчерпывает все случаи.
Используя предположительные (условно принятые) средние погрешности в оценке времени распространения из таблицы 1 для каждой из возможных конфигураций сбоев цикла (из той же таблицы), можно рассчитать набор теоретических значений η, используя выражение (8), приведенное выше. Значения η, вычисленные с использование средних погрешностей в оценке времени распространения из таблицы 1, являются теоретическими в том смысле, что средние погрешности в оценке времени распространения из таблицы 1 выражают, какими должны были бы оказаться средние погрешности в оценке времени распространения, если бы в расходомере происходили сбои цикла в той конфигурации, к которой относятся средние погрешности в оценке времени распространения. Таблица 2, приведенная ниже, включает разделы "Конфигурация сбоев цикла" и "Средняя погрешность в оценке времени распространения" таблицы 1, а также теоретические значения η, рассчитанные с помощью выражения (8), в котором средние погрешности в оценке времени распространения взяты из таблицы, а длины хорд полагаются такими: LB≅LC≅1,6LA≅1,6LD.
Для второй строки, которую мы выбрали в качестве примера, конфигурация сбоев цикла представляет собой набор {1, 1, 0, 0, 0, 0, 0, 0}, а теоретические значения η, рассчитанные с использованием выражения (8), равны {21, 0, 21, 0}.
В соответствии с различными вариантами осуществления, для каждой из возможных конфигураций сбоев цикла рассчитываются значения функции погрешностей или, кратко, значения погрешностей, учитывающие теоретические значения г) для этой конфигурации сбоев цикла, и фактические значения η для расходомера. В соответствии с определенными вариантами, функция погрешностей принимает такую форму

где Е (ε, с) - погрешность, выраженная как функция от средней погрешности ε в оценке времени распространения и измеренной скорости с звука, ηTheory - теоретические значения η, вычисленные с использованием приведенного выше выражения (8), ηMeas - фактические значения η, рассчитанные с использованием приведенного выше выражения (1), и i - индекс пары хорд (например, для расходомера с четырьмя хордами, пары хорд, эти индексы таковы: ВА, BD, СА и CD).
Когда фактическая конфигурация сбоев цикла соответствует возможной конфигурации сбоев цикла из таблицы, в идеальном случае значение функции погрешностей равно нулю. На практике акустический шум, электрические помехи и другие негативные эффекты и недостатки аппаратуры могут вызывать отклонение измеренного значения η от нуля, которое все же будет малым при отсутствии сбоев цикла, и, аналогично, функция погрешностей может принимать малое значение, если фактическая конфигурация сбоев цикла соответствует возможной конфигурации сбоев цикла. С другой стороны, если фактическая конфигурация сбоев цикла отлична от возможной конфигурация сбоев цикла, то функция погрешностей принимает относительно большие ненулевые значения (по сравнению со значением в случае соответствия конфигураций). Итак, для каждой из возможных конфигураций сбоев цикла рассчитывается значение функции погрешностей. Пусть рассчитаны значения функции погрешностей для всех возможных конфигураций сбоев цикла. Так как только одна из возможных конфигураций сбоев цикла (включая случай отсутствия сбоев) будет соответствовать фактической конфигурации сбоев цикла, фактическую конфигурацию сбоев цикла можно идентифицировать, находя минимальное значение функции погрешностей. Иначе говоря, фактическая конфигурация сбоев цикла может быть идентифицирована без необходимости сравнения значений функции погрешностей с пороговыми значениями, которые могут оказаться ошибочными; вместо этого требуется лишь найти минимальное значение функции погрешностей и соответствующую возможную конфигурацию сбоев цикла и, таким образом, определить фактическую конфигурация сбоев.
Перед обсуждением возможного использования данных о фактической конфигурации сбоев цикла сделаем несколько замечаний. Во-первых, возможная конфигурация сбоев цикла может быть установлена при создании ультразвукового расходомера и помещена в таблицу данных, хранимую в памяти расходомера. Это означает, что требуется небольшое процедурное дополнение, связанное с возможными конфигурациями сбоев цикла; фактически такое дополнение может только копировать таблицу из ПЗУ в ЗУПД. Аналогично, теоретические значения η зависят от длин хорд и частоты акустических сигналов, используемых в расходомере; эти величины определяются при создании расходомера. Таким образом, теоретические значения η могут быть рассчитаны заранее и помещены в таблицу данных, хранимую в памяти ультразвукового расходомера. Это означает, что требуется небольшое процедурное дополнение, связанное с теоретической функцией η; фактически такое процедурное дополнение может только копировать теоретические значения η из ПЗУ в ЗУПД для их использования. Даже если в некотором конкретном ультразвуковом расходомере теоретические значения η рассчитаны с помощью более точного выражения (например, выражения (6), которое основано на скорости звука в текучей среде, проходящей через расходомер), теоретические значения η могут быть рассчитаны один единственный раз в некоторый момент, - возможно, при перезагрузке системы, - и помещены в таблицу, что и будет небольшим процедурным дополнением по отношению к операциям фактического измерения. Для расходомера с четырьмя хордами вычисление функции погрешностей включает вычисление только четырех фактических значений η и суммирование четырех вычисленных фактических значения η с теоретическими значениями η, которые или определяются заранее, или рассчитываются процессором только один раз.
Во-вторых, хотя возможно вычислить функцию погрешностей для каждого набора измерений времени распространения (то есть, одного измерения времени распространения против потока и одного измерения времени распространения по потоку для каждой из хорд), в соответствии с другими вариантами осуществления измерения значений времени распространения против потока и по потоку для каждой хорды усредняются по периоду измерений. Например, за период измерений длительностью 1 с, взятый в качестве примера, ультразвуковой расходомер может послать через преобразователи каждой пары 30 акустических сигналов в направлении против потока и 30 сигналов - в направлении по потоку, и значения времени распространения в направлениях против потока и по потоку для каждой хорды будут представлять собой среднее время распространения для 30 акустических сигналов. В таких вариантах функция погрешностей может вычисляться исходя из усредненных значений времени распространения для направлений против потока и по потоку. Таким образом, вычисление функции погрешностей может быть выполнено ультразвуковым расходомером один раз за период измерений. Обратимся теперь к использованию данных о фактической конфигурации сбоев цикла.
Использование данных о фактической конфигурации сбоев цикла может быть многообразным. В определенных случаях, если фактическая конфигурация сбоев цикла отлична от полного отсутствия сбоев, пользователь уведомляется о наличии сбоев цикла (например, с помощью аудиоинформации, видеоинформации или электронной индикации). В других вариантах, если установлено, что возникла определенная конфигурация сбоев цикла (как и выше, отличная от полного отсутствия сбоев), то процессор 202, выполняя программу, корректирует значения времени распространения, искаженные сбоями цикла, и, аналогично, корректирует измеренные значения скорости звука и расхода, на них основанные. Кроме того, сбои цикла в определенных случаях оказываются в значительной мере повторяющимися, и следовательно, для конкретной хорды сбой цикла может происходить в течение длительного времени. В таких случаях ультразвуковой расходомер, определяя фактическую конфигурацию сбоев цикла только в одном периоде измерений, все же может корректировать значения времени распространения в следующем далее периоде измерений. Фактически погрешность в накопленных данных вычислений расхода потока (например, за несколько дней), вызванная сбоями цикла в одном периоде измерений (например, за одну секунду), может оказаться малой, и таким образом, процессор 202, выполняя программу, может отменить корректировку погрешностей в оценке времени распространения в начальный период измерений, отдавая предпочтение корректировке погрешностей только в более поздние периоды измерений.
Далее, при выборе особенности полученного сигнала как маркирующей особенности процессор 202 может использовать различные параметры определения момента поступления с тем, чтобы лучше сфокусировать поиск в полученном сигнале. Например, процессор 202 может использовать настройку усиления полученного сигнала (возможно, в приемнике 212), уточнение зоны нечувствительности вокруг нулевого значения полученного сигнала и периодов отмены (блокирования) вычислений. После определения фактической конфигурации сбоев цикла (которая, как и выше, отлична от полного отсутствия сбоев), процессор 202 может изменить параметры определения момента поступления сигнала, пытаясь устранить сбои цикла в периоды измерений, относящиеся к будущему. Как и выше, погрешность в накопленных данных вычислений расхода (например, за несколько дней), вызванная сбоями цикла в одном периоде измерений (например, за одну секунду), может оказаться малой, и поэтому процессор 202 может отменить корректировку погрешностей в оценке времени распространения в начальный период измерений и предпочесть корректировку параметров для определения времени поступления. В дополнительных вариантах процессор 202 может корректировать время распространения при сбоях цикла, а также корректировать параметры определения времени поступления сигнала.
В обсуждении, проведенном выше в данном описании, предполагалось, что определение конфигурации сбоев цикла производится в самом ультразвуковом расходомере. Однако в альтернативных вариантах осуществления определение конфигурации сбоев цикла может выполняться в устройствах более высокого уровня. На фиг.6 показаны альтернативные варианты, в которых определение фактической конфигурации сбоев цикла выполняется устройствами более высокого уровня. В частности, на фиг.6 показан вычислитель 400 расхода, связанный с группой ультразвуковых расходомеров 402. Вычислитель расхода устроен так, что может накапливать данные (то есть, постоянно осуществлять вычисление текущих итоговых данных) о потоке текущей среды, измеренные каждым из ультразвуковых расходомеров в течение заранее определенного промежутка времени. Каждый из ультразвуковых расходомеров 402 может быть устроен и может функционировать, в основном, так, как описано выше. Однако расходомеры могут иметь различные размеры (то есть, их измерительные муфты могут иметь центральные каналы различных диаметров), или же расходомеры могут проводить измерения для текущих сред различных видов. Например, расходомер для природного газа, применяемый на электростанции, может иметь группу параллельных и независимо работающих измерительных муфт, и каждая муфта может быть оптимизирована для конкретного диапазона величин расхода природного газа. Вычислитель 400 расхода может, следовательно, суммировать данные о потоках текущей среды, поступающие от всех ультразвуковых расходомеров 402, чтобы определить полный расход природного газа на электростанции.
Выбранный в качестве иллюстрации вычислитель 400 расхода включает процессор 404, соединенный с ЗУПД 406, ПЗУ 408, коммуникационным портом 410 и коммуникационным портом 412. Процессор 404 является устройством, выполняющим программы, выполняющие задачи накопления данных об объеме потока, а также определяющие и, возможно, корректирующие конфигурации сбоев цикла. ПЗУ 408 - постоянная память для хранения программ операционной системы, а также программ, реализующих различные варианты. ЗУПД 406 - это ОЗУ процессора 404, и определенные программы и/или структуры данных могут быть скопированы из ПЗУ 408 в ЗУПД 404 перед выполнением программ. В альтернативных вариантах некоторые программы и структуры данных могут быть доступны непосредственно из ПЗУ 408. Коммуникационный порт 410 является устройством, связывающим вычислитель 400 расхода с системами более высокого уровня, например системой сбора данных. Аналогично, коммуникационный порт 412 - устройство, связывающее вычислитель 400 расхода с ультразвуковыми расходомерами 402. В альтернативных вариантах вычислитель расхода может иметь отдельные коммуникационные порты 412 для каждого из ультразвуковых расходомеров 402, а в дополнительных вариантах один коммуникационный порт может служить как для связи с ультразвуковыми расходомерами, так и с устройствами более высокого уровня. Хотя процессор 404, ЗУПД 406, ПЗУ 408 и коммуникационные порты 410, 412 показаны как отдельные устройства, в альтернативных вариантах могут применяться микроконтроллеры, в которых интегрированы процессорное ядро, ЗУПД, ПЗУ и коммуникационные порты.
В соответствии с этими вариантами, по меньшей мере один из ультразвуковых расходомеров 402 выполнен так, что может посылать измеренные для хорд этого расходомера значения времени распространения сигнала вычислителю 400 расхода. В определенных случаях измеренные значения времени распространения, передаваемые вычислителю 400 расхода, представляют собой лишь значения времени распространения в направлении против потока и по потоку для каждой из хорд, а в других случаях измеренные значения времени распространения, передаваемые вычислителю 400 расхода, являются средними значениями времени распространения за определенный период измерений. Соответственно, вычислитель расхода 400, и в частности, процессор 404 и коммуникационный порт 412, выполнены так, что они могут принимать измеренные значения времени распространения сигнала. В соответствии с иллюстрирующими вариантами, вычислитель 400 расхода выполнен так, что он может определять конфигурации сбоев цикла способом, описанным выше применительно к ультразвуковому расходомеру. Таким образом, если вычислительные возможности ультразвукового расходомера недостаточны для выполнения вычислений, нужных для определения конфигурации сбоев цикла, то вычисления могут быть выполнены вычислителем расхода, с которым связан ультразвуковой расходомер.
Действия, выполняемые в зависимости от результатов определения фактической конфигурации сбоев цикла (отличной от случая полного отсутствия сбоев) подобны действиям, выполняемым ультразвуковым расходомером. В определенных случаях процессор 404 вычислителя 400 расхода, располагая копиями результатов измерений времени распространения, корректирует результаты измерений на основе данных о конфигурации сбоев цикла. В других вариантах процессор 404 корректирует результаты измерений времени распространения в течение следующих далее периодов измерений на основе данных о фактических конфигурациях сбоев цикла. Кроме того, вычислитель 400 расхода может информировать ультразвуковой расходомер 402 о фактической конфигурации сбоев цикла и дать ультразвуковому расходомеру команду скорректировать значения времени распространения (в текущем периоде измерений или следующих далее периодах измерений) на основе данных о конфигурации сбоев цикла. И, далее, вычислитель 400 расхода может управлять изменением параметров ультразвукового расходомер 402, связанных с определением момента поступления сигнала, возможно, сочетая эти действия с любыми из указанных выше действий.
На фиг.7 показан алгоритм данного способа, соответствующий по меньшей мере некоторым вариантам. В частности, алгоритм начинает работу (блок 500) и переходит к передаче и приему акустических сигналов, распространяющихся через текучую среду, протекающую через расходомер (блок 504). В соответствии по меньшей мере с некоторыми вариантами, передача и прием выполняются соответствующими парами группы преобразователей. Затем алгоритм переходит к измерению времени распространения акустических сигналов (блок 508). В вариантах, использующих пары преобразователей, измерение осуществляется при обмене сигналами между преобразователями пар. Затем алгоритм переходит к вычислению набора значений погрешности (блок 512), в котором каждое значение погрешности характерно для определенной конфигурации сбоев цикла. В соответствии по меньшей мере с некоторыми вариантами осуществления, вычисление значений погрешности предусматривает вычисление теоретических значений η, как обсуждалось выше, и вычисление значений погрешности с использованием определенного выражения, например, выражения (9), приведенного выше. Затем алгоритм переходит к определению конфигурации сбоев цикла на основе набора значений погрешностей (блок 516), после чего завершает работу (блок 520).
По приведенному здесь описанию специалисты в данной области смогут легко разработать программное обеспечение, предназначенное, как описано, для использования совместно с подходящими аппаратными средствами общего или специального назначения, создавая компьютерную систему и/или ее компоненты в соответствии с различными вариантами, а также смогут создавать компьютерные системы и/или их компоненты для реализации способов, соответствующих различным вариантам, и/или создавать машиночитаемые носители с хранимыми на них программами, реализующими варианты алгоритмов данного способа, соответствующие различным аспектам изобретения.
Приведенное выше обсуждение, как предполагается, лишь иллюстрирует принципы и различные варианты данного изобретения. Многочисленные вариации и модификации станут очевидными для специалистов в данной области, если данное раскрытие будет полностью понято. Например, по физическим причинам может оказаться, что определенные конфигурации сбоев цикла более вероятны, чем другие, и следовательно, список возможных конфигураций сбоев цикла, хранимый в таблице, не обязан включить все возможности, но может включать лишь подмножество, состоящее из наиболее вероятных конфигураций сбоев цикла. Кроме того, выражение (9) обладает тем свойством, что его правая часть принимает малые значения, когда фактическая и возможная конфигурации сбоев цикла соответствуют друг другу, но возможны эквивалентные выражения, правые части которых будут принимать большие значения, когда фактическая и возможная конфигурации сбоев цикла соответствуют друг другу (например, 1/Е(ε, с)), и для таких случаев также можно эквивалентным образом реализовать поиск максимального значения функции погрешностей. Предполагается, что следующая далее формула изобретения будет интерпретироваться как охватывающая все такие вариации и модификации.



Данная группа изобретений относится к определению конфигурации сбоев цикла сигнала в акустическом расходомере. Технический результат заключается в повышении точности определения конфигурации сбоев цикла сигнала в акустическом расходомере. Он достигается тем, что предложены изобретения, в которых определяют конфигурацию сбоев цикла при передаче и приеме сигналов в акустическом расходомере, причем передача осуществляется между соответствующими друг другу преобразователями группы пар преобразователей, измеряют время распространения акустических сигналов между соответствующими преобразователями группы пар преобразователей, вычисляют набор значений функции погрешностей (каждое значение функции погрешностей является характерным для конкретной конфигурации сбоев цикла при измерении времени распространения акустических сигналов) и определяют конфигурацию сбоев цикла с использованием, по меньшей мере частичным, набора значений погрешностей. 4 н. и 19 з.п. ф-лы, 7 ил., 2 табл.
1. Система определения конфигурации сбоев цикла сигнала, включающая расходомер, корпус расходомера, определяющий центральный канал и связанный с трубопроводом, по которому протекает текучая среда, по меньшей мере четыре пары преобразователей, связанных с корпусом расходомера и установленных с возможностью передачи акустических сигналов через центральный канал, процессор, механически связанный с корпусом расходомера и электрически связанный по меньшей мере с четырьмя парами преобразователей, и блок памяти, электрически связанный с процессором и хранящий программу, выполняемую процессором, причем процессор выполнен с возможностью измерения времени распространения акустических сигналов через центральный канал в течение первого периода измерений и определения конфигурации сбоев цикла при измерении времени распространения сигнала между по меньшей мере четырьмя парами преобразователей в течение первого периода измерений, при выполнении указанной программы.
2. Система по п.1, в которой процессор выполнен с возможностью вычисления набора значений, характерных для определенной конфигурации сбоев цикла при обмене сигналами между по меньшей мере четырьмя парами преобразователей, и оценки набора значений для определения конфигурации сбоев цикла, при выполнении указанной программы.
3. Система по п.2, в которой процессор выполнен с возможностью выбора по меньшей мере одного значения из группы, включающей максимум и минимум из набора значений, при оценке указанного набора значений и выполнении программы.
4. Система по п.1, в которой процессор выполнен с возможностью изменения параметров определения момента поступления сигнала по меньшей мере одной пары преобразователей в зависимости от конфигурации сбоев циклов, при сбое цикла по меньшей мере одной пары преобразователей, при выполнении программы.
5. Система по п.4, в которой программа выполнена с возможностью отмены корректировки времени распространения в зависимости от конфигурации сбоев цикла.
6. Система по п.1, в которой процессор выполнен с возможностью дополнительной корректировки значения времени распространения для первого периода измерений, в зависимости от конфигурации сбоев цикла, при выполнении программы.
7. Система по п.1, в которой процессор выполнен с возможностью корректировки значения времени распространения для второго периода измерений, в зависимости от конфигурации сбоев цикла, при выполнении программы.
8. Система по п.7, в которой процессор выполнен с возможностью корректировки значения времени распространения для второго периода измерений, следующего за первым периодом измерений, при выполнении программы.
9. Система определения конфигурации сбоев цикла сигнала включающая расходомер, снабженный группой пар преобразователей, процессор, блок памяти, связанный с процессором и хранящий программу, выполняемую процессором, коммуникационный порт, связанный с процессором, причем процессор выполнен с возможностью приема измеренных значений расхода текучей среды от расходомера посредством коммуникационного порта, и постоянного накопления текущих итоговых данных о потоке текучей среды через расходомер в течение определенного промежутка времени, приема от расходомера измеренных значений времени распространения акустических сигналов между группой пар преобразователей расходомера и определения конфигурации сбоев цикла при измерениях времени распространения сигналов, при выполнении указанной программы.
10. Система по п.9, в которой программа выполнена с возможностью изменения параметров определения расходомером времени поступления сигнала по меньшей мере одной пары преобразователей в зависимости от конфигурации сбоев цикла.
11. Система по п.10, в которой программа выполнена с возможностью отмены корректировки результатов измеренного времени распространения.
12. Система по п.9, в которой программа выполнена с возможностью корректировки значения измеренного времени распространения в зависимости от конфигурации сбоев цикла.
13. Система по п.9, в которой программа выполнена с возможностью корректировки значения измеренного времени распространения для второго периода измерений, следующего за первым периодом измерений, учитывающей конфигурацию сбоев цикла в первом периоде измерений.
14. Система по п.9, в которой программа выполнена с возможностью определения конфигурации сбоев цикла, вычисления набора значений, характерных для определенной конфигурации сбоев цикла и оценки набора значений для определения конфигурации сбоев цикла.
15. Способ определения конфигурации сбоев цикла сигнала в расходомере, включающий передачу акустических сигналов через текучую среду, протекающую через расходомер, снабженный группой пар преобразователей, и между соответствующими преобразователями группы пар преобразователей, измерение времени распространения акустических сигналов между соответствующими преобразователями группы пар преобразователей, вычисление набора значений погрешностей, в котором каждое значение погрешности характерно для конфигурации сбоев цикла при измерении времени распространения акустических сигналов, и определение конфигурации сбоев цикла при котором по меньшей мере частично используют набор значений погрешностей.
16. Способ по п.15, который дополнительно включает изменение параметров определения момента поступления сигнала в зависимости от определенной конфигурации сбоев цикла.
17. Способ по п.16, который дополнительно включает отмену корректировки измерения времени распространения.
18. Способ по п.15, который дополнительно включает корректировку измеренного времени распространения акустических сигналов в зависимости от конфигурации сбоев цикла.
19. Способ по п.15, который дополнительно включает корректировку измеренного времени распространения акустических сигналов для второго периода измерений времени распространения в зависимости от конфигурации сбоев цикла в первом периоде измерений времени распространения, предшествующем второму периоду измерений.
20. Машиночитаемый носитель информации, на котором хранится программа, для процессора, выполненного с возможностью вычисления набора значений, каждое из которых характерно для конфигурации сбоев цикла при измерении времени распространения звукового сигнала через текучую среду в расходомере, определения конфигурации сбоев цикла с по меньшей мере частичным учетом указанного набора значений, при выполнении программы.
21. Носитель по п.20, в котором процессор выполнен с возможностью изменения параметров определения момента поступления сигнала для по меньшей мере одной пары преобразователей, в зависимости от конфигурации сбоев цикла, при выполнении указанной программы.
22. Носитель по п.20, в котором процессор выполнен с возможностью корректировки значения времени распространения в зависимости от конфигурации сбоев цикла, при выполнении указанной программы.
23. Носитель по п.20, в котором процессор выполнен с возможностью корректировки значения времени распространения в последующем периоде измерений, в зависимости от конфигурации сбоев цикла в предшествующем периоде измерений, при выполнении указанной программы.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 6062091 A, 16.05.2000 | |||
| US 5650571 A, 22.07.1997 | |||
| УЛЬТРАЗВУКОВОЙ СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ПОТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2027149C1 |

