Область техники, к которой относится изобретение
Настоящее изобретение относится к расходомерам и способам управления измерительными подсистемами расходомера.
Уровень техники
После извлечения углеводородов (например, сырой нефти, природного газа) из подземных пластов текучие среды транспортируются по трубопроводам. Желательно иметь возможность точного измерения количества транспортируемой (переправляемой) текучей среды, особенно важна точность изменений при передаче текучей среды в собственность другого владельца ("поставка потребителю текучей среды"). Ультразвуковые расходомеры могут применяться для измерения потока текучей среды, протекающей через трубопровод, обеспечивая достаточную точность, необходимую при поставке потребителю.
Стоимость газа, переходящего в собственность другого владельца в пункте передачи, для газопроводов большой пропускной способности может составлять более миллиона долларов в день. Поэтому в некоторых пунктах передачи текучей среды два независимых ультразвуковых расходомера размещают в одном корпусе. Использование двух расходомеров позволяет уменьшить погрешности измерений в случаях, когда один из расходомеров работает неправильно или отказывает, а если в пункте передачи работают оба расходомера, то точность измерений расхода текучей среды может быть проверена путем сравнения данных от двух независимых расходомеров. Однако наличие двух независимых ультразвуковых расходомеров в одном корпусе может создавать определенные трудности при измерении и/или обслуживании расходомеров.
Раскрытие изобретения
Настоящее изобретение описывает расходомер, включающий муфту, определяющую центральный канал расходомера, первую и вторую группы пар преобразователей, установленных на муфте, первую управляющую электронную схему, электрически связанную с первой группой пар преобразователей и выполненную с возможностью выборочного привода каждой пары преобразователей первой группы пар преобразователей, и вторую управляющую электронную схему, другую в сравнении с первой схемой, электрически связанную со второй группой пар преобразователей и выполненную с возможностью выборочного привода каждой пары преобразователей второй группы пар преобразователей, при этом первая и вторая управляющие электронные схемы связаны между собой и выполнены с возможностью согласования привода соответствующих пар преобразователей.
Первая управляющая электронная схема может содержать первую плату сбора данных, выполненную с возможностью управления приводом первой группы пар преобразователей, а вторая управляющая электронная схема может содержать вторую плату сбора данных, выполненную с возможностью управления приводом второй группы пар преобразователей, при этом первая и вторая платы сбора данных могут быть связаны друг с другом посредством сигнальной шины, первая плата сбора данных может быть выполнена с возможностью подачи синхросигнала второй плате сбора данных в момент времени, близкий к моменту активизации пары преобразователей, а вторая плата сбора данных может быть выполнена с возможностью привода пары преобразователей посредством указанного синхросигнала.
Первая плата сбора данных может быть выполнена с возможностью подачи синхросигнала при распространении акустического сигнала между парой преобразователей первой группы пар преобразователей, а вторая плата сбора данных может быть выполнена с возможностью возбуждения акустического сигнала от преобразователя второй группы пар преобразователей при получении синхросигнала.
Синхросигнал может указывать преобразователь из группы преобразователей второй платы сбора данных для возбуждения акустического сигнала.
Первая плата сбора данных может быть выполнена с возможностью подачи синхросигнала одновременно с возбуждением акустического сигнала от преобразователя первой группы пар преобразователей, а вторая плата сбора данных может быть выполнена с возможностью возбуждения акустического сигнала от преобразователя второй группы преобразователей через заданное время после получения синхросигнала.
Первая управляющая электронная схема дополнительно может включать первую плату-процессор, содержащую первый процессор, связанный с первой платой сбора данных и выполненный с возможностью приема представлений полученных акустических сигналов от первой платы сбора данных, а вторая управляющая электронная схема дополнительно может включать вторую плату-процессор, содержащую второй процессор, связанный со второй платой сбора данных и выполненный с возможностью приема представлений полученных акустических сигналов от второй платы сбора данных.
Расходомер дополнительно может включать процессор, связанный с первой и второй платами сбора данных и выполненный с возможностью приема соответствующих представлений полученных акустических сигналов от первой и второй плат сбора данных.
Расходомер также может включать первый и второй счетчики, а первая управляющая электронная схема может содержать первый счетчик, первую плату сбора данных, выполненную с возможностью управления приводом первой группы пар преобразователей, и привода каждой пары преобразователей первой группы пар преобразователей в интервалы времени, определенные посредством значения первого счетчика, вторая управляющая электронная схема может содержать второй счетчик, вторую плату сбора данных, выполненную с возможностью управления приводом второй группы пар преобразователей, и привода каждой пары преобразователей второй группы преобразователей в интервалы времени, определенные посредством значения второго счетчика, причем первая плата сбора данных может быть выполнена с возможностью периодической подачи синхросигнала второй плате сбора данных, а вторая плата сбора данных может быть выполнена с возможностью регулировки второго счетчика по первому счетчику посредством синхросигнала.
Вторая управляющая схема может быть выполнена с возможностью по меньшей мере установки определенного значения второго счетчика и/или установки значения, указанного синхросигналом.
Первая управляющая электронная схема может включать первую плату-процессор, содержащую первый процессор, и первую плату сбора данных, связанную с первым процессором, выполненную с возможностью управления приводом первой группы пар преобразователей и привода каждой пары преобразователей первой группы преобразователей в интервалы времени, определенные посредством значения первого счетчика, а вторая управляющая электронная схема может включать вторую плату-процессор, содержащую второй процессор, и вторую плату сбора данных, связанную со вторым процессором, выполненную с возможностью управления приводом второй группы пар преобразователей и привода каждой пары преобразователей второй группы пар преобразователей в интервалы времени, определенные посредством значения второго счетчика, при этом первый процессор может быть выполнен с возможностью периодической подачи синхросигнала второму процессору, а вторая плата сбора данных может быть выполнена с возможностью установки второго счетчика по первому счетчику посредством синхросигнала.
Вторая плата сбора данных может быть выполнена с возможностью по меньшей мере установки определенного значения второго счетчика и/или установки значения, указанного синхросигналом.
Первый процессор может быть выполнен с возможностью подачи второму процессору синхросигнала, представляющего собой пакетное сообщение.
Также настоящее изобретение описывает способ управления работой измерительных подсистем расходомера, включающий управление первой измерительной подсистемой расходомера, содержащей первую группу пар преобразователей, установленных на муфте расходомера, управление второй измерительной подсистемой расходомера, содержащей вторую группу пар преобразователей, установленных на муфте расходомера, и управление приводом преобразователей первой и второй измерительных подсистем расходомера.
При управлении приводом преобразователей дополнительно может осуществляться обмен сигналами между первой управляющей электронной схемой, связанной с первой измерительной подсистемой, и второй управляющей электронной схемой, другой в сравнении с первой управляющей электронной схемой и связанной со второй измерительной подсистемой.
При управлении приводом преобразователей дополнительно может осуществляться подача одного логического значения от первой измерительной подсистемы ко второй измерительной подсистеме одновременно с каждым возбуждением пары преобразователей и возбуждение пары преобразователей посредством второй измерительной подсистемы в соответствии с получением указанного логического значения.
Осуществление привода преобразователей может осуществляться посредством второй измерительной подсистемы при получении указанного логического значения.
Осуществление привода преобразователей может быть с задержкой при получении указанного логического значения.
Управление приводом преобразователей дополнительно может включать подачу значения, указывающего пару преобразователей для привода, от первой измерительной подсистемы ко второй измерительной подсистеме одновременно с каждым приводом пары преобразователей, и активизацию второй измерительной подсистемой пары преобразователей, выбранных на основе полученного значения.
При управлении первой измерительной подсистемой дополнительно может осуществляться привод каждой пары преобразователей первой измерительной подсистемы в интервалы времени, определенные посредством отсчета времени, осуществляемого первой измерительной подсистемой, при управлении второй измерительной подсистемой дополнительно может осуществляться привод каждой пары преобразователей второй измерительной подсистемы в интервалы времени, определенные посредством отсчета времени, осуществляемого второй измерительной подсистемой, причем управление приводом преобразователей дополнительно может включать подачу синхросигнала от первой измерительной подсистемы ко второй измерительной подсистеме, и синхронизацию отсчета времени второй измерительной подсистемой по отсчету времени, осуществляемому первой измерительной подсистемой, посредством синхросигнала.
Краткое описание чертежей
Далее при подробном описании вариантов осуществления, иллюстрирующих настоящее изобретение, используются ссылки на следующие сопровождающие фигуры:
На фиг.1 представлен общий вид расходомера, соответствующего по меньшей мере части вариантов осуществления;
На фиг.2 представлен вид сверху с местным разрезом расходомера, соответствующего по меньшей мере части вариантов осуществления;
На фиг.3 представлен вид с торца в разрезе расходомера, соответствующего в отношении первой измерительной подсистемы по меньшей мере части вариантов осуществления;
На фиг.4 представлен вид сверху расходомера, соответствующего в отношении первой измерительной подсистемы по меньшей мере части вариантов осуществления;
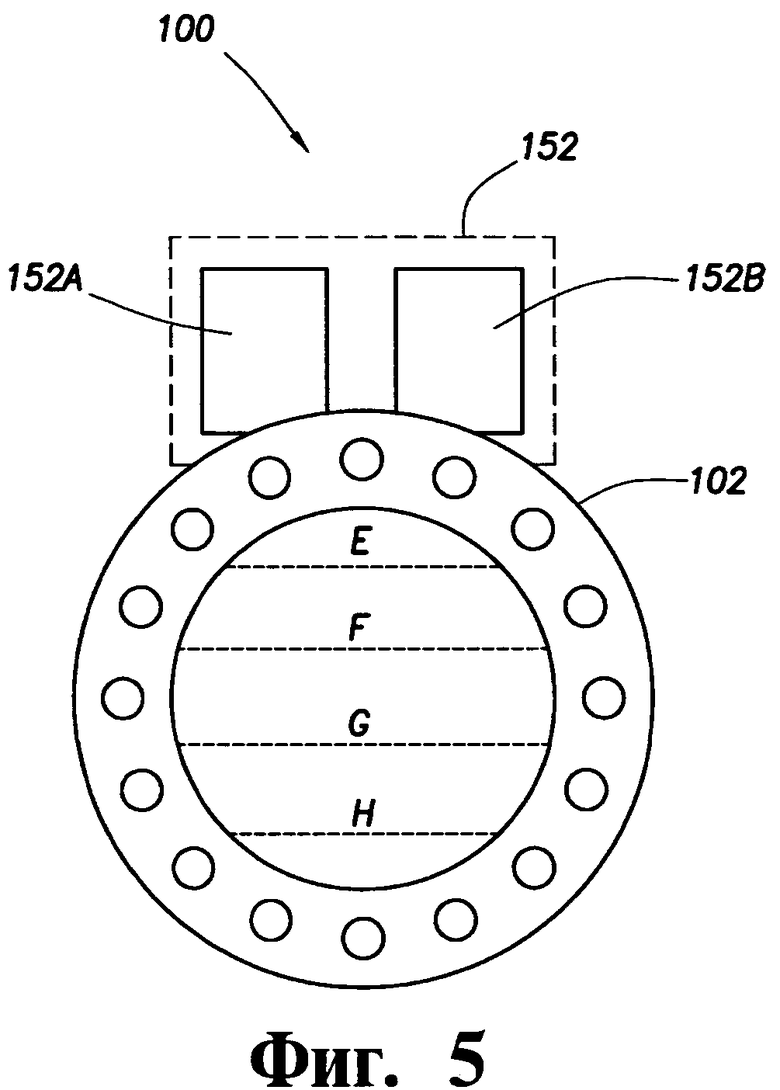
На фиг.5 представлен вид с торца в разрезе расходомера, соответствующего в отношении второй измерительной подсистемы по меньшей мере части вариантов осуществления;
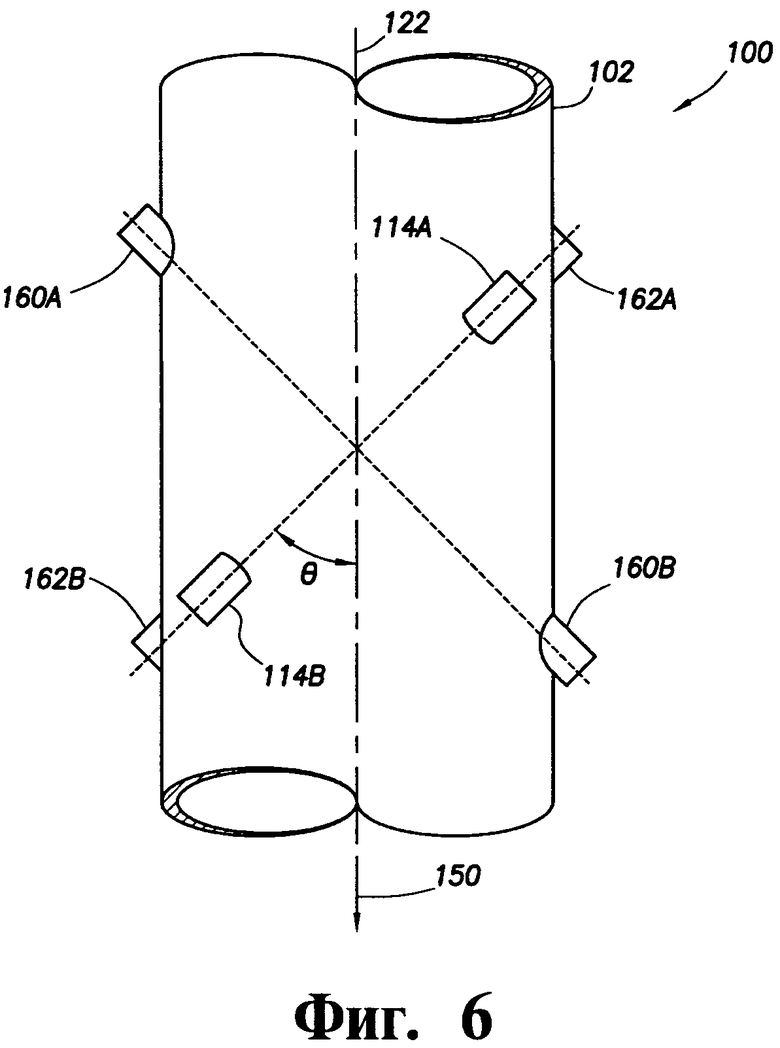
На фиг.6 представлен вид сверху расходомера, соответствующего в отношении второй измерительной подсистемы по крайней мере некоторым вариантам осуществления;
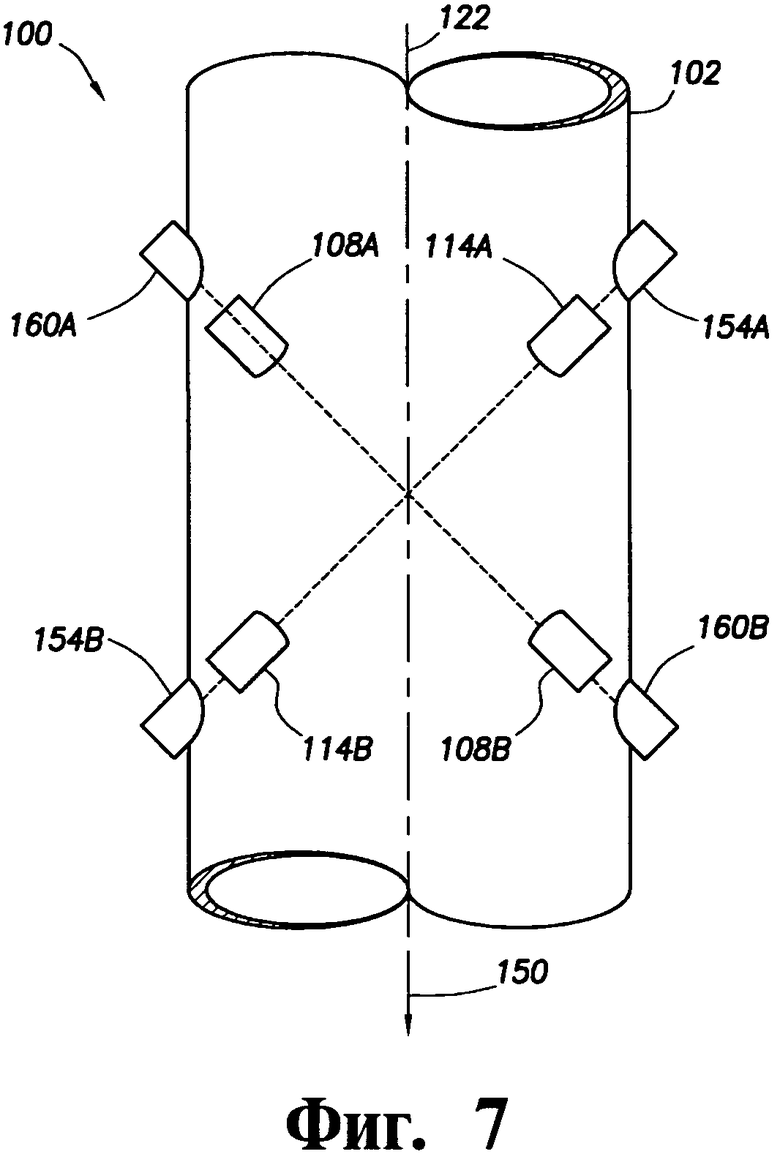
На фиг.7 представлен вид сверху расходомера, соответствующего по меньшей мере части вариантов осуществления;
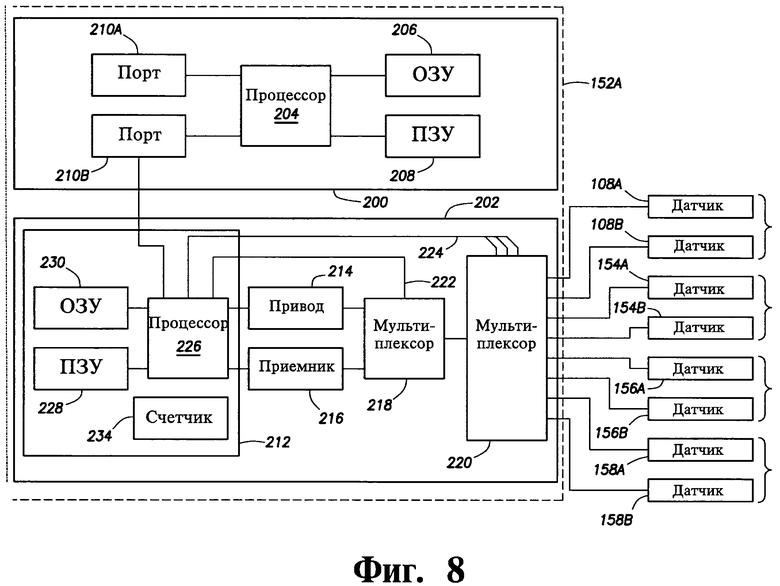
На фиг.8 представлена управляющая электронная схема, соответствующая по меньшей мере части вариантов осуществления;
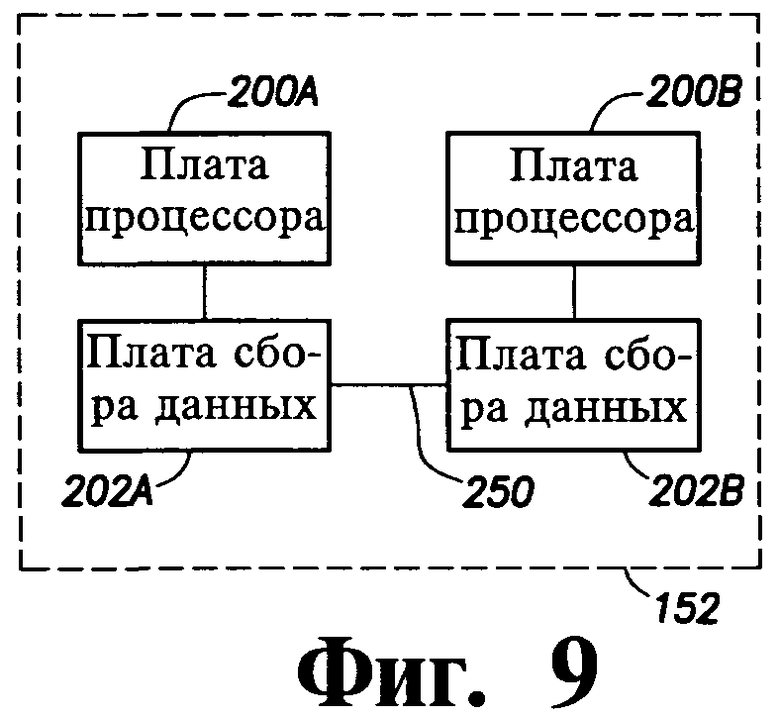
На фиг.9 представлена управляющая электронная схема, соответствующая по меньшей мере части вариантов осуществления;
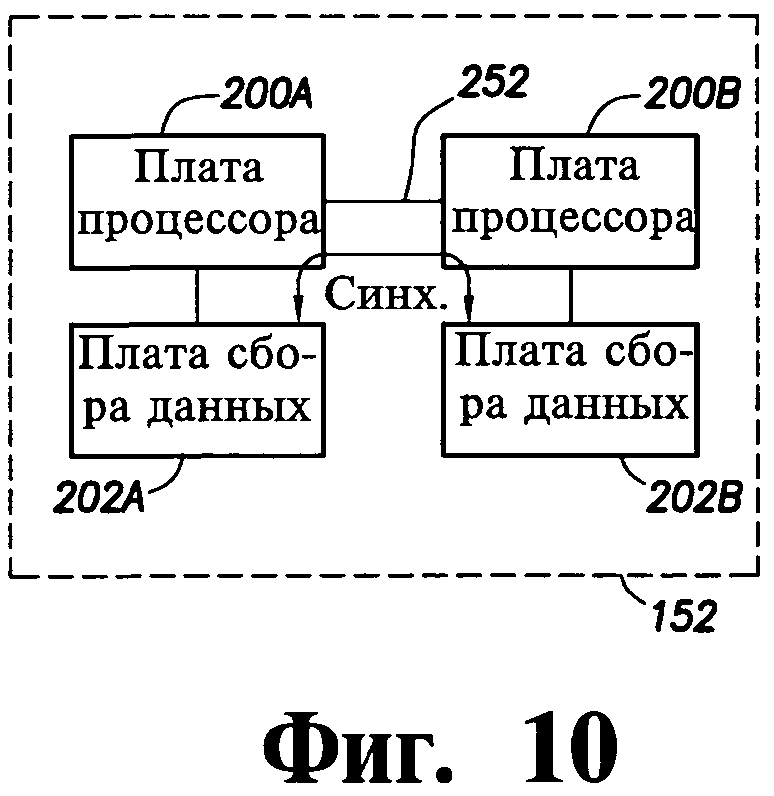
На фиг.10 представлены управляющие схемы, соответствующие по меньшей мере части вариантов осуществления;
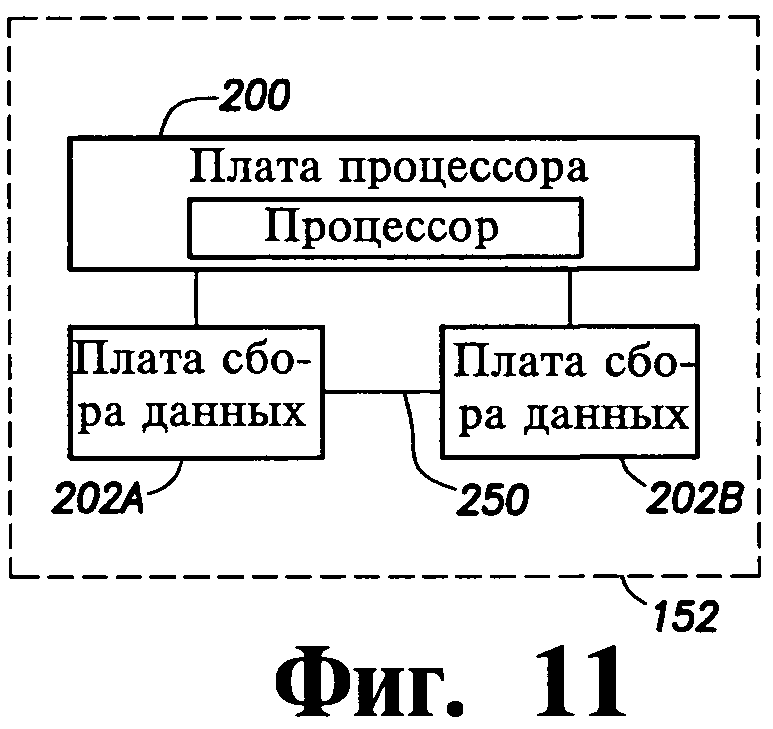
На фиг.11 представлены управляющие схемы, соответствующие по меньшей мере части вариантов осуществления;
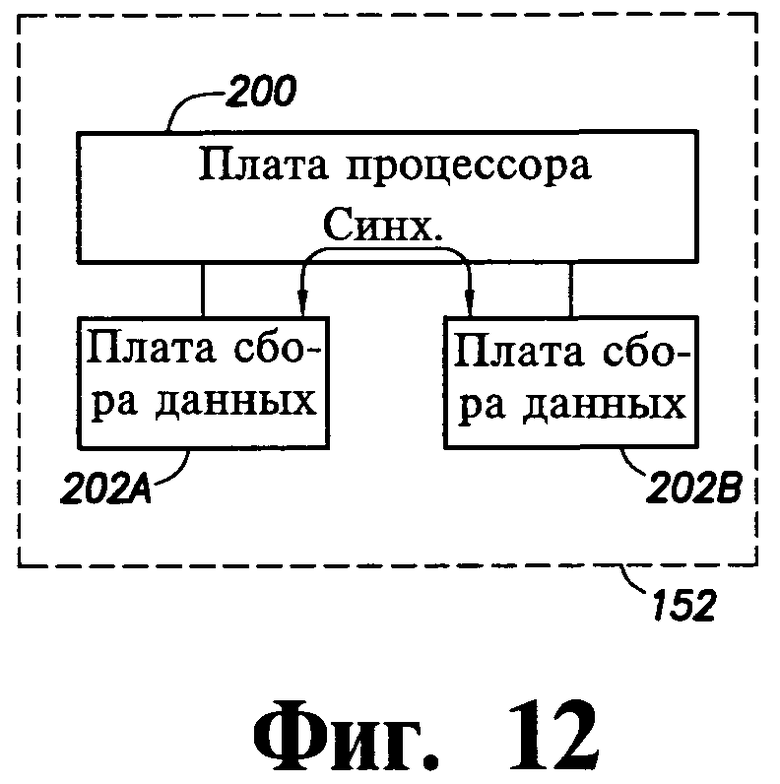
На фиг.12 представлены управляющие схемы, соответствующие по меньшей мере части вариантов осуществления;
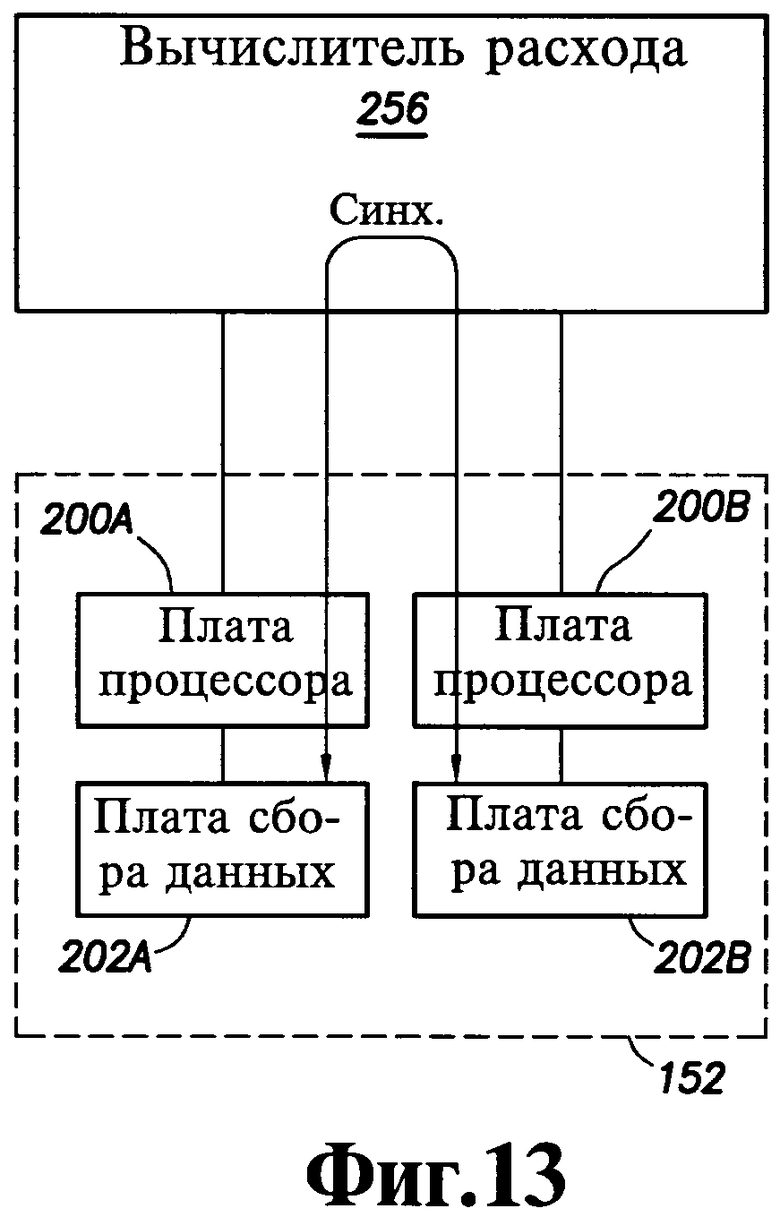
На фиг.13 представлена управляющая электронная схема, связанная с вычислительным устройством для вычисления расхода текучей среды (далее называемым "вычислитель расхода"), в соответствии по меньшей мере с частью вариантов осуществления;
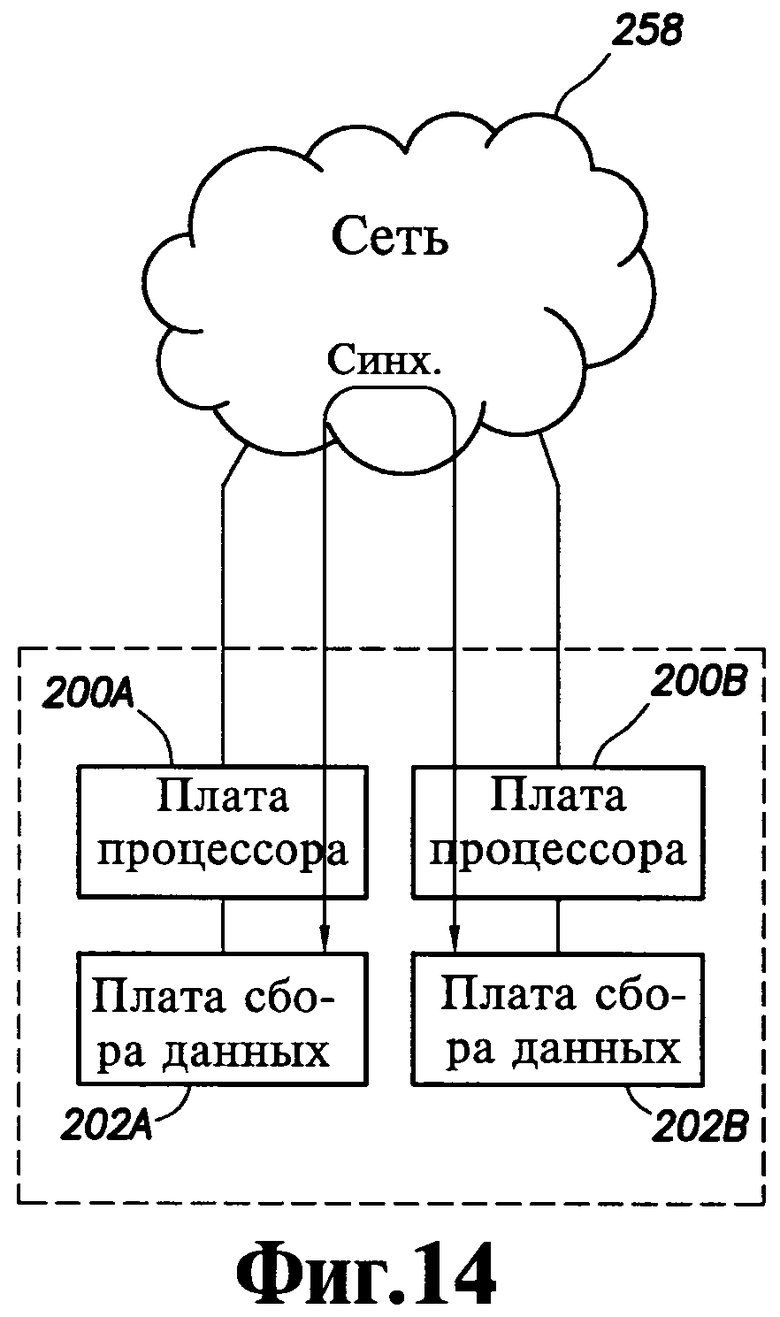
На фиг.14 представлена управляющая электронная схема, связанная с компьютерной сетью, в соответствии по меньшей мере с частью вариантов осуществления изобретения;
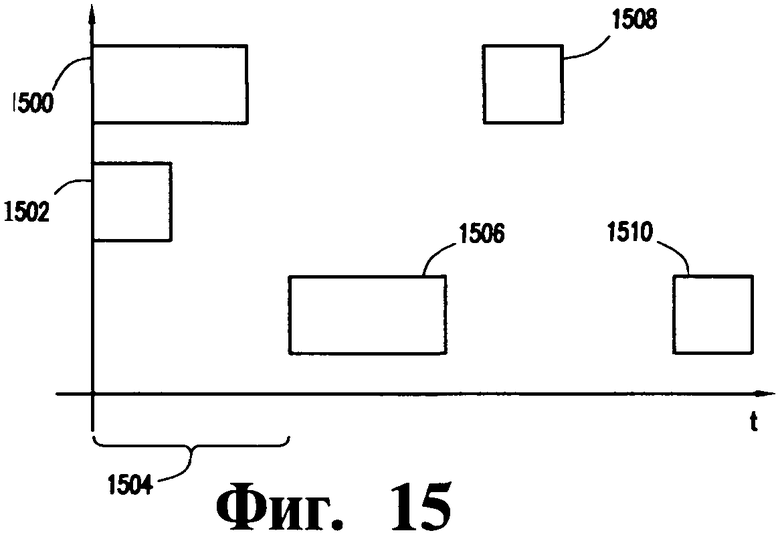
На фиг.15 показана временная диаграмма, в соответствии по меньшей мере с частью вариантов осуществления;
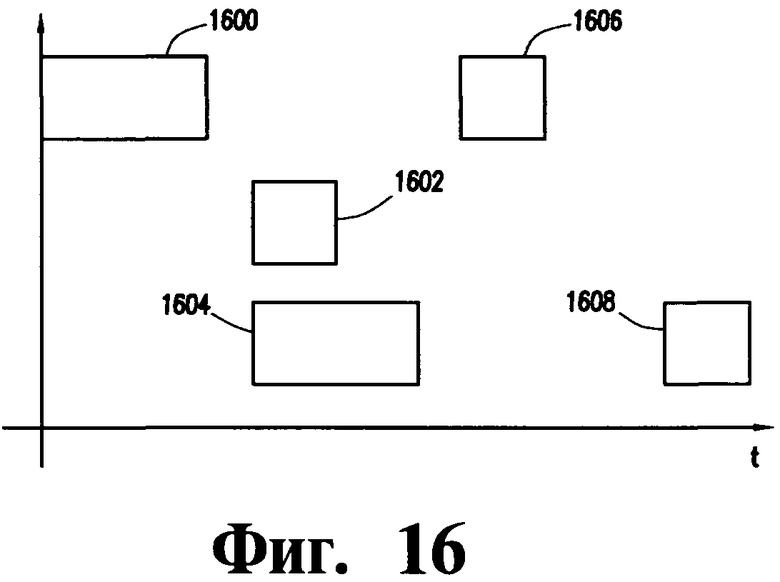
На фиг.16 показана временная диаграмма, в соответствии по меньшей мере с частью вариантов осуществления;
На фиг.17 представлена временная диаграмма, в соответствии по меньшей мере с частью вариантов осуществления; и
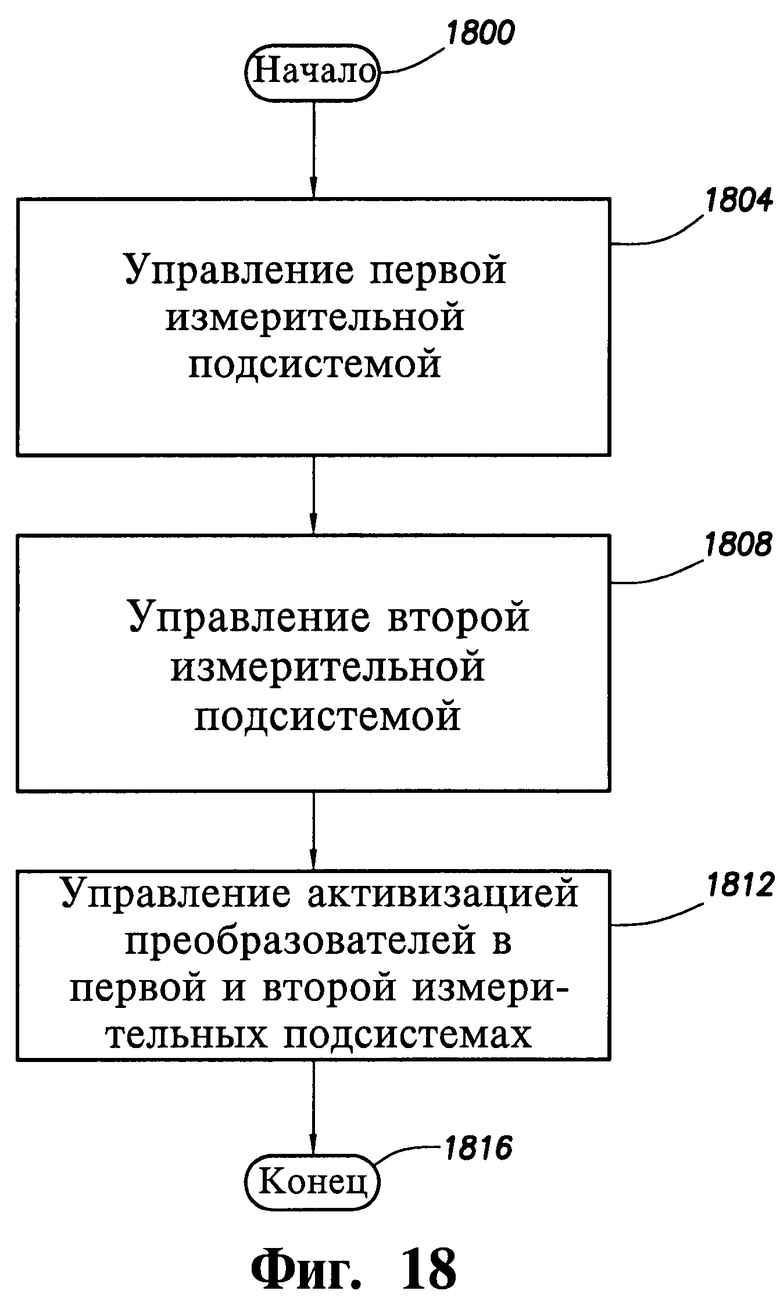
На фиг.18 представлен способ, соответствующий по меньшей мере части вариантов осуществления.
Осуществление изобретения
Некоторые термины используются всюду далее в описании и формуле изобретения для обозначения конкретных компонент системы. Как известно специалистам в данной области техники, различные компании, производящие расходомеры, могут ссылаться на одинаковые компоненты, используя различные термины. В данном документе компоненты, отличающиеся по наименованию, но не по функциям, различаться не будут.
В следующем далее обсуждении и в формуле изобретения термины "включает" и "содержит" используются не в ограничительном смысле и поэтому должны пониматься как означающие: "включает (но перечень не является ограничительным)". Кроме того, термины "соединение" и "связь" означают как непосредственные, так и опосредованные соединение или связь. Так, если указано, что первое устройство соединено со вторым, то соединение может быть как непосредственным, так и опосредованным, через другие устройства и соединения.
Термин "измерительная муфта" и/или "корпус расходомера" относится к детали, изготовленной из одной литой заготовки. Муфта и/или корпус расходомера, состоящие из отдельных литых деталей, соединенных вместе (например, с помощью фланцевого соединения или сварки), не будут в описании и формуле изобретения называться "муфтой" или "корпусом расходомера".
Термин "активизация" (возбуждение) применительно к паре пьезоэлектрических преобразователей может означать одно из двух событий (или даже возможно оба): подачу (возбуждение) акустического сигнала первым преобразователем из пары преобразователей и получение (прием) акустического сигнала вторым преобразователем из указанной пары преобразователей.
Следующее далее обсуждение относится к различным вариантам осуществления изобретения. Хотя предпочтительными могут быть один вариант или группа вариантов осуществления, раскрытые варианты не должны интерпретироваться или иным образом использоваться как ограничивающие область, охватываемую раскрытием изобретения, включая формулу изобретения. Кроме того, специалистам в данной области должно быть понятно, что следующее далее описание имеет широкую область применения и что любой обсуждаемый вариант осуществления настоящего изобретения рассматривается лишь как пример и не указывает, что область, охватываемая изобретением, включая формулу изобретения, ограничена этим вариантом осуществления.
Различные варианты осуществления настоящего изобретения разработаны для измерения расхода углеводородов (например, сырой нефти, природного газа), и описание исходит из контекста таких разработок. Но описанные системы и способы применимы также для измерения расхода других текучих сред (например, сжиженных при низких температурах газов или воды).
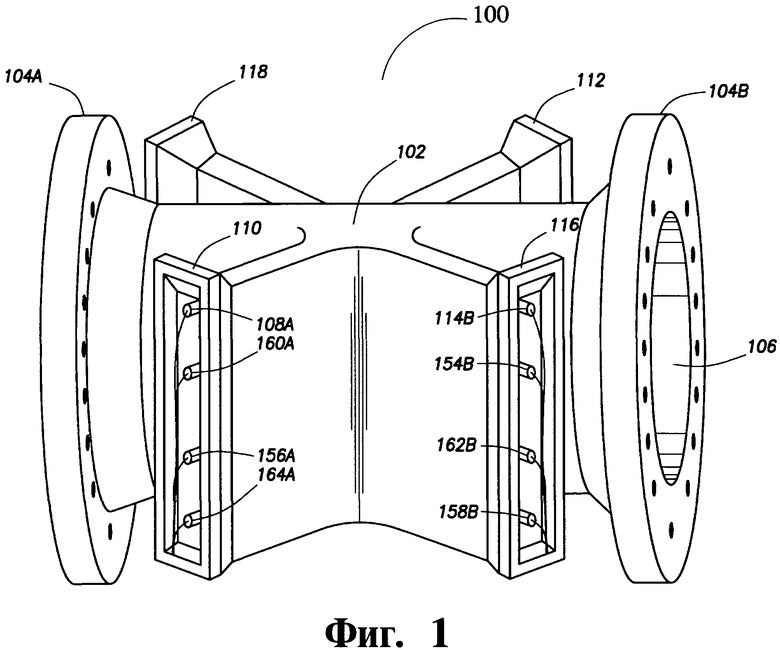
На фиг.1 представлен общий вид расходомера 100, включающего достаточное число пар преобразователей, с помощью которых могут выполняться избыточные измерения расхода. В частности, корпус расходомера, или муфта 102 имеет форму, позволяющую поместить ее между секциями трубопровода, например, присоединяя муфту 102 к секциям с помощью фланцев 104. Муфта имеет заранее известные размеры и определяет центральный канал 106, через который проходит измеряемый поток текучей среды. Расходомер 100 включает также группу пар преобразователей. На общем виде расходомера (фиг.1) показан только один преобразователь для каждой из восьми пар преобразователей, взятых для иллюстрации. В частности, преобразователь 108, находящийся в выступе 110 корпуса, является парным для преобразователя (не показан на чертеже) в выступе 112 корпуса. Аналогичным образом, другие преобразователи, находящиеся в выступе 110 корпуса, имеют парные им преобразователи (не показаны) в выступе 112 корпуса. Аналогично, преобразователь 114, находящийся в выступе 116 корпуса, является парным преобразователю (не показан) в выступе 118 корпуса. Аналогично, другие преобразователи, находящиеся в выступе 116 корпуса, являются парными преобразователям (не показаны) в выступе 118 корпуса.
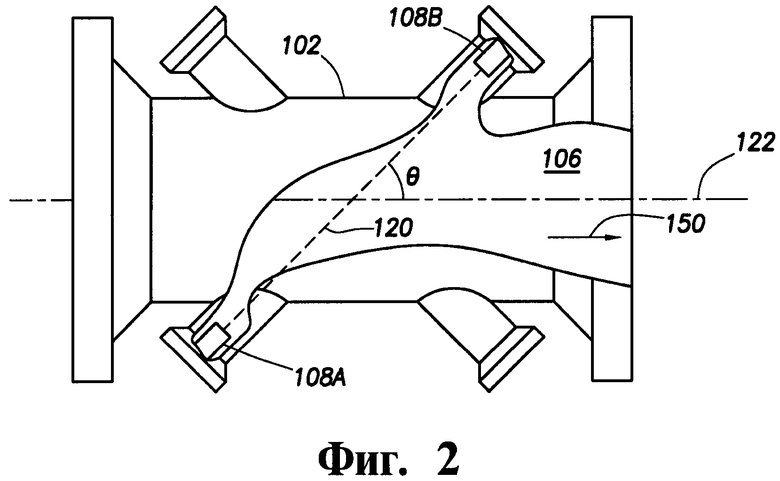
На фиг.2 представлена в виде сверху с местным разрезом система, показанная на фиг.1. В частности, на фиг.2 показано, что взятая для примера пара преобразователей 108А и 108В разнесена по длине муфты 102. Преобразователи 108А и 108В являются акустическими приемопередатчиками, или, более конкретно, ультразвуковыми приемопередатчиками, то есть могут как посылать, так и принимать акустические сигналы с частотами, превосходящими приблизительно 20 кГц. Акустическая энергия генерируется и воспринимается пьезоэлементом, который имеется в каждом из указанных преобразователей. Для генерации акустического сигнала на пьезоэлемент подается синусоидальный электрический сигнал, возбуждающий колебания пьезоэлемента, который генерирует сигнал, распространяющийся в центральном канале 106 через текучую среду, расход которой измеряется, и достигающий парного ему преобразователя указанной пары преобразователей. Симметрично описанному способу, в принимающем пьезоэлектрическом элементе, на который воздействует акустическая энергия (то есть, энергия акустического сигнала и шумов), возбуждаются колебания и генерируется электрический сигнал, который воспринимается, преобразуется в цифровую форму и анализируется электронными схемами, связанными с расходомером.
Отрезок 120 между рассмотренными в качестве примера преобразователями 108А и 108В, называемый также хордой, направлен под определенным углом θ к оси 122. Длина хорды 120 равна расстоянию между передней поверхностью преобразователя 108А и передней поверхностью преобразователя 108В. Текучая среда (например такая, как сырая нефть, природный газ, сжиженный природный газ) протекает в направлении стрелки 150. Сначала расположенный ниже по потоку текучей среды (далее - "нижний") преобразователь 108В генерирует акустический сигнал, распространяющийся по протекающей через муфту 102 текучей среде к расположенному выше по потоку (далее - "верхнему") преобразователю 108А и достигающий его. Через определенное время (например, несколько миллисекунд) верхний преобразователь 108А генерирует ответный акустический сигнал, распространяющийся в обратном направлении к нижнему преобразователю 108В и достигающий его. Таким образом, обмен ультразвуковыми сигналами между взятыми для иллюстрации преобразователями 108А и 108В вдоль хорды 120 можно сравнить, например, с подачей бейсбольного мяча и его захватом ловушкой. При работе расходомера описанная последовательность событий может повторяться тысячи раз в минуту.
Время распространения ультразвукового сигнала между преобразователями 108А и 108В зависит, в частности, от направления распространения акустического сигнала, то есть, направления "по потоку" или "против потока". Время распространения акустического сигнала по потоку (то есть, в направлении потока текучей среды, показанном стрелкой 150) меньше, чем время распространения против потока (в направлении, противоположном показанному стрелкой 150). Значения времени распространения сигнала по потоку и против потока могут использоваться для определения средней скорости текучей среды в определенной области, окружающей данную хорду, а также для определения скорости звука в текучей среде, поток которой измеряется.
В соответствии с различными вариантами осуществления, расходомер 100 выполняет два отдельных и независимых измерения расхода текучей среды с помощью преобразователей, находящихся в одной муфте. В частности, четыре из взятых для иллюстрации восьми пар преобразователей связаны с первой измерительной подсистемой, а остальные четыре из восьми пар преобразователей - со второй измерительной подсистемой. В других вариантах осуществления каждая из измерительных подсистем может включать большее или меньшее число пар преобразователей, и число пар преобразователей в измерительных подсистемах не обязательно одинаково. Независимо от числа пар преобразователей, применяемых в каждой из измерительных подсистем, при одновременной работе обеих измерительных подсистем возможно сравнивать результаты измерений расхода и, следовательно, верифицировать измерения расхода текучей среды, проходящей через расходомер. В случаях, когда одна измерительная подсистема не действует (например, происходит отказ пары преобразователей), для измерения расхода все еще может использоваться вторая измерительная подсистема.
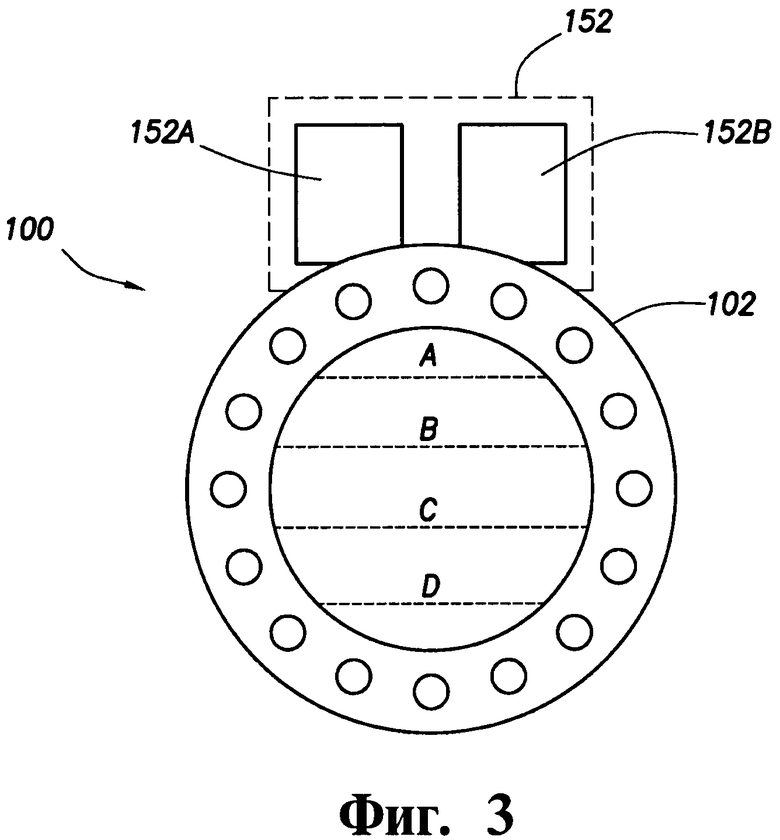
На фиг.3 показан вид с торца в разрезе расходомера, показывающий первую измерительную подсистему. Первая измерительная подсистема, показанная на фиг.3, имеет четыре хорды А, В, С и D, находящиеся на разных уровнях внутри муфты 102. В частности, хорда А является верхней хордой, хорда В - верхней из средних хорд хорда С - нижней из средних хорд, и хорда D - нижней хордой. Термины "верхняя", "нижняя" и их варианты относятся к положению относительно направления силы тяжести. Каждая из хорд А-D соответствует паре преобразователей, работающих поочередно в качестве передатчика и в качестве приемника. На фиг.3 также показаны электронные схемы 152 расходомера, принимающие и обрабатывающие данные от четырех хорд А-D, взятых в качестве иллюстрации (и, возможно, другие данные). Не показаны на фиг.3 (скрыты фланцем) четыре пары преобразователей, соответствующих хордам А-D. На фиг.3 показано только расположение по высоте четырех хорд первой измерительной подсистемы, взятых для иллюстрации, и не отражает, являются ли эти хорды параллельными или скрещивающимися.
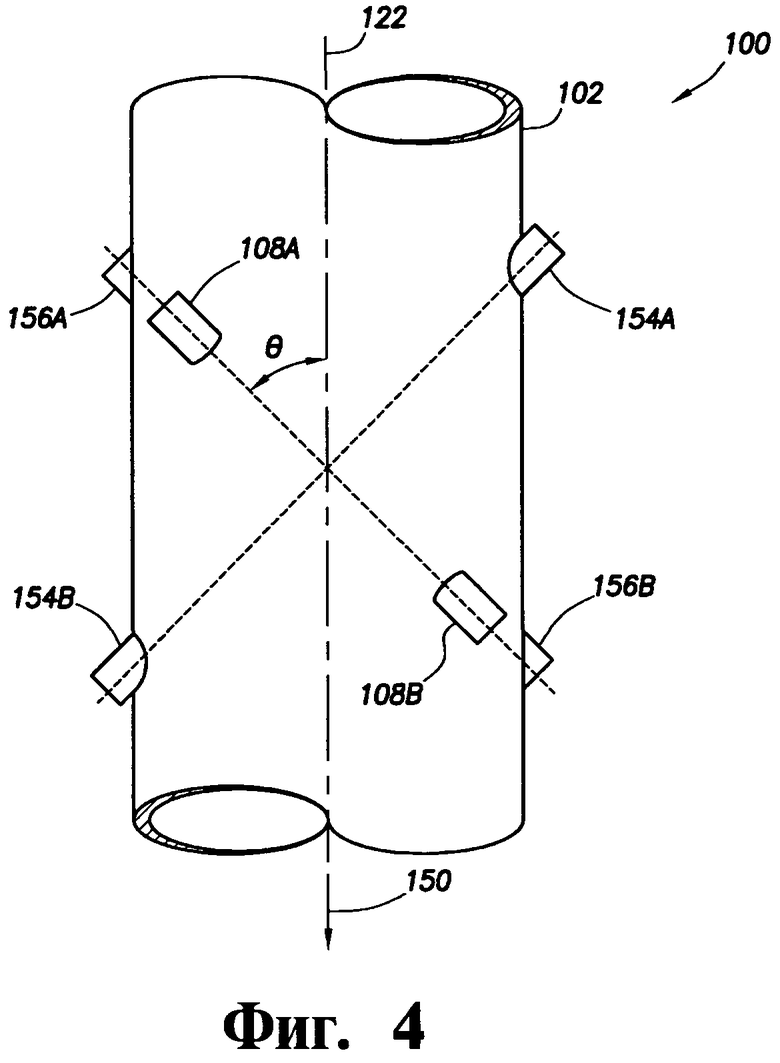
На фиг.4 представлен вид сверху расходомера 100 (выступы 110, 112, 116 и 118 корпуса не показаны), иллюстрирующий взаимное расположение хорд первой измерительной подсистемы, в соответствии по меньшей мере с группой вариантов осуществления. В частности, первая пара преобразователей 108А и 108В (которая соответствует верхней хорде А) определяет хорду, проходящую под определенным углом θ, не являющимся прямым углом, к оси 122 муфты 102. Другая пара преобразователей 154А и 154В (которая соответствует верхней из средних хорд, хорде В) определяет хорду, которая вместе с хордой, проходящей между преобразователями 108А и 108В, образует, в общих чертах, Х-образную конфигурацию, в определенных вариантах осуществления хорда между преобразователями 154А и 154В перпендикулярна хорде между преобразователями 108А и 108В. Аналогично, третья пара преобразователей 156А и 156В (которая соответствует нижней из средних хорд, хорде С) определяет хорду, параллельную хорде между преобразователями 108А и 108В, но находящуюся в центральном канале ниже, чем хорда между преобразователями 108А и 108В и хорда между преобразователями 154А и 154В. Не показана на фиг.4 явно, в связи с кривизной, муфты 102, взятой в качестве примера, четвертая пара преобразователей 158 (преобразователь 158В показан на фиг.1), соответствующая нижней хорде D и определяющая хорду, параллельную хорде между преобразователями 154А и 154В.
Рассматривая совместно фиг.3 и 4 применительно к первой измерительной подсистеме, взятой в качестве иллюстрации, можно видеть, что пары преобразователей расположены таким образом, что две верхние пары преобразователей, соответствующие хордам А и В, образуют Х-образную конфигурацию, и две нижние пары преобразователей, соответствующие хордам С и D, также образуют Х-образную конфигурацию. Хорды А и В не лежат в одной плоскости, хорды С и D также не лежат в одной плоскости, хорды А и С параллельны, и хорды В и D также параллельны. Возможны другие конфигурации хорд, например, все хорды измерительной подсистемы могут лежать в одной вертикальной плоскости. Первая измерительная подсистема определяет значения скорости газа, или хордальные скорости, для каждой из областей, окружающих хорды А-D, и хордальные скорости используются совместно для определения средней скорости всего потока, проходящего через центральный канал. По значению средней скорости потока и известной площади поперечного сечения центрального канала первая измерительная подсистема может определить количество газа, прошедшего через муфту, и, следовательно, через трубопровод.
Рассмотрим теперь вторую измерительную подсистему. На фиг.5 показан вид с торца в разрезе расходомера 100, относящийся ко второй измерительной подсистеме. Измерительная подсистема на фиг.5 имеет четыре хорды Е, F, G и Н, находящиеся на разных уровнях внутри муфты 102. Более конкретно, хорда Е является верхней хордой, хорда F - верхней из средних хорд, хорда G - нижней из средних хорд и хорда Н - нижней хордой. Каждая из хорд Е-Н соответствует паре преобразователей, работающих поочередно в качестве передатчика и приемника. На фиг.5 также показаны электронные схемы 152 расходомера, которые принимают и обрабатывают данные, относящиеся к четырем хордам Е-Н, взятым в качестве примера (и возможно, другие данные). На фиг.5 не показаны скрытые фланцем четыре пары преобразователей, соответствующие хордам Е-Н. В соответствии по крайней мере с определенными вариантами осуществления, хорды Е-Н находятся на тех же уровнях, что и указанные хорды А-D соответственно, но в других вариантах осуществления некоторые из хорд Е-Н или все эти хорды могут быть расположены на уровнях, отличных от уровней, на которых находятся хорды А-D. Кроме того, на фиг.5 показаны уровни, на которых расположены четыре взятых в качестве примера хорды второй измерительной подсистемы, но не показано, являются ли хорды параллельными или скрещивающимися.
На фиг.6 представлен вид сверху расходомера 100 (выступы 110, 112, 116 и 118 корпуса не показаны), иллюстрирующий другой вариант осуществления изобретения взаимного расположения хорд, относящихся ко второй измерительной подсистеме, иллюстрирующей изобретение. В частности, первая пара преобразователей 114А и 114В (которая соответствует верхней хорде Е) определяет хорду, проходящую под определенным углом θ, не являющимся прямым, к оси 122 муфты 102. Другая пара преобразователей 160А и 160В (которая соответствует верхней из средних хорд, хорде F) определяет хорду, которая вместе с хордой, проходящей между преобразователями 114А и 114В, образует, в общих чертах, Х-образную конфигурацию. Аналогично, третья пара преобразователей 162А и 162В (которая соответствует нижней из средних хорд, хорде G) определяет хорду, параллельную хорде между преобразователями 114А и 114В, но лежащую в центральном канале ниже, чем хорда между преобразователями 114А и 114В и хорда между преобразователями 160А и 160В. Не показана на фиг.6 явно, в связи с кривизной муфты 102, иллюстрирующей изобретение, четвертая пара 164 преобразователей (преобразователь 164А показан на фиг.1), соответствующая нижней хорде Н и определяющая хорду, параллельную хорде между портами преобразователей 160А и 160В.
Рассматривая совместно фиг.5 и 6, относящиеся ко второй измерительной подсистеме, взятой в качестве иллюстрации, можно видеть, что пары преобразователей расположены так, что две верхние пары преобразователей, соответствующие хордам Е и F, образуют Х-образную конфигурацию (расположение), и две нижние пары преобразователей, соответствующие хордам G и Н, также образуют Х-образную конфигурацию. Хорды Е и F не лежат в одной плоскости, хорды G и Н также не лежат в одной плоскости, хорды Е и G параллельны, и хорды F и Н также параллельны. Возможны другие конфигурации хорд, например, при которых все хорды измерительной подсистемы могут лежать в одной вертикальной плоскости. Вторая измерительная подсистема определяет значения скорости потока газа для каждой из областей, окружающих хорды Е-Н для определения хордальных скоростей, и хордальные скорости используются совместно, чтобы определить среднюю скорость всего потока, проходящего через центральный канал. По средней скорости потока и известной площади поперечного сечения центрального канала вторая измерительная подсистема может определить количество газа, прошедшего через муфту и, следовательно, через трубопровод.
На фиг.4 и 6 показаны только преобразователи, связанные с описываемой измерительной подсистемой. На фиг.7 представлен вид сверху расходомера 100 (выступы 110, 112, 116 и 118 корпуса не показаны), иллюстрирующий взаимное положение по меньшей мере группы пар преобразователей первой измерительной подсистемы, в соответствии по меньшей мере с определенными вариантами осуществления. В частности, первая измерительная подсистема включает пару преобразователей 108А и 108В, пару преобразователей 154А и 154В и две другие пары, не показанные на фиг.7. Вторая измерительная подсистема включает пару преобразователей 114А и 114В, пару преобразователей 160А и 160В и две другие пары, не показанные на фиг.7. Таким образом, в вариантах осуществления, показанных на фиг.7, пары преобразователей, соответствующие верхним хордам (хорде А для первой измерительной подсистемы и хорде Е для второй измерительной подсистемы), занимают одинаковое положение относительно оси муфты 102. Аналогично, пары преобразователей, соответствующие верхним из средних хорд (хорде В для первой измерительной подсистемы и хорде F для второй измерительной подсистемы), занимают одинаковое положение относительно муфты 102. Однако возможны и другие конфигурации, например такая, в которой вторая измерительная подсистема сдвинута вдоль оси муфты 102.
Далее описание переходит к электронным схемам расходомера. В соответствии с определенными вариантами осуществления, каждая измерительная подсистема имеет отдельный независимый набор электронных схем. Вернемся ненадолго к фиг.3 и 5, которые иллюстрируют всю электронную схему 152 расходомера и на которых она показана как состоящая из двух отдельных управляющих электронных схем 152А и 152В. Фиг.8 иллюстрирует управляющую электронную схему 152А, связанную с одной измерительной подсистемой, в соответствии по меньшей мере с определенными вариантами осуществления. Следует помнить, однако, что в вариантах осуществления, в которых каждая измерительная подсистема имеет отдельный независимый набор электронных схем, описание, ссылающееся на фиг.8, одинаково применимо к управляющим электронным схемам каждой измерительной подсистемы. Управляющие электронные схемы 152А могут быть расположены внутри корпуса блока электроники, который может соединяться с муфтой 102. Альтернативно, корпус блока электроники, в котором размещается управляющая электронная схема 152А, может быть с тем же результатом установлен вблизи муфты (то есть, на расстоянии нескольких футов [нескольких десятков сантиметров]). Управляющая электронная схема 152А в этих вариантах осуществления включает плату-процессор 200, связанную с платой 202 сбора данных. Плата 202 сбора данных, в свою очередь, связана с преобразователями измерительной подсистемы. Наличие отдельных плат - платы-процессора 200 и платы 202 сбора данных - может быть обосновано тем, что плата 202 сбора данных должна находиться в опасной зоне, которая предъявляет к плате 202 требования искробезопасности (то есть, должна отсутствовать опасность возникновения искр или других выбросов энергии, способных воспламенить огнеопасные газы), а плата-процессор 200 может функционировать вне опасной зоны. В других вариантах функциональные возможности платы-процессора 200 и платы сбора данных могут быть реализованы на одной электронной плате.
На плате-процессоре 200 находится блок 204 обработки данных (процессор), связанный с запоминающим устройством с произвольным доступом, или оперативным запоминающим устройством (RAM или ОЗУ) 206, постоянным запоминающим устройством (ROM или ПЗУ) 208 и группой коммуникационных портов (СОМ) 210А и 210В. Процессор 204 - устройство, выполняющее блок машинных кодов, осуществляющие управление измерением потока текучей среды через центральный канал для определенной измерительной подсистемы. ПЗУ 208 - постоянная память, в которой хранятся машинные коды операционной системы, а также машинные коды, осуществляющие измерения потока текучей среды. ОЗУ 206 является оперативной памятью процессора 204, и определенные машинные коды перед их выполнением, а также, возможно, и/или структуры данных могут быть скопированы из ПЗУ 208 в ОЗУ 206. В альтернативных вариантах осуществления блока машинных кодов и структуры данных могут быть доступны непосредственно из ПЗУ 208. Коммуникационный порт 210А является устройством, посредством которого расходомер связан с другими устройствами, такими как электронные схемы, связанные с другими измерительными подсистемами расходомера, вычислителем расхода (который может накапливать данные измерений объема потока от группы расходомеров) и/или системой сбора данных. Хотя процессор 204, ОЗУ 206, ПЗУ 208 и коммуникационные порты 210 показаны как отдельные устройства, в альтернативных вариантах осуществления могут применяться микроконтроллеры, в которых интегрированы процессорное ядро, ОЗУ, ПЗУ и коммуникационные порты.
Процессор 204 соединен с платой 202 сбора данных и управляет ее функционированием, чтобы посылать и принимать акустические сигналы через текучую среду, расход которого измеряется. В частности, процессор 204 может быть связан с платой сбора данных через коммуникационный порт 210В. Коммуникационный порт 210В может быть отдельным портом, как показано, но плата-процессор 200 может также использовать один порт 210 как для связи с другими устройствами, так и с платой 202 сбора данных. В определенных вариантах осуществления протокол связи между платой-процессором 200 и платой 202 сбора данных является протоколом RS-485, но с тем же результатом могут использоваться и другие протоколы связи. Через порт 210В, показанный для примера, плата-процессор 200 посылает команды плате 202 сбора данных, например, команды, инициирующие последовательную активизацию каждой пары преобразователей измерительной подсистемы.
Плата 202 сбора данных включает конечный автомат 212, соединенный с приводом 214 преобразователя, приемником 216 и двумя мультиплексорами 218 и 220. Конечный автомат 212 также соединен с мультиплексорами 218 и 220 через шины 222 и 224 управления соответственно. В соответствии по меньшей мере с определенными вариантами осуществления конечный автомат 212 является конечным автоматом с группой состояний, активизирующими в заранее заданной последовательности каждую пару преобразователей измерительной подсистемы. Конечный автомат 212 также принимает и представляет в цифровом виде акустические сигналы, воздействующие на каждый преобразователь, и посылает цифровые данные, полученные по акустическим сигналам, плате-процессору 200. В определенных вариантах осуществления конечный автомат 212 реализован в виде блока машинных кодов, выполняемых процессором 226 (например, машинных кодов, хранимых в ПЗУ 228 и загружаемых для выполнения в ОЗУ 230), а в других вариантах конечный автомат 212 является специализированной интегральной микросхемой или программируемой матрицей логических элементов.
В определенных вариантах осуществления привод 214 преобразователя включает цепь генератора сигнала и схему усилителя. В вариантах осуществления, в которых привод 214 преобразователя имеет внутренний генератор, привод 214 преобразователя генерирует исходный сигнал, усиливает сигнал до мощности, достаточной для управления преобразователем, и обеспечивает согласование сопротивлений относительно преобразователей. В других вариантах осуществления привод 214 преобразователя принимает синусоидальный сигнал желательной частоты от конечного автомата 212 или другого источника, усиливает сигнал и обеспечивает согласование сопротивлений относительно преобразователей. Аналогично, приемник 216 также может быть реализован в различных вариантах. В определенных вариантах осуществления приемник 216 может быть подобен аналого-цифровому преобразователю, который, получая сигнал в виде аналогового представления акустического волнового сигнала, принимаемого преобразователем, преобразует сигнал в цифровую форму. В определенных случаях приемник 216 фильтрует и/или усиливает сигналы до или после преобразования в цифровую форму. Цифровая версия (представление) полученного сигнала может тогда передаваться конечному автомату 212, и оцифрованный полученный сигнал передается плате-процессору 200.
Конечный автомат 212 выборочно управляет мультиплексорами 218 и 220, обеспечивая соединение каждого преобразователя каждой пары преобразователей с приводом 214 преобразователя (для управления преобразователем с целью генерации акустического сигнала) и с приемником 216 (для приема электрического сигнала, генерируемого преобразователем при воздействии акустической энергии). В определенных вариантах осуществления конечный автомат 212 на протяжении периода измерений (например, в течение одной секунды) управляет каждой парой преобразователей с возможностью подачи около 30 акустических сигналов, распространяющихся в направлении против потока текучей среды, и 30 акустических сигналов, распространяющихся в направлении по потоку. Для каждой пары преобразователей с тем же результатом может использоваться большее или меньшее число акустических сигналов, распространяющихся в направлениях по потоку и против потока, а также большая или меньшая длительность периодов измерений.
Продолжая ссылаться на фиг.8, сосредоточимся на паре преобразователей 108А и 108В как представителе всех пар преобразователей. Для целей данного обсуждения предположим, что преобразователь 108А работает как передатчик, а преобразователь 108В - приемник, однако при реальном функционировании они могут поочередно меняться ролями. Под управлением конечного автомата 212 привод 214 преобразователя соединяется через мультиплексоры 218 и 220 с преобразователем 108А. Электрический сигнал, генерируемый и/или усиливаемый приводом 214 преобразователя, подается на пьезоэлемент преобразователя 108А и возбуждает его, и преобразователь 108А, в свою очередь, генерирует акустический сигнал. Акустический сигнал проходит через текучую среду, расход которой измеряется, от преобразователя 108А к преобразователю 108В. Для удобства на чертеже преобразователи 108А и 108В не показаны как расположенные на одной оси, но при их функционировании они, в общем, коаксиальны друг другу, как показано на фиг.4. В течение времени распространения акустического сигнала между преобразователем 108А и преобразователем 108В конечный автомат 212 изменяет конфигурацию мультиплексоров 218 и 220 для того, чтобы установить связь между преобразователем 108В и приемником 216. На преобразователь 108В воздействует акустическая энергия (то есть, акустический сигнал и шум), и электрический сигнал, соответствующий воздействующей акустической энергии, передается приемнику 216. Затем роли преобразователей как передатчика и как приемника меняются, и процесс начинается заново для следующей пары преобразователей, например пары преобразователей 154А и 154В.
В определенных вариантах осуществления в конечном автомате 212 реализован также регистр или счетчик 234. Счетчик функционирует в тех вариантах осуществления (обсуждаемых более подробно ниже), в которых активизация пар преобразователей основана на выделении заранее временных окон. Счетчик периодически обновляется (например, каждую миллисекунду), и по его содержимому плата 202 сбора данных активизирует пары преобразователей в течение соответствующих интервалов времени. Хотя счетчик 234 показан как часть конечного автомата 212, в других вариантах осуществления счетчик может быть реализован как регистр на плате сбора данных, который периодически обновляется конечным автоматом 212 или другими средствами. В вариантах осуществления, в которых конечный автомат 212 реализован, например, программно, счетчик 234 может быть частью программного обеспечения или представлять собой регистр процессора 226.
Конечный автомат 212 посылает плате-процессору 200 цифровые данные о полученных акустических сигналах и информацию о том, когда был послан каждый акустический сигнал. В определенных случаях данные о том, когда был активизирован каждый сигнал и цифровые данные пакетируются в одно сообщение. На основе данных, полученных от платы 202 сбора данных, процессор 204 определяет время получения каждого из полученных акустических сигналов (например, момент определенного прохождения через нуль с начала поступления сигнала) и определяет время распространения акустического сигнала. Процесс приема данных и определения времени распространения для каждого акта посылки сигнала повторяется в течение каждого периода измерений (например, в течение одной секунды) не только для посылки сигналов в направлениях по потоку и против потока текучей среды, но и для каждой хорды измерительной подсистемы. Посредством полученных данных процессор 204 рассчитывает скорости потока в зоне каждой хорды, среднюю скорость потока, а также, учитывая площадь поперечного сечения муфты 102, объем текучей среды, проходящей через расходомер за период измерений.
В определенных ситуациях акустические сигналы первой измерительной подсистемы могут интерферировать с акустическими сигналами второй измерительной подсистемы, вызывая искажения в результатах измерений. Например, акустический сигнал, генерируемый первым преобразователем, распространяется не только вдоль хорды через текучую среду, расход которой измеряется, но и в более широкой области, чем близкая к хорде область, подобно тому, как расходится луч света от рефлектора осветительного прибора. В определенных случаях ширина луча и параметры движения текучей среды могут быть такими, что акустические сигналы, генерируемые преобразователем первой измерительной подсистемы, воздействуют на преобразователь второй измерительной подсистемы, что вызывает погрешности при приеме. В качестве другого примера, отметим, что, хотя большая часть акустической энергии, генерируемой преобразователем, распространяется через текучую среду, расход которой измеряется, все же определенная часть акустической энергии, генерируемой преобразователем, передается муфте 102. Скорость распространения акустических сигналов в металлической конструкции муфты 102 в большинстве случаев существенно выше, чем скорость распространения сигнала через текучую среду, расход которой измеряется, и, следовательно, образуется паразитный акустический сигнал, распространяющийся через муфту 102, инициированный преобразователем первой измерительной подсистемы, и этот паразитный сигнал может быть получен преобразователем второй измерительной подсистемы, вызывая погрешности при приеме.
Чтобы уменьшить или устранить интерференцию между измерительными подсистемами, расходомеры, в соответствии с различными вариантами осуществления, могут координировать активизацию пар преобразователей. Такая координация может принимать различные формы, отличающиеся уровнем сложности. Обсуждение координации работы измерительных подсистем начнем с приводимых в качестве примеров систем для обмена синхросигналами и затем обратимся к вариантам осуществления, иллюстрирующим процесс синхронизации.
На фиг.9 показана управляющая электронная схема 152, соответствующая по меньшей мере части вариантов осуществления. В частности, управляющая электронная схема 152 включает плату-процессор 200А и плату 202А сбора данных первой измерительной подсистемы, а также плату-процессор 200В и плату 202В сбора данных второй измерительной подсистемы. В вариантах осуществления, соответствующих фиг.9, сигнальная шина 250 связывает платы 202 сбора данных и через сигнальную шину 250 осуществляется обмен синхросигналами между платами 202 сбора данных. На фиг.10 также показан вариант осуществления, в котором измерительная подсистема также включает плату-процессор 200 и плату 202 сбора данных, но на фиг.10 обмен синхросигналами между измерительными подсистемами происходит через шину 252 передачи сигналов, соединяющую плату-процессор 200А первой измерительной подсистемы и плату-процессор 200В второй измерительной подсистемы.
На фиг.11 показан вариант осуществления управляющей электронной схемы 152, в котором первая измерительная подсистема включает плату 202А сбора данных, и вторая измерительная подсистема включает плату 202В сбора данных, но управляющая электронная схема 152 содержит только одну плату-процессор 200, которая связана с обеими платами сбора данных и управляет их работой. Тем не менее в вариантах осуществления, показанных на фиг.11, сигнальная шина 250 связывает платы 202 сбора данных, и по сигнальной шине 250 происходит обмен синхросигналами между платами 202 сбора данных. На фиг.12 также показан вариант осуществления, в котором каждая измерительная подсистема имеет отдельную плату 202 сбора данных, но управляющая электронная схема 152 включает одну плату-процессор 200, соединенную с каждой из плат 202 сбора данных. Однако в вариантах осуществления, показанных на фиг.12, обмен синхросигналами происходит между платами 202 сбора данных через плату-процессор 200, и поэтому нет отдельной сигнальной шины между платами 202 сбора данных.
На фиг.13 показан вариант осуществления, в котором каждая измерительная подсистема имеет собственную плату-процессор 200 и собственную плату 202 сбора данных, однако, в вариантах осуществления, показанных на фиг.13, синхросигналы, которыми обмениваются платы сбора данных, идут через другое устройство. Как показано на фиг.13, синхросигнал проходит через вычислитель расхода 256, соединенный с платами-процессорами 200 обеих измерительных подсистем, но синхросигнал может проходить через любое занимающее более высокое положение в иерархии устройство, например систему диспетчеризации и сбора данных (SCADA). На фиг.14 также показан вариант осуществления, в котором каждая измерительная подсистема включает плату-процессор 200 и плату 202 сбора данных, но на фиг.14 платы-процессоры 200 соединены через сеть 258 (например, Ethernet и/или аналогичную ей), и синхросигналы, которыми обмениваются платы сбора данных, проходят через платы-процессоры 200 и сеть 258.
Далее описаны примеры, иллюстрирующие синхронизацию между измерительными подсистемами. Подобно тому, что существует много физически различных вариантов осуществления обмена синхросигналами, координация времени активизации пар преобразователей между измерительными подсистемами не может быть реализована в различных вариантах осуществления. Для целей настоящего рассмотрения предполагается, что в системе координации выделяется ведущая измерительная подсистема, и каждая подсистема осуществляет посылку сигналов в заранее определенные интервалы времени (с координацией по опорному генератору). Сначала рассмотрено управление ведущей измерительной подсистемой.
В определенных вариантах осуществления одна из измерительных подсистем назначается ведущей, а другая считается ведомой. Назначение ведущей измерительной подсистемы может быть сделано заранее, или же измерительные подсистемы могут выбрать ведущую подсистему, например, с помощью генерации случайных чисел или на основе серийных номеров измерительных подсистем. Независимо от точного механизма назначения ведущей измерительной подсистемы, она будет передавать синхросигнал ведомой измерительной подсистеме одновременно с каждой активизацией пары преобразователей ведущей измерительной подсистемы. Ведомая измерительная подсистема принимает синхросигнал и активизирует пару преобразователей ведомой измерительной подсистемы в ответ на полученный синхросигнал. В определенных вариантах осуществления благодаря координации между измерительными подсистемами только одна пара преобразователей расходомера 100 активизируется в любой момент времени. В других вариантах осуществления в результате координации только один преобразователь может посылать акустический сигнал в любой момент, но посылка акустического сигнала может производиться во время, когда другой акустический сигнал распространяется от передатчика к приемнику. В дополнительном варианте осуществления координация может допускать одновременность посылки сигналов, но только преобразователями, находящимися на разных уровнях, благодаря чему интерференция не создает существенных проблем.
На фиг.15 показана временная диаграмма, соответствующая по меньшей мере определенным вариантам осуществления изобретения, в которых имеются ведущая и ведомая схемы. В частности, ведущая измерительная подсистема активизирует пару преобразователей (в этом случае подсистема посылает акустический сигнал с помощью одного из преобразователей), что показано на чертеже как интервал 1500. Одновременно с активизацией первая измерительная подсистема посылает синхросигнал, что показано как интервал 1502. Подача синхросигнала может быть осуществлена любым из способов, описанных выше. Вторая измерительная подсистема получает синхросигнал и активизирует пару преобразователей (в этом случае она посылает акустический сигнал) в течение заранее определенного интервала времени после получения синхросигнала (что показано как интервалы 1504 и 1506). В случае, приведенном в качестве примера на фиг.15, заранее определенная задержка установлена такой, что посылка акустического сигнала преобразователем второй измерительной подсистемы происходит во время распространения акустического сигнала, посланного первой измерительной подсистемой, что показывает положение на диаграмме времени приема акустического сигнала первой измерительной подсистемы (интервал 1508). Через определенное время будет получен акустический сигнал, посланный второй измерительной подсистемой (показано интервалом 1510).
Обратимся к фиг.16. В других вариантах осуществления ведущая измерительная подсистема посылает синхросигналы для того, чтобы более непосредственно управлять активизацией пар преобразователей в ведомой измерительной подсистеме. В частности, ведущая измерительная подсистема активизирует пару преобразователей (в этом случае посылает акустический сигнал), что показано как интервал 1600. Параллельно активизации (в частности, между посылкой и приемом акустических сигналов) в момент, выбранный ведущей измерительной подсистемой для активизации пары преобразователей ведомой измерительной системы, ведущая измерительная подсистема посылает синхросигнал. В случае, показанном на фиг.16, синхросигнал посылается в течение времени распространения акустического сигнала от преобразователя первой измерительной подсистемы (временной интервал 1602). Посылка синхросигнала может выполняться любым из описанных выше способов. По команде ведущей измерительной подсистемы ведомая измерительная подсистема сразу активизирует пару преобразователей (в этом случае она посылает акустический сигнал), что показано как интервал 1604. Затем происходит прием (на интервале 1606) акустического сигнала, посланного первой измерительной подсистемой, и затем происходит прием (интервал 1608) акустического сигнала, посланного второй измерительной подсистемой.
В вариантах синхронизации, описанных к данному моменту, синхросигнал несет малый объем данных. В частности, синхросигнал может представлять собой одно логическое значение (бит), и, следовательно, сигнальные шины (фиг.9 и 11) могут быть одиночными проводами (с общим заземлением) или, возможно, витой парой проводов. Кроме того, если синхросигнал передается через одну или группу плат-процессоров (фиг.10 и 12), синхросигнал также может представлять собой одно логическое значение. В вариантах осуществления, в которых синхросигнал входит в пакетное сообщение (как, например, на фиг.13 или 14), указанное логическое значение может быть включено в содержимое сообщения, или же роль подобного логического значения может играть факт получения сообщения (независимо от его содержимого), что будет считаться получением синхросигнала.
В вариантах осуществления, обсуждавшихся выше, ведущая измерительная подсистема может управлять распределением во времени активизации пар преобразователей ведомой измерительной подсистемы, однако ведущая измерительная подсистема не управляет тем, какая пара преобразователей ведомой измерительной подсистемы активизируется. В альтернативных вариантах осуществления ведущая измерительная подсистема управляет не только синхронизацией, но и тем, какая из пар преобразователей ведомой измерительной подсистемы должна быть активизирована. В вариантах осуществления, в которых ведущая измерительная подсистема управляет выбором того, какой преобразователь (или какую пару преобразователей) следует активизировать, синхросигнал может содержать больше данных, чем одно логическое значение, и может содержать несколько бит, указывающих, какой преобразователь или какую пару преобразователей следует активизировать (например, преобразователь А1 может идентифицироваться значением 000, преобразователь А2 - значением 001 и т.д.). Набор логических значений может передаваться по сигнальным шинам (фиг.9 и 11) в соответствующей кодировке. Кроме того, если синхросигнал передается через одну или группу плат-процессоров (фиг.10 и 12), то синхросигнал также может представлять собой набор логических значений, кодированных для передачи по сигнальным линиям. В вариантах осуществления, в которых синхросигнал входит в пакетное сообщение (см., например, фиг.13 или 14), содержимое сообщения может включать набор логических значений, идентифицирующих пару преобразователей, которую следует активизировать.
Далее обсуждение переходит к синхронизации, основанной на активизации пар преобразователей в течение заранее определенных интервалов времени. В частности, в вариантах осуществления, в которых используются интервалы времени, на каждой плате 202 сбора данных предусмотрен счетчик 234 (фиг.8), на основе которого отсчитывается время. Каждый преобразователь или каждая пара преобразователей активизируется на основе заранее выделенных интервалов времени, определяемых с помощью опорного генератора, имеющегося в счетчике 234. Например, на фиг.17 показана временная диаграмма для вариантов осуществления, в которых активизация преобразователей основана на выделении интервалов времени. На фиг.17 показаны восемь интервалов времени (с номерами от 1 до 8). Пока длится интервал времени 1, первая измерительная подсистема (с хордами А, В, С и D, взятыми для иллюстрации) посылает и принимает акустический сигнал, распространяющийся вдоль хорды А, определенный парой преобразователей (интервал 1700, или А1 на чертеже), и, аналогично, вторая измерительная подсистема (с хордами Е, F, G и Н, взятыми для иллюстрации) посылает и принимает акустический сигнал, распространяющийся вдоль хорды Е, определенный парой преобразователей (интервал 1702, или Е1). Таким образом, использование интервала времени 1 (или любого из интервалов времени, используемых с той же целью) подобно координации между измерительными подсистемами, показанными со ссылками на фиг.15 или 16, за исключением того, что не происходит посылки синхросигнала, специально предназначенного для активизации второй измерительной подсистемы. В следующем интервале времени 2, взятом для иллюстрации, первая измерительная подсистема посылает и принимает акустический сигнал, распространяющийся в противоположном направлении вдоль хорды А (интервал 1704, или А2), и, аналогично, вторая измерительная подсистема посылает и принимает акустический сигнал в противоположном направлении вдоль хорды Е (интервал 1706, или Е2). Процесс продолжается для каждого из интервалов времени и для каждой пары преобразователей и заканчивается в интервале времени 8, показанном на фиг.17, в котором посылаются акустические сигналы вдоль хорды D (интервал 1708, или D2) и хорды Н (интервал 1710, или Н2). Временная диаграмма на фиг.17 является лишь иллюстрацией, и эквивалентным образом можно было бы применить любую временную схему активизации преобразователей, основанную на выделении интервалов времени.
В различных вариантах осуществления, основанных на выделении интервалов времени, когда каждая плата 202 сбора данных имеет собственный счетчик 234, то, даже если счетчики 234 начали отсчет одновременно, например, при включении питания, все же небольшие различия в тактовых частотах таймеров при определении интервалов времени могут привести к рассогласованию интервалов времени в разных измерительных подсистемах. Чтобы решить эту проблему, в вариантах осуществления, использующих интервалы времени, осуществляется периодический обмен синхросигналами. Синхросигнал в таких вариантах осуществления предназначен скорее не для непосредственной активизации преобразователей, а для достаточно точной синхронизации счетчиков 234. Например, при получении синхросигнала, плата 234 сбора данных 234 может устанавливать счетчик на заранее определенное значение (например, нуль). В вариантах осуществления, в которых синхросигнал устанавливает счетчики на заранее определенное значение, синхросигнал может представлять собой логическое значение, передаваемое так, как обсуждалось выше, или же сигналом может служить сам факт получения синхронизирующего сообщения, как при передаче сообщений пакетами.
В других вариантах осуществления синхросигнал может нести данные о значении, на которое должен быть установлен каждый счетчик. Например, синхросигнал, посланный по сигнальной шине 250, взятой в качестве примера, может содержать ряд логических значений, прямо или косвенно определяющих значение, на которое будет установлен счетчик. В других вариантах осуществления значение, на которое будет установлен счетчик, может быть включено в содержимое синхросигнала, как при пакетной передаче сообщений.
В вариантах осуществления, основанных на использовании интервалов времени, счетчики должны лишь периодически синхронизироваться с периодом, обусловленным точностью таймеров, связанных со счетчиками. Если таймеры на каждой плате сбора данных работают в достаточной мере синхронно в течение длительных интервалов времени, то синхросигнал может потребоваться, например, один раз в неделю или один раз в несколько дней. С другой стороны, если рассогласование между счетчиками происходит быстро, то может потребоваться обмен синхросигналами через каждые несколько часов или минут. Однако в различных вариантах осуществления таймеры, связанные со счетчиками, предполагаются достаточно точными, так что синхросигнал не должен повторяться чаще, чем это обусловлено периодом измерений (равным, например, одной секунде). Источником синхросигналов, которыми обмениваются измерительные подсистемы, может служить, например, одна из подсистем, или же синхросигнал может приниматься от других источников, например, от вычислителя расхода или системы диспетчеризации и сбора данных (SCADA), связанной с расходомером.
На фиг.18 показан способ, соответствующий по меньшей мере части вариантов осуществления. В частности, способ после начала работы (блок 1800 на блок-схеме) переходит к управлению первой измерительной подсистемой расходомера, включающей первую группу пар преобразователей, установленных на муфте (блок 1804). Способ также включает управление второй измерительной подсистемой расходомера, где вторая измерительная подсистема включает вторую группу пар преобразователей, установленных на муфте (блок 1808). Наконец, способ осуществляет координацию моментов активизации пар преобразователей в первой и второй измерительных подсистемах (блок 1812), и затем способ заканчивает работу (блок 1816).
По приведенному здесь описанию специалист в данной области легко может разработать программное обеспечение, предназначенное, как показано в описании, для соответствующих многоцелевых или специализированных средств с целью создания расходомера и/или его компонент, соответствующих различным вариантам осуществления, разработать систему или ее компоненты, реализующие способы, соответствующие различным вариантам осуществления, и/или обеспечить машиночитаемые носители, на которых хранится программное обеспечение, реализующее различные особенности (признаки) данного способа для различных вариантов осуществления.
Приведенное выше обсуждение, как предполагается, является лишь иллюстрирующим принципы данного изобретения и его различные варианты осуществления. Многочисленные вариации и модификации станут очевидными специалистам в данной области при полном понимании данного раскрытия. Предполагается, что следующая далее формула изобретения должна интерпретироваться так, чтобы охватить все такие вариации и модификации.
Способ управления работой измерительных подсистем расходомера. По меньшей мере часть иллюстрирующих изобретение вариантов осуществления представляет собой расходомеры, включающие муфту, определяющую центральный канал для текучей среды, первую группу пар преобразователей, установленных на муфте, первую управляющую электронную схему, электрически связанную с первой группой пар преобразователей, вторую группу пар преобразователей, установленных на муфте, вторую управляющую электронную схему, другую в сравнении с первой управляющей электронной схемой. Первая и вторая управляющие электронные схемы связаны между собой и выполнены с возможностью управления временем активизации соответствующих пар входящих в указанные схемы преобразователей. Технический результат - повышение точности измерения расхода. 2 н. и 18 з.п. ф-лы, 18 ил.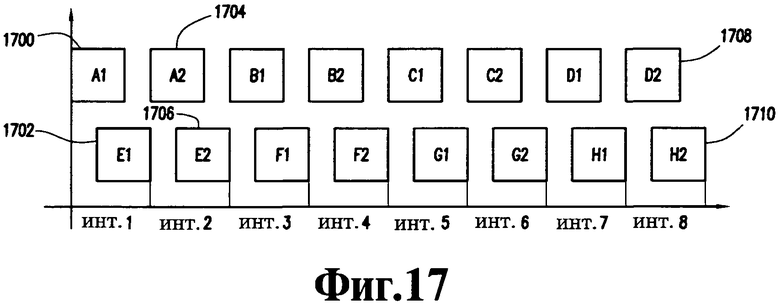
1. Расходомер, включающий муфту, определяющую центральный канал расходомера, первую и вторую группы пар преобразователей, установленных на муфте, первую управляющую электронную схему, электрически связанную с первой группой пар преобразователей и выполненную с возможностью выборочного привода каждой пары преобразователей из первой группы пар преобразователей, и вторую управляющую электронную схему, другую в сравнении с первой схемой, электрически связанную со второй группой пар преобразователей и выполненную с возможностью выборочного привода каждой пары преобразователей из второй группы пар преобразователей, при этом первая и вторая управляющие электронные схемы связаны между собой и выполнены с возможностью согласования привода соответствующих пар преобразователей.
2. Расходомер по п.1, в котором первая управляющая электронная схема содержит первую плату сбора данных, выполненную с возможностью управления приводом первой группы пар преобразователей, а вторая управляющая электронная схема содержит вторую плату сбора данных, выполненную с возможностью управления приводом второй группы пар преобразователей, при этом первая и вторая платы сбора данных связаны друг с другом сигнальной шиной, первая плата сбора данных выполнена с возможностью подачи синхросигнала второй плате сбора данных в момент времени, близкий к моменту активизации пары преобразователей, а вторая плата сбора данных выполнена с возможностью привода пары преобразователей посредством указанного синхросигнала.
3. Расходомер по п.2, в котором первая плата сбора данных выполнена с возможностью подачи синхросигнала при распространении акустического сигнала между парой преобразователей первой группы пар преобразователей, а вторая плата сбора данных выполнена с возможностью возбуждения акустического сигнала от преобразователя второй группы пар преобразователей при получении синхросигнала.
4. Расходомер по п.3, в котором подача синхросигнала осуществляется для определения преобразователя из группы преобразователей второй платы сбора данных, которому следует возбуждать акустический сигнал.
5. Расходомер по п.2, в котором первая плата сбора данных выполнена с возможностью подачи синхросигнала одновременно с возбуждением акустического сигнала от преобразователя первой группы пар преобразователей, а вторая плата сбора данных выполнена с возможностью возбуждения акустического сигнала от преобразователя второй группы преобразователей через заданное время после получения синхросигнала.
6. Расходомер по п.5, в котором подача синхросигнала осуществляется для определения преобразователя из группы преобразователей второй платы сбора данных, которому следует возбуждать акустический сигнал.
7. Расходомер по п.2, в котором первая управляющая электронная схема дополнительно содержит первую плату-процессор, содержащую первый процессор, связанный с первой платой сбора данных и выполненный с возможностью приема представлений полученных акустических сигналов от первой платы сбора данных, а вторая управляющая электронная схема дополнительно содержит вторую плату-процессор, содержащую второй процессор, связанный со второй платой сбора данных и выполненный с возможностью приема представлений полученных акустических сигналов от второй платы сбора данных.
8. Расходомер по п.2, который дополнительно включает процессор, связанный с первой и второй платами сбора данных и выполненный с возможностью приема соответствующих представлений полученных акустических сигналов от первой и второй плат сбора данных.
9. Расходомер по п.1, который дополнительно включает первый и второй счетчики, при этом первая управляющая электронная схема содержит первый счетчик, первую плату сбора данных, выполненную с возможностью управления приводом первой группы пар преобразователей и приводом каждой пары преобразователей первой группы пар преобразователей в заранее заданные интервалы времени, определенные значением первого счетчика, а вторая управляющая электронная схема содержит второй счетчик, вторую плату сбора данных, выполненную с возможностью управления приводом второй группы пар преобразователей и приводом каждой пары преобразователей второй группы преобразователей в заранее заданные интервалы времени, определенные значением второго счетчика, причем первая плата сбора данных выполнена с возможностью периодической подачи синхросигнала второй плате сбора данных, а вторая плата сбора данных выполнена с возможностью регулировки второго счетчика по первому счетчику посредством синхросигнала.
10. Расходомер по п.9, в котором вторая управляющая схема выполнена с возможностью по меньшей мере установки определенного значения второго счетчика и/или установки значения, указанного синхросигналом.
11. Расходомер по п.1, в котором первая управляющая электронная схема содержит первую плату-процессор, содержащую первый процессор, и первую плату сбора данных, связанную с первым процессором, выполненную с возможностью управления приводом первой группы пар преобразователей и приводом каждой пары преобразователей первой группы преобразователей в заранее заданные интервалы времени, определенные значением первого счетчика, а вторая управляющая электронная схема содержит вторую плату-процессор, содержащую второй процессор, и вторую плату сбора данных, связанную со вторым процессором, выполненную с возможностью управления приводом второй группы пар преобразователей и приводом каждой пары преобразователей второй группы пар преобразователей в заранее заданные интервалы времени, определенные значением второго счетчика, при этом первый процессор выполнен с возможностью периодической подачи синхросигнала второму процессору, а вторая плата сбора данных выполнена с возможностью регулировки второго счетчика по первому счетчику посредством синхросигнала.
12. Расходомер по п.11, в котором вторая плата сбора данных выполнена с возможностью по меньшей мере установки определенного значения второго счетчика и/или установки значения, указанного синхросигналом.
13. Расходомер по п.11, в котором первый процессор выполнен с возможностью подачи второму процессору синхросигнала, представляющего собой пакетное сообщение.
14. Способ управления работой измерительных подсистем расходомера, включающий управление первой измерительной подсистемой расходомера, содержащей первую группу пар преобразователей, установленных на муфте расходомера, управление второй измерительной подсистемой расходомера, содержащей вторую группу пар преобразователей, установленных на муфте расходомера, и управление приводом преобразователей первой и второй измерительных подсистем расходомера.
15. Способ по п.14, в котором при управлении приводом преобразователей дополнительно осуществляют обмен сигналами между первой управляющей электронной схемой, связанной с первой измерительной подсистемой, и второй управляющей электронной схемой, другой в сравнении с первой управляющей электронной схемой и связанной со второй измерительной подсистемой.
16. Способ по п.14, в котором при управлении приводом преобразователей дополнительно осуществляют подачу одного логического значения от первой измерительной подсистемы ко второй измерительной подсистеме одновременно с каждым возбуждением пары преобразователей и возбуждают пары преобразователей посредством второй измерительной подсистемы в соответствии с получением указанного логического значения.
17. Способ по п.16, в котором осуществляют привод преобразователей посредством второй измерительной подсистемы при получении указанного логического значения.
18. Способ по п.16, в котором осуществляют привод преобразователей с задержкой при получении указанного логического значения.
19. Способ по п.14, в котором управление приводом преобразователей дополнительно включает подачу значения, указывающего пару преобразователей для привода, от первой измерительной подсистемы ко второй измерительной подсистеме одновременно с каждым приводом пары преобразователей и активизацию второй измерительной подсистемой пары преобразователей, выбранных на основе полученного значения.
20. Способ по п.14, в котором при управлении первой измерительной подсистемой дополнительно осуществляют привод каждой пары преобразователей первой измерительной подсистемы в заранее заданные интервалы времени, которые определяют посредством отсчета времени, который осуществляют первой измерительной подсистемой, а при управлении второй измерительной подсистемой дополнительно осуществляют привод каждой пары преобразователей второй измерительной подсистемы в заранее заданные интервалы времени, которые определяют посредством отсчета времени, который осуществляют второй измерительной подсистемой, причем при управлении приводом преобразователей дополнительно подают синхросигнал от первой измерительной подсистемы ко второй измерительной подсистеме, посредством которого осуществляют синхронизацию отсчета времени второй измерительной подсистемой по отсчету времени, осуществляемому первой измерительной подсистемой.
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Конденсатоотводчик | 1986 |
|
SU1361417A1 |
| УЛЬТРАЗВУКОВОЕ МНОГОКАНАЛЬНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ РАСХОДА | 1997 |
|
RU2138782C1 |

