Настоящая заявка притязает на приоритет предварительной заявки на патент США № 60/864577, которая озаглавлена "Способ поиска сот для системы OFDM", зарегистрирована 6 ноября 2006, принадлежит заявителю настоящей заявки и этим упоминанием включена в текст данного описания.
Область техники
Настоящее изобретение в общем относится к связи и, в частности, к технологиям поиска сот в системе беспроводной связи.
Уровень техники
Системы беспроводной связи широко применяются для предоставления различного информационного контента, например, речи, видео, пакетных данных, обмена сообщениями, обеспечения широковещательной передачи и т.д. Эти беспроводные системы представляют собой системы множественного доступа, которые способны поддерживать множество пользователей за счет совместного использования доступных системных ресурсов. Примеры таких систем множественного доступа включают системы множественного доступа с кодовым разделением каналов (CDMA), системы множественного доступа с временным разделением каналов (TDMA), системы множественного доступа с частотным разделением каналов (FDMA), системы множественного доступа с ортогональным частотным разделением (OFDMA) и системы множественного доступа с частотным разделением и одной несущей (SC-FDMA).
Система беспроводной связи может включать любое число базовых станций, которые могут поддерживать связь для любого числа пользовательских терминалов (UE). Пользовательский терминал (например, сотовый телефон) может находиться в зоне покрытия одной, множества либо ни одной из базовых станций в любой конкретный момент времени. Пользовательский терминал может быть только что включен или может потерять обслуживание и, таким образом, может не знать того, сигнал каких базовых станций может быть принят. Пользовательский терминал может выполнять поиск сот, чтобы обнаружить базовые станции, и получить временные характеристики и другую информацию для обнаруженных базовых станций. Кроме того, пользовательский терминал может обмениваться информацией с одной или более базовыми станциями и может быть подвижным. Пользовательский терминал может выполнять поиск сот, чтобы обнаружить более подходящие базовые станции для обслуживания этого терминала.
Каждая базовая станция может передавать сигналы синхронизации, чтобы помочь пользовательским терминалам в выполнении поиска сот. В общем случае сигнал синхронизации может представлять собой любой сигнал, который позволяет приемнику обнаружить передатчик и получить информацию о передатчике, например, временные характеристики и реквизиты. Сигналы синхронизации представляют собой накладные расходы и должны передаваться как можно более эффективным образом. Кроме того, сигналы синхронизации должны позволить пользовательским терминалам выполнять поиск сот как можно быстрее и эффективнее.
Сущность изобретения
Здесь описаны методики передачи сигналов маяка, призванные помочь пользовательским терминалам выполнить поиск сот. Кроме того, здесь описаны методики обнаружения сигналов маяка. Согласно одному из аспектов реализации настоящего изобретения, сотам в системе могут быть присвоены конфигурации маяка, которые задают на основе ортогональной группировки поднесущих. U поднесущих, используемых для маяка, могут быть организованы в G ортогональных групп, каждая из которых включает S поднесущих. На основе G групп по S поднесущих может быть задано P=SG различных конфигураций маяка. Каждой конфигурации маяка может быть поставлена в соответствие конкретная поднесущая в каждой группе, чтобы использовать ее для сигнала маяка. Базовая станция соты может генерировать сигнал маяка на основе конфигурации маяка для этой соты. Пользовательский терминал может обнаруживать сигнал маяка от соты на основе конфигурации маяка.
Согласно другому аспекту реализации настоящего изобретения соты в системе могут передавать свои сигналы маяка на пониженных уровнях мощности вместо полной мощности. Мощность передачи для сигнала маяка от каждой соты можно регулировать и определять на основе расчетной вероятности обнаружения, расчетной вероятности ложного срабатывания и т.д. Разные соты могут использовать разные уровни мощности передачи для своих сигналов маяка, чтобы достичь требуемой эффективности обнаружения при одновременном снижении помех для других сот.
Согласно следующему аспекту реализации настоящего изобретения пользовательский терминал может выполнять перекрывающиеся дискретные преобразования Фурье (DFT), чтобы "захватить" больше принимаемой мощности, когда временные характеристики символов в пользовательском терминале не совпадают с временными характеристиками символов обнаруживаемых сот, что может иметь место в асинхронной системе. Пользовательский терминал может выполнять первые быстрые преобразования Фурье на основе временных характеристик первого символа, чтобы получить первые принятые символы для множества поднесущих. Кроме того, пользовательский терминал может выполнять вторые быстрые преобразования Фурье на основе временных характеристик второго символа, чтобы получить вторые принятые символы для множества поднесущих. Временные характеристики второго символа могут иметь смещение относительно временных характеристик первого символа на фиксированную или регулируемую часть периода символа. Принимаемая мощность множества поднесущих может быть определена на основе первых и вторых принятых символов и может быть использована для обнаружения сигналов маяка от сот.
Согласно еще одному аспекту реализации настоящего изобретения пользовательский терминал может выполнять обнаружение маяков с использованием декодирования методом максимального правдоподобия. Пользовательский терминал может определять принимаемую мощность множества поднесущих, используемых для сигналов маяка, и может суммировать принимаемую мощность поднесущих для каждой из возможных конфигураций маяка. Затем пользовательский терминал может выполнить обнаружение сот на основе суммарной принимаемой мощности для каждой из возможных конфигураций маяка. Пользовательский терминал может сравнить суммарную принимаемую мощность для каждой конфигурации маяка с пороговым значением и может признать соту обнаруженной для каждой конфигурации маяка с суммарной принимаемой мощностью, превышающей пороговое значение.
Различные аспекты и отличительные особенности настоящего изобретения более подробно описаны ниже.
Краткое описание чертежей
На Фиг.1 показана система беспроводной связи.
На Фиг.2 показана передача трех сигналов синхронизации.
На Фиг.3 показано использование ортогональной группировки поднесущих для сигналов маяка.
На Фиг.4 показана передача маяка одной сотой.
На Фиг.5 показана передача маяка тремя асинхронными сотами.
На Фиг.6 показана демодуляция по схеме OFDM (Orthogonal Frequency Division Multiplexing, Мультиплексирование с ортогональным частотным разделением сигналов) в асинхронной системе.
На Фиг.7 показана демодуляция по схеме OFDM при перекрывающихся дискретных преобразованиях Фурье (DFT).
На Фиг.8 показаны поднесущие, являющиеся кандидатами для сигналов маяка от множества сот.
На Фиг.9 показаны структурные схемы Узла В и пользовательского терминала.
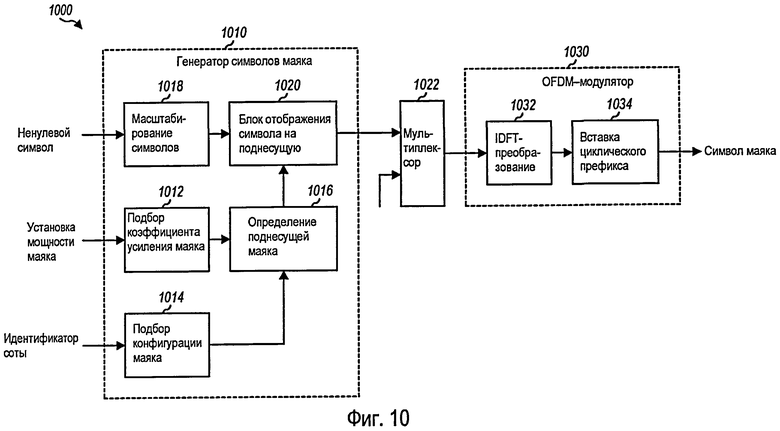
На Фиг.10 показана структурная схема генератора сигнала маяка в Узле В.
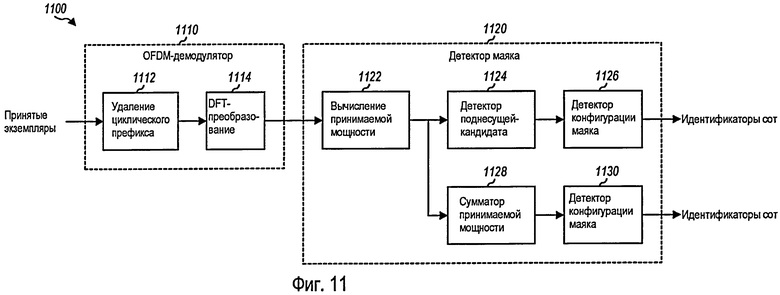
На Фиг.11 показана структурная схема обработчика маяка в пользовательском терминале.
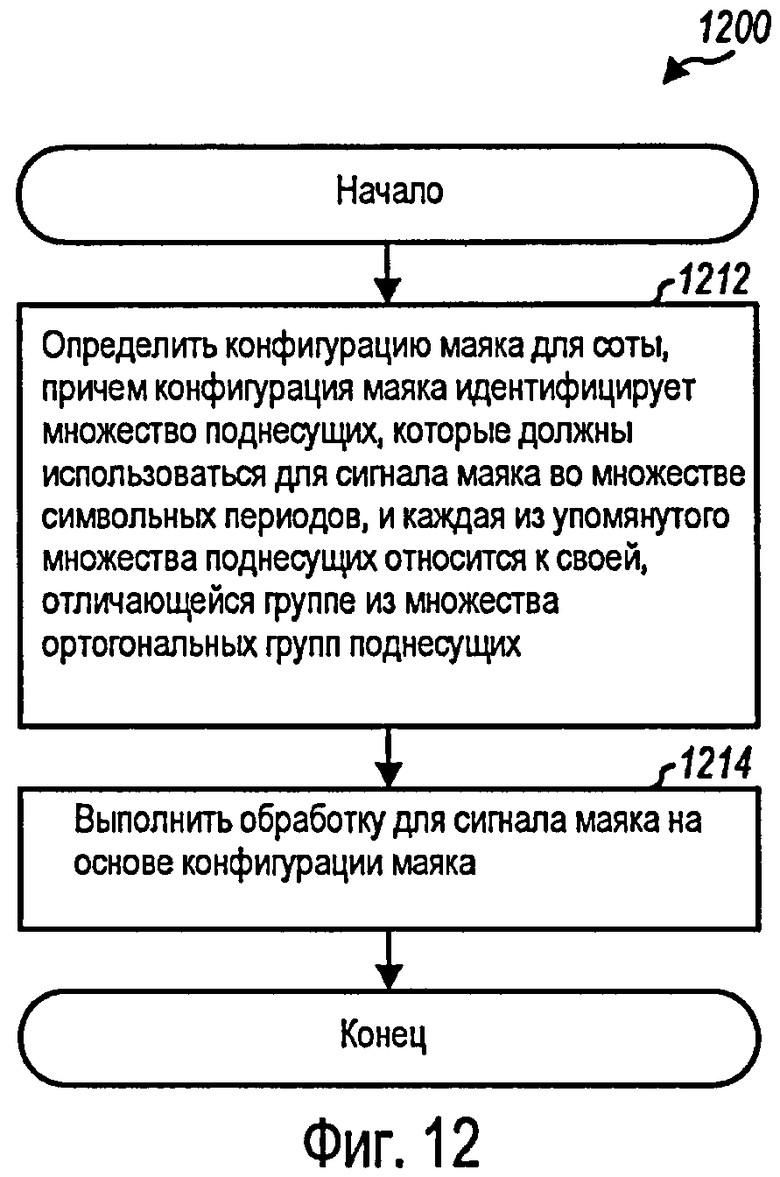
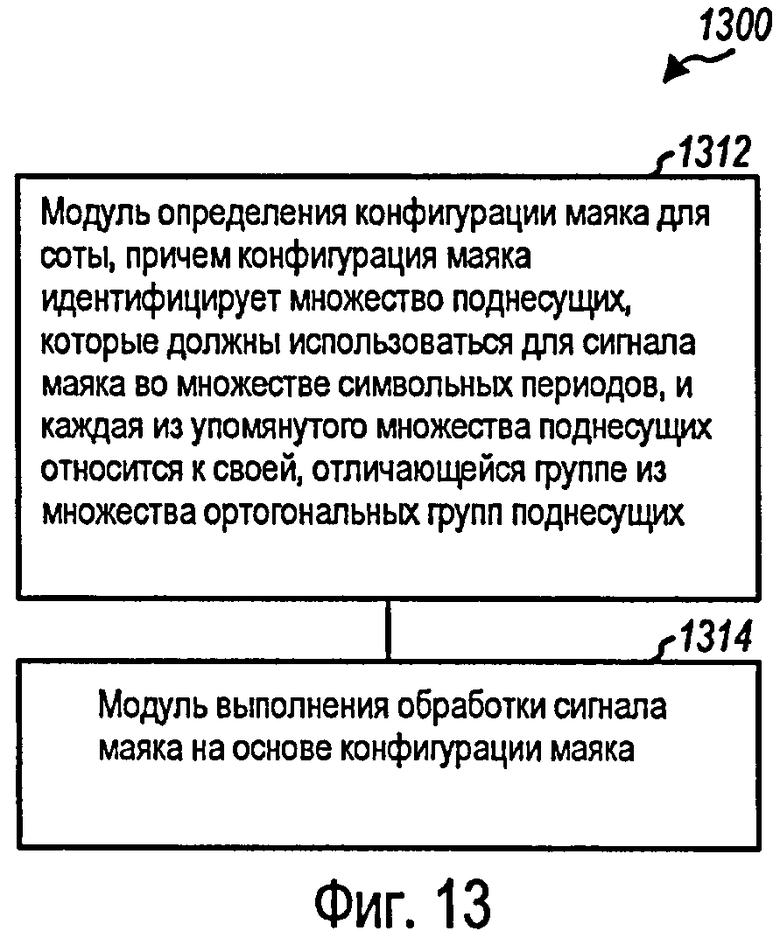
На Фиг.12 и 13 показаны соответственно способ и устройство для обработки сигнала маяка.
На Фиг.14 и 15 показаны соответственно способ и устройство для передачи маяка с регулируемой мощностью передачи.
На Фиг.16 и 17 показаны соответственно способ и устройство для обнаружения маяка пользовательским терминалом.
На Фиг.18 и 19 показаны соответственно способ и устройство для обнаружения маяка с использованием декодирования методом максимального правдоподобия.
Подробное описание
Описанные здесь методики могут использоваться для различных систем беспроводной связи, таких как CDMA, TDMA, FDMA, OFDMA, SC-FDMA и других. Термины "система" и "сеть" часто используются взаимозаменяемым образом. В системе CDMA могут быть реализованы такие технологии радиосвязи, как UTRA (Universal Terrestrial Radio Access - Интерфейс наземного радиодоступа в систему UMTS (Universal Mobile Telecommunication System - Универсальная система мобильной связи)), cdma2000 и т.д. UTRA включает W-CDMA (Wideband-CDMA - Широкополосная система CDMA) и другие варианты CDMA. Технология cdma2000 охватывает стандарты IS-2000, IS-95 и IS-856. В системе TDMA могут быть реализованы такие технологии радиосвязи, как GSM (Global System for Mobile Communications - Глобальная система мобильной связи). В системе OFDMA могут быть реализованы такие технологии радиосвязи, как E-UTRA (Evolved UTRA, Усовершенствованная UTRA), UMB (Ultra Mobile Broadband - Система ультрамобильных сетей широкополосного доступа), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, Flash-OFDM® и т.д. UTRA, E-UTRA и GSM являются частью системы UMTS. LTE (Long Term Evolution - Программа долгосрочного развития) проекта 3GPP представляет собой подготавливаемую версию системы UMTS, в которой применяется E-UTRA, использующая OFDMA на нисходящем канале и SC-FDMA на восходящем канале. UTRA, E-UTRA, GSM, UMTS и LTE описаны в документах организации, названной 3GPP (3-rd Generation Partnership Project - Проект партнерства по развитию сетей 3-го поколения). Технологии cdma2000 и UMB описаны в документах организации, названной 3GPP2 (3-rd Generation Partnership Project 2 - Проект 2 партнерства по развитию сетей 3-го поколения). Эти различные технологии радиосвязи и стандарты известны в данной области техники. Для ясности некоторые аспекты упомянутых методик описаны ниже для LTE, и в большей части приведенного ниже описания используется терминология LTE.
В LTE используется мультиплексирование с ортогональным частотным разделением сигналов (OFDM) на нисходящем канале и мультиплексирование с частотным разделением и одной несущей (SC-FDM) на восходящем канале. OFDM и SC-FDM делят полосу частот системы на множество (К) ортогональных поднесущих, которые также обычно называют тонами, контейнерами и т.д. Интервалы между соседними поднесущими могут быть фиксированными, и общее число (К) поднесущих может зависеть от полосы частот системы. Каждая поднесущая может быть модулирована данными. В общем случае символы модуляции посылают в частотную область с OFDM и во временную область с SC-FDM. Чтобы сгенерировать OFDM-символ, символы с ненулевыми значениями могут быть отображены на поднесущие, используемые для передачи, а символы с нулевым значением могут быть отображены на оставшиеся поднесущие. К символов для общего числа К поднесущих может быть преобразовано во временную область, чтобы получить К экземпляров во временной области. Последние С экземпляров могут быть скопированы и добавлены спереди К экземпляров, чтобы получить OFDM-символ, содержащий К+С экземпляров. Скопированные экземпляры называются циклическим префиксом, а С называется длиной циклического префикса.
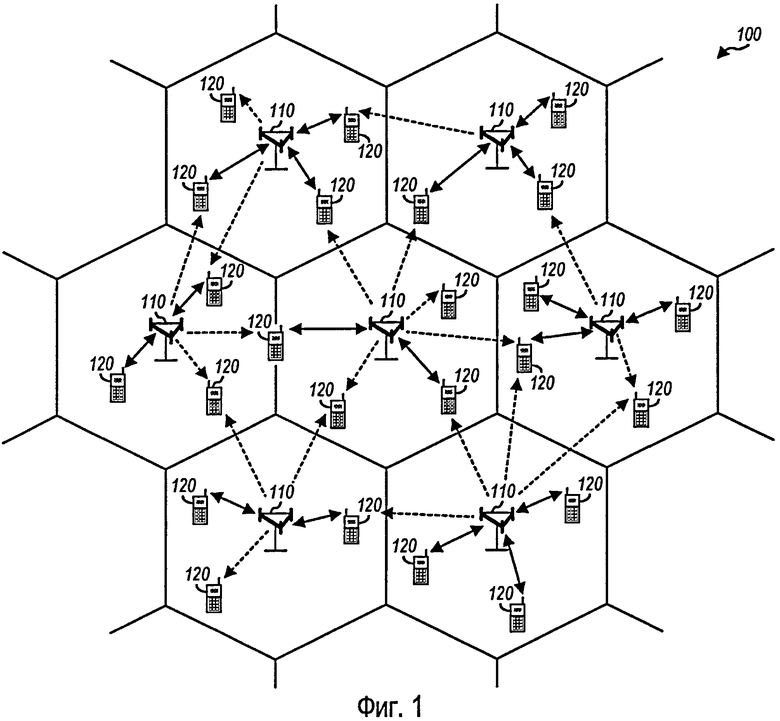
На Фиг.1 показана система 100 беспроводной связи с множеством Узлов В 110. Узел В может представлять собой фиксированную станцию, используемую для обмена информацией с пользовательскими терминалами и может также называться усовершенствованным Узлом В (eNB, evolved Node B), базовой станцией, точкой доступа и т.д. Каждый Узел В 110 обеспечивает покрытие конкретного географического района. Общая зона покрытия каждого Узла В может быть разделена на множество (например, три) меньших зоны. В 3GPP термин "сота" может относиться к наименьшей зоне покрытия Узла В и/или подсистеме Узла В, обслуживающей эту зону покрытия. В других системах наименьшую зону покрытия и/или подсистему, обслуживающую эту зону покрытия, могут обозначать термином "сектор". Для ясности ниже в описании используется термин "сота" согласно концепции 3GPP.
Пользовательские терминалы 120 могут быть разбросаны по системе. Пользовательский терминал может быть неподвижным или мобильным и также может называться мобильной станцией, терминалом доступа, абонентским модулем, станцией и т.д. Пользовательский терминал может представлять собой сотовый телефон, персональный цифровой помощник (PDA), беспроводной модем, устройство беспроводной связи, карманное устройство, переносной компьютер, беспроводной телефон и т.д. Пользовательский терминал может обмениваться информацией с одним или более Узлами В посредством циклов передачи по нисходящему или восходящему каналу. Нисходящий канал (или прямая линия) относится к каналу связи от Узлов В к пользовательским терминалам, а восходящий канал (или обратный канал) относится к каналу связи от пользовательских терминалов к Узлам В. На Фиг.1 сплошная линия с двумя стрелками указывает обмен информацией между Узлом В и пользовательским терминалом. Пунктирная линия с одной стрелкой указывает пользовательский терминал, принимающий сигнал нисходящего канала от Узла В. Пользовательский терминал может выполнять поиск сот на основе сигналов нисходящего канала, переданных Узлами В.
В системе 100 Узлы В 110 могут передавать сигналы синхронизации, чтобы позволить пользовательским терминалам 120 обнаруживать Узлы В и получать такую информацию, как временные характеристики, частотный сдвиг, идентификатор (ID) соты и т.д. В Таблице 1 указаны три типа сигналов синхронизации, которые могут быть переданы Узлом В, а также приведено краткое описание для каждого типа сигнала синхронизации.
PSC и SSC для E-UTRA описаны в документе TS 36.211 проекта 3GPP, озаглавленном "Физические каналы и модуляция", июнь 2007. PSC и SSC для UTRA описаны в документе TS 25.213 проекта 3GPP, озаглавленном "Расширение и модуляция", май 2007. Документы проекта 3GPP находятся в открытом доступе. BSC может генерироваться описанным ниже образом.
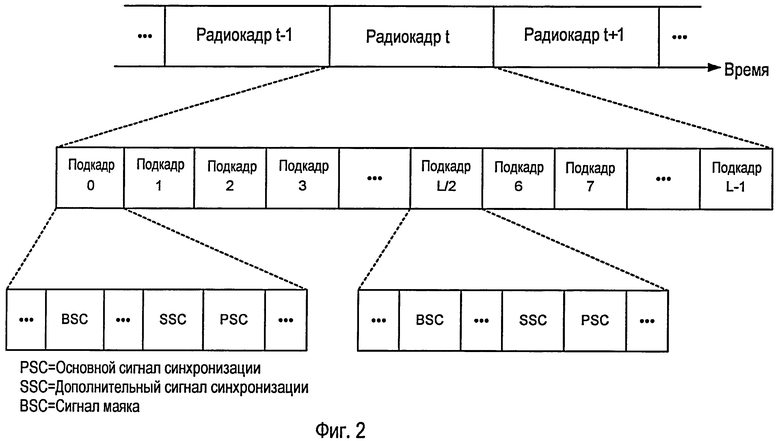
На Фиг.2 показана примерная передача трех сигналов синхронизации, указанных в Таблице 1, согласно одному из вариантов реализации настоящего изобретения. Время передачи для нисходящего канала может быть разделено на блоки радиокадров. Каждый радиокадр может быть дополнительно разделен на множество (L) подкадров, а каждый подкадр может включать множество (Т) символьных периодов. В одном из вариантов реализации настоящего изобретения каждый радиокадр имеет длительность 10 миллисекунд (мс) и разделен на L=10 подкадров, каждый подкадр имеет длительность 1 мс и разделен на два слота, и каждый слот заключает в себе 6 или 7 символьных периодов в зависимости от длины циклического префикса. Кроме того, радиокадры могут быть разделены с использованием и других схем.
В одном из вариантов реализации настоящего изобретения PSC передается в последнем символьном периоде первого слота в каждом из подкадров 0 и 5, находящихся в начале и в середине радиокадра. SSC передается непосредственно перед PSC в подкадрах 0 и 5. BSC может передаваться в любом оставшемся символьном периоде в подкадре 0 и/или подкадре 5. В общем случае PSC, SSC и BSC могут каждый передаваться с любой скоростью и при этом могут передаваться с одной и той же или разными скоростями передачи. BSC может передаваться дважды в каждом радиокадре (как показано на Фиг.2) или только один раз в каждом радиокадре. В общем случае BSC может передаваться в любом интервале Тмаяк маяка и в любом символьном периоде радиокадра. Для ясности в большей части приведенного ниже описания предполагается, что BSC передается в одном символьном периоде каждого радиокадра, в результате чего интервал Тмаяк маяка равен одному радиокадру.
Соты могут передавать сигналы маяка (или BSC), чтобы позволить пользовательским терминалам обнаруживать и идентифицировать эти соты. Сигнал маяка включает компоненты сигнала высокой мощности в узкой полосе частот (например, на одной или нескольких поднесущих), которые могут обладать значительно более высокой мощностью по сравнению с другими сигналами, например сигналами трафика данных. Сигнал маяка может состоять из последовательности символов маяка. В одном из вариантов реализации настоящего изобретения символ маяка представляет собой OFDM-символ, в котором вся или большая часть совокупной мощности передачи соты используется для одной поднесущей, которую называют поднесущей маяка или тоном маяка. В других вариантах реализации настоящего изобретения символ маяка может располагать всей или большой частью совокупной мощности на небольшом числе поднесущих. Для ясности в приведенном далее описании предполагается применение такого варианта, при котором символ маяка использует одну поднесущую маяка. Так как всего лишь на одной поднесущей передается большое количество энергии, то сигнал маяка может быть надежно обнаружен даже при низком отношении "сигнал-шум" (SNR). Такая информация, как идентификатор соты, может быть передана посредством частотной локализации поднесущих маяка в последовательных символах маяках.
Сигналы маяка должны иметь такую структуру, чтобы соты, передающие эти сигналы, могли быть обнаружены и идентифицированы пользовательскими терминалами надежным образом. Кроме того, пользовательские терминалы должны быть способны обнаруживать сигналы маяка без информации по временным характеристикам. Это может потребоваться в асинхронной системе, в которой каждая сота может осуществлять передачу, исходя из своих временных характеристик. Сигнал маяка для каждой соты может иметь такую структуру, чтобы сота могла быть идентифицирована на основе размещения поднесущих маяка в радиокадрах.
На Фиг.3 показана структура сигналов маяка, в основе которой лежит ортогональная группировка поднесущих. При такой структуре для маяка подходит U поднесущих, которые можно организовать в G ортогональных групп таким образом, чтобы каждая используемая поднесущая принадлежала только к одной группе, где как U, так и G могут иметь целочисленное значение. Ортогональные группы могут также называться неперекрывающимися группами, дизъюнктивными группами и т.д. Каждая группа может включать S поднесущих, которые могут, но не обязательно, представлять собой последовательные поднесущие из U=G·S используемых поднесущих. На основе G групп по S поднесущих может быть определено P=SG различных конфигураций маяка. Каждая конфигурация маяка может иметь длину G и может быть поставлена в соответствие конкретной поднесущей маяка в первой группе, конкретной поднесущей маяка во второй группе и так далее и конкретной поднесущей маяка в последней группе. Как показано на Фиг.3, разные конфигурации маяка могут быть поставлены в соответствие разным последовательностям поднесущих маяка в G группах. Для каждой конфигурации маяка g-й символ маяка в конфигурации может занимать одну из S поднесущих в группе g, где g  {0,…,G-1}. Каждую конфигурацию маяка можно рассматривать как составляемую из G недвоичных символов. Каждый недвоичный символ имеет одно из U возможных значений и идентифицирует конкретную поднесущую, которую нужно использовать для символа маяка.
{0,…,G-1}. Каждую конфигурацию маяка можно рассматривать как составляемую из G недвоичных символов. Каждый недвоичный символ имеет одно из U возможных значений и идентифицирует конкретную поднесущую, которую нужно использовать для символа маяка.
Для идентификаторов Р сот можно использовать Р различных конфигураций маяка, при этом идентификатор каждой соты ставят в соответствие своей конфигурации маяка. Специфичные для сот конфигурации маяка могут быть использованы пользовательскими терминалами для обнаружения сот и идентификации обнаруженных сот.
В одном из вариантов реализации настоящего изобретения для полосы частот 1,25 МГц имеется в сумме 75 поднесущих с интервалом между поднесущими 15 кГц. U=24 поднесущих (или приблизительно каждая третья поднесущая) подходят для маяка и отстоят друг от друга на 45 кГц. 24 используемых поднесущих организованы в G=3 группы, где каждая группа включает S=8 поднесущих. В трех группах по 8 поднесущих каждая в сумме может быть определено Р=83=512 конфигураций маяка. Каждая конфигурация маяка поставлена в соответствие конкретной поднесущей маяка в первой группе, конкретной поднесущей во второй группе и конкретной поднесущей в третьей группе.
В общем случае число групп (G) и число поднесущих (S) в каждой группе может выбираться с учетом различных факторов, таких как общее число поднесущих, требуемый интервал между используемыми поднесущими, требуемое число конфигураций маяка, требуемая длина конфигураций маяка и т.д. Больший интервал между используемыми поднесущими может сделать возможным более точное обнаружение поднесущих маяка пользовательскими терминалами при наличии частотного сдвига, но может в результате привести и к меньшему числу используемых поднесущих. Число конфигураций маяка может диктоваться числом идентификаторов сот, поддерживаемых системой. Длина конфигурации маяка может определяться требуемым временем обнаружения маяка, которое представляет собой число символов маяка, необходимых для обнаружения сот.
Использование ортогональной группировки поднесущих делает возможным обнаружение сигналов маяка от сот даже при наличии неясности в отношении временных характеристик. Пользовательский терминал может не иметь информации по временным характеристикам обнаруживаемых сот. Это может иметь место, например, в асинхронной системе, в которой временные характеристики разных сот не синхронизированы. Если пользовательский терминал обнаруживает поднесущую маяка в группе g в данном символе маяка, то пользовательский терминал знает, что нужно искать поднесущую маяка в группе (g+1) mod G в очередном символе маяка, искать поднесущую маяка в группе (g+2) mod G в следующем символе маяка и т.д., где "mod" обозначает операцию по модулю. Пользовательский терминал может быть выполнен с возможностью определить временные характеристики кадра для сигнала маяка, зная группу, в которой обнаружена поднесущая маяка. Таким образом, благодаря использованию ортогональной группировки поднесущих отсутствует неясность относительно временных сдвигов.
В другом варианте реализации настоящего изобретения каждой соте назначают специфичный для нее код маяка, который идентифицирует, какую поднесущую использовать в качестве поднесущей маяка в каждом символе маяка. Код маяка может представлять собой код Рида-Соломона или некоторый другой код с максимальной разнесенностью (MDS, Maximum Distance Separable). MDS-код может генерировать кодовые слова, имеющие наибольшее из возможных минимальное расстояние между кодовыми словами и, таким образом, обеспечивать максимальные возможности корректировки ошибок для заданной степени избыточности. Код маяка может также представлять собой код без запятой, который отображает кодовое слово и все циклические сдвиги этого слова в один и тот же идентификатор соты. Например, кодовое слово может состоять из трех недвоичных символов {A, B, C}. Код без запятой отобразил бы кодовое слово {A, B, C}, а также все его циклически смещенные версии {B, C, A} и {C, A, B} в один и тот же идентификатор соты. Это свойство позволяет пользовательскому терминалу идентифицировать соту без информации по временным характеристикам, на основе любых трех последовательных недвоичных символов.
В одном из примеров варианта применения кода Рида-Соломона для маяка можно использовать М поднесущих, которым присвоены индексы от 0 до М-1, где М может быть любым подходящим целым числом. Для символа маяка, передаваемого в радиокадре t, поднесущая kt маяка может быть выражена следующим образом:

 Уравнение (1),
Уравнение (1),
где p1 - примитивный элемент поля ZM и  ,
,
α1 и α2 - экспоненциальные коэффициенты, определяемые идентификатором соты,
Z - верхняя граница диапазона для α1 и
 обозначает сложение по модулю.
обозначает сложение по модулю.
Поле ZM содержит М элементов от 0 до М-1. Примитивный элемент поля ZM представляет собой элемент ZM, который может использоваться для генерации всех М-1 ненулевых элементов ZM. Например, Z7 содержит семь элементов от 0 до 6, и 5 - примитивный элемент Z7, который может быть использован для генерации всех шести ненулевых элементов Z7 следующим образом: 50 mod 7=1, 51 mod 7=5, 52 mod 7=4, 53 mod 7=6, 54 mod 7=2 и 55 mod 7=3. kt представляет собой элемент поля ZM.
В Уравнении (1) арифметические операции выполняются по полю ZM. Например, сложение А и В может быть задано как (А+В) mod М, умножение А на В может быть задано как (А·В) mod М, возведение А в степень В может быть задано как АВ mod М и т.д. Сложения внутри экспонент представляют собой сложения целых чисел по модулю М.
Коды разных маяков могут быть заданы с использованием разных значений Z и М. Экспоненциальные коэффициенты α1 и α2 зависят от Z и М или, если говорить более конкретно, 0≤α1<Z и 0≤α2<(М-1). Код маяка, приведенный в Уравнении (1), является периодическим с периодом Q=M/Z символов. Следовательно, kt=kt+Q для любого данного t.
Идентификатор соты может быть отображен в α1 и α2 следующим образом:
Идентификатор соты=(М-1)·α1+α2
 Уравнение (2)
Уравнение (2)
или
Идентификатор соты=α1+Z·α2.
Число поддерживаемых идентификаторов сот зависит от значений М и Z.
Код маяка, приведенный в Уравнении (1), может быть использован для генерации конфигураций маяка для всех возможных идентификаторов сот. Для этого кода маяка можно показать, что пользовательский терминал может обнаруживать отдельную соту с использованием любых двух последовательных или непоследовательных символов маяка даже без информации по временным характеристикам. Пользовательский терминал может обнаруживать две соты с использованием трех последовательных символов маяка.
Для маяка также могут быть использованы и другие коды маяка. В общем случае код маяка длиной V может быть задан в поле Галуа (U) таким образом, что будет существовать Р кодовых слов для Р идентификаторов сот. Каждое кодовое слово может состоять из V недвоичных символов. Каждый недвоичный символ может идентифицировать одну из U поднесущих, которую необходимо использовать как поднесущую маяка. Большее значение длины V может означать более высокий уровень сложности для пользовательских терминалов, но может обеспечивать больший выигрыш при кодировании. Сота может быть обнаружена на основе В недвоичных символов кодового слова, где 2≤B≤V. Это гарантирует, что при высоком значении отношения SNR сота может быть обнаружена с использованием всего лишь поднабора кодового слова, что может уменьшить время поиска соты.
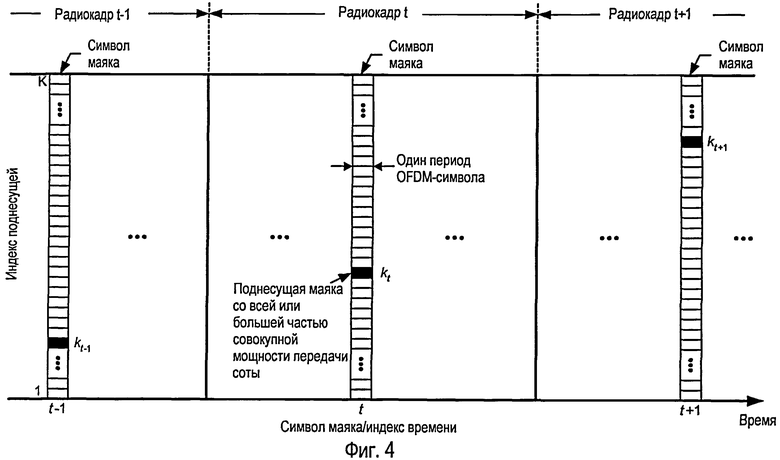
На Фиг.4 показана структура сигнала маяка от одной соты. При такой структуре сигнал маяка состоит из одного символа маяка в каждом радиокадре. Каждый символ маяка характеризуется всей или большой частью совокупной мощности передачи соты, сосредоточенной в одной поднесущей маяка, которую определяют, исходя из конфигурации маяка для соты. Конфигурация маяка может быть основана на ортогональной группировке поднесущих, коде маяка и т.д. Как показано на Фиг.4, для разных символов маяка могут быть использованы разные поднесущие маяка и поднесущая маяка может меняться от одного символа маяка к следующему. В примере, показанном на Фиг.4, для символа маяка, передаваемого в радиокадре t-1, используют поднесущую kt-1, для символа маяка, передаваемого в радиокадре t, используют поднесущую kt, для символа маяка, передаваемого в радиокадре t+1, используют поднесущую kt+1 и т.д.
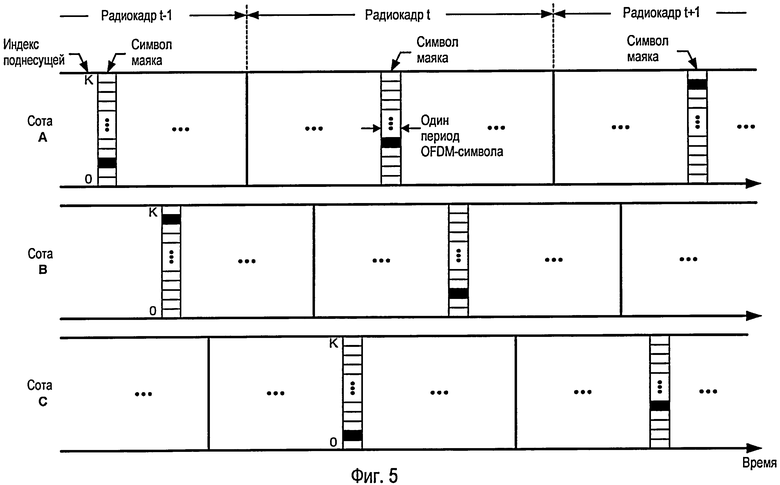
На Фиг.5 показана примерная передача маяков тремя сотами А, В и С в асинхронной системе. В этом варианте реализации настоящего изобретения каждая сота передает один символ маяка в одном символьном периоде каждого радиокадра, и эти три соты могут передавать свои символы маяка в разные моменты времени. Каждая сота может определить поднесущую маяка для каждого символа маяка на основе конфигурации маяка для этой соты.
Согласно другому аспекту соты в системе могут передавать свои сигналы маяка при пониженных уровнях мощности вместо полной мощности. Мощность передачи для сигнала маяка от каждой соты может быть определена на основе различных параметров, таких как расчетная вероятность обнаружения, расчетная вероятность ложного срабатывания и т.д. Разные соты могут использовать разные уровни мощности для своих сигналов маяка, при этом по-прежнему обеспечивается требуемая эффективность обнаружения, например, из-за разных размеров сот, разного рельефа местности и т.д. Пониженные уровни мощности для сигналов маяка могут уменьшить помехи для соседних сот, что может улучшить эксплуатационные характеристики системы.
Пользовательский терминал может выполнять обнаружение маяков, чтобы найти соты. С целью обнаружения маяков пользовательский терминал может обрабатывать каждый принятый символ маяка и определять принимаемую мощность U используемых поднесущих. Если пользовательскому терминалу известно положение во времени символов маяка, то пользовательский терминал может обрабатывать только символы маяка и игнорировать все другие OFDM-символы. Если пользовательскому терминалу неизвестно положение во времени символов маяка (например, в асинхронной системе), то пользовательский терминал может обрабатывать каждый принятый OFDM-символ. В любом случае пользовательский терминал может обнаруживать соты на основе принимаемой мощности используемых поднесущих для достаточного числа символов маяка.
В первом варианте реализации настоящего изобретения пользовательский терминал может выполнять жесткое декодирование для обнаружения маяков следующим образом:
1. определить принимаемую мощность всех используемых поднесущих для маяка,
2. обнаружить поднесущие-кандидаты с высокой принимаемой мощностью и
3. идентифицировать соты на основе поднесущих-кандидатов.
Во втором варианте реализации настоящего изобретения пользовательский терминал может выполнять декодирование методом максимального правдоподобия (ML) для обнаружения маяков следующим образом:
1. определить принимаемую мощность всех используемых поднесущих для маяка,
2. суммировать принимаемую мощность для поднесущих маяка в каждой конфигурации маяка и
3. идентифицировать соты на основе суммарной принимаемой мощности для всех конфигураций маяка.
Для обоих вариантов реализации настоящего изобретения пользовательский терминал может сначала определить принимаемую мощность используемых поднесущих. Если соты являются синхронными, то пользовательский терминал может определить временные характеристики символов у сот, выполнить OFDM-демодуляцию на основе известных временных характеристик соты и определить принимаемую мощность используемых поднесущих. Если соты являются асинхронными, то пользовательский терминал может определить принимаемую мощность используемых поднесущих несколькими путями.
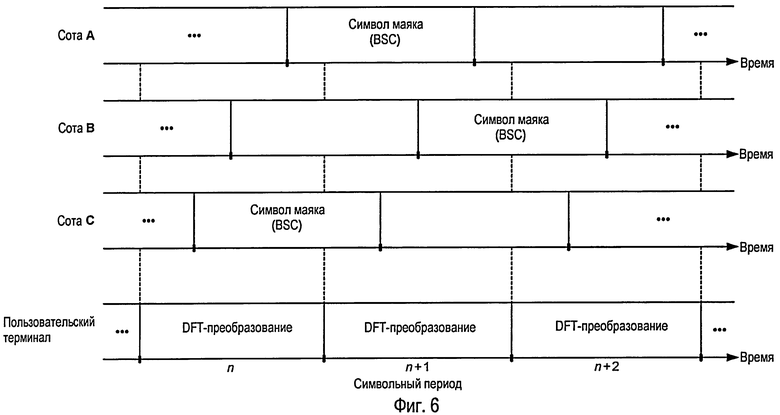
На Фиг.6 показан вариант OFDM-демодуляции, выполняемой пользовательским терминалом в асинхронной системе. В примере, показанном на Фиг.6, три соты А, В и С могут иметь разные временные характеристики OFDM-символов и может отсутствовать возможность совмещения по времени символов маяков от этих сот в пользовательском терминале. Пользовательский терминал может попытаться совместить свои временные характеристики OFDM-символа с одной из сот, например, обслуживающей сотой или сотой с наиболее сильным сигналом (не показано на Фиг.6). Пользовательский терминал может также выполнить OFDM-демодуляцию, не пытаясь совместить свои временные характеристики OFDM-символа с любой сотой (как показано на Фиг.6). В любом случае в каждый период n OFDM-символа пользовательский терминал может выполнить OFDM-демодуляцию путем (i) взятия K принятых экземпляров и отбрасывания С принятых экземпляров для циклического префикса и (ii) выполнения дискретного преобразования Фурье (DFT) для К принятых экземпляров, чтобы получить К принятых символов для поднесущих общим числом К. В DFT-преобразование может входить быстрое преобразование Фурье (FFT) или любой другой тип преобразования.
Пользовательский терминал может вычислить принимаемую мощность Pk,n каждой используемой несущей k в символьном периоде n на основе принятого символа Rk,n для этой поднесущей следующим образом:
Pk,n=|Rk,n|2
 Уравнение (3)
Уравнение (3)
Как показано на Фиг.6, временные характеристики OFDM-символа в пользовательском терминале могут быть не совмещены с символами маяка одной или более сот. Например, в символьном периоде n+1 при выполнении DFT-преобразования берется приблизительно половина символа маяка от соты В, а оставшаяся часть символа берется при выполнении DFT-преобразования в символьном периоде n+2. Если для обнаружения маяка используются принятые символы только от одного DFT-преобразования для символьного периода n+1, либо n+2, то до половины энергии маяка может быть потеряно. Кроме того, может произойти утечка мощности поднесущей маяка в соседние используемые поднесущие. Оба этих явления могут ухудшить эффективность обнаружения.
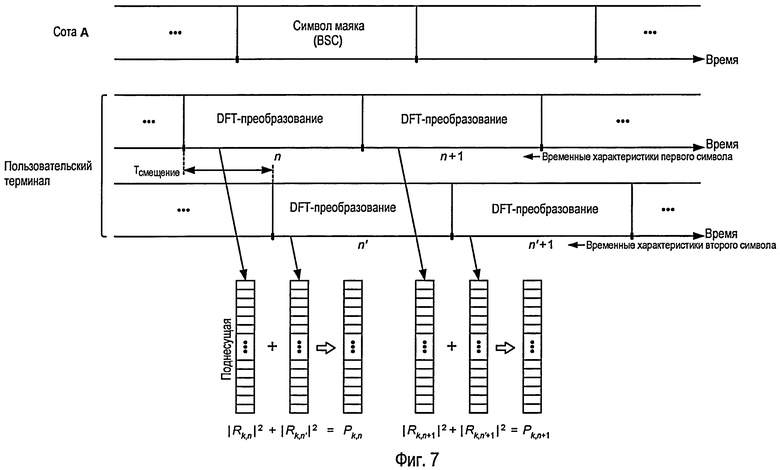
На Фиг.7 показан вариант OFDM-демодуляции с перекрывающимися DFT-преобразованиями, чтобы захватить больше принимаемой мощности от асинхронных сот. В варианте, показанном на Фиг.7, пользовательский терминал может выполнять DFT-преобразование для каждого периода OFDM-символа на основе временных характеристик первого символа, которое можно назвать первым DFT-преобразованием или основным DFT-преобразованием. Пользовательский терминал может также выполнять DFT-преобразование для каждого периода OFDM-символа на основе временных характеристик второго символа, которое можно назвать вторым DFT-преобразованием или дополнительным DFT-преобразованием. Временные характеристики первого символа могут быть произвольными либо могут быть основаны на временных характеристиках обслуживающей соты, соты с наиболее сильным сигналом и т.д. Временные характеристики второго символа могут быть смещены относительно временных характеристик первого символа на Тсмещение, которое может быть фиксированной или регулируемой величиной. Смещение Тсмещение временных характеристик может составлять половину, четверть, три четверти или некоторую другую часть периода Тсим одного OFDM-символа.
Пользовательский терминал может получать принятые символы Rk,n от первого DFT-преобразования для символьного периода n. Кроме того, пользовательский терминал может получать принятые символы Rk,n' от второго DFT-преобразования для символьного периода n', который может перекрываться с символьным периодом n на Тсим-Тсмещение. Пользовательский терминал может определять принимаемую мощность Pk,n каждой используемой поднесущей k следующим образом:
 Уравнение (4)
Уравнение (4)
Пользовательский терминал может также определять принимаемую мощность Pk,n каждой используемой поднесущей k, выбирая больший из двух результатов DFT-преобразования, следующим образом:

Пользовательский терминал может также определить принимаемую мощность каждой используемой поднесущей и другими путями. Например, чтобы получить принимаемую мощность используемой поднесущей, к принятым символам от используемой поднесущей и одной или более поднесущих, находящихся с каждой из сторон используемой поднесущей, может быть применена вырезающая функция.
Как показано на Фиг.7, за счет объединения результатов DFT-преобразований с различными временными характеристиками символов пользовательский терминал сможет захватить весь или большую часть символа маяка от любой соты вне зависимости от смещения временных характеристик между этим терминалом и сотой. В примере, показанном на Фиг.7, символ маяка от соты А может полностью быть захвачен за счет перекрывающихся DFT-преобразований для символьных периодов n и n'.
В общем случае результаты любого числа перекрывающихся DFT-преобразований могут быть объединены некогерентным образом, чтобы получить принимаемую мощность используемых поднесущих. Перекрывающиеся DFT-преобразования могут быть смещены друг относительно друга на любую величину. Некогерентное объединение результатов перекрывающихся DFT-преобразований может улучшить эффективность обнаружения маяка и смягчить влияние плохого совмещения временных характеристик между пользовательским терминалом и обнаруживаемой сотой.
Пользовательский терминал может выполнять дополнительные DFT-преобразования для временных характеристик второго символа таким образом, чтобы уменьшить сложность вычислений. Пользовательский терминал может выполнять дополнительные DFT-преобразования, только если существует приемлемая вероятность захвата символа маяка. В одном из вариантов реализации настоящего изобретения пользовательский терминал может выполнять первое DFT-преобразование для каждого символьного периода на основе временных характеристик первого символа и может выполнять дополнительные DFT-преобразования для каждого первого DFT-преобразования для поднесущих с достаточно сильным сигналом. В другом варианте реализации настоящего изобретения пользовательский терминал может выполнять дополнительные DFT-преобразования в последующих радиокадрах, когда при первом DFT-преобразовании обнаружены поднесущие с сильным сигналом. Используя этот вариант, можно снизить требования по буферизации в пользовательском терминале. В еще одном варианте реализации настоящего изобретения пользовательский терминал может идентифицировать символьные периоды, в которых в данном радиокадре обнаружены поднесущие с сильным сигналом, и может выполнять дополнительные DFT-преобразования в окрестностях идентифицированных символьных периодов в последующих радиокадрах.
В первом варианте реализации настоящего изобретения, где используется жесткое декодирование для обнаружения маяка, пользовательский терминал может сначала определить принимаемую мощность каждой используемой поднесущей в каждом символьном периоде, например, как показано в Уравнениях (3), (4) или (5). Затем пользовательский терминал может сравнить принимаемую мощность каждой используемой поднесущей с пороговым значением THD и признать используемую поднесущую поднесущей-кандидатом, если принимаемая мощность превышает это пороговое значение, следующим образом: Если Pk,n>THD, то признать поднесущую k поднесущей-кандидатом  - Уравнение (6).
- Уравнение (6).
Пользовательский терминал может разделить принимаемую мощность Pk,n на среднюю мощность, чтобы получить нормализованную принимаемую мощность, и затем может сравнить нормализованную принимаемую мощность с пороговым значением THD. Средняя мощность может быть определена в полосе частот маяка, которая может составлять всю полосу частот системы или ее долю. В качестве альтернативы пользовательский терминал может определить пороговое значение THD на основе средней мощности и/или других параметров, таких как расчетная вероятность обнаружения, расчетная вероятность ложного срабатывания и т.д.
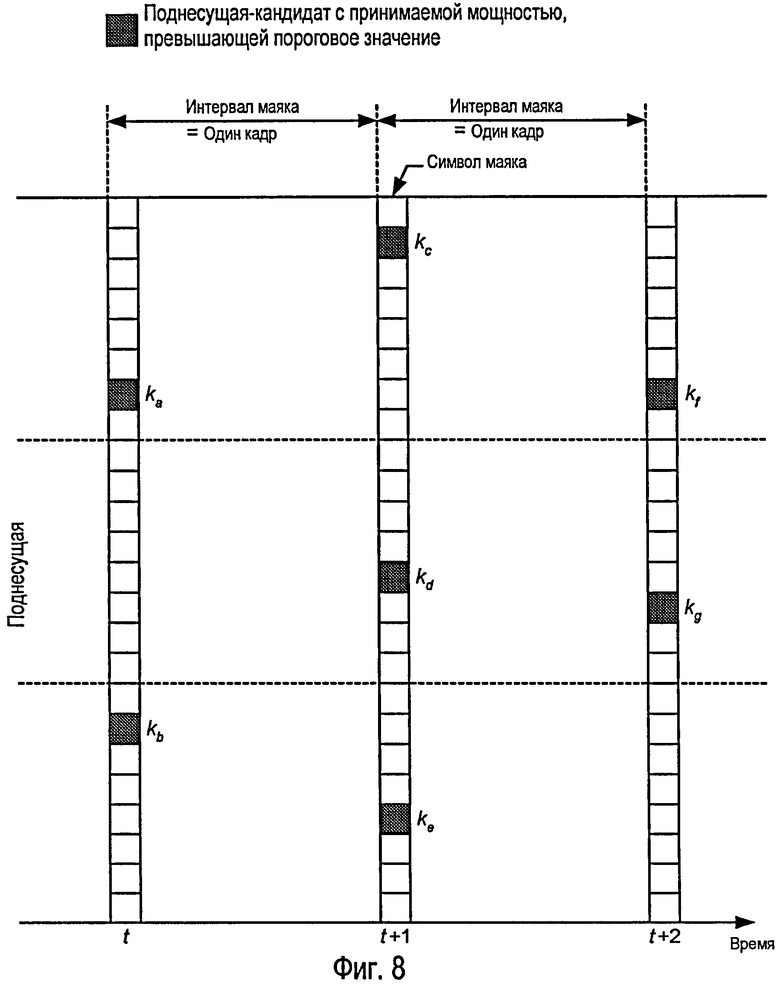
На Фиг.8 показан пример обнаруженных пользовательским терминалом поднесущих-кандидатов для сигналов маяка от нескольких сот. Каждая сота может передавать один символ маяка в одном и том же символьном периоде каждого радиокадра. Затем пользовательский терминал может выполнять обнаружение сот на основе используемых поднесущих в символьных периодах, отстоящих друг от друга на один радиокадр, как показано на Фиг.8. В общем случае пользовательский терминал может получить любое число поднесущих-кандидатов в каждом символьном периоде и каждая поднесущая-кандидат может представлять собой любую из используемых поднесущих. После чего пользовательский терминал может определить, соответствуют ли поднесущие-кандидаты любой из Р возможных конфигураций маяка. Обнаружение конфигураций маяка на основе поднесущих-кандидатов может зависеть от того, каким образом заданы конфигурации маяка.
Для варианта реализации настоящего изобретения, показанного на Фиг.3, каждая конфигурация маяка может иметь три поднесущих маяка в трех группах в трех последовательных радиокадрах. В этом случае для примера, показанного на Фиг.8, поднесущие-кандидаты kb, kd и kf могут принадлежать к одной конфигурации маяка, поднесущие-кандидаты ka, ke и kg могут принадлежать к другой конфигурации маяка (с циклическим смещением) и т.д. Дополнительные конфигурации маяка могут быть обнаружены на основе поднесущих-кандидатов для одного или более дополнительных радиокадров.
В варианте, продемонстрированном Уравнением (1), пользовательский терминал может выполнять декодирование на основе кода маяка, используемого для задания конфигураций маяка. Для простоты пользовательский терминал может получать только две поднесущих-кандидата k1 и k2 в двух радиокадрах t и t+1. Поднесущие-кандидаты могут быть выражены следующим образом:
 и
и Уравнения (7)
Уравнения (7)

Набор Уравнений (7) может быть записан в матричной форме следующим образом:

 Уравнение (8),
Уравнение (8),
где  и
и  равны двум конкретным элементам поля ZM.
равны двум конкретным элементам поля ZM.
Пользовательский терминал может получить решение для членов Уравнения (8)  и
и  следующим образом:
следующим образом:
 Уравнение (9)
Уравнение (9)
Пользовательский терминал может получить экспоненту  следующим образом:
следующим образом:
 Уравнение (10)
Уравнение (10)
Логарифм в Уравнении (10) - по полю ZM, и данное значение y отражается в конкретное значение z. Экспоненциальный коэффициент α1 и временной показатель t могут быть получены из Уравнения (10) следующим образом:
α1=z1 mod Z, b  Уравнение (11а)
Уравнение (11а)
t=z1 div Z  Уравнение (11b)
Уравнение (11b)
Коэффициент α2 может быть определен путем замены t, полученного из Уравнения (11b) на  чтобы получить
чтобы получить  а затем путем нахождения решения для α2 на основе
а затем путем нахождения решения для α2 на основе  . После чего может быть определен идентификатор соты на основе коэффициентов α1 и α2, как показано в Уравнении (2).
. После чего может быть определен идентификатор соты на основе коэффициентов α1 и α2, как показано в Уравнении (2).
Пользовательский терминал может также обнаруживать множество сот при помощи поднесущих-кандидатов для более чем двух радиокадров. В примере, показанном на Фиг.8, пользовательский терминал может определить коэффициенты α1 и α2, для поднесущих-кандидатов ka и kc в радиокадрах t и t+1, и может затем определить конфигурацию маяка для коэффициентов α1 и α2. Далее пользовательский терминал может удостовериться, что эта конфигурация маяка существует, используя поднесущие кандидаты kf и kg в следующем радиокадре. Пользовательский терминал может повторить этот процесс для каждой возможной пары поднесущих-кандидатов в радиокадрах t и t+1.
Во втором варианте реализации настоящего изобретения, где для обнаружения используется декодирование методом максимального правдоподобия, пользовательский терминал может сначала определить принимаемую мощность для каждой используемой поднесущей в каждом символьном периоде, например, как показано в Уравнении (3), (4) или (5). Для каждой возможной конфигурации х маяка пользовательский терминал может суммировать принимаемую мощность используемых поднесущих, соответствующих поднесущим маяка для этой конфигурации маяка, следующим образом:
 Уравнение (12),
Уравнение (12),
где  - принимаемая мощность используемой поднесущей k в радиокадре t,
- принимаемая мощность используемой поднесущей k в радиокадре t,
 - коэффициент масштабирования для используемой поднесущей k в радиокадре t,
- коэффициент масштабирования для используемой поднесущей k в радиокадре t,
Х - функция, которая идентифицирует поднесущие маяка для конфигурации х маяка, и
 - суммарная принимаемая мощность для конфигурации х маяка.
- суммарная принимаемая мощность для конфигурации х маяка.
Пользовательский терминал может суммировать принимаемую мощность используемых поднесущих в достаточном числе радиокадров. Пользовательский терминал может масштабировать принимаемую мощность Pk,t с использованием коэффициента βk,t масштабирования, который может зависеть от средней мощности и/или других параметров. Коэффициент βk,t масштабирования может также быть исключен, если задать его равным 1.
Пользовательский терминал может получить Р суммарных принимаемых мощностей для Р возможных конфигураций маяка. Пользовательский терминал может сравнить суммарную принимаемую мощность для каждой возможной конфигурации маяка с пороговым значением TML и может признать конфигурацию маяка обнаруженной, если суммарная принимаемая мощность превышает пороговое значение, следующим образом:
Если Px>TML, то признать,
что конфигурация маяка/сота х
обнаружена Уравнение (13)
Уравнение (13)
Пороговое значение TML может выбираться таким образом, чтобы обеспечить расчетную вероятность обнаружения, расчетную вероятность ложного срабатывания и т.д. Более низкое значение TML может увеличить вероятность обнаружения сот, но может также увеличить и вероятность ошибочного признания сот, которых в действительности не существует.
Описанное выше декодирование методом максимального правдоподобия может выполняться для каждого символьного периода, в котором обнаружены поднесущие с сильным сигналом. В Уравнении (12) суммируется принимаемая мощность Pk,t для конкретного символьного периода n в разных радиокадрах. Суммирование в Уравнении (12) и сравнение с пороговым значением в Уравнении (13) могут быть повторены для каждого дополнительного символьного периода (например, n+1, n+2 и т.д.), чтобы обнаружить конфигурации маяка с разными временными характеристиками символов.
Для данного символьного периода на основе Уравнения (13) может быть обнаружено более одной конфигурации маяка. В этом случае несколько сот, а не одна, может быть признано обнаруженными на основе обнаруженных конфигураций маяка. В ином случае может быть идентифицирована обнаруженная конфигурация маяка с наибольшей суммарной принимаемой мощностью, и только сота, связанная с этой конфигурацией маяка, может быть признана обнаруженной.
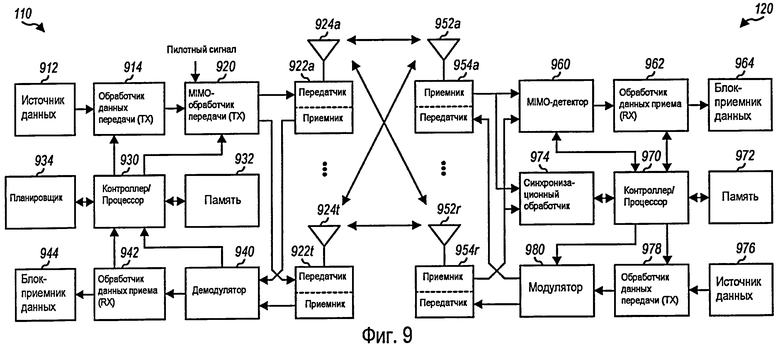
На Фиг.9 показана структурная схема одного из вариантов Узла В 110 и пользовательского терминала 120, которые представляют собой соответственно один Узел В и один пользовательский терминал из показанных на Фиг.1. В Узле В 110 обработчик 914 данных передачи (ТХ) может принимать от источника 912 данных данные трафика для одного или более пользовательских терминалов. Обработчик 914 данных передачи может обрабатывать (например, форматировать, кодировать и выполнять перемежение) данные трафика для каждого пользовательского терминала на основе одной или более схем кодирования, выбранных для этого пользовательского терминала, чтобы получить кодированные данные. Обработчик 914 данных передачи затем может модулировать (или выполнять отображение символов) кодированные данные для каждого пользовательского терминала на основе одной или более схем модуляции (например, BPSK (Binary Phase Shift Keying - Двухпозиционная фазовая манипуляция), QPSK (Quaternary Phase Shift Keying - Квадратурная фазовая манипуляция), PSK (Phase Shift Keying - Фазовая манипуляция) или QAM (Quadrature Amplitude Modulation - Квадратурная амплитудная модуляция), выбранных для этого пользовательского терминала, чтобы получить символы модуляции.
MIMO-обработчик 920 передачи (Multiple Input/Multiple Output - Многоканальный ввод/многоканальный вывод) может мультиплексировать символы модуляции для всех пользовательских терминалов с символами пилотного сигнала, используя любую схему мультиплексирования. MIMO-обработчик 920 передачи может обрабатывать (например, предварительно кодировать) мультиплексированные символы модуляции и символы пилотного сигнала и предоставлять Т выходных символьных потоков Т передатчикам (TMTR, transmitter) c 922а по 922t. Каждый передатчик 922 может обрабатывать соответствующий выходной символьный поток (например, в случае OFDM), чтобы получить выходной поток элементарных символов. Каждый передатчик 922 может дополнительно обрабатывать (например, преобразовывать в аналоговую форму, усиливать, фильтровать и преобразовывать с повышением частоты) выходной поток элементарных символов, чтобы получить сигнал нисходящего канала. Т сигналов нисходящего канала от передатчиков 922а-922t могут быть переданы соответственно через Т антенн с 924а по 924t.
В пользовательском терминале 120 антенны 952а-952r могут принимать сигналы нисходящего канала от Узла В 110 и направлять принятые сигналы в приемники (RCVR, receiver) с 954а по 954r соответственно. Каждый приемник 954 может приводить соответствующий принятый сигнал в определенное состояние (например, фильтровать, усиливать, преобразовывать с понижением частоты и оцифровывать), чтобы получить экземпляры, и может затем их дополнительно обрабатывать (например, в случае OFDM), чтобы получить принятые символы. MIMO-детектор 960 может получать принятые символы от всех R приемников с 954а по 954r. MIMO-детектор 960 может обрабатывать принятые символы, используя методику обработки MIMO-приемников, чтобы получить обнаруженные символы, которые представляют собой в первом приближении символы модуляции, переданные Узлом В 110. Обработчик 962 данных приема (RX) может затем обработать (например, демодулировать, выполнить операцию, обратную перемежению, и декодировать) обнаруженные символы и направить декодированные данные, предназначенные пользовательскому терминалу 120, в блок-приемник 964 данных.
Что касается восходящего канала, то в пользовательском терминале 120 данные трафика, поступившие от источника 976 данных, и служебные сигналы могут быть обработаны обработчиком 978 данных передачи (TX), дополнительно обработаны модулятором 980, приведены в определенное состояние передатчиками 954а - 954r и переданы Узлу В 110. В Узле В 110 сигналы восходящего канала, поступившие от пользовательского терминала 120, могут быть приняты антеннами 924, приведены в определенное состояние приемниками 922, демодулированы демодулятором 940 и обработаны обработчиком 942 данных приема (RX), чтобы получить данные трафика и служебные сигналы, переданные пользовательским терминалом 120.
Контроллеры/процессоры 930 и 970 могут управлять работой в Узле В 110 и пользовательском терминале 120 соответственно. Блоки 932 и 972 памяти могут хранить данные и программный код для Узла В 110 и пользовательского терминала 120 соответственно. Синхронизационный (Sync) обработчик 974 может выполнять обнаружение маяка и предоставлять идентификаторы сот, а также другую информацию для обнаруженных сот. Планировщик 934 может определять пользовательские терминалы для передачи по нисходящему и/или восходящему каналу.
На Фиг.10 показана структурная схема одного из вариантов генератора 1000 сигнала маяка, который включает генератор 1010 символов маяка и OFDM-модулятор 1030. Генератор 1010 может быть частью обработчика 914 данных передачи в Узле В 110, а OFDM-модулятор 1030 может быть частью каждого из передатчиков 922.
В генераторе 1010 символов маяка блок 1012 может принимать установочные параметры мощности маяка для соты и может определять коэффициент Gb усиления для сигнала маяка. Блок 1014 может принимать идентификатор соты и/или другую информацию и определять конфигурацию маяка на основе принятой информации. Для каждого символа маяка блок 1016 может определять поднесущую маяка на основе конфигурации маяка. Для каждого символа маяка блок 1018 масштабирования может масштабировать ненулевой символ (который имеет ненулевую величину сигнала) на основе коэффициента Gb усиления. Блок 1020 отображения может отображать масштабированный ненулевой символ на поднесущую маяка, а также может отображать нулевые символы (с величиной сигнала, равной нулю) на оставшиеся поднесущие в полосе частот маяка. Мультиплексор (Mux) 1022 может мультиплексировать символы, поступившие от генератора 1010 с другими символами, которые должны быть переданы.
В OFDM-модуляторе 1030 блок 1032 обратного DFT-преобразования (IDFT) может выполнять IDFT-преобразование для К символов, поступивших от мультиплексора 1022, для каждого символьного периода маяка и предоставлять К экземпляров во временной области. Блок 1034 вставки циклического префикса может добавлять циклический префикс к К экземплярам во временной области и предоставлять символ маяка.
На Фиг.11 показана структурная схема одного из вариантов обработчика 1100 маяка, который включает OFDM-демодулятор 1110 и детектор 1120 маяка. OFDM-демодулятор 1110 может быть частью каждого из приемников 954 в пользовательском терминале 120, а детектор 1120 маяка может быть частью синхронизационного обработчика 974.
В OFDM-демодуляторе 1110 блок 1112 удаления циклического префикса может удалять циклический префикс в каждом принятом OFDM-символе и предоставлять К принятых экземпляров. Блок 1114 DFT-преобразования может выполнять DFT-преобразование для К принятых символов и предоставлять К принятых символов. Блоки 1112 и 1114 могут выполнять неперекрывающиеся DFT-преобразования (например, как показано на Фиг.6) или перекрывающиеся DFT-преобразования (например, как показано на Фиг.7).
В детекторе 1120 маяка блок 1122 может вычислять принимаемую мощность каждой используемой поднесущей, например, как показано в Уравнении (3), (4) или (5). Детектор 1120 может выполнять обнаружение маяков с использованием жесткого декодирования и/или декодирования методом максимального правдоподобия. При жестком декодировании блок 1124 может определить поднесущие-кандидаты на основе принимаемой мощности используемых поднесущих, например, как показано в Уравнении (6). Детектор 1126 конфигурации маяка может затем выполнить обнаружение сот на основе поднесущих-кандидатов и конфигураций маяка для всех возможных идентификаторов сот. При декодировании методом максимального правдоподобия блок 1128 может просуммировать принимаемую мощность поднесущих маяка для каждой возможной конфигурации маяка, например, как показано в Уравнении (12). Детектор 1126 затем может выполнить обнаружение сот на основе суммарной принимаемой мощности для каждой возможной конфигурации маяка, например, как показано в Уравнении (13).
На Фиг.12 показан один из вариантов способа 1200 обработки сигнала маяка в системе беспроводной связи. Может быть определена конфигурация маяка для соты, причем конфигурация маяка идентифицирует множество поднесущих, которые должны использоваться для сигнала маяка во множестве символьных периодов, и каждая из упомянутого множества поднесущих относится к своей, отличающейся группе из множества ортогональных групп поднесущих (этап 1212). Например, конфигурация маяка может идентифицировать первую поднесущую в первой группе, вторую поднесущую во второй группе, третью поднесущую в третьей группе и т.д. Множество групп поднесущих может соответствовать разным неперекрывающимся поднаборам из всех поднесущих, используемых для маяка. Каждая из G групп поднесущих может включать S поднесущих, и на основе G групп по S поднесущих может быть задано Р конфигураций маяка, где P=SG.
На основе конфигурации маяка может быть выполнена обработка для сигнала маяка (этап 1214). Способ 1200 может выполняться Узлом В или передатчиком. В этом случае на этапе 1214 первый символ маяка может быть сгенерирован на основе первой поднесущей первой группы и послан в первом символьном периоде. Второй символ маяка может быть сгенерирован на основе второй поднесущей второй группы и послан во втором символьном периоде. Третий символ маяка может быть сгенерирован на основе третьей поднесущей третьей группы и послан в третьем символьном периоде.
Способ 1200 может также выполняться пользовательским терминалом или приемником. В этом случае на этапе 1214 может быть определена принимаемая мощность поднесущих, используемых для маяка. После чего сота может быть обнаружена на основе принимаемой мощности используемых поднесущих и конфигурации маяка. При жестком декодировании поднесущие-кандидаты могут быть определены на основе принимаемой мощности используемых поднесущих, а сота может быть обнаружена на основе поднесущих-кандидатов и конфигурации маяка. При декодировании методом максимального правдоподобия принимаемая мощность поднесущих, определенная на основе конфигурации маяка, может быть просуммирована, и сота может быть обнаружена на основе суммарной принимаемой мощности.
На Фиг.13 показан один из вариантов устройства 1300 для обработки сигнала маяка. Устройство 1300 включает средство определения конфигурации маяка для соты, причем конфигурация маяка идентифицирует множество поднесущих, которые должны использоваться для сигнала маяка во множестве символьных периодов, и каждая из упомянутого множества несущих относится к своей, отличающейся группе из множества ортогональных групп поднесущих (модуль 1312), и средство выполнения обработки сигнала маяка на основе конфигурации маяка (модуль 1314).
На Фиг.14 показан один из вариантов способа 1400 передачи маяка в системе беспроводной связи. Может быть определен уровень мощности передачи для сигнала маяка от соты, причем уровень мощности передачи для соты является регулируемым, и он может отличаться от уровней мощности передачи для сигналов маяка от соседних сот (этап 1412). Уровень мощности передачи может быть определен на основе расчетной вероятности обнаружения, расчетной вероятности ложного срабатывания и/или других параметров. Может быть сгенерирован сигнал маяка для передачи на определенном таким образом уровне мощности передачи (этап 1414). На этапе 1414 может быть сгенерирован символ маяка для каждого символьного периода, в котором передают символ маяка. Символ маяка может содержать ненулевой символ для одной поднесущей и нулевые символы для оставшихся поднесущих, причем ненулевой символ передают на упомянутом определенном уровне мощности передачи.
На Фиг.15 показан один из вариантов устройства 1500 для передачи маяка в системе беспроводной связи. Устройство 1500 включает средство определения уровня мощности передачи для сигнала маяка от соты, причем уровень мощности передачи для соты является регулируемым, и он может отличаться от уровней мощности передачи для сигналов маяка от соседних сот (модуль 1512), и средство генерации сигнала маяка для передачи на определенном таким образом уровне мощности передачи (модуль 1514).
На Фиг.16 показан один из вариантов способа 1600 обнаружения маяка пользовательским терминалом или приемником. Могут быть выполнены первые DFT-преобразования на основе временных характеристик первого символа, чтобы получить первые принятые символы для множества поднесущих (этап 1612). Могут быть выполнены вторые DFT-преобразования на основе временных характеристик второго символа, чтобы получить вторые принятые символы для множества поднесущих (этап 1614). Временные характеристики второго символа могут быть смещены относительно временных характеристик первого символа на заранее определенную часть или регулируемую часть символьного периода. Может быть определена принимаемая мощность множества поднесущих на основе первых и вторых принятых символов (этап 1616). На основе принимаемой мощности множества поднесущих могут быть обнаружены сигналы маяка от сот (этап 1618).
На этапе 1616 может быть определена принимаемая мощность первых принятых символов от каждого из первых DFT-преобразований, а также может быть определена принимаемая мощность вторых принятых символов от каждого из вторых DFT-преобразований. Принимаемая мощность для множества поднесущих может быть определена путем суммирования (или выбора наибольшей из них) принимаемой мощности первых принятых символов и принимаемой мощности вторых принятых символов от перекрывающихся первых и вторых DFT-преобразований. На этапе 1618 может быть выполнено жесткое декодирование или декодирование методом максимального правдоподобия. При жестком декодировании поднесущие-кандидаты могут быть определены на основе принимаемой мощности множества поднесущих, а сигналы маяка могут быть обнаружены на основе поднесущих-кандидатов и конфигураций маяка для сот. При декодировании методом максимального правдоподобия принимаемая мощность поднесущих для каждой возможной конфигурации маяка может быть просуммирована, а соты могут быть обнаружены на основе суммарной принимаемой мощности для каждой из множества конфигураций маяка. Конфигурации маяка для сот могут быть определены на основе ортогональных групп поднесущих или на основе, по меньшей мере, одного из следующего: кода маяка, кода Рида-Соломона, MDS-кода и кода без запятой.
Чтобы уменьшить число DFT-преобразований, на основе результатов первых DFT-преобразований можно определить, необходимо ли выполнять вторые DFT-преобразования. Вторые DFT-преобразования могут быть выполнены для символьных периодов, в которых вероятно наличие поднесущих с сильным сигналом, в ином случае их выполнение можно пропустить.
На Фиг.17 показан один из вариантов устройства 1700 для обнаружения маяка. Устройство 1700 включает средство выполнения первых DFT-преобразований на основе временных характеристик первого символа с целью получения первых принятых символов для множества поднесущих (модуль 1712), средство выполнения вторых DFT-преобразований на основе временных характеристик второго символа с целью получения вторых принятых символов для множества поднесущих (модуль 1714), средство определения принимаемой мощности множества поднесущих на основе первых и вторых принятых символов (модуль 1716) и средство обнаружения сигналов маяка от сот на основе принимаемой мощности множества поднесущих (модуль 1718).
На Фиг.18 показан один из вариантов способа 1800 обнаружения маяка с использованием декодирования методом максимального правдоподобия. Может быть определена принимаемая мощность множества поднесущих, используемых для сигналов маяка (этап 1812). Может быть просуммирована принимаемая мощность поднесущих для каждой из множества конфигураций маяка (этап 1814). На основе суммарной принимаемой мощности для каждой из множества конфигураций маяка может быть выполнено обнаружение сот (этап 1816).
На этапе 1812, чтобы получить первые принятые символы для множества поднесущих, на основе временных характеристик первого символа могут быть выполнены первые DFT-преобразования. На основе первых принятых символов может быть определена принимаемая мощность множества поднесущих, например, как показано в Уравнении (3). Кроме того, чтобы получить вторые принятые символы для множества поднесущих, на основе временных характеристик второго символа могут быть выполнены вторые DFT-преобразования. После чего принимаемая мощность множества поднесущих может быть дополнительно определена на основе вторых принятых символов, например, как показано в Уравнении (4) или (5).
На этапе 1816 можно сравнить суммарную принимаемую мощность для каждой конфигурации маяка с пороговым значением. Сота может быть признана обнаруженной для каждой конфигурации маяка с суммарной принимаемой мощностью, превышающей пороговое значение. В качестве альтернативы можно определить из всех конфигураций маяка конфигурацию с наибольшей суммарной принимаемой мощностью. Тогда сота может быть признана обнаруженной, если наибольшая суммарная принимаемая мощность превышает пороговое значение.
На Фиг.19 показан один из вариантов устройства 1900 для обнаружения маяка. Устройство 1900 включает средство определения принимаемой мощности множества поднесущих, используемых для сигналов маяка (модуль 1912), средство суммирования принимаемой мощности поднесущих для каждой из множества конфигураций маяка (модуль 1914) и средство обнаружения сот на основе суммарной принимаемой мощности для каждой из множества конфигураций маяка (модуль 1916).
Модули, показанные на Фиг.13, 15, 17 и 19, могут содержать процессоры, электронные устройства, аппаратные средства, электронные компоненты, логические схемы, память и т.д. либо любую их комбинацию.
Специалистам в данной области техники будет понятно, что информация и сигналы могут быть представлены с использованием любой из множества различных технологий или методик. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементарные сигналы, упоминание которых может встретиться в приведенном выше описании, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами либо любой их комбинацией.
Специалистам в данной области техники, кроме того, будет очевидно, что различные приведенные в качестве иллюстрации логические блоки, модули, схемы и этапы алгоритмов, описанные при раскрытии сущности настоящего изобретения, могут быть реализованы как электронные аппаратные средства, компьютерное программное обеспечение или их комбинация. Чтобы понятным образом проиллюстрировать эту взаимозаменяемость аппаратных средств и программного обеспечения, различные компоненты, приведенные в качестве иллюстрации, блоки, модули, схемы и этапы описаны выше в основном с точки зрения их функционального назначения. Реализовано ли такое функциональное назначение аппаратно или программно, зависит от конкретного варианта применения и конструктивных ограничений, наложенных на систему в общем. Квалифицированные специалисты могут реализовать на практике описанное функциональное назначение многими путями в каждом конкретном варианте применения, но такие решения по реализации не должны восприниматься как выходящие за пределы объема настоящего изобретения.
Различные приведенные в качестве иллюстрации логические блоки, модули и схемы, рассмотренные здесь при раскрытии сущности настоящего изобретения, могут быть реализованы или выполнены с использованием процессора общего назначения, процессора цифровой обработки сигнала (DSP), специализированной интегральной микросхемы (ASIC), вентильной матрицы с эксплуатационным программированием (FPGA) или другого программируемого логического устройства, логического элемента на дискретных компонентах или транзисторных логических схем, дискретных аппаратных компонентов либо любой их комбинации, предназначенной для выполнения описанных здесь функций. Процессор общего назначения может представлять собой микропроцессор, но в альтернативном варианте он может представлять собой любой традиционный процессор, контроллер, микроконтроллер или конечный автомат. Процессор может также быть реализован в виде комбинации вычислительных устройств, например, комбинации из процессора цифровой обработки сигнала и микропроцессора, множества микропроцессоров, одного или более микропроцессоров совместно с ядром в виде процессора цифровой обработки сигнала или любой другой подобной конфигурации.
Этапы способа или алгоритма, описанные здесь при раскрытии сущности настоящего изобретения, могут быть реализованы непосредственно в аппаратных средствах, в программном модуле, исполняемом процессором, либо их комбинации. Программный модуль может находиться в ОЗУ (RAM, Random Access Memory - Оперативное запоминающее устройство), флэш-памяти, ПЗУ (ROM, Read-Only Memory - Постоянное запоминающее устройство), СППЗУ (EPROM, Erasable Programmable ROM - Стираемое программируемое ПЗУ), ЭСППЗУ (EEPROM, Electrically Erasable Programmable ROM - Электрически стираемое программируемое ПЗУ), регистрах, на жестком диске, съемном диске, диске CD-ROM (Compact Disk - Read-Only Memory - ПЗУ на компакт-диске) или носителе информации любого другого типа, известном в данной области техники. Примерный носитель информации соединен с процессором таким образом, чтобы процессор мог считывать информацию с этого носителя и записывать информацию на него. В альтернативном варианте носитель информации может быть составной частью процессора. Процессор и носитель информации могут находиться в специализированной интегральной микросхеме (ASIC). Эта схема может находиться в пользовательском терминале. В альтернативном варианте процессор и носитель информации могут находиться в пользовательском терминале в виде отдельных компонентов.
В одном или более примерных вариантах реализации настоящего изобретения описанные здесь функции могут быть реализованы в аппаратных средствах, программном обеспечении, микропрограммах или их комбинации. В случае реализации в виде программного обеспечения функции могут храниться или могут передаваться в виде одной или более инструкций или программного кода на машиночитаемом носителе. Машиночитаемые носители включают в себя как компьютерные носители информации, так и среды передачи данных, включающие любую среду, которая облегчает перемещение компьютерной программы из одного места в другое. Носители информации могут представлять собой любые имеющиеся носители, доступ к которым может осуществлять компьютер общего назначения или специализированный компьютер. В качестве примера, не подразумевающего ограничение, такие машиночитаемые носители могут содержать ОЗУ, ПЗУ, ЭСППЗУ, диск CD-ROM или другое запоминающее устройство на оптическом диске, запоминающее устройство на магнитном диске или другие магнитные запоминающие устройства либо любой другой носитель, который может быть использован для переноса или хранения необходимых программных средств в виде инструкций или структур данных и доступ к которым может осуществлять компьютер общего назначения или специализированный компьютер либо процессор общего назначения или специализированный процессор. Кроме того, машиночитаемым носителем, в сущности, можно назвать любое соединение. Например, если программное обеспечение передается с веб-сайта, сервера или из другого удаленного источника с использованием коаксиального кабеля, волоконно-оптического кабеля, витой пары, цифровой абонентской линии (DSL) или беспроводных технологий, например, на основе инфракрасного, радио- или микроволнового излучения, то коаксиальный кабель, волоконно-оптический кабель, витая пара, цифровая абонентская линия (DSL) или беспроводные технологии, например, на основе инфракрасного, радио- или микроволнового излучения также включаются в понятие носителя. Термин "диск" (на английском в разном написании "disk" и "disc"), в том виде, как он здесь используется, включает компакт-диск (CD), лазерный диск, оптический диск, цифровой универсальный диск (DVD), флоппи-диск и blue-ray диск, где термин "диск" в первом написании (disk) относится к дискам, которые обычно воспроизводят данные на основе магнитных свойств, в то время как термин "диск" во втором написании (disc) относится к дискам, которые воспроизводят данные на основе оптических свойств при помощи лазеров. Комбинации указанного выше также должны быть включены в объем понятия машиночитаемого носителя.
Ранее приведенное описание настоящего изобретения представлено с целью позволить любому специалисту в данной области техники реализовать или применить его на практике. Специалистам в данной области техники будут очевидны различные модификации настоящего изобретения и основные принципы этого изобретения, которые здесь определены, можно применить к другим вариантам данного изобретения, которые не будут выходить за пределы его сущности или объема. Таким образом, предполагается, что раскрытие настоящего изобретения не ограничивается описанными здесь примерами и вариантами, но должно иметь наиболее широкий объем, соответствующий рассмотренным здесь принципам и новым признакам.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2017 |
|
RU2746019C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2017 |
|
RU2740073C1 |
| ТЕРМИНАЛ, СПОСОБ РАДИОСВЯЗИ, БАЗОВАЯ СТАНЦИЯ И СИСТЕМА | 2021 |
|
RU2780812C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2019 |
|
RU2786420C1 |
| ЧЕРЕДОВАНИЕ КАНАЛОВ УПРАВЛЕНИЯ OFDMA | 2006 |
|
RU2390974C2 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2019 |
|
RU2782254C1 |
| СИГНАЛИЗАЦИЯ КАНАЛА УПРАВЛЕНИЯ НИСХОДЯЩЕЙ ЛИНИИ СВЯЗИ В СИСТЕМАХ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2567215C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА СОТЫ В ОРТОГОНАЛЬНОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2011 |
|
RU2454797C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2019 |
|
RU2789180C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2019 |
|
RU2784368C1 |
Изобретение относится к связи. Описаны методики передачи сигналов маяка, призванные помочь пользовательским терминалам (UE) в выполнении поиска сот, а также методики обнаружения сигналов маяка. Согласно одному из аспектов сотам могут быть присвоены конфигурации маяка, которые задают на основе ортогональной группировки поднесущих. U поднесущих, используемых для маяка, можно организовать в G ортогональных групп, каждая из которых включает S поднесущих. На основе G групп по S поднесущих могут быть заданы различные конфигурации маяка. Согласно другому аспекту соты могут передавать свои сигналы маяка на регулируемых уровнях мощности передачи, которые могут быть определены на основе расчетной эффективности обнаружения маяка. Согласно следующему аспекту пользовательский терминал может выполнять перекрывающиеся дискретные преобразования Фурье (DFT-преобразования), чтобы "захватить" больше принимаемой мощности, когда временные характеристики символов в пользовательском терминале не совпадают с временными характеристиками символов обнаруживаемых сот. Согласно еще одному аспекту пользовательский терминал может выполнять обнаружение маяков с использованием декодирования методом максимального правдоподобия. Техническим результатом является быстрый и эффективный поиск сот пользовательским терминалом. 12 н. и 34 з.п. ф-лы, 19 ил.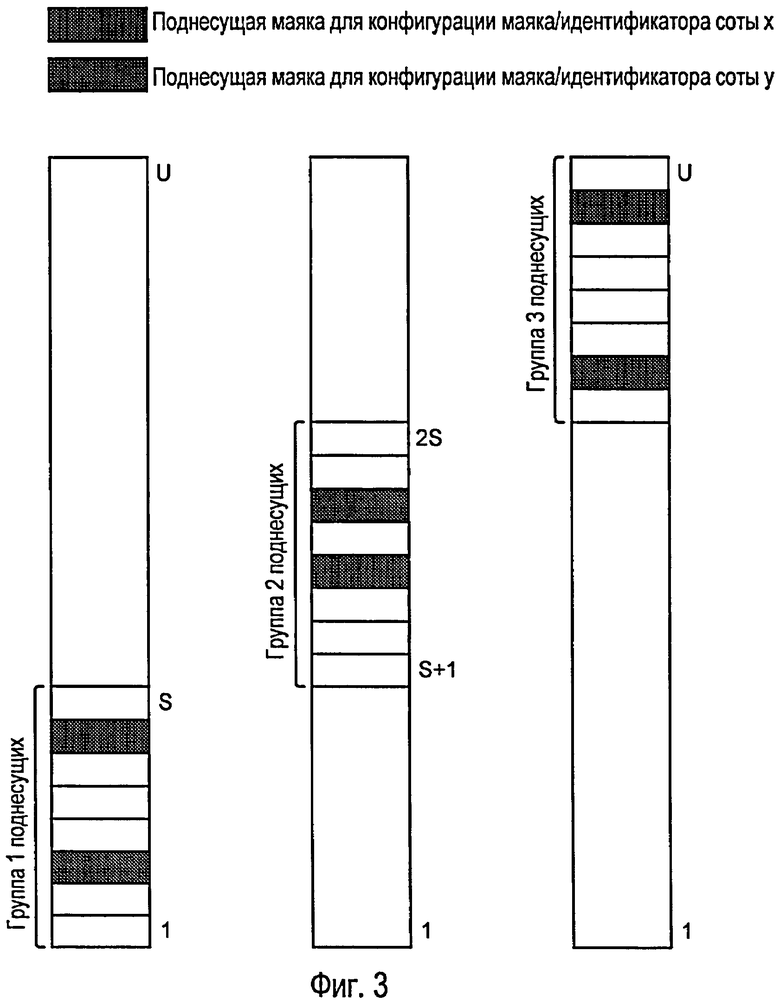
1. Устройство для беспроводной связи, содержащее:
по меньшей мере, один процессор, выполненный с возможностью определять конфигурацию маяка для соты на основе кода маяка для определения множества поднесущих, которые необходимо использовать для сигнала маяка и осуществлять обработку сигнала маяка на основе конфигурации маяка, причем конфигурация маяка идентифицирует множество поднесущих, которые необходимо использовать для сигнала маяка во множестве символьных периодов, и каждая из множества поднесущих относится к своей отличающейся группе из множества ортогональных групп поднесущих; и
память, соединенную с упомянутым, по меньшей мере, одним процессором.
2. Устройство по п.1, в котором конфигурация маяка идентифицирует первую поднесущую в первой группе и вторую поднесущую во второй группе, и в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью генерировать первый символ маяка на основе первой поднесущей в первой группе, генерировать второй символ маяка на основе второй поднесущей во второй группе, посылать первый символ маяка в первом символьном периоде и посылать второй символ маяка во втором символьном периоде.
3. Устройство по п.2, в котором конфигурация маяка дополнительно идентифицирует третью поднесущую в третьей группе и в котором упомянутый, по меньшей мере, один процессор дополнительно выполнен с возможностью генерировать третий символ маяка на основе третьей поднесущей в третьей группе и посылать третий символ маяка в третьем символьном периоде.
4. Устройство по п.1, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью определять принимаемую мощность поднесущих, используемых для маяка, и обнаруживать соту на основе принимаемой мощности поднесущих, используемых для маяка, и конфигурации маяка.
5. Устройство по п.4, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью определять поднесущие-кандидаты на основе принимаемой мощности поднесущих, используемых для маяка, и обнаруживать соту на основе поднесущих-кандидатов и конфигурации маяка.
6. Устройство по п.4, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью суммировать принимаемую мощность поднесущих, идентифицированных конфигурацией маяка, и обнаруживать соту на основе суммарной принимаемой мощности.
7. Устройство по п.1, в котором множество ортогональных групп поднесущих соответствует разным неперекрывающимся поднаборам из всех поднесущих, используемых для маяка.
8. Устройство по п.1, в котором каждая из множества (G) ортогональных групп поднесущих включает множество (S) поднесущих, и в котором на основе G ортогональных групп по S поднесущих задают множество (Р) конфигураций маяка, где Р равно S, возведенному в степень G.
9. Устройство по п.1, в котором конфигурация маяка идентифицирует три поднесущих, которые необходимо использовать для сигнала маяка в трех символьных периодах, причем каждая из этих трех поднесущих относится к своей отличающейся группе из трех ортогональных групп поднесущих.
10. Способ беспроводной связи, содержащий следующие этапы, на которых
определяют конфигурацию маяка для соты на основе кода маяка для определения множества поднесущих, которые необходимо использовать для сигнала маяка, причем конфигурация маяка идентифицирует множество поднесущих, которые необходимо использовать для сигнала маяка во множестве символьных периодов, и каждая из множества поднесущих относится к своей отличающейся группе из множества ортогональных групп поднесущих; и
выполняют обработку сигнала маяка на основе конфигурации маяка.
11. Способ по п.10, в котором конфигурация маяка идентифицирует первую поднесущую в первой группе и вторую поднесущую во второй группе, и в котором этап выполнения обработки сигнала маяка содержит следующие этапы, на которых
генерируют первый символ маяка на основе первой поднесущей в первой группе,
генерируют второй символ маяка на основе второй поднесущей во второй группе,
посылают первый символ маяка в первом символьном периоде, и посылают второй символ маяка во втором символьном периоде.
12. Способ по п.10, в котором этап выполнения обработки сигнала маяка содержит этапы, на которых
определяют принимаемую мощность поднесущих, исдользуемых для маяка, и
выполняют обнаружение соты на основе принимаемой мощности поднесущих, используемых для маяка, и конфигурации маяка.
13. Устройство для беспроводной связи, содержащее
средство определения конфигурации маяка для соты на основе кода маяка для определения множества поднесущих, которые необходимо использовать для сигнала маяка, причем конфигурация маяка идентифицирует множество поднесущих, которые необходимо использовать для сигнала маяка во множестве символьных периодов, и каждая из множества поднесущих относится к своей отличающейся группе из множества ортогональных групп поднесущих; и
средство выполнения обработки сигнала маяка на основе конфигурации маяка.
14. Устройство по п.13, в котором конфигурация маяка идентифицирует первую поднесущую в первой группе и вторую поднесущую во второй группе, и в котором средство выполнения обработки сигнала маяка содержит
средство генерации первого символа маяка на основе первой поднесущей в первой группе,
средство генерации второго символа маяка на основе второй поднесущей во второй группе,
средство посылки первого символа маяка в первом символьном периоде, и
средство посылки второго символа маяка во втором символьном периоде.
15. Устройство по п.13, в котором средство выполнения обработки сигнала маяка содержит
средство определения принимаемой мощности поднесущих, используемых для маяка, и
средство обнаружения соты на основе принимаемой мощности поднесущих, используемых для маяка, и конфигурации маяка.
16. Машиночитаемый носитель, содержащий инструкции, которые при их исполнении машиной вызывают выполнение этой машиной операций, в ходе которых
определяют конфигурацию маяка для соты на основе кода маяка для определения множества поднесущих, которые необходимо использовать для сигнала маяка, причем конфигурация маяка идентифицирует множество поднесущих, которые необходимо использовать для сигнала маяка во множестве символьных периодов, и каждая из множества поднесущих относится к своей отличающейся группе из множества ортогональных групп поднесущих; и
выполняют обработку сигнала маяка на основе конфигурации маяка.
17. Устройство для беспроводной связи, содержащее
по меньшей мере, один процессор, выполненный с возможностью определять уровень мощности передачи для сигнала маяка от соты, и генерировать сигнал маяка для передачи на определенном уровне мощности передачи на основе кода маяка для определения множества поднесущих, которые необходимо использовать для сигнала маяка, причем уровень мощности передачи является регулируемым для соты и может отличаться от уровней мощности передачи для сигналов маяка от соседних сот; и
память, соединенную с упомянутым, по меньшей мере, одним процессором.
18. Устройство по п.17, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью генерировать символ маяка для каждого символьного периода, в котором передают сигнал маяка, причем символ маяка содержит ненулевой символ для одной поднесущей из множества поднесущих и нулевые символы для оставшихся поднесущих из множества поднесущих, и ненулевой символ передают на упомянутом определенном уровне мощности передачи.
19. Устройство по п.17, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью определять уровень мощности передачи на основе расчетной вероятности обнаружения и расчетной вероятности ложного срабатывания для сигнала маяка.
20. Способ беспроводной связи, содержащий следующие этапы, на которых определяют уровень мощности передачи для сигнала маяка от соты, причем уровень мощности передачи является регулируемым для соты и может отличаться от уровней мощности передачи для сигналов маяка от соседних сот; и
генерируют сигнал маяка для передачи на определенном уровне мощности передачи на основе кода маяка для определения множества поднесущих, которые необходимо использовать для сигнала маяка.
21. Способ по п.20, в котором этап генерации сигнала маяка содержит генерацию символа маяка для каждого символьного периода, в котором передают сигнал маяка, причем символ маяка содержит ненулевой символ для одной поднесущей из множества поднесущих и нулевые символы для оставшихся поднесущих из множества поднесущих, причем ненулевой символ передают на упомянутом определенном уровне мощности передачи.
22. Устройство для беспроводной связи, содержащее
по меньшей мере, один процессор, выполненный с возможностью выполнять первые дискретные преобразования Фурье (DFT-преобразования) на основе временных характеристик первого символа, чтобы получить первые принятые символы для множества поднесущих, выполнять вторые DFT-преобразования, которые перекрываются с первыми DFT-преобразованиями, на основе временных характеристик второго символа, чтобы получить вторые принятые символы для множества поднесущих, определять принимаемую мощность множества поднесущих на основе упомянутых первых и вторых принятых символов, и выполнять обнаружение сигналов маяка от сот на основе принимаемой мощности множества поднесущих; и
память, соединенную с упомянутым, по меньшей мере, одним процессором.
23. Устройство по п.22, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью определять принимаемую мощность для первых принятых символов от каждого из упомянутых первых DFT-преобразований, определять принимаемую мощность для вторых принятых символов от каждого из упомянутых вторых DFT-преобразований, и суммировать принимаемую мощность первых и вторых принятых символов от перекрывающихся первых и вторых DFT-преобразований, чтобы получить принимаемую мощность множества поднесущих.
24. Устройство по п.22, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью определять принимаемую мощность для первых принятых символов от каждого из упомянутых первых DFT-преобразований, определять принимаемую мощность для вторых принятых символов от каждого из упомянутых вторых DFT-преобразований и использовать в качестве принимаемой мощности множества поднесущих ту из упомянутых принимаемой мощности первых принятых символов и принимаемой мощности вторых принятых символов от перекрывающихся первых и вторых DFT-преобразований, которая больше.
25. Устройство по п.22, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью определять поднесущие-кандидаты на основе принимаемой мощности множества поднесущих, и выполнять обнаружение сигналов маяка на основе поднесущих-кандидатов и конфигураций маяка для сот.
26. Устройство по п.25, в котором конфигурации маяка для сот задают на основе множества ортогональных групп поднесущих.
27. Устройство по п.25, в котором конфигурации маяка для сот задают на основе, по меньшей мере, одного из следующего: кода маяка, кода Рида-Соломона, кода с максимальной разнесенностью (MDS) и кода без запятой.
28. Устройство по п.22, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью суммировать принимаемую мощность поднесущих для каждой из множества конфигураций маяка и выполнять обнаружение сот на основе суммарной принимаемой мощности для каждой из множества конфигураций маяка.
29. Устройство по п.22, в котором временные характеристики второго символа смещены относительно временных характеристик первого символа на регулируемую часть символьного периода.
30. Устройство по п.22, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью определять, стоит ли выполнять вторые DFT-преобразования, на основе результатов первых DFT-преобразований.
31. Устройство по п.22, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью осуществлять вторые DFT-преобразования для символьных периодов, в которых, по всей вероятности, присутствуют поднесущие с сильным сигналом, и пропускать вторые DFT-преобразования для символьных периодов, в которых, по всей вероятности, поднесущие с сильным сигналом отсутствуют.
32. Способ беспроводной связи, содержащий следующие этапы, на которых
выполняют первые дискретные преобразования Фурье (DFT-преобразования) на основе временных характеристик первого символа, чтобы получить первые принятые символы для множества поднесущих;
выполняют вторые DFT-преобразования, которые перекрываются с первыми DFT-преобразованиями, на основе временных характеристик второго символа, чтобы получить вторые принятые символы для множества поднесущих;
определяют принимаемую мощность множества поднесущих на основе упомянутых первых и вторых принятых символов; и
выполняют обнаружение сигналов маяка от сот на основе принимаемой мощности множества поднесущих.
33. Способ по п.32, в котором этап определения принимаемой мощности множества поднесущих содержит следующие этапы, на которых
определяют принимаемую мощность для первых принятых символов от каждого из упомянутых первых DFT-преобразований;
определяют принимаемую мощность для вторых принятых символов от каждого из упомянутых вторых DFT-преобразований; и
суммируют принимаемую мощность первых и вторых принятых символов от перекрывающихся первых и вторых DFT-преобразований, чтобы получить принимаемую мощность множества поднесущих.
34. Способ по п.32, в котором этап обнаружения сигналов маяка, содержит следующие этапы, на которых
определяют поднесущие-кандидаты на основе принимаемой мощности множества поднесущих; и
выполняют обнаружение сигналов маяка на основе поднесущих-кандидатов и конфигураций маяка для сот.
35. Способ по п.32, в котором этап обнаружения сигналов маяка, содержит этапы, на которых
суммируют принимаемую мощность поднесущих,
идентифицированных каждой из множества конфигураций маяка; и
выполняют обнаружение сот на основе суммарной принимаемой мощности для каждой из множества конфигураций маяка.
36. Устройство для беспроводной связи, содержащее:
средство выполнения первых дискретных преобразований Фурье (DFT-преобразований) на основе временных характеристик первого символа, чтобы получить первые принятые символы для множества поднесущих;
средство выполнения вторых DFT-преобразований, которые перекрываются с первыми DFT- преобразованиями, на основе временных характеристик второго символа, чтобы получить вторые принятые символы для множества поднесущих;
средство определения принимаемой мощности множества поднесущих на основе упомянутых первых и вторых принятых символов; и
средство обнаружения сигналов маяка от сот на основе принимаемой мощности множества поднесущих.
37. Устройство по п.36, в котором средство определения принимаемой мощности множества поднесущих содержит
средство определения принимаемой мощности первых принятых символов от каждого из первых DFT-преобразований;
средство определения принимаемой мощности вторых принятых символов от каждого из вторых DFT-преобразований; и
средство суммирования принимаемой мощности первых и вторых принятых символов от перекрывающихся первых и вторых DFT-преобразований, чтобы получить принимаемую мощность множества поднесущих.
38. Устройство по п.36, в котором средство обнаружения сигналов маяка содержит
средство определения поднесущих-кандидатов на основе принимаемой мощности множества поднесущих, и
средство обнаружения сигналов маяка на основе поднесущих-кандидатов и конфигураций маяка для сот.
39. Устройство по п.36, в котором средство обнаружения сигналов маяка содержит
средство суммирования принимаемой мощности для поднесущих, идентифицированных каждой из множества конфигураций маяка, и
средство обнаружения сот на основе суммарной принимаемой мощности для каждой из множества конфигураций маяка.
40. Машиночитаемый носитель, содержащий инструкции, которые при их исполнении машиной вызывают выполнение этой машиной операций, в ходе которых
выполняют первые дискретные преобразования Фурье (DFT-преобразования) на основе временных характеристик первого символа, чтобы получить первые принятые символы для множества поднесущих;
выполняют вторые DFT-преобразования, которые пересекаются с первыми DFT-преобразованиями на основе временных характеристик второго символа, чтобы получить вторые принятые символы для множества поднесущих;
определяют принимаемую мощность множества поднесущих на основе упомянутых первых и вторых принятых символов; и
выполняют обнаружение сигналов маяка от сот на основе принимаемой мощности множества поднесущих.
41. Устройство для беспроводной связи, содержащее, по меньшей мере, один процессор, выполненный с возможностью определять принимаемую мощность множества поднесущих, используемых для сигналов маяка, суммировать принимаемую мощность поднесущих для каждой из множества конфигураций маяка и выполнять обнаружение сот на основе суммарной принимаемой мощности для каждой из множества конфигураций маяка; и
память, соединенную с упомянутым, по меньшей мере, одним процессором,
причем упомянутый, по меньшей мере, один процессор выполнен с возможностью осуществлять первые дискретные преобразования Фурье (DFT-преобразования) на основе временных характеристик первого символа, чтобы получить первые принятые символы для множества поднесущих, осуществлять вторые DFT-преобразования, которые перекрываются с первыми DFT-преобразованиями, на основе временных характеристик второго символа, чтобы получить вторые принятые символы для множества поднесущих, и определять принимаемую мощность множества поднесущих дополнительно на основе первых принятых символов и вторых принятых символов.
42. Устройство по п.41, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью определять принимаемую мощность первых принятых символов от каждого из первых DFT-преобразований, определять принимаемую мощность вторых принятых символов от каждого из вторых DFT-преобразований, и суммировать принимаемую мощность первых и вторых принятых символов от перекрывающихся первых и вторых DFT-преобразований, чтобы получить принимаемую мощность множества поднесущих.
43. Устройство по п.41, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью сравнивать суммарную принимаемую мощность для каждой конфигурации маяка с пороговым значением и признавать соту обнаруженной для каждой конфигурации маяка, у которой суммарная принимаемая мощность превышает упомянутое пороговое значение.
44. Устройство по.41, в котором упомянутый, по меньшей мере, один процессор выполнен с возможностью определять наибольшую суммарную принимаемую мощность во множестве конфигураций маяка и признавать соту обнаруженной, если наибольшая суммарная принимаемая мощность превышает пороговое значение.
45. Способ беспроводной связи, содержащий этапы, на которых
определяют принимаемую мощность множества поднесущих, используемых для сигналов маяка;
суммируют принимаемую мощность поднесущих, идентифицированных каждой из множества конфигураций маяка; и
выполняют обнаружение сот на основе суммарной принимаемой мощности для каждой из упомянутого множества конфигураций маяка,
причем этап определения принимаемой мощности множества поднесущих содержит этапы, на которых
выполняют первые дискретные преобразования Фурье (DFT-преобразования) на основе временных характеристик первого символа, чтобы получить первые принятые символы для множества поднесущих;
выполняют вторые DFT-преобразования, которые перекрываются с первыми преобразованиями DFT-преобразованиями, на основе временных характеристик второго символа, чтобы получить вторые принятые символы для множества поднесущих; и
определяют принимаемую мощность множества поднесущих на основе первых принятых символов и вторых принятых символов.
46. Способ по п.45, в котором этап обнаружения сот содержит следующие этапы, на которых
сравнивают суммарную принимаемую мощность для каждой конфигурации маяка с пороговым значением; и
признают соту обнаруженной для каждой конфигурации маяка, у которой суммарная принимаемая мощность превышает упомянутое пороговое значение.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ В СИСТЕМЕ РАДИОСВЯЗИ С МНОГОСТАНЦИОННЫМ ДОСТУПОМ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1996 |
|
RU2127963C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

