Изобретение относится к устройствам пожаротушения, а именно к роботизированным установкам пожаротушения.
Известны роботизированные установки пожаротушения, например устройство по АС 2122874. Недостатком известных устройств является отсутствие возможности определения координат загорания в 3-мерной системе координат.
Наиболее близким по технической сути является "Роботизированный пожарный комплекс», патент RU 2319530 С2, содержащий два и более пожарных робота по ГОСТ Р 53326-2009, включающих в себя лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания струи, дисковый затвор с приводом, датчик давления и местный пульт управления, соединенные с блоком коммутации, устройство обнаружения загорания и устройство теленаблюдения, соединенные с устройством идентификации очага загорания и определения его координат, соединенным с устройством управления и отображения информации, в котором формируются управляющие команды по наведению пожарных роботов и пожаротушению, которое соединено с блоком коммутации и через приемно-контрольное устройство с адресными пожарными извещателями.
Недостатками данного устройства является сравнительно небольшая точность наведения струи, вызванная применением только расчетных данных по заданию баллистических параметров наведения струи без обратной связи по реальному направлению движения струи, что существенно ограничивает применение устройства, например, для наружных установок, где на струю влияют переменные ветровые нагрузки, также баллистика струи зависит от других не учитываемых при расчете факторов, например требований к шероховатости поверхности насадка, формирующей струю, которая при эксплуатации претерпевает изменения.
В основу изобретения поставлена задача создания устройства с повышенной точностью наведения струи на очаг загорания с контролем реальной траектории движения струи.
Эта цель достигается тем, что в устройство введена система технического зрения, включающая в себя двухканальные телекамеры с видеоканалом и телеканалом в ИК-диапазоне, установленные на пожарных роботах, которые соединены с устройством идентификации очага загорания и определения его координат, осуществляющим цифровую обработку телесигнала в ИК-диапазоне по заданной программе, и с устройством распознавания струи и определения ее координат, осуществляющим цифровую обработку видеосигнала по заданной программе.
Предложенное техническое решение позволяет повысить точность наведения струи на очаг загорания, осуществлять автоматический контроль за реальным направлением струи и производить эффективное пожаротушение.
Автору не известны устройства с отличительными признаками в соответствии с заявляемыми техническими решениями.
Изобретение отвечает требованиям новизны и положительного эффекта, а также критерию "существенные отличия".
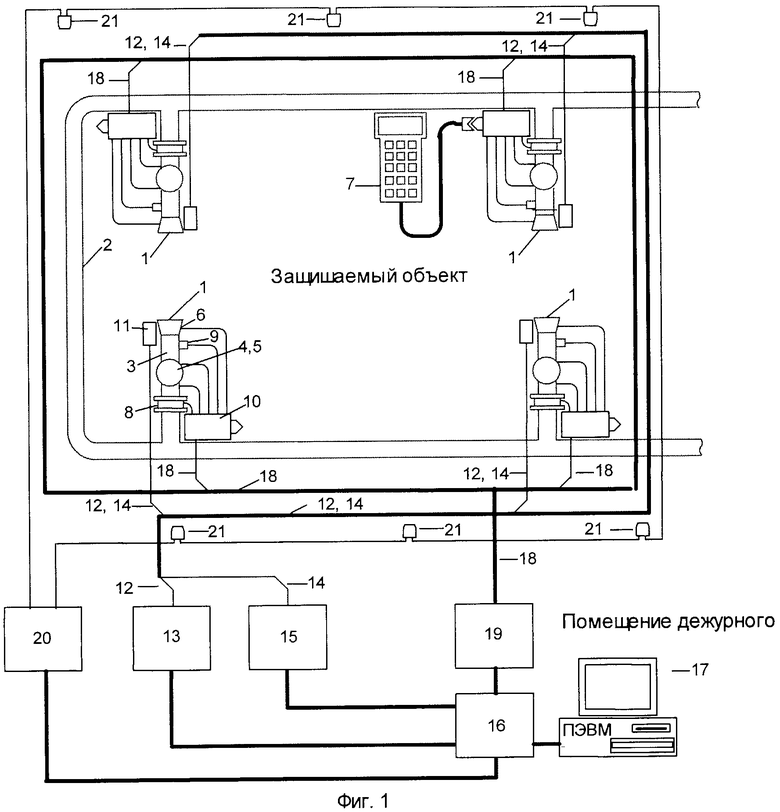
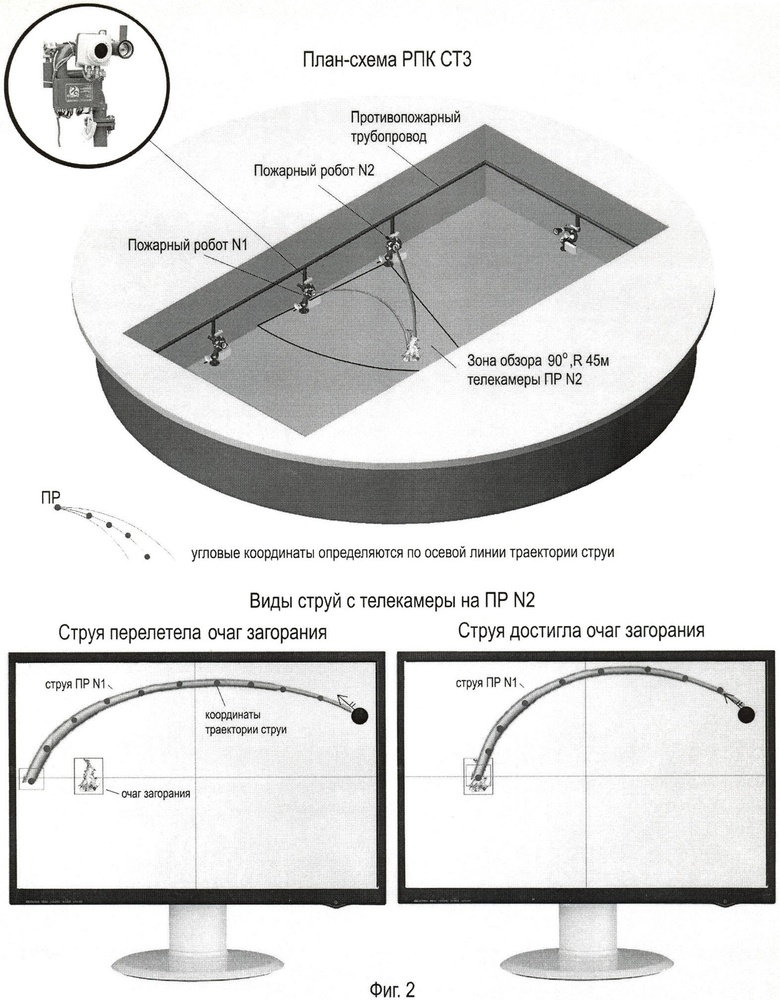
На фиг.1 представлена функциональная схема роботизированного пожарного комплекса с системой технического зрения (РПК СТЗ), на фиг.2 - план-схема РПК СТЗ.
Устройство, см. фиг.1, содержит пожарные роботы (ПР) 1, входящие в состав роботизированного пожарного комплекса (РПК), установленные на противопожарном трубопроводе 2. ПР 1 включает в себя лафетный ствол 3 с приводами вертикального и горизонтального наведения 4, 5, насадок с приводом изменения угла распыливания струи 6, переносной местный пульт управления 7, установленный на вводе дисковый затвор с приводом 8 и датчик давления 9, соединенные с блоком коммутации 10. На ПР 1 установлены двухканальные телекамеры, работающие в ИК- и видеодиапазоне 11, соединенные телевизионной связью по ИК-каналу 12 со входом устройства идентификации очага загорания и определения его координат с программой цифровой обработки телесигнала в ИК-диапазоне 13 и по видеоканалу 14 со входом устройства распознавания струи и определения ее координат с программой цифровой обработки видеосигнала 15. Устройства 11, 13, 15 составляют систему технического зрения (СТЗ). Устройства 13, 15 соединены на выходе с устройством управления наведением пожарных роботов 16 с видеомонитором 17. Устройство управления 16 соединено с блоками коммутации 10 по каналу связи 18, например RS-485, через сетевой контроллер 19. ПР 1 с устройством управления 16, соединенные через сетевой контроллер 19 каналами связи 18, входят в состав РПК. Устройство управления 16 через приемно-контрольное устройство 20 соединено с адресными пожарными извещателями 21.
Устройство работает следующим образом.
В дежурном режиме, см. фиг.1, защищаемый объект находится под постоянным контролем адресных извещателей 21. При возникновении очага загорания в одной из контролируемых зон, см. фиг.2, срабатывают адресные извещатели 21, и приемно-контрольное устройство 20 выдает адресный сигнал «Тревога» в устройство управления 16, которое активизирует ПР 1, расположенные в зоне «Тревоги». Информация от телекамер 11 на ПР 1 в ИК-диапазоне по каналу 12 поступает в устройство 13, где по заданной программе по результатам цифровой обработки телесигналов в ИК-диапазоне под разными углами производится идентификация очага загорания и определяются координаты его энергетического центра и площади в 3-мерной системе координат. По получению информации об очаге загорания устройство управления 16 выдает управляющие сигналы по каналу связи 18 через сетевой контроллер 19 на соответствующие блоки коммутации 10 ПР 1, защищающие данную зону. Приводами вертикального и горизонтального наведения 4, 5 стволы 3 наводятся на очаг загорания по расчетному углу возвышения по программе, заложенной в устройстве управления 16, с учетом баллистики струи и принятого угла распыливания в зависимости от расстояния и давления на датчике давления 9. Устройство управления 16 подает команды на раскрытие заданного угла распыливания и подачу воды, при этом включается привод насадка, открываются дисковые затворы 8 и ПР 1 направляют струи воды с заданным углом распыливания в зону очага загорания. Информация от телекамер 11 на ПР 1 в видеодиапазоне по каналу 14 поступает в устройство 15, где по заданной программе по результатам цифровой обработки видеосигнала под разными углами производится распознавание струй, подаваемых в зону загорания, и определяются координаты в 3-мерной системе координат. По получению информации о положении компактной части струи относительно очага загорания, координаты которого находятся в памяти устройства управления 16: «Недолет» или «Перелет» и изображаются на мониторе 17, см. фиг.1, фиг.2, выдаются управляющие сигналы по каналу связи 18 через сетевой контроллер 19 на соответствующие блоки коммутации 10 ПР 1, защищающие данную зону. Приводами вертикального и горизонтального наведения 4, 5 стволы 3 наводятся на очаг загорания по уточненному углу возвышения по данным о реальном положении струи. После корректировки струй относительно энергетического центра очага загорания устройство управления формирует программу пожаротушения по площади очага загорания, например, строчными струями с пошаговым перемещением строк и с повторением циклов и производит пожаротушение по заданной программе.
Предложенный роботизированный пожарный комплекс с системой технического зрения является эффективным автоматическим и дистанционно управляемым средством борьбы с пожарами, позволяющим направить мощный поток огнетушащего вещества непосредственно на очаг загорания, обнаруженный в ранней стадии, а также высвободить человека из опасных для жизни аварийных зон.
В отличие от известных предложенный роботизированный пожарный комплекс с системой технического зрения позволяет осуществлять автоматический контроль за реальным направлением струи, что существенно повышает точность наведения струи на очаг загорания.
Эти отличительные особенности устройства позволяют его использовать для реализации безлюдных технологий в тяжелых и опасных для жизни людей условиях, значительно повысить эффективность тушения пожаров, уменьшить количество используемого огнетушащего вещества, а также ущерб от пожара.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С СИСТЕМОЙ КОРРЕКЦИИ СТРУИ | 2020 |
|
RU2745641C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С СИСТЕМОЙ БЛИЦ-МОНИТОРИНГА | 2020 |
|
RU2739390C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С СИСТЕМОЙ ПРЕДУПРЕДИТЕЛЬНОГО МОНИТОРИНГА И СЕЛЕКТИВНОГО ТУШЕНИЯ | 2020 |
|
RU2736432C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС С ПОЛНОПРОЦЕССНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2010 |
|
RU2424837C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС НА БАЗЕ ПОЖАРНЫХ МИНИ-РОБОТОВ-ОРОСИТЕЛЕЙ С СИСТЕМОЙ УДАЛЕННОГО ДОСТУПА | 2018 |
|
RU2677622C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ МОДУЛЬНОГО ТИПА ПОВТОРНО-КРАТКОВРЕМЕННОГО ДЕЙСТВИЯ | 2022 |
|
RU2785398C1 |
| Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия | 2020 |
|
RU2751690C1 |
| Роботизированная установка пожаротушения | 2021 |
|
RU2760650C1 |
| Способ тушения пожаров роботизированными установками пожаротушения | 2023 |
|
RU2808270C1 |
| Роботизированная установка пожаротушения с системой оптимизации и контроля параметров тушения | 2020 |
|
RU2739820C1 |
Роботизированный пожарный комплекс с системой технического зрения относится к роботизированным установкам пожаротушения. Для создания устройства с повышенной точностью наведения струи на очаг загорания с контролем реальной траектории движения струи в устройство, содержащее два и более пожарных робота, введена система технического зрения, включающая в себя двухканальные телекамеры с видеоканалом и телеканалом в ИК-диапазоне, установленные на пожарных роботах, которые соединены с устройством идентификации очага загорания и определения его координат, осуществляющим цифровую обработку телесигнала в ИК-диапазоне по заданной программе, и с устройством распознавания струи и определения ее координат, осуществляющим цифровую обработку видеосигнала по заданной программе. 2 ил.
Роботизированный пожарный комплекс с системой технического зрения, содержащий два и более пожарных робота, включающих в себя лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания струи, дисковый затвор с приводом, датчик давления и местный пульт управления, соединенные с блоком коммутации, устройство обнаружения загорания и устройство теленаблюдения, соединенные с устройством идентификации очага загорания и определения его координат, соединенным с устройством управления и отображения информации, в котором формируются управляющие команды по наведению пожарных роботов и пожаротушению, которое соединено с блоком коммутации и через приемно-контрольное устройство - с адресными пожарными извещателями, отличающийся тем, что в устройство введена система технического зрения, включающая в себя двухканальные телекамеры с видеоканалом и телеканалом в ИК-диапазоне, установленные на пожарных роботах, соединенные со входом устройства идентификации очага загорания и определения его координат с программой цифровой обработки телесигнала в ИК-диапазоне и со входом устройства распознавания струи и определения ее координат с программой цифровой обработки видеосигнала, соединенных на выходе с устройством управления и видеомонитором.
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС | 2005 |
|
RU2319530C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕК ВНЕШНЕЙ СРЕДЫ ДЛЯ ПОСТРОЕНИЯ ЕЕ ТРЕХМЕРНОЙ МОДЕЛИ В СТЕРЕОТЕЛЕВИЗИОННОЙ СИСТЕМЕ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 1993 |
|
RU2065133C1 |
| CN 101574567 A, 11.11.2009 | |||
| US 2009184244 A1, 23.07.2009 | |||
| Способ упрочнения соединения, сваренного стыковой электроконтактной сваркой | 1950 |
|
SU92973A1 |
| FR 2877126 A1, 28.04.2006 | |||
| Композиция зажигательного действия | 2016 |
|
RU2635134C1 |

