Изобретение относится к устройствам пожаротушения, а именно к роботизированным установкам пожаротушения.
Известны роботизированные установки пожаротушения, например, устройство по а.с. 2122874. Недостатком известных устройств является отсутствие возможности определения координат загорания в 3-мерной системе координат.
Наиболее близким по технической сути является "Роботизированный пожарный комплекс» патент RU 2319530 С2, содержащий пожарные роботы, включающие в себя лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания струи, переносной пульт управления, дисковый затвор с приводом и датчик давления, соединенные с блоком коммутации, и установленное на стволе оптическое устройство с телекамерой и ИК-датчиком, соединенное через устройство идентификации и определения координат очага загорания с устройством управления с видеомонитором, соединенное с блоком коммутации.
Недостатками данного устройства является его высокая инерционность, связанная со значительным временем поиска очага загорания и определения его координат механическим сканированием по всей защищаемой зоне, что позволяет очагу загорания развиваться до значительных размеров, приводя к увеличению ущерба от пожара.
В основу изобретения поставлена задача создания устройства с одновременным мониторингом очага загорания по фиксированным зонам всего защищаемого объекта и с ускоренным наведением оптического устройства на очаг загорания по кратчайшему пути, определенному программой мониторинга.
Эта цель достигается тем, что в устройство дополнительно введен блок блиц-мониторинга по фиксированным зонам, соединенный с устройством идентификации и определения координат очага загорания и с устройством управления с видеомонитором, а оптическое устройство оснащено собственными приводами горизонтального и вертикального наведения, соединенными с блоком коммутации.
Предложенное техническое решение позволяет значительно сократить время определения координат и наведения ствола на очаг загорания и производить тушение в начальной стадии пожара.
Автору не известны устройства с отличительными признаками в соответствии с заявляемыми техническими решениями.
Изобретение отвечает требованиям новизны и положительного эффекта, а также критерию "существенные отличия".
На фиг. 1 представлена функциональная схема роботизированной установки пожаротушения с системой блиц-мониторинга (РУП), на фиг. 2 - общий вид пожарного робота.
РУП включает в себя пожарные роботы (ПР) 1, установленные на противопожарном трубопроводе 2. В ПР 1 входят лафетный ствол 3 с приводами вертикального и горизонтального наведения 4, 5, насадок с приводом изменения угла распыливания струи 6, переносной пульт управления 7, установленный на вводе дисковый затвор с приводом 8 и установленный на выходе ствола датчик давления 9, соединенные с блоком коммутации 10, и установленное на стволе оптическое устройство с телекамерой и ИК-датчиком 11. В РУП входят также устройство управления 12 с видеомонитором, соединенное с блоком коммутации 10 по каналу связи 13, например, по RS-485 через сетевой контроллер 14, а также с приемно-контрольным устройством 15 с пожарными извещателями 16, и с устройством цифровой обработки сигнала в ИК-диапазоне 17, соединенным двухканальной связью 18 (видеоканал и ИК-канал) с оптическим устройством с телекамерой и ИК-датчиком 11 и блоком блиц-мониторинга по фиксированным зонам 19. Оптическое устройство с телекамерой и ИК-датчиком 11 смонтировано в отдельном корпусе, см. фиг. 2, и снабжено приводами горизонтального и вертикального наведения 20, 21, соединенными с блоком коммутации 10.
Устройство работает следующим образом. ПР 1 в соответствии с нормативными требованиями располагаются так, чтобы каждая точка была в пределах досягаемости двух струй и в зоне наблюдения двух оптических устройств. Исходя из этих условий проектом составляются карты защищаемых зон: орошаемых струями и контролируемых оптическими устройствами. Учитывая, что в оптическом устройстве 11 используется ИК-матричный датчик с углом обзора 90 град, охватывающий квадрант, этим квадрантом фиксируется защищаемая зона объекта, например, слева перед ПР 1. Оптическое устройство 11 сориентировано по биссектрисе квадранта, причем ствол 3 расположен осью наведения на краю квадранта, вне поля углового обзора оптического устройства 11.
Другие квадранты вокруг этого ПР 1 фиксируются оптическими устройствами 11 соседних ПР 1. При такой расстановке оптических устройств 11 весь защищаемый объект контролируется ПР 1. При пусконаладочных работах в блок блиц-мониторинга фиксированных зон 19 заносятся координаты положения ствола 3 и оптических устройств 11 в фиксированных зонах. На видеомониторе устройства управления 12 на общем виде защищаемого объекта рамками выделяются все фиксируемые зоны. Фиксированные зоны в программе блока блиц-мониторинга 19 имеют функцию рабочей зоны для данного ПР 1, который тушит эту зону при возникновении там загорания. В программу также закладывается резервный ПР 1 для данной зоны. В дежурном режиме защищаемый объект находится под постоянным контролем пожарных извещателей 16, а оптические устройства 11 ориентированы на фиксированные зоны по всему защищаемому объекту. При возникновении очага загорания срабатывают пожарные извещатели 16 и приемно-контрольное устройство 15 выдает сигнал «Тревога» на устройство управления 12, которое включает все ПР 1 в работу. В блоке блиц-мониторинга фиксированных зон 19 заданные координаты фиксированных зон сравниваются с текущими. Сигнал подтверждения их соответствия поступает в устройство управления 12 и устройство цифровой обработки сигнала в ИК-диапазоне 17. От оптических устройств 11 видео- и ИК-сигналы о состоянии в фиксированных зонах поступают по двухканальной связи 18 на устройство цифровой обработки сигнала в ИК-диапазоне 17. После программной обработки поступившей информации устройство 17 производит идентификацию загорания и совместно с блоком блиц-мониторинга фиксированных зон 19 определяет зону загорания, рабочий и резервный ПР 1, относящиеся к этой зоне, и местоположение очага загорания в этой зоне. Данная информация передается на устройство управления 12, которое затем выдает управляющие сигналы по каналу связи 13 на соответствующие блоки коммутации 10 ПР 1, защищающих данную зону. Приводами вертикального и горизонтального наведения 4,5 стволы 3 наводятся на очаг загорания по кратчайшему пути к местоположению очага загорания. Для ускоренного наведения оптического устройства 11 включаются их собственные приводы горизонтального и вертикального наведения 20, 21. После наведения на очаг загорания оптических устройств 11 видео- и ИК-сигналы поступают по двухканальной телевизионной связи 18 на устройство цифровой обработки сигнала 17. По результатам программной обработки поступившей информации устройство 17 производит идентификацию загорания, определяет его координаты и размеры площади загорания и передает ее в устройство управления 12. Устройство 12 формирует управляющие сигналы по каналу связи 13 о координатах загорания на соответствующие блоки коммутации 10 РУП 1. Приводами вертикального и горизонтального наведения 4,5 стволы 3 наводятся на очаг загорания, после чего устройство управления 12 подает команду «запуск» и посылает технологические команды на включение насосной, на открытие дисковых затворов 8, на отработку программ пожаротушения. Пожаротушение больших площадей производится строчными струями с пошаговым перемещением строк и с повторением циклов. На небольших расстояниях и для небольших зон достаточно использовать расширенный факел струи. Наведение стволов на очаг загорания контролируется по баллистическим данным струи в зависимости от угла возвышения ствола и давления в сети. Информация о загорании на объекте передается дежурному оператору на пункт круглосуточного дежурства. На экране видеомонитора устройства управления 12 видеоинформация по каналу связи 18 от оптического устройства 11 после цифровой обработке очаг загорания в устройствах 17, 19 появляется в виде изображения очага загорания, выделенного в рамке. Дежурный, получая оперативную видеоинформацию, может взять управление на себя, перейдя в дистанционный режим.
Предложенная роботизированная установка пожаротушения является эффективным автоматическим и дистанционно управляемым средством борьбы с пожарами, позволяющим направить мощный поток огнетушащего вещества непосредственно на очаг загорания, обнаруженный в ранней стадии, а также высвободить человека из опасных для жизни аварийных зон.
В отличие от известных, предложенная роботизированная установка пожаротушения включает в себя дополнительные устройства, позволяющие ускорить мониторинг защищаемого объекта для выявления очагов загорания и определения его координат.
Эти отличительные особенности устройства позволяют значительно сократить время от начала загорания до запуска установки пожаротушения и производить тушение в начальной стадии пожара.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С СИСТЕМОЙ ПРЕДУПРЕДИТЕЛЬНОГО МОНИТОРИНГА И СЕЛЕКТИВНОГО ТУШЕНИЯ | 2020 |
|
RU2736432C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С СИСТЕМОЙ КОРРЕКЦИИ СТРУИ | 2020 |
|
RU2745641C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС С СИСТЕМОЙ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2010 |
|
RU2433847C1 |
| Многофункциональный робототехнический комплекс предупредительного мониторинга, обнаружения возгораний и управления пожаротушением производственных объектов | 2021 |
|
RU2775482C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС | 2005 |
|
RU2319530C2 |
| Многофункциональный робототехнический комплекс противопожарной защиты производственных объектов на базе роботизированной установки пожаротушения и мобильного роботизированного комплекса | 2023 |
|
RU2814057C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС С АЗОТНО-ВОДЯНЫМ ПОЖАРОТУШЕНИЕМ | 2010 |
|
RU2426603C1 |
| РОБОТИЗИРОВАННЫЙ ОХРАННО-ПОЖАРНЫЙ КОМПЛЕКС | 2010 |
|
RU2426570C1 |
| Роботизированная установка пожаротушения | 2021 |
|
RU2760650C1 |
| Роботизированная установка пожаротушения с системой оптимизации и контроля параметров тушения | 2020 |
|
RU2739820C1 |


Роботизированная установка пожаротушения с системой блиц-мониторинга относится к роботизированным установкам пожаротушения. Устройство включает в себя пожарные роботы с лафетным стволом с приводами вертикального и горизонтального наведения, насадком с приводом изменения угла распыливания струи, переносным пультом управления, дисковым затвором с приводом и датчиком давления, соединенными с блоком коммутации, с установленным на стволе оптическим устройством с телекамерой и ИК-датчиком, а также устройство идентификации и определения координат очага загорания, соединенное с устройством управления с видеомонитором, соединенное с блоком коммутации и определения координат очага загорания и с устройством управления на выходе. Согласно изобретению, в устройство дополнительно введен блок блиц-мониторинга по фиксированным зонам, соединенным с устройством идентификации и определения координат очага загорания и с устройством управления с видеомонитором, а оптическое устройство оснащено собственными приводами горизонтального и вертикального наведения, соединенными с блоком коммутации.
Отличительные особенности устройства позволяют значительно сократить время от начала загорания до запуска установки пожаротушения и производить тушение в начальной стадии пожара. 2 ил.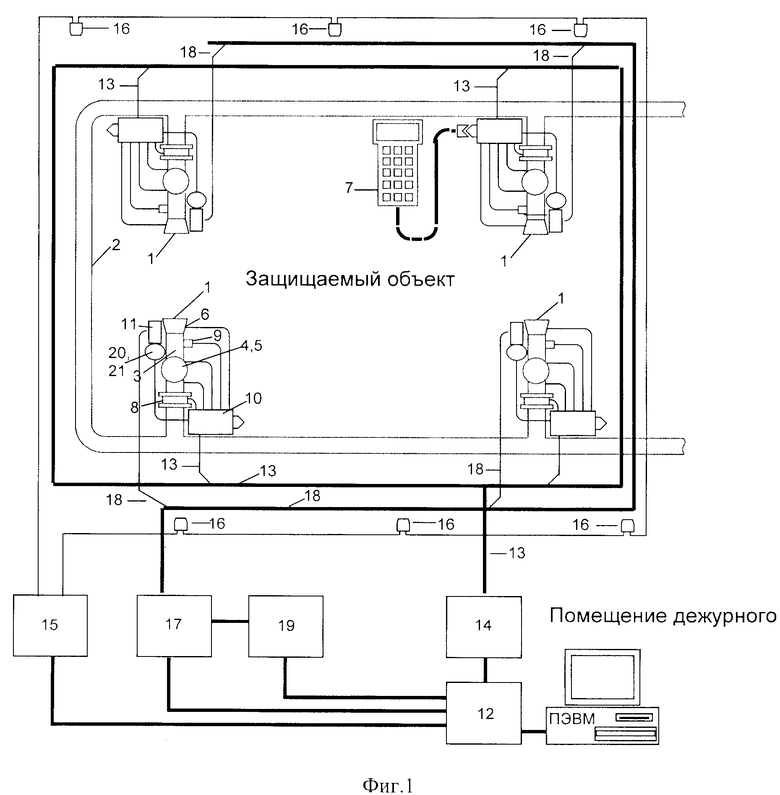
Роботизированная установка пожаротушения с системой блиц-мониторинга, включающая в себя пожарные роботы с лафетным стволом с приводами вертикального и горизонтального наведения, насадком с приводом изменения угла распыливания струи, переносным пультом управления, дисковым затвором с приводом и датчиком давления, соединенными с блоком коммутации, с установленным на стволе оптическим устройством с телекамерой и ИК-датчиком, а также устройство идентификации и определения координат очага загорания, соединенное с устройством управления с видеомонитором, соединенное с блоком коммутации, отличающаяся тем, что в устройство дополнительно введен блок блиц-мониторинга по фиксированным зонам, соединенный с устройством идентификации и определения координат очага загорания и с устройством управления с видеомонитором, а оптическое устройство оснащено собственными приводами горизонтального и вертикального наведения, соединенными с блоком коммутации.
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС | 2005 |
|
RU2319530C2 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ | 1997 |
|
RU2128536C1 |
| JP 59002759 A, 09.01.1984 | |||
| JP 2017213011 A, 07.12.2017. | |||

