Изобретение относится к устройствам пожаротушения, а именно к роботизированным установкам пожаротушения (РУП).
Известны роботизированные установки пожаротушения, например, устройство по а.с. 2122874. Их недостатком является использование большого объема огнетушащего вещества (ОТВ), вызванного тушением всем расходом, несоразмерным с очагом загорания.
Наиболее близким по технической сути является «Роботизированный пожарный комплекс с полнопроцессной системой управления», патент № 2424837, содержащий два и более пожарных робота, включающие в себя лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания струи, дисковый затвор с приводом, датчик давления и местный пульт управления, соединенные с блоком коммутации на входе, а на его выходе с устройством управления, в котором формируются управляющие команды по наведению ствола и пожаротушению, установленное на стволе устройство обнаружения загорания и теленаблюдения, соединенное с устройством цифровой обработки сигнала в ИК-диапазоне, в котором программно реализуются алгоритмы определения координат очага загорания, соединенное с видеоконтрольным устройством и устройством управления, которое также соединено с пожарными извещателями, блок управления процессом пожаротушения с программой тушения строчными струями с параметрами: площадь орошения  , равная площади сканирования в растре
, равная площади сканирования в растре  , где L - длина строки растра сканирования, а Н - высота растра сканирования, шаг сканирования h, угловая скорость сканирования w, соединенный на входе с приемно-контрольным устройством и устройством цифровой обработки сигнала в ИК-диапазоне, а на выходе с устройством управления.
, где L - длина строки растра сканирования, а Н - высота растра сканирования, шаг сканирования h, угловая скорость сканирования w, соединенный на входе с приемно-контрольным устройством и устройством цифровой обработки сигнала в ИК-диапазоне, а на выходе с устройством управления.
Недостатками данного устройства является то, что несмотря на уменьшение объема ОТВ на тушение путем прекращения тушения при отсутствии горения, установленный расход РУП, принимаемый без учета технологии тушения строчными струями всем расходом, несмотря на избыточную интенсивность орошения, остается неизменным, что приводит к необходимости строительства соответствующих под этот расход насосных станций, электрических подстанций и сетей коммуникаций, в устройстве также отсутствует система контроля соответствия базовых параметров тушения строчными струями нормативным параметрам: интенсивностью орошения, минимально допустимой площадью и периодом цикла сканирования, что не позволяет их оптимизировать и снижает в целом эффективность тушения.
В основу изобретения поставлена задача создания устройства пожаротушения, оптимизированного по параметрам тушения строчными струями и с возможностью контроля соответствия базовых параметров тушения нормативным.
Эта цель достигается тем, что в устройстве к блоку управления процессом пожаротушения дополнительно подключается блок оптимизации и контроля параметров тушения с программой коррекции тушения, в базу данных которой включаются взаимосвязанные параметры, оптимизирующие и контролирующие пожаротушение:  – номинальный расход пожарного робота, определяемый по формуле
– номинальный расход пожарного робота, определяемый по формуле  , где
, где  – оптимизированный расход,
– оптимизированный расход,  – коэффициент, учитывающий потери при подаче ОТВ,
– коэффициент, учитывающий потери при подаче ОТВ,  – коэффициент, учитывающий погрешности наведения струи, а
– коэффициент, учитывающий погрешности наведения струи, а  – расход на площади
– расход на площади  , определяемый по формуле
, определяемый по формуле  , где
, где  - нормативная интенсивность орошения на минимальной площади
- нормативная интенсивность орошения на минимальной площади  ;
;
 - средняя интенсивность орошения при строчном сканировании, связанная отношением
- средняя интенсивность орошения при строчном сканировании, связанная отношением  , где
, где  – расход на орошаемой площади
– расход на орошаемой площади  , определяемый по формуле
, определяемый по формуле  );
);
Т
- длительность цикла выполнения программы растра сканирования, связанная отношением  , где
, где  – установленный предел длительности цикла, а
– установленный предел длительности цикла, а  - суммарная длина строк (дуг окружности) и шагов растра сканирования, где
- суммарная длина строк (дуг окружности) и шагов растра сканирования, где - число строк сканирования, а
- число строк сканирования, а  , где
, где  - длина зоны максимальной интенсивности в месте контакта стационарной струи с поверхностью с интенсивностью
- длина зоны максимальной интенсивности в месте контакта стационарной струи с поверхностью с интенсивностью  ,
,  - линейная скорость перемещения, связанная отношением
- линейная скорость перемещения, связанная отношением  , где
, где  - эффективный радиус сканирования, определяемый дальностью струи до точки максимальной интенсивности
- эффективный радиус сканирования, определяемый дальностью струи до точки максимальной интенсивности  .
.
Предложенное техническое решение позволяет создать устройство с программой тушения строчными струями с оптимизированными параметрами тушения и возможностью контроля текущих параметров в процессе тушения относительно базовых нормативных параметров.
Автору не известны устройства с отличительными признаками в соответствии с заявляемыми техническими решениями.
Изобретение отвечает требованиям новизны и положительного эффекта, а также критерию “существенные отличия”.
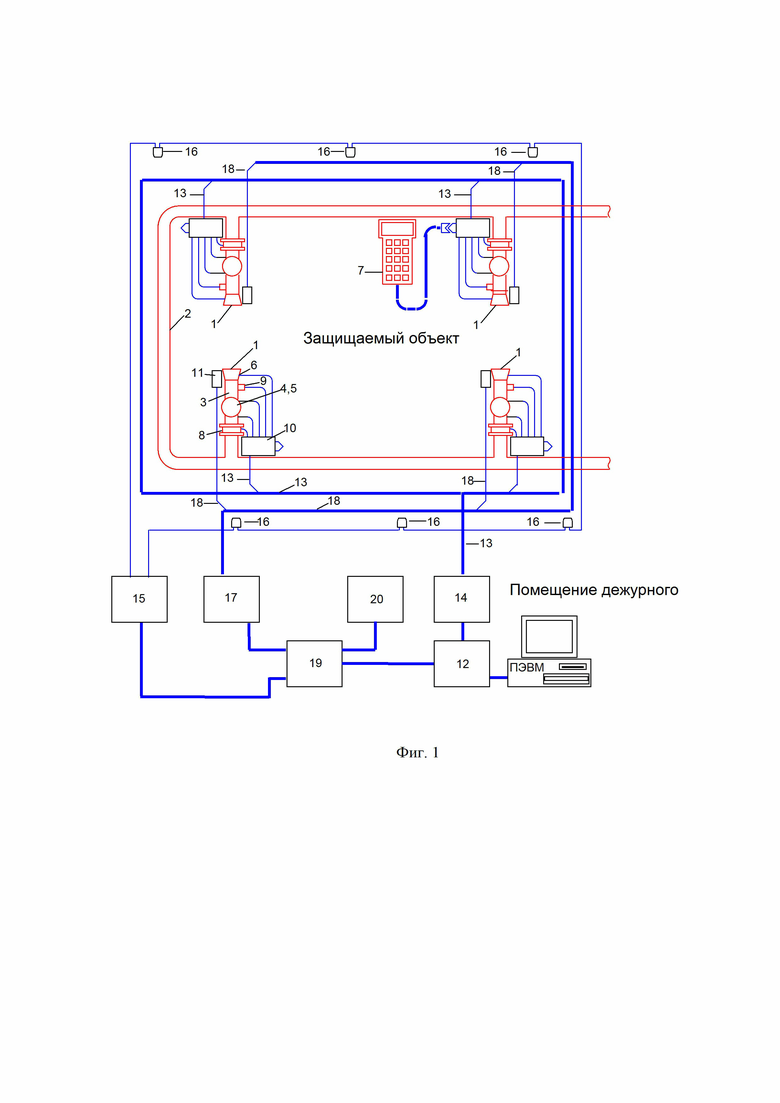
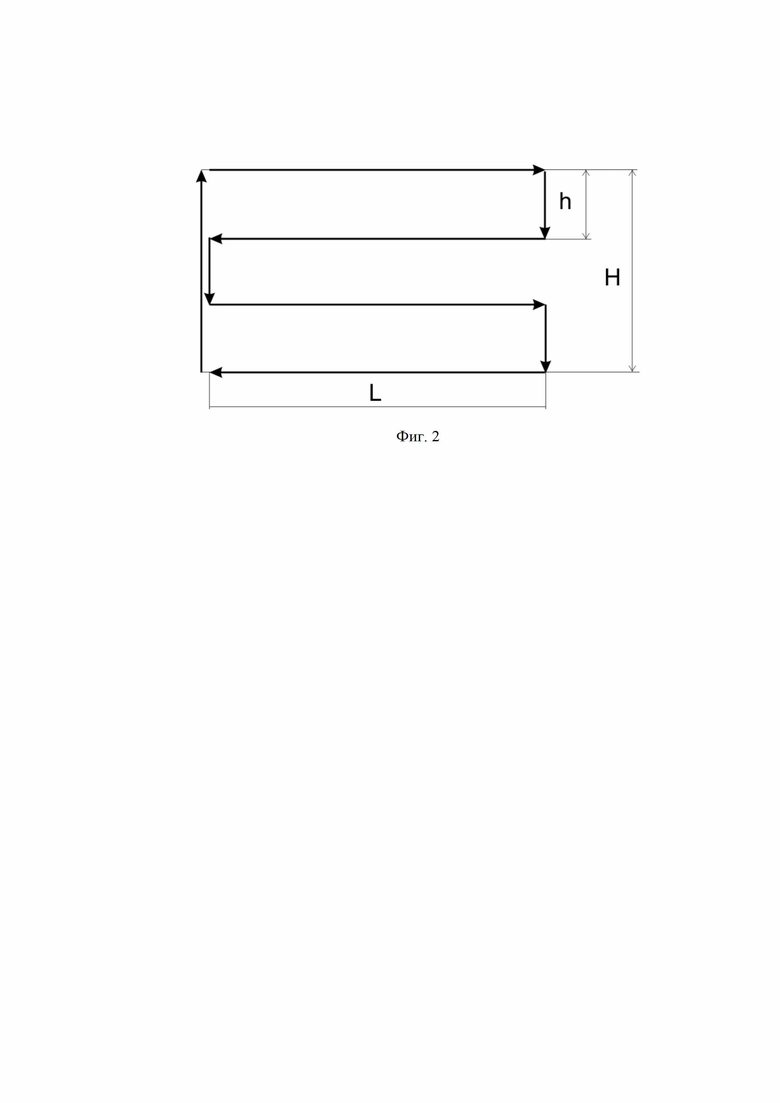
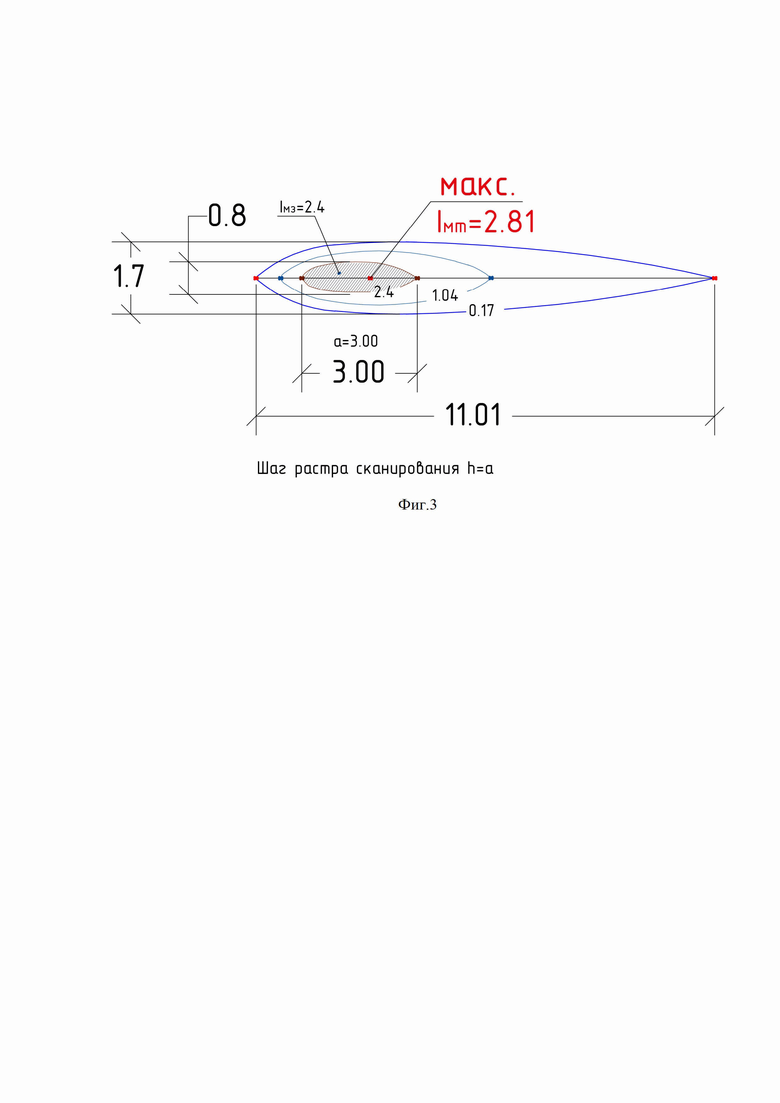
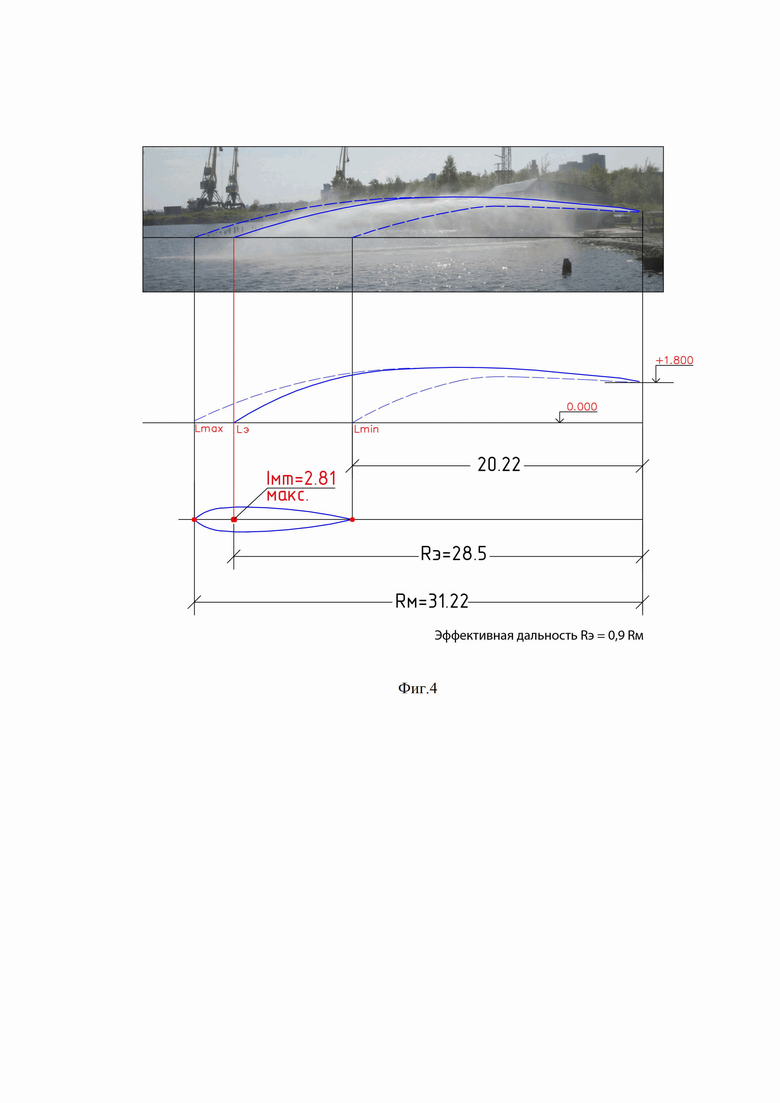
На фиг. 1 представлена функциональная схема роботизированной установки пожаротушения (РУП), на фиг. 2 - строчный растр перемещения струи по площади, на фиг. 3 - распределение интенсивности орошения в зоне контакта стационарной струи с поверхностью, на фиг. 4 - траектория стационарной струи пожарного робота.
Устройство содержит пожарные роботы (ПР) 1, объединенные в РУП, установленные на противопожарном трубопроводе 2. ПР 1 включает в себя лафетный ствол 3 с приводами вертикального и горизонтального наведения 4,5, насадок с приводом изменения угла распыливания струи 6, переносной пульт управления 7, установленный на вводе дисковый затвор с приводом 8 и установленный на выходе ствола перед насадком датчик давления 9, соединенные с блоком коммутации 10, установленное на стволе устройство обнаружения загорания и теленаблюдения 11. В РУП входит устройство управления 12 с дисплеем, соединенное с блоком коммуникации 10 по каналу связи 13, например, RS-485, через сетевой контроллер 14, приемно-контрольное устройство 15 с пожарными извещателями 16 и устройство цифровой обработки сигнала в ИК-диапазоне 17, соединенное двухканальной телевизионной связью 18 (видеоканал и ИК-канал) с устройством обнаружения загорания и теленаблюдения 11, блок управления процессом пожаротушения 19 с программой тушения. Программа тушения включает в себя программу построчного сканирования в растре в соответствии с требованиями нормативных документов, например ГОСТ Р 53326 п. 5.1.26, с параметрами, см. фиг.2: площадь орошения  , покрывающая всю площадь очага загорания.
, покрывающая всю площадь очага загорания.  равна площади сканирования в растре
равна площади сканирования в растре , где L длина строки, Н высота растра, шаг сканирования h, угловая скорость сканирования w, по ТУ 4854-005-16820082-2005 п. 2.1.1.13
, где L длина строки, Н высота растра, шаг сканирования h, угловая скорость сканирования w, по ТУ 4854-005-16820082-2005 п. 2.1.1.13  . Блок управления процессом пожаротушения 19 соединен на входе с приемно-контрольным устройством 15 и устройством цифровой обработки сигнала в ИК-диапазоне 17, а на выходе с устройством управления 12 и блоком оптимизации и контроля параметров тушения 20 с программой коррекции тушения. В программу коррекции включаются взаимосвязанные параметры тушения:
. Блок управления процессом пожаротушения 19 соединен на входе с приемно-контрольным устройством 15 и устройством цифровой обработки сигнала в ИК-диапазоне 17, а на выходе с устройством управления 12 и блоком оптимизации и контроля параметров тушения 20 с программой коррекции тушения. В программу коррекции включаются взаимосвязанные параметры тушения:
- номинальный расход пожарного робота, выбирается из ряда номинальных расходов ПР и в соответствии с требованиями нормативных документов, например ГОСТ Р 53326 п. 5.1.5, должен соответствовать ТД завода из условия  , где - оптимизированный расход, определяемый по формуле
, где - оптимизированный расход, определяемый по формуле  , где
, где  – минимальный расход, определяемый по формуле , где - минимальная площадь с интенсивностью орошения не менее нормативной в соответствии с требованиями нормативных документов, например СП5.13130.2009 табл. 5.1,
– минимальный расход, определяемый по формуле , где - минимальная площадь с интенсивностью орошения не менее нормативной в соответствии с требованиями нормативных документов, например СП5.13130.2009 табл. 5.1,  - коэффициент, учитывающий потери расхода при подаче ОТВ, определен экспериментально для максимальной дальности ПР.
- коэффициент, учитывающий потери расхода при подаче ОТВ, определен экспериментально для максимальной дальности ПР.  - коэффициент, учитывающий потери расхода из-за погрешности наведения струи ПР, которая по требованиям нормативных документов, например ГОСТ Р 53326 п. 5.1.14, должна быть не более 1°. Принимая на максимальной дальности угол растра сканирования для
- коэффициент, учитывающий потери расхода из-за погрешности наведения струи ПР, которая по требованиям нормативных документов, например ГОСТ Р 53326 п. 5.1.14, должна быть не более 1°. Принимая на максимальной дальности угол растра сканирования для  , погрешность по площади составит
, погрешность по площади составит  , учитывая, что при меньшей дальности это отношение будет только уменьшаться. Потери же расхода составят
, учитывая, что при меньшей дальности это отношение будет только уменьшаться. Потери же расхода составят  , а общий расход с потерями от погрешности наведения составит:
, а общий расход с потерями от погрешности наведения составит:  , откуда . Номинальный расход
, откуда . Номинальный расход  выбирается ближайшим большим из ряда номинальных расходов ПР из условия . При выбранном номинальном расходе , расход, участвующий в орошении , составляет
выбирается ближайшим большим из ряда номинальных расходов ПР из условия . При выбранном номинальном расходе , расход, участвующий в орошении , составляет  .
.
iср
- средняя интенсивность орошения строчным сканированием согласно нормативным документам, например ГОСТ Р 53326 п. 5.1.6, п. 5.1.34, определяется как отношение номинального расхода ПР к площади зоны орошения за время длительности цикла  и должна быть не менее нормируемой интенсивности орошения
и должна быть не менее нормируемой интенсивности орошения  . Средняя интенсивность
. Средняя интенсивность  , ввиду тушения всем расходом , имеет очень высокие значения на малых площадях. С учетом того, что ПР имеет чувствительность обнаружения загорания, по нормативным документам, например ГОСТ Р 53326 п.5.1.35, на площади 0,1 м2, то очаги в начальной стадии загорания ПР тушит с интенсивностью
, ввиду тушения всем расходом , имеет очень высокие значения на малых площадях. С учетом того, что ПР имеет чувствительность обнаружения загорания, по нормативным документам, например ГОСТ Р 53326 п.5.1.35, на площади 0,1 м2, то очаги в начальной стадии загорания ПР тушит с интенсивностью  . На площади 10 м2 ПР имеет интенсивность
. На площади 10 м2 ПР имеет интенсивность  - в 10 раз выше установленной для автоматических установок пожаротушения (АУП) нормативными документами, например СП5.13130.2009 табл. 5.1, что делает тушение эффективным и быстродействующим. На значительной части защищаемой площади обеспечивается интенсивность
- в 10 раз выше установленной для автоматических установок пожаротушения (АУП) нормативными документами, например СП5.13130.2009 табл. 5.1, что делает тушение эффективным и быстродействующим. На значительной части защищаемой площади обеспечивается интенсивность  , но для всей защищаемой площади для выбранного оптимизированного номинального расхода соблюдается требуемая интенсивность орошения
, но для всей защищаемой площади для выбранного оптимизированного номинального расхода соблюдается требуемая интенсивность орошения  , в соответствии с требованиями к АУП в нормативных документах, например, в Федеральном законе №123-ФЗ, ст. 111.
, в соответствии с требованиями к АУП в нормативных документах, например, в Федеральном законе №123-ФЗ, ст. 111.
Т - длительность цикла выполнения программы растра сканирования, связанная отношением  , где
, где  – установленный предел длительности цикла.
– установленный предел длительности цикла.
Допустимое время длительности цикла, в соответствии с требованиями нормативных документов, например ГОСТ Р 53326 п. 5.1.30, составляет 60 c. Вместе с тем из требований нормативных документов, например ГОСТ Р 53326 п. 5.1.37, по быстродействию ПР время воздействия на обнаруженный очаг загорания должно быть не более 20 с. Принимается  . При расчете время реверсирования перемещения струи совпадает со временем перемещения шага сканирования. В формуле
. При расчете время реверсирования перемещения струи совпадает со временем перемещения шага сканирования. В формуле 
 - суммарная длина строк и шагов растра сканирования, где
- суммарная длина строк и шагов растра сканирования, где  - число строк сканирования. h - шаг сканирования для обеспечения равномерного распределения ОТВ по защищаемой площади - принимается равным размеру а зоны максимальной интенсивности
- число строк сканирования. h - шаг сканирования для обеспечения равномерного распределения ОТВ по защищаемой площади - принимается равным размеру а зоны максимальной интенсивности  в месте контакта стационарной струи с поверхностью
в месте контакта стационарной струи с поверхностью  , где интенсивность имеет значения
, где интенсивность имеет значения  , см. фиг.3. В формуле параметр
, см. фиг.3. В формуле параметр  – линейная скорость перемещения:
– линейная скорость перемещения:  , где
, где  эффективная дальность - дальность струи до точки максимальной интенсивности
эффективная дальность - дальность струи до точки максимальной интенсивности  , а
, а  – максимальная дальность струи при заданном угле возвышения, см. фиг. 4. По общепринятым данным, см. монографию «Пожарные роботы и ствольная техника в пожарной автоматике и пожарной охране», М., 2013 г., с. 84, коэффициент эффективности
– максимальная дальность струи при заданном угле возвышения, см. фиг. 4. По общепринятым данным, см. монографию «Пожарные роботы и ствольная техника в пожарной автоматике и пожарной охране», М., 2013 г., с. 84, коэффициент эффективности  , определяющий эффективную дальность:
, определяющий эффективную дальность:  . В соответствии с требованиями нормативных документов, например ГОСТ Р 53326 п. 5.1.11, угловая скорость сканирования пожарным стволом ПР при подаче огнетушащего вещества
. В соответствии с требованиями нормативных документов, например ГОСТ Р 53326 п. 5.1.11, угловая скорость сканирования пожарным стволом ПР при подаче огнетушащего вещества  должна быть не менее 3 °/с:
должна быть не менее 3 °/с:  . На этой скорости при
. На этой скорости при  наступает предел допустимой линейной скорости 3 м/с, связанный с воздействием сопротивления воздуха и заламыванием струи, см. требования к лафетным стволам в нормативных документах, например ГОСТ Р 51115-97 п. 7.3. Принимается
наступает предел допустимой линейной скорости 3 м/с, связанный с воздействием сопротивления воздуха и заламыванием струи, см. требования к лафетным стволам в нормативных документах, например ГОСТ Р 51115-97 п. 7.3. Принимается  . При одинаковой угловой скорости с уменьшением расстояния до зоны орошения
. При одинаковой угловой скорости с уменьшением расстояния до зоны орошения  линейная скорость уменьшается, а угловой растр сканирования при одной и той же площади, например
линейная скорость уменьшается, а угловой растр сканирования при одной и той же площади, например  , увеличивается. Для того, чтобы уложиться в параметр , необходимо увеличивать угловую скорость при соблюдении условия
, увеличивается. Для того, чтобы уложиться в параметр , необходимо увеличивать угловую скорость при соблюдении условия  . Установив скорость
. Установив скорость  , мы получим одинаковую длительность цикла из условия
, мы получим одинаковую длительность цикла из условия  , изменяя при этом угловую скорость :
, изменяя при этом угловую скорость :  . Для небольших площадей, для которых соблюдается условие
. Для небольших площадей, для которых соблюдается условие  , угловая скорость может быть одинаковой
, угловая скорость может быть одинаковой  на всех расстояниях до зоны орошения.
на всех расстояниях до зоны орошения.
Устройство работает следующим образом. При подготовке РУП к работе в базу данных программы тушения вносятся базовые параметры РУП. Рассмотрим пример для помещения группы 2 (СП 5.13130.2009 табл. 5.1) с параметрами:  и
и  , которые заносятся в базу данных через устройство управления 12 с дисплеем. Эти данные направляются в блок оптимизации и контроля параметров тушения 20, по которым производится расчет номинального расхода РУП
, которые заносятся в базу данных через устройство управления 12 с дисплеем. Эти данные направляются в блок оптимизации и контроля параметров тушения 20, по которым производится расчет номинального расхода РУП  из условия
из условия  , где
, где  - оптимизированный расход, определяемый по формуле
- оптимизированный расход, определяемый по формуле  , где
, где  – минимальный расход, определяемый по формуле
– минимальный расход, определяемый по формуле  . Оптимизированный расход
. Оптимизированный расход  . Из условия программа предложит ближайший больший номинальный расход из ряда номинальных расходов ПР - 20 л/с. Принимаем
. Из условия программа предложит ближайший больший номинальный расход из ряда номинальных расходов ПР - 20 л/с. Принимаем  . Если будет принят другой расход, например 30 л/с, то программа будет работать с ним, несмотря на избыточность. Для выбранного расхода в программе имеются заводские установки параметров шага сканирования h в зависимости от Rэ и угла распыливания. Все остальные текущие параметры программа рассчитывает в процессе работы по приведенным формулам. Рассмотрим соответствие при выбранном расходе из условия интенсивности орошения
. Если будет принят другой расход, например 30 л/с, то программа будет работать с ним, несмотря на избыточность. Для выбранного расхода в программе имеются заводские установки параметров шага сканирования h в зависимости от Rэ и угла распыливания. Все остальные текущие параметры программа рассчитывает в процессе работы по приведенным формулам. Рассмотрим соответствие при выбранном расходе из условия интенсивности орошения  . Средняя интенсивность орошения определяется отношением
. Средняя интенсивность орошения определяется отношением  . Расход, участвующий непосредственно в орошении сканированием:
. Расход, участвующий непосредственно в орошении сканированием:
 .
.
Принимая  , получим
, получим  , что соответствует условию .
, что соответствует условию .
В дежурном режиме, см. фиг. 1, защищаемый объект находится под постоянным контролем извещателей 16. При возникновении очага загорания срабатывают извещатели 16, и приемно-контрольное устройство 15 выдает сигнал «Тревога» на блок управления процессом пожаротушения 20, который формирует информацию о зоне загорания на устройство управления 12, которое затем выдает управляющие сигналы по каналу связи 13 на соответствующие блоки коммутации 10 ПР 1, защищающих данную зону. Приводами вертикального и горизонтального наведения 4, 5 стволы 3 наводятся на сектор защищаемой зоны. От устройства обнаружения загорания и теленаблюдения 11 видео- и ИК-сигналы поступают по двухканальной телевизионной связи 18 на устройство обработки видеосигнала 17. После программной обработки поступившей информации устройство 17 производит идентификацию загорания, определяет его координаты, размеры в пространстве, и выдает информацию на блок управления процессом пожаротушения 19, который задает программу пожаротушения, в которой, в соответствии с требованиями нормативных документов, например ГОСТ Р 53326 п. 5.1.26, программирование ПР осуществляется путем регистрации координат двух взаимно диагональных точек растра построчного сканирования, определяющих площадь орошения  , равную площади растра
, равную площади растра  , и шага сканирования h, обеспечивающего равномерность орошения. Эта программа передается в устройство управления 12. Устройство 12 формирует управляющие сигналы по каналу связи 13 о координатах загорания на соответствующие блоки коммутации 10 РУП 1. Приводами вертикального и горизонтального наведения 4, 5 стволы 3 наводятся на очаг загорания, в это же время устройство управления 12 подает команду «запуск» и посылает технологические команды на запуск насосной, после чего подает команду на открытие дисковых затворов 8, на отработку программ пожаротушения. Пожаротушение производится строчными струями с пошаговым перемещением строк и с повторением циклов. На небольших расстояниях и для небольших зон достаточно использовать расширенный факел струи. Наведение стволов на очаг загорания контролируется по баллистическим данным струи в зависимости от угла наклона и давления. При тушении больших площадей увеличивается время цикла
, и шага сканирования h, обеспечивающего равномерность орошения. Эта программа передается в устройство управления 12. Устройство 12 формирует управляющие сигналы по каналу связи 13 о координатах загорания на соответствующие блоки коммутации 10 РУП 1. Приводами вертикального и горизонтального наведения 4, 5 стволы 3 наводятся на очаг загорания, в это же время устройство управления 12 подает команду «запуск» и посылает технологические команды на запуск насосной, после чего подает команду на открытие дисковых затворов 8, на отработку программ пожаротушения. Пожаротушение производится строчными струями с пошаговым перемещением строк и с повторением циклов. На небольших расстояниях и для небольших зон достаточно использовать расширенный факел струи. Наведение стволов на очаг загорания контролируется по баллистическим данным струи в зависимости от угла наклона и давления. При тушении больших площадей увеличивается время цикла  , уменьшается средняя интенсивность орошения
, уменьшается средняя интенсивность орошения  , что требует их контроля на соответствие нормативным параметрам. При
, что требует их контроля на соответствие нормативным параметрам. При  блок управления процессом пожаротушения 19 подает сигнал на включение в работу блока оптимизации и контроля параметров тушения 20 с программой коррекции тушения, который производит непрерывный расчет средней интенсивности орошения по данным текущей площади орошения и сравнивает ее с нормативной интенсивностью орошения по формуле
блок управления процессом пожаротушения 19 подает сигнал на включение в работу блока оптимизации и контроля параметров тушения 20 с программой коррекции тушения, который производит непрерывный расчет средней интенсивности орошения по данным текущей площади орошения и сравнивает ее с нормативной интенсивностью орошения по формуле  . Контролируется также длительность цикла выполнения программы растра сканирования Т, связанная отношением
. Контролируется также длительность цикла выполнения программы растра сканирования Т, связанная отношением  , где
, где  . На ближних дистанциях для орошения большой площади требуются большие угловые перемещения, и при постоянной угловой скорости 3 °/с, рекомендуемой на дальней дистанции, длительность цикла будет превосходить нормативно установленную. Поэтому в основу взята линейная скорость, которая определяется по формуле . Оптимальная скорость для заданной площади определится отношением
. На ближних дистанциях для орошения большой площади требуются большие угловые перемещения, и при постоянной угловой скорости 3 °/с, рекомендуемой на дальней дистанции, длительность цикла будет превосходить нормативно установленную. Поэтому в основу взята линейная скорость, которая определяется по формуле . Оптимальная скорость для заданной площади определится отношением  . Для соблюдения условия блок оптимизации и контроля параметров тушения 20 данные по оптимальной скорости переводит в угловые и передает информацию в блок управления процессом пожаротушения 19. Рассмотрим пример контроля соответствия длительности цикла выполнения программы растра сканирования Т нормативной длительности
. Для соблюдения условия блок оптимизации и контроля параметров тушения 20 данные по оптимальной скорости переводит в угловые и передает информацию в блок управления процессом пожаротушения 19. Рассмотрим пример контроля соответствия длительности цикла выполнения программы растра сканирования Т нормативной длительности  при расходе . Примем параметры растра сканирования, см. фиг. 2, соответствующими площади S=120 м2 с L=10 и Н=12 м с шагом сканирования h=3 м. Размер перемещения по вертикали уменьшится на величину h и будет составлять
при расходе . Примем параметры растра сканирования, см. фиг. 2, соответствующими площади S=120 м2 с L=10 и Н=12 м с шагом сканирования h=3 м. Размер перемещения по вертикали уменьшится на величину h и будет составлять  Суммарный путь сканирования
Суммарный путь сканирования  . Скорость сканирования для орошения предельно установленной площади орошения
. Скорость сканирования для орошения предельно установленной площади орошения  примем
примем  . Линейная скорость сканирования принимается неизменной, поэтому в зависимости от радиуса действия угловая скорость меняется и вычисляется по формуле
. Линейная скорость сканирования принимается неизменной, поэтому в зависимости от радиуса действия угловая скорость меняется и вычисляется по формуле  . Время цикла составит
. Время цикла составит  , тогда
, тогда 
Таким образом, все нормируемые базовые параметры соблюдены при оптимизированном расходе .
Предложенная роботизированная установка пожаротушения с системой оптимизации и контроля параметров тушения является эффективным автоматическим и дистанционно управляемым средством борьбы с пожарами, позволяющим направить мощный поток огнетушащего вещества непосредственно на очаг загорания, обнаруженный в ранней стадии, а также высвободить человека из опасных для жизни аварийных зон.
В отличие от известных, предложенная роботизированная установка пожаротушения имеет оптимизированную систему по параметрам тушения строчными струями с возможностью контроля соответствия базовых параметров тушения нормативным.
Эти отличительные особенности устройства позволяют значительно повысить эффективность тушения пожаров, уменьшить расход и, соответственно, количество используемого огнетушащего вещества, а также уменьшить ущерб от пожара, снизить затраты на строительство капитальных сооружений: насосных станций, электрических подстанций и сетей коммуникаций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ тушения пожаров роботизированными установками пожаротушения | 2023 |
|
RU2808270C1 |
| Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия | 2020 |
|
RU2751690C1 |
| Способ оценки эффективности тушения пожаров роботизированными установками пожаротушения | 2023 |
|
RU2827239C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС С ПОЛНОПРОЦЕССНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2010 |
|
RU2424837C1 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ МОДУЛЬНОГО ТИПА ПОВТОРНО-КРАТКОВРЕМЕННОГО ДЕЙСТВИЯ | 2022 |
|
RU2785398C1 |
| Многофункциональный робототехнический комплекс предупредительного мониторинга, обнаружения возгораний и управления пожаротушением производственных объектов | 2021 |
|
RU2775482C1 |
| Многофункциональный робототехнический комплекс противопожарной защиты производственных объектов на базе роботизированной установки пожаротушения и мобильного роботизированного комплекса | 2023 |
|
RU2814057C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС | 2005 |
|
RU2319530C2 |
| РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С СИСТЕМОЙ БЛИЦ-МОНИТОРИНГА | 2020 |
|
RU2739390C1 |
| Способ орошения несущих конструкций с контролем температуры нагрева на базе пожарных роботов | 2020 |
|
RU2758173C1 |
Изобретение относится к автоматизированной противопожарной технике. Техническим результатом является повышение эффективности тушения пожаров, уменьшение расхода и, соответственно, количества используемого огнетушащего вещества, а также уменьшение ущерба от пожара, и снижение затрат на строительство капитальных сооружений: насосных станций, электрических подстанций и сетей коммуникаций. Предложена роботизированная установка пожаротушения с системой оптимизации и контроля параметров тушения, содержащая два и более пожарных робота, включающих в себя лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания струи, дисковый затвор, датчик давления и местный пульт управления, соединенные с блоком коммутации на входе, а на его выходе - с устройством управления, установленное на стволе устройство обнаружения загорания и теленаблюдения, соединенное с устройством цифровой обработки сигнала в ИК-диапазоне, соединенным с видеоконтрольным устройством и устройством управления, которое также соединено с пожарными извещателями, блок управления процессом пожаротушения с программой тушения строчными струями с параметрами: площадь орошения  , шаг сканирования h, угловая скорость сканирования w, соединенный на входе с приемно-контрольным устройством и устройством цифровой обработки сигнала в ИК-диапазоне, а на выходе - с устройством управления. Дополнительно содержится блок оптимизации и контроля параметров тушения с программой коррекции тушения, в базу данных которой включаются взаимосвязанные параметры, оптимизирующие и контролирующие пожаротушение:
, шаг сканирования h, угловая скорость сканирования w, соединенный на входе с приемно-контрольным устройством и устройством цифровой обработки сигнала в ИК-диапазоне, а на выходе - с устройством управления. Дополнительно содержится блок оптимизации и контроля параметров тушения с программой коррекции тушения, в базу данных которой включаются взаимосвязанные параметры, оптимизирующие и контролирующие пожаротушение:  – номинальный расход пожарного робота,
– номинальный расход пожарного робота,  - средняя интенсивность орошения при строчном сканировании, и Т - длительность цикла выполнения программы растра сканирования. 4 ил.
- средняя интенсивность орошения при строчном сканировании, и Т - длительность цикла выполнения программы растра сканирования. 4 ил.
Роботизированная установка пожаротушения с системой оптимизации и контроля параметров тушения, содержащая два и более пожарных робота, включающих в себя лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания струи, дисковый затвор с приводом, датчик давления и местный пульт управления, соединенные с блоком коммутации на входе, а на его выходе - с устройством управления, в котором формируются управляющие команды по наведению ствола и пожаротушению, установленное на стволе устройство обнаружения загорания и теленаблюдения, соединенное с устройством цифровой обработки сигнала в ИК-диапазоне, в котором программно реализуются алгоритмы определения координат очага загорания, соединенное с видеоконтрольным устройством и устройством управления, которое также соединено с пожарными извещателями, блок управления процессом пожаротушения с программой тушения строчными струями с параметрами: площадь орошения Sор, равная площади сканирования в растре Sор=L×H, где L длина строки растра сканирования, а H высота растра сканирования, шаг сканирования h, угловая скорость сканирования w, соединенный на входе с приемно-контрольным устройством и устройством цифровой обработки сигнала в ИК-диапазоне, а на выходе - с устройством управления, отличающаяся тем, что в устройстве к блоку управления процессом пожаротушения дополнительно подключается блок оптимизации и контроля параметров тушения с программой коррекции тушения, в базу данных которой включаются взаимосвязанные параметры, оптимизирующие и контролирующие пожаротушение:
Q н – номинальный расход пожарного робота, определяемый по формуле Qн ≥ Qo= Qмин × Kпп × Kпн, где Qo – оптимизированный расход, Kпп – коэффициент, учитывающий потери при подаче ОТВ, Kпн – коэффициент, учитывающий погрешности наведения струи, а Qмин – расход на площади Sор = Sмин, определяемый по формуле Qмин = iн × Sмин, где iн - нормативная интенсивность орошения на минимальной площади Sмин;
i ср - средняя интенсивность орошения при строчном сканировании, связанная отношением iср = Qор / Sор ≥ iн, где Qор – расход на орошаемой площади Sор, определяемый по формуле Qор = Qн / (Кпп × Кпн);
Т - длительность цикла выполнения программы растра сканирования, связанная отношением Т = Lр × v < Tн, где Тн – установленный предел длительности цикла, а Lр = n × L + 2H - суммарная длина строк (дуг окружности) и шагов растра сканирования, где n = H / h - число строк сканирования, а h = a, где a - длина зоны максимальной интенсивности в месте контакта стационарной струи с поверхностью с интенсивностью iмз ≥ 20iн, v - линейная скорость перемещения, связанная отношением v = 2πRэ / 360 × w, где Rэ - эффективный радиус сканирования, определяемый дальностью струи до точки максимальной интенсивности iмт.
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС С ПОЛНОПРОЦЕССНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2010 |
|
RU2424837C1 |
| Автоматическая система пожаротушения | 1976 |
|
SU735155A3 |
| Двигатель внутреннего горения с косой качающейся шайбой | 1940 |
|
SU63692A1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС | 2005 |
|
RU2319530C2 |
| СИСТЕМА ПОЖАРОТУШЕНИЯ | 2000 |
|
RU2179871C2 |
| KR 1019990064937 A, 05.08.1999. | |||

