Изобретение относится к постоянному держателю для перемещающихся грузов, в частности трубопроводов и т.п., содержащему крепежную часть, грузонесущую часть и расположенную между крепежной и грузонесущей частями пружинную систему для создания несущего усилия, остающегося постоянным по несущему пути грузонесущей части относительно крепежной части, причем пружинная система содержит воспринимающий груз амортизатор, компенсирующее устройство для компенсации изменяющихся пружинных усилий по несущему пути и натяжное устройство для регулирования усилия натяжения амортизатора.
Постоянным держателем может быть, например, постоянная подвеска для подвешивания груза или постоянная опора для его поддержания. Постоянный держатель описанного выше рода описан, например, в DE 102005045736 и PCT/DE 2006/001678 или в виде постоянной подвески в DE 8806433 U1 и FR 2286330 А1. При этом предусмотрены компенсирующие устройства в виде дополнительных амортизаторов и/или кулачков, с помощью которых отклонение главной пружины от теоретически линейной характеристики усилие пружины-ход пружины можно компенсировать, например, за счет ввода дополнительных усилий посредством дополнительного амортизатора и/или кулачков.
В US 2924411 А1 описан, например, постоянный держатель с компенсирующим устройством, содержащим выполненный в виде кулачкового диска кулачок, по периферии которого грузоподъемный канат с подвешенным грузом движется по несущему пути. Кулачковый диск жестко соединен с круговым диском, на который воздействует канат для передачи созданного амортизатором тягового усилия. Предусмотрено определенное настроенное положение кулачкового диска, на которое он рассчитан. При изменении натяжения амортизатора происходит отклонение кулачкового диска из настроенного положения. Посредством регулировочного устройства можно для достижения настроенного положения изменять за счет вращения положение кулачкового диска относительно кругового диска, что является сложным и трудоемким делом. При настройке не учтено, что если установленное натяжение амортизатора изменяется, то это оказывает одновременно влияние на все его поведение. При этом, несмотря на регулирование компенсирующего устройства, возникают другие отклонения от желаемой постоянной характеристики «несущее усилие-несущий путь», поскольку отклонения от теоретически линейной характеристики «усилие пружины-ход пружины» с изменением натяжения в диапазоны более высоких или более низких усилий оказываются иными, нежели в диапазоне первоначально предварительно установленного усилия натяжения, на которое, однако, рассчитан контур кулачкового диска.
В DE 10104661 А1 описан выполненный в виде постоянной подвески постоянный держатель, содержащий главный амортизатор с винтовой пружиной сжатия и дополнительный амортизатор с плоской пружиной для компенсации отклонений усилия пружины главного амортизатора от теоретически линейной характеристики «усилие пружины-ход пружины», причем натяжение главного и дополнительного амортизаторов регулируется отдельно.
В FR 2000305 А раскрыт выполненный в виде рычажного держателя постоянный амортизатор, содержащий пружинное устройство с винтовой пружиной сжатия и рычажное устройство с силовым плечом и нагрузочным плечом, причем последнее способствует минимизации оказываемого на подвешенный груз крутящего момента.
Если установленное натяжение амортизатора изменяется, то это оказывает одновременно влияние на все его поведение. Несмотря на компенсирующее устройство, это приводит к отклонениям от желаемой постоянной характеристики «несущее усилие-несущий путь», которые больше не отвечают требованиям к отклонению несущего усилия в этой характеристике в несколько процентов. Это может, в свою очередь, потребовать, например, принятия мер, чтобы встроить в постоянный держатель кулачок, другого геометрического размера и/или измененный дополнительный амортизатор, что является сложным делом, требует привлечения квалифицированного механика и, как правило, почти не может быть осуществлено на месте.
В основе изобретения лежит задача создания постоянного держателя описанного выше рода с возможностью корректировки компенсирующего устройства, посредством которого при изменении натяжения в диапазоны более высоких или более низких усилий компенсируются возникающие за счет этого измененного натяжения по несущему пути отклонения от теоретически линейной характеристики «усилие пружины-ход пружины», как и отклонения от теоретически линейной характеристики «усилие пружины-ход пружины», возникающие в диапазоне первоначально предварительно установленного усилия натяжения по несущему пути без необходимости замены конструктивных элементов. Кроме того, эти корректировки должны производиться просто и недорого.
Поставленная задача решается согласно изобретению посредством признаков отличительной части п.1 формулы. За счет корректирующего устройства можно, тем самым, корректировать отклонения от желаемой постоянной характеристики «несущее усилие-несущий путь» вследствие изменения усилия натяжения без необходимости замены, например, конструктивного элемента компенсирующего устройства, так что натяжение постоянного держателя можно согласовать на месте с условиями нагрузки, которые фактически возникают в отличие от ожидаемых и/или расчетных.
Преимущественно корректирующее устройство интегрировано в постоянный держатель. Корректирующее устройство может быть расположено внутри корпуса. За счет этого можно сохранить желаемую компактную конструкцию. Корректирующее устройство может быть выполнено с возможностью воздействия непосредственно на амортизатор. Для этого может быть предусмотрено подключение корректирующих пружинных элементов, что, однако, усложнило бы корректирующее устройство. Поэтому преимущественно предусмотрено, что корректирующее устройство в виде изменения расположения пружин воздействует непосредственно на амортизатор. Это изменение относится предпочтительно к пространственной ориентации одной или нескольких пружин амортизатора, вследствие чего характеристика передаваемого пружинного усилия или соответственно несущего усилия за счет характеристики несущего пути может корректироваться соответственно изменившемуся натяжению.
Предпочтительным образом может быть предусмотрено, что корректирующее устройство связано, предпочтительно непосредственно связано, с натяжным устройством. Это означает, что регулировка натяжения и корректировка посредством корректирующего устройства может осуществляться за одну рабочую операцию. Предпочтительно корректировка осуществляется автоматически с изменения усилия натяжения, предпочтительно посредством корректирующего устройства.
В одном усовершенствовании постоянного держателя компенсирующее устройство может иметь связанный с грузонесущей частью кулачок. Амортизатор может содержать, по меньшей мере, одну пружину, в частности пружину сжатия, которая силовой стороной опирается в силовой точке на крепежную часть, а для передачи усилия с амортизатора на грузонесущую часть воздействует нагрузочной стороной в нагрузочной точке на кулачок. В соответствии с изобретением, нагрузочная точка и/или силовая точка для корректировки отклонений несущего усилия по несущему пути вследствие измененного усилия натяжения расположена с возможностью изменения положения относительно кулачка и по пути регулирования с составляющей пути, перпендикулярной оси соответствующей пружины, и в одной плоскости с несущим усилием или параллельно ему. При этом возможность изменения положения предпочтительно относится к кулачку и/или крепежной части. Целесообразным образом нагрузочная точка и/или силовая точка выполнена с возможностью фиксации в определенном корректированном положении. Это может осуществляться, например, посредством зажимания или закрепления соответствующей точки или посредством опирания (подпирания) соответствующей точки. Корректировка может осуществляться на одной или нескольких пружинах дополнительного амортизатора и/или главного амортизатора.
Пружина предпочтительно выполнена в виде пружины сжатия. Предварительно регулирование натяжения, как подробно описано ниже, а также в DE 10 2005 045 736 и в PCT/DE2006/001678, может осуществляться посредством аксиального сжимания или ослабления пружин с одного своего конца. Отсюда раскрытое содержание публикаций DE 10 2005 045 736 и PCT/DE2006/001678 относительно предварительного регулирования напряжения включено в раскрытие настоящей заявки. Как упомянуто вначале, с изменением удлинения или укорачивания длины пружины одновременно изменяется характеристика пружины за счет характеристики "несущее усилие - несущий путь". Согласно изобретению для корректировки дополнительно предусмотрено смещение перемещение) нагрузочной точки перпендикулярно оси пружины, вследствие чего геометрия усилий, которая вытекает в несущее усилие, может изменяться так, что несмотря на измененное усилие натяжения может быть обеспечено постоянство несущего усилия на несущем пути в пределах малого диапазона допусков в несколько процентов.
Как также описано в DE 102005045736 и PCT/DE 2006/001678 и ЕР 0 306 786 А1, нагрузочная точка, например, посредством роликовой опоры или опоры скольжения за счет кулачковой боковой поверхности кулачка на несущем пути может быть расположена подвижно относительно кулачка и/или за счет наложения поворотно подвижно относительно кулачка. За счет соответствующего изобретению корректирующего устройства может производиться смещение по положению нагрузочной точки, которое накладывает свое движение относительно кулачка в каждой точке. Таким образом, нагрузочная точка может регулироваться с опережением или запаздыванием относительно своей первоначальной регулировки положения.
Предпочтительным образом корректирующее устройство имеет направляющую для нагрузочной точки и/или силовой точки одной или нескольких пружин. При этом может быть предусмотрено, что нагрузочная точка и/или силовая точка для своего регулирования расположена с возможностью перемещения в направляющей по направляющему пути с по меньшей мере одной составляющей пути, перпендикулярной продольной оси пружины, и в одной плоскости с несущим усилием. Предпочтительным образом нагрузочная точка и/или силовая точка с возможностью перемещения в направлении несущего усилия или навстречу ему. За счет этого уже возможно изменение натяжения соответствующей пружины. Дополнительно может быть предусмотрено перемещение с составляющей пути по продольной оси пружины, что обеспечивает дальнейшее изменение натяжения пружины. Целесообразно нагрузочная и/или силовая точка могут фиксироваться с силовым и/или с геометрическим замыканием в нужном корректированном положении в направляющей относительно кулачка. Таким образом, корректирующее устройство может корректировать отклонение несущего усилия по несущему пути при изменении нагрузки за счет изменения наклона пружины и, тем самым, передаваемого пружиной на кулачок или на компенсирующее устройство усилия по его величине и/или направлению.
Вместо одной отдельной пружины может быть предусмотрено также несколько пружин, которые воздействуют на общую нагрузочную точку и, тем самым, по отношению к нагрузочной точке действуют в качестве одной общей пружины. Таким образом, усилия отдельных пружин могут векторно суммироваться по отношению к нагрузочной точке в одно общее пружинное усилие, так что при желаемых больших общих пружинных усилиях габариты постоянного держателя могут поддерживаться небольшими. Преимущественно оси отдельных пружин расположены параллельно друг другу. Пружины могут быть расположены также коаксиально друг другу. Отдельные или все расположенные параллельно друг другу пружины могут содержать дополнительно по одной или несколько коаксиально расположенных пружин. Для этого могут быть предусмотрены, например, две пружины, расположенные коаксиально друг другу и/или рядом друг с другом.
Преимущественно амортизатор может содержать две пружины, в частности две пружины сжатия. Эти пружины сжатия могут быть расположены друг против друга симметрично несущему усилию. При этом оси пружин или пружин сжатия в основном положении могут быть расположены с наклоном друг к другу под углом меньше или больше 180°. В основном положении пружины могут быть расположены с составляющей пути против несущего усилия или в направлении несущего усилия навстречу друг другу. В основном положении пружины расположены преимущественно на одном общей оси. Для этого пружины сжатия своей нагрузочной стороной в соответствующей им нагрузочной точке воздействуют на кулачок или на соответствующий им кулачок. За счет этого, как подробно описано в DE 102005045736 А1 и PCT/DE 2006/001678, на которые здесь приведена ссылка, предложена симметричная силовая система, которая позволяет передавать на кулачок относительно большие усилия, определенная часть которых действует в направлении несущего усилия. Вследствие симметричного расположения пружин также вся конструкция постоянной подвески может быть зеркально-симметричной с плоскостью зеркальной симметрии перпендикулярно плоскости, которая проходит в направлении несущего усилия и параллельно осям пружин. Таким образом, основное положение может соответствовать положению, в котором кулачок на заводе может быть согласован с определенным натяжением. При этом может быть предусмотрено, что корректирующее устройство оказывает корректирующее действие с измененным натяжением, при котором нагрузочная точка перемещается относительно кулачка, как это подробно описано ниже.
Как уже сказано, может быть предусмотрен дополнительный амортизатор для компенсации ошибки пружины при изменении ее нагрузки. При этом дополнительный амортизатор и амортизатор, называемый в уровне техники главным амортизатором, могут быть расположены горизонтально и параллельно друг другу. Для каждого амортизатора может быть предусмотрена пара пружин сжатия.
Предпочтительно обе пружины сжатия одной пары расположены в основном положении на одной оси, причем компенсирующее устройство, т.е. соответствующие кулачки или кулачковые рычаги, расположены между пружинами сжатия. В своем основном положении пружины сжатия могут, тем самым, воздействовать навстречу друг другу на кулачок или кулачки. Кулачок имеет преимущественно для каждой пружины сжатия соответствующую кулачковую боковую поверхность, причем они могут быть расположены на одном общем кулачке или на соответствующем кулачке, в частности кулачковом рычаге. В частности, в отношении кулачкового рычага в публикации PCT/DE 2006/001678 подробно описаны силовые симметрии, причем ее содержание, в частности в отношении расположения пружин и передачи усилия с кулачка на грузонесущую часть, расположения и выполнения кулачков в виде кулачковых рычагов, включены в содержание данной заявки.
В DE 102005045736 А1 описано другое расположение пружин, где параллельно главному амортизатору предусмотрен дополнительный амортизатор, воздействующий через кулачки на грузонесущую часть. Здесь нагрузочная и/или силовая точка одной или нескольких дополнительных и/или главных пружин могут быть расположены в направляющей с возможностью перемещения.
В одном предпочтительном варианте кулачок может содержать по меньшей мере один выполненный в виде кулачкового рычага и установленный на крепежной части в поворотном шарнире рычаг с двумя противоположными друг другу боковыми поверхностями в его продольной протяженности. Преимущественно пружина своей нагрузочной стороной на одном участке обращенной к ней первой боковой поверхности или на обращенной к ней боковой поверхности установлена предпочтительно с возможностью поворота или предпочтительно опирается на нее. Вторая боковая поверхность может быть выполнена в виде кулачковой боковой поверхности, к которой с возможностью перемещения или обката прилегает грузонесущая часть. Таким образом, за счет расстояния между поворотным шарниром или осью поворота кулачкового рычага на крепежной части и преимущественно поворотной установкой пружины на первой боковой поверхности можно образовать силовое плечо. Соответственно за счет расстояния между поворотным шарниром или осью поворота кулачкового рычага и нагрузочной точкой или участком, на котором грузонесущая часть прилегает с возможностью перемещения или обката к кулачковому рычагу, можно образовать нагрузочное плечо. За счет изменения нагрузочного и/или силового плеча, предпочтительно в основном положении, по направлению и/или длине могут осуществляться корректировка и дополнительно изменение натяжения соответствующей пружины. С изменением положения нагрузочной точки в направляющей силовое плечо может изменяться по своей ориентации относительно грузонесущей части и/или по своей длине.
Грузонесущая часть может содержать нагрузочный ролик с осью вращения перпендикулярно оси пружины и направлению несущего усилия. Преимущественно предусмотрено, что кулачковая боковая поверхность прилегает в перпендикулярной оси вращения плоскости к нагрузочному ролику с возможностью обката. Таким образом, за счет обката может происходить изменение нагрузочного плеча. За счет профилирования кулачковой боковой поверхности можно осуществлять компенсацию ошибки пружины по ходу пружины. В случае нескольких пружин, воздействующих на кулачок по отдельности, каждой пружине может быть придан кулачковый рычаг с кулачковой боковой поверхностью. При этом грузонесущая часть через нагрузочные ролики может воздействовать на кулачковую боковую поверхность соответствующего кулачкового рычага. Нагрузочные ролики, в свою очередь, могут быть расположены на общей оси вращения, выполненной в виде оси нагрузочного ролика и установленной на крепежной части. За счет надетых на нагрузочные ролики втулок нагрузочные ролики могут отстоять друг от друга и от корпуса. Грузонесущая часть может содержать далее груэонесущие серьги с ограничивающей несущий путь направляющей прорезью, через которую проходит грузонесущая ось. В отношении выполнения кулачка или кулачковых роликов, грузонесущей части и расположения нагрузочных роликов также дана ссылка на публикацию PCT/DE 2006/001678, содержание которой включено в данную заявку.
Кроме того, кулачковая боковая поверхность может прилегать к грузонесущей части, перемещающейся при перемещении грузонесущей части по несущему пути точкой или участком, которая/который изменяющимся по несущему пути значением указывает в направлении несущего усилия. За счет этого ориентация или отклонение введенного усилия пружины может происходить так, что на грузонесущую часть в направлении несущего усилия может всегда передаваться силовая составляющая и, тем самым, всегда образовано необходимое несущее усилие.
В одной предпочтительной модификации постоянного держателя кулачок может быть выполнен плоским с одной большей боковой поверхностью. Кроме того, кулачок может быть установлен в поворотной опоре вокруг оси поворота, перпендикулярной его большей боковой поверхности, а также перпендикулярной продольной оси пружины и несущему пути на крепежной части постоянного держателя. Предпочтительно направляющая интегрирована в кулачок на расстоянии от поворотной опоры. За счет этого создана простая конструкция, поскольку с интеграцией направляющей в кулачок не требуется никаких новых конструктивных элементов для удержания направляющей.
Преимущественно направляющая имеет паз или прорезь для размещения и направления нагрузочной точки. Такое выполнение особенно просто интегрируется в плоский кулачок. При этом паз аналогично кулачковым боковым поверхностям может иметь криволинейный контур, который, в том числе, может возникать из изменения усилий пружин в зависимости от характеристики «несущее усилие-несущий путь» и измененной или смещенной за счет измененного натяжения характеристики амортизатора.
Преимущественно паз выполнен в своей продольной протяженности линейным, так что нагрузочная точка может направляться в направляющей линейно. Для этого паз в своей продольной протяженности и силовое плечо могут заключать между собой корректирующий угол, который преимущественно больше 0°. Ориентация паза может регулироваться посредством соответствующего устройства. Для этого участок кулачка с пазом может быть расположен, например, с возможностью вращения вокруг оси, перпендикулярной продольной протяженности паза, и с возможностью фиксации в определенном положении вращения, например, посредством зажимного устройства. Предпочтительно, однако, паз прочно интегрирован в кулачок.
Идеальный или оптимальный на практике корректирующий угол зависит, в том числе, от геометрического размера компенсирующего устройства и характеристик амортизатора, а также от предварительно установленного натяжения амортизатора в основном положении.
Для более легкого перемещения нагрузочной точки в направляющей пружина своей силовой стороной может быть расположена на крепежной части с возможностью поворота. За счет этого с перемещением нагрузочной точки возможен поворот пружины. Этот поворот может быть, однако, относительно небольшим. Преимущественно в качестве пружин предусмотрены винтовые пружины и, в частности, в случае использования постоянного держателя в качестве постоянной подвески - винтовые пружины сжатия. Для снижения издержек производства в качестве альтернативы может быть предусмотрено, что пружины своей силовой стороной расположены на крепежной части не посредством поворотной опоры и что компенсация при перемещении нагрузочной точки в направляющей относительно крепежной части происходит за счет упругой деформации и/или наклона пружины.
Целесообразно нагрузочная точка пружины в основном положении может быть расположена по отношению к продольной протяженности паза посередине в пазу. За счет этого в пределах определенного, зависимого в том числе от длины паза, диапазона возможно уменьшение или увеличение предварительно установленного натяжения.
Как уже сказано, нагрузочная точка может фиксироваться в определенном корректированном положении в направляющей или в пазу. Преимущественно или дополнительно может быть предусмотрено, что нагрузочная точка в направляющей опирается на кулачок посредством удерживающего устройства. Например, может использоваться линейный привод с механическим регулированием или регулированием от электродвигателя, который может перемещать нагрузочную точку в направляющей и блокировать ее перемещение в определенном положении.
Преимущественно для каждой пружины могут быть предусмотрены два кулачковых рычага с пазами для направления нагрузочных точек пружин. Оба кулачковых рычага могут быть расположены на крепежной части параллельно на расстоянии друг от друга и по одной прямой с несущим усилием, а также перпендикулярно или приблизительно перпендикулярно оси пружины и с возможностью поворота на общей поворотном валике. Для этого, как описано в публикации PCT/DE 2006/001678, на которую дана ссылка, на поворотном валике могут быть предусмотрены распорки, преимущественно в виде надетых на него втулок, которые могут быть расположены между кулачковыми рычагами, дистанцируя их друг от друга.
Целесообразно каждая пружина своей нагрузочной точкой может опираться посередине на первый поперечный элемент в виде поперечной колодки, поперечной подпорки или предпочтительно в виде поперечного пальца, который направляющим концом установлен в одной из направляющих в кулачковых рычагах с возможностью перемещения и преимущественно без проворачивания. Для этого направляющий конец с двух противоположных сторон с образованием заплечика и двух параллельных направляющих боковых поверхностей может быть выполнен с лысками. Таким образом, направляющий конец может прилегать к внутренним боковым поверхностям соответствующей направляющей без проворачивания и с возможностью перемещения. Предпочтительно направляющий конец проходит через паз и на небольшую величину выступает за боковую поверхность, в которой выполнен паз. Для ограничения направляющего пути предпочтительно по продольной оси пазов могут быть предусмотрены изменяемые по положению упоры. Преимущественно направляющие концы упираются одной стороной в пазы. Преимущественно в торцевой стороне, по меньшей мере, одного направляющего конца поперечного пальца выполнена маркировка, которая указывает преимущественно геометрическую середину торцевой стороны по отношению к продольной оси паза. Маркировка может отличаться от своего окружения, например, по цвету. Преимущественно маркировка может иметь насечку или канавку, причем насечка или канавка проходит целесообразно перпендикулярно направляющим боковым поверхностям. Насечка или канавка может иметь круглое или криволинейное сечение. Преимущественно сечение выполнено так, что оно образует среднюю продольную линию. Предпочтительно V-образное сечение. Сбоку от паза, примыкая к нему, может быть предусмотрена шкала для указания направляющего пути направляющего конца в пазу. Предпочтительно шкала выполнена в виде шкалы нагрузки с разметкой в единицах силы, преимущественно в килоньютонах (кН) и/или в фунтах (lps). Для рассмотрения паза и/или шкалы на высоте, по меньшей мере, одного паза в корпусе постоянного держателя может быть выполнено окошко.
Для поддержания поперечного пальца между кулачковыми рычагами может быть расположен второй поперечный элемент в виде поперечного пальца, поперечной подпорки и т.п., предпочтительно в виде поперечной колодки. Она может быть расположена целесообразно параллельно и дистанцировано от продольной оси паза и соединена своими концами с кулачковыми рычагами. Поперечный палец может быть соединен с поперечной колодкой посредством установленного посередине в ней с возможностью вращения ходового винта, проходящего через первое сквозное отверстие с внутренней резьбой, с которой в зацеплении находится ходовой винт. Вращая винт, можно перемещать установленный в пазах своими направляющими концами без проворачивания поперечный палец в пазах в их продольной протяженности. Преимущественно поперечный палец имеет круглое сечение за исключением его выполненных с лысками направляющих концов.
Поперечная колодка может целесообразно иметь по существу прямоугольное сечение, причем ходовой винт проходит в поперечной колодке преимущественно с обращенной к поперечному пальцу боковой поверхности через второе сквозное отверстие и установлен в нем с возможностью свободного вращения, т.е. без резьбового зацепления. Посредством блокировочного элемента, преимущественно законтренной и прилегающей к боковой поверхности гайки, ходовой винт и, тем самым, поперечный палец с нагрузочным концом пружины могут опираться на поперечную колодку и, тем самым, на кулачки или кулачковые рычаги. Поперечная колодка преимущественно посредством вставного соединения соединена с кулачками преимущественно без закрепления. Таким образом, удерживающее устройство может легко монтироваться и демонтироваться.
В положении монтажа поперечная колодка может быть расположена целесообразно с нижней стороны поперечного пальца, ходовой винт регулировочным концом может проходить через поперечную колодку, а на регулировочном конце может быть расположена головка винта с преимущественно обычным выполнением для вращения винта. Таким образом, корректирующее устройство или ходовой винт в положении монтажа в случае выполненного в виде постоянной подвески постоянного держателя может без труда приводиться в действие снизу обычным инструментом, таким как торцовый ключ или ключ с внутренним шестигранником.
Натяжное устройство может содержать регулировочное устройство для предварительной установки усилия натяжения. Оно может быть выполнено также или аналогично описанному в публикациях DE 102005045736 и PCT/DE 2006/001678, на которые здесь дана ссылка. Благодаря предложенному корректирующему устройству предварительная установка усилия натяжения, согласованная со второй кулачковой боковой поверхностью, может осуществляться, например, на заводе и может быть опечатана или блокирована так, чтобы нельзя было случайно изменить предварительную установку.
Для этого, как подробно описано в публикациях DE 102005045736 и PCT/DE 2006/001678, пружина со стороны закрепления может быть расположена в крепежной опоре и/или со стороны нагрузки - в нагрузочной опоре, причем крепежная и/или нагрузочная опора могут перемещаться и фиксироваться в направлении оси пружины. Для надежного опирания пружины опоры могут содержать соответственно опорный диск, на который торцевой стороной опирается соответствующая пружина и который посредством резьбового устройства может перемещаться в направлении ее оси. В частности, нагрузочная опора может содержать выполненную в виде натяжной стенки боковую стенку корпуса, на которую со стороны закрепления опирается пружина и которая для предварительной установки натяжения может перемещаться и фиксироваться в направлении оси пружины.
Изобретение более подробно поясняется ниже на примере его осуществления, изображенного на чертежах, на которых
фиг.1: перспективный вид постоянного держателя, причем отсутствуют части корпуса;
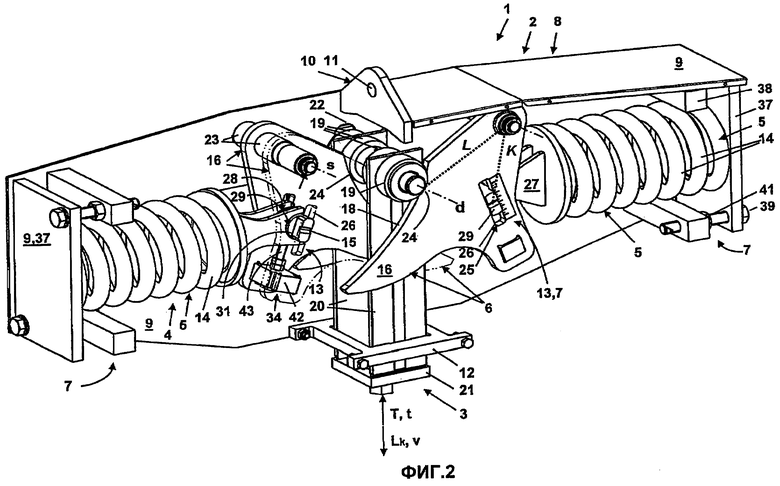
фиг.2: перспективный вид постоянного держателя из фиг.1, причем отсутствует передний кулачковый рычаг;
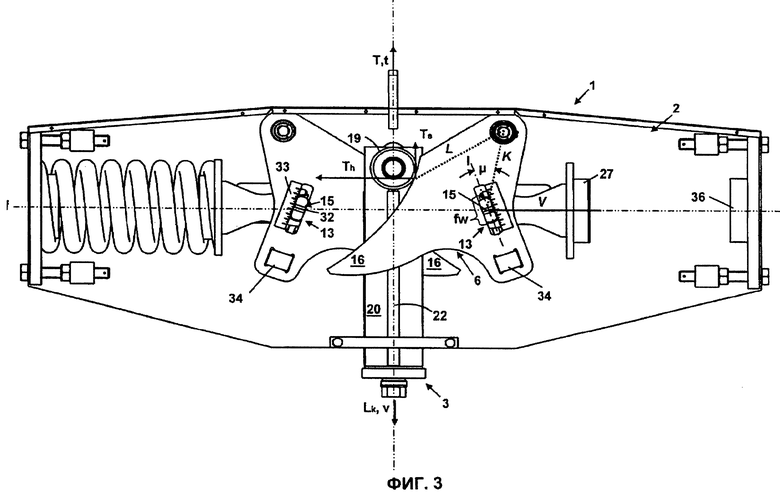
фиг.3: вид сбоку постоянного держателя в основном положении со средним несущим усилием, причем отсутствует правая пружина пружинной системы;
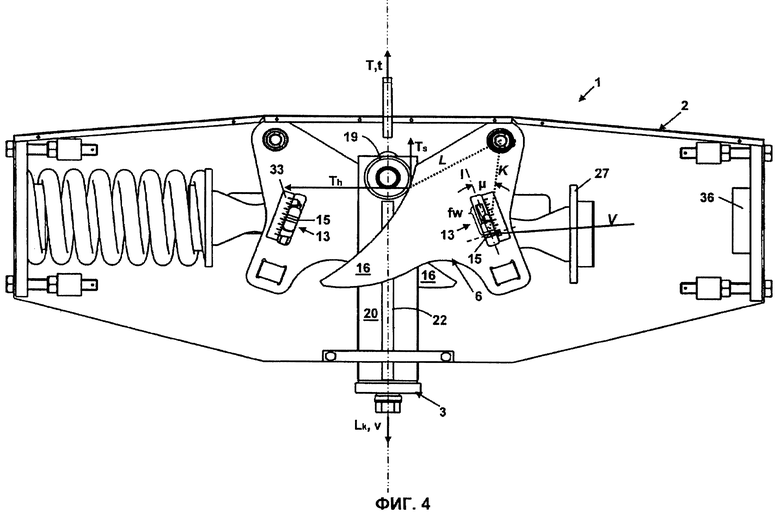
фиг.4: вид сбоку постоянного держателя из фиг.3 с максимальным несущим усилием;
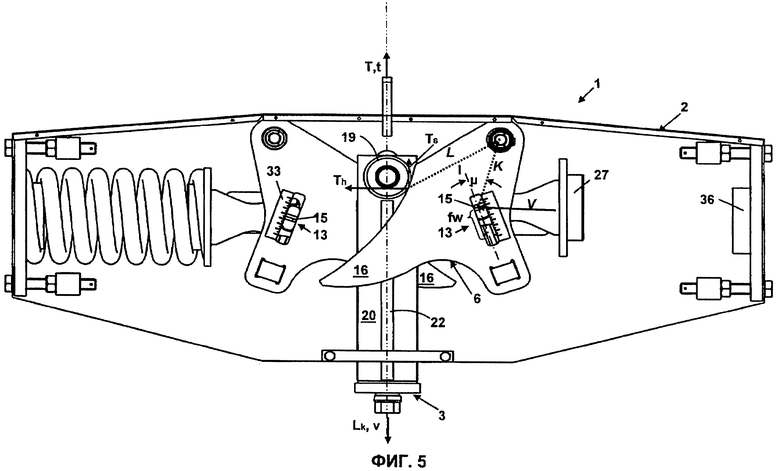
фиг.5: вид сбоку постоянного держателя из фиг.3 с минимальным несущим усилием;
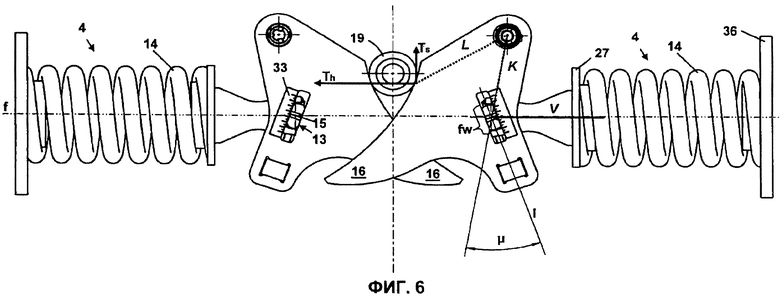
фиг.6: вид сбоку пружинной системы постоянного держателя;
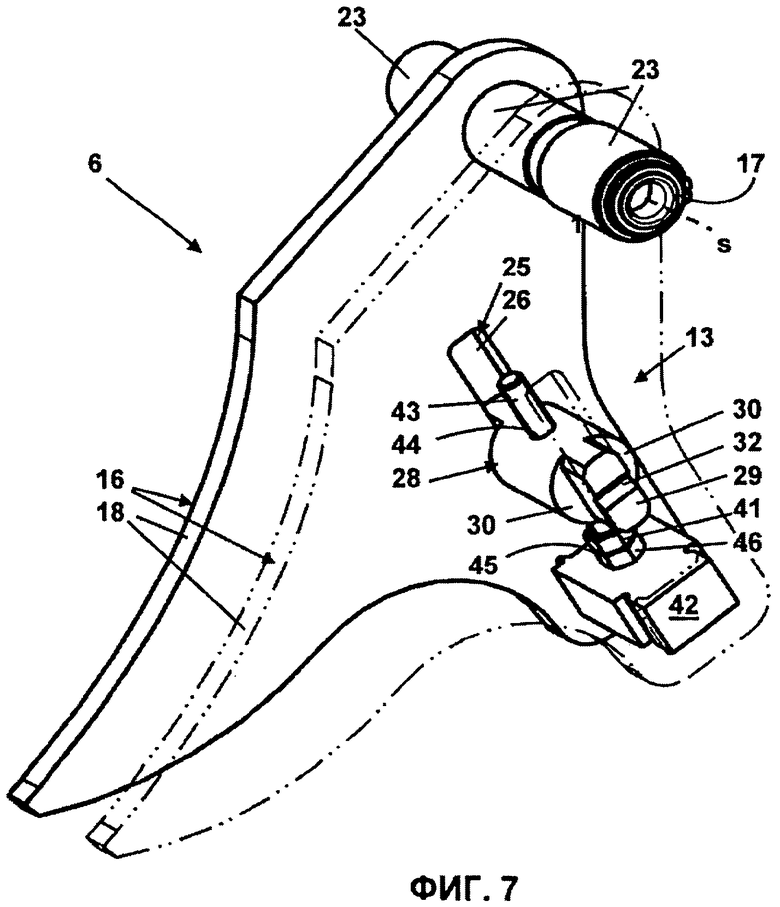
фиг.7: перспективный вид пары кулачковых рычагов пружинной системы;
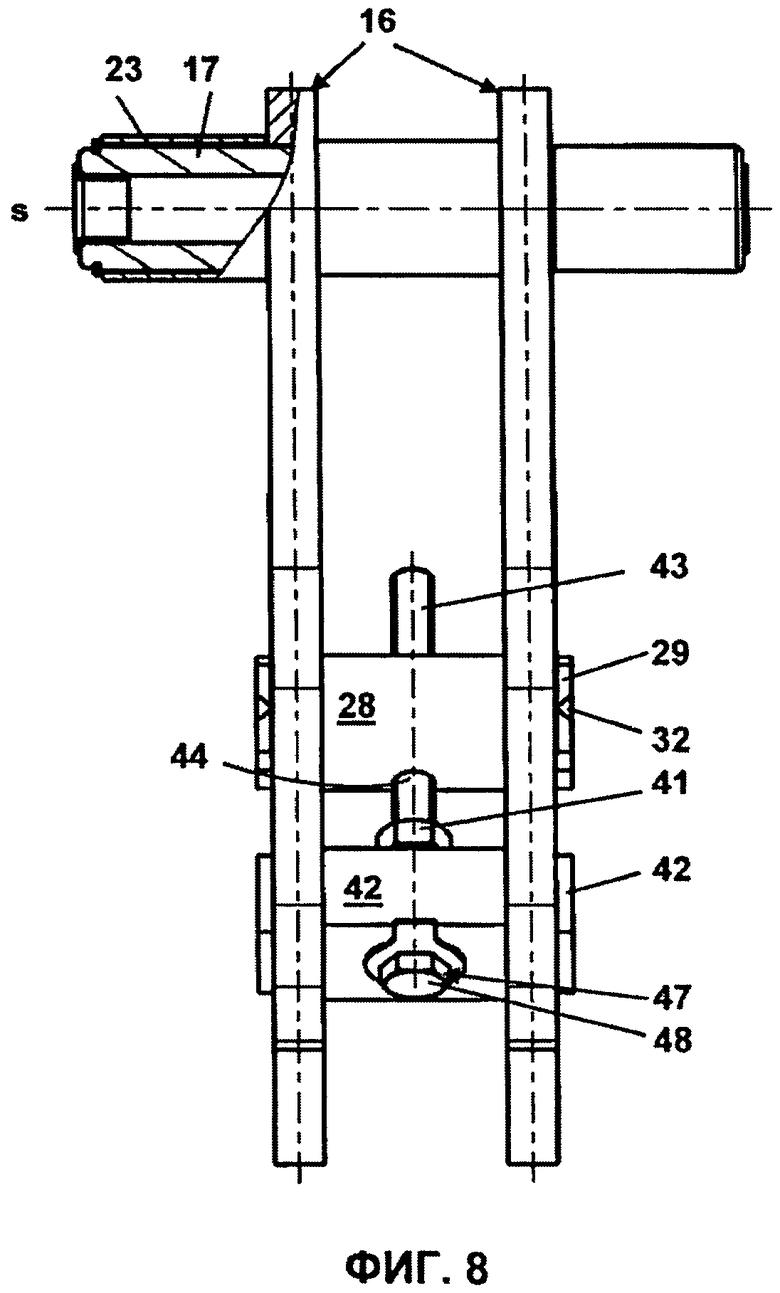
фиг.8: вид снизу пары кулачковых рычагов из фиг.7;
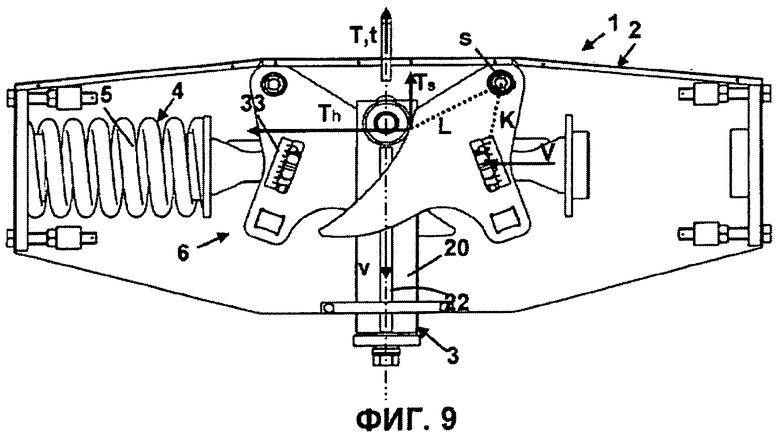
фиг.9: вид сбоку постоянного держателя из фиг.3 в верхнем положении перемещения;
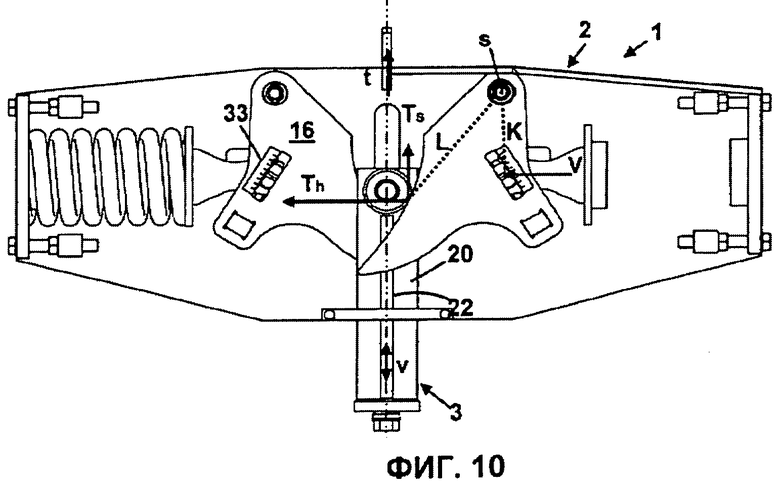
фиг.10: вид сбоку постоянного держателя из фиг.9 в среднем положении перемещения;
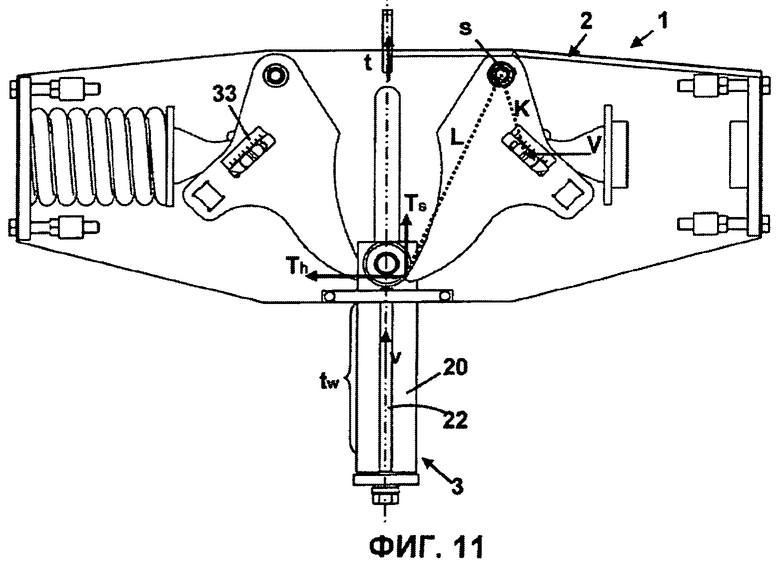
фиг.11: вид сбоку постоянного держателя из фиг.9 в нижнем положении перемещения;
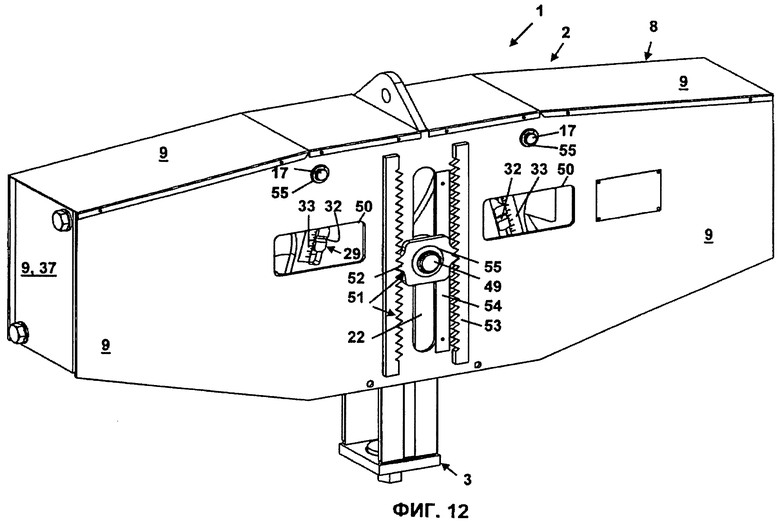
фиг.12: перспективный вид сбоку постоянного держателя с передней боковой стенкой корпуса и вставленным транспортным предохранителем.
На фиг.1-12 постоянный держатель 1 и его части изображены в разных видах, причем в данном примере держатель 1 рассчитан на подвешиваемый груз (не показан) и тем самым служит в качестве постоянной подвески.
Держатель 1 для перемещающегося груза, в частности трубопровода (не показан) и т.п., содержит крепежную часть 2, грузонесущую часть 3 и расположенную между ними пружинную систему 4 для создания несущего усилия Т, остающегося постоянным по несущему пути tw грузонесущей части 3 относительно крепежной части 2. Пружинная система 4 включает в себя воспринимающий нагрузку амортизатор 5, компенсирующее устройство 6 для компенсации изменяющихся усилий амортизатора 5 по несущему пути tw и натяжное устройство 7 для регулирования усилия V предварительного натяжения амортизатора 5. За счет выполнения постоянного держателя в виде постоянной подвески крепежная часть 2 расположена в положении монтажа вверху, а грузонесущая часть 3 проходит вниз. Все изображенные на чертежах векторы силы следует рассматривать как качественные и не имеющие точных значений.
Крепежная часть 2 содержит корпус 8 с плитообразными боковыми стенками 9, из которых передняя стенка на фиг.1, 2, 3 -5, 9 -11 и крышкообразные верхние левые боковые стенки на фиг.1, 2, 9, 10 отсутствуют. Обе большие боковые стенки, т.е. передняя стенка и задняя стенка 9, соединены с верхним присоединительным язычком 10, имеющим крепежное отверстие 11 для соединения и подвешивания к основанию (не показано). Корпус 8 охватывает сбоку вверх пружинную систему 4 и грузонесущую часть 3, причем последняя по несущему пути tw перемещается вниз из корпуса 8 через рамку 12 в направлении v перемещения в направлении нагрузочного усилия и обратно против направления v перемещения в направлении несущего усилия Т.
Согласно изобретению предусмотрено корректирующее устройство 13 для корректировки отклонений несущего усилия Т по несущему пути tw вследствие измененного усилия V натяжения. Как более подробно поясняется ниже, корректирующее устройство 13 выполняет одновременно функцию натяжения амортизатора 5. Корректирующее устройство 13 связано с частью натяжного устройства 7, чтобы одновременно за одну операцию и автоматически с изменением произведенной, например, на заводе предварительной установки усилия натяжения можно было посредством корректирующего устройства 13 произвести корректировку.
Амортизатор 5 включает в себя две расположенные в положении монтажа горизонтально выполненные в виде пружин сжатия пружины 14, которые силовой стороной опираются на корпус 8, а нагрузочной стороной в нагрузочной точке 15 - на компенсирующее устройство 6. Последнее содержит для каждой пружины 14 два кулачковых рычага 16, которые параллельно на расстоянии друг от друга и перпендикулярно несущему усилию Т расположены на корпусе 8 соосно и с возможностью свободного поворота на общем поворотном валике 17 вокруг оси s поворота. Ось s поворота перпендикулярна передней и задней боковым стенкам 9 корпуса 8. Надетые на поворотный валик 17 втулки 23 дистанцируют кулачковые рычаги 16 друг от друга и от боковых стенок 9.
На удалении от оси s поворота пружины 14 своими нагрузочными точками 15 воздействуют с образованием силового плеча К на соответствующие им кулачковые рычаги 16. Каждый из них снабжен кулачковой боковой поверхностью 18, имеющей специфический криволинейный контур для компенсации изменяющихся усилий пружин по несущему пути tw. Грузонесущая часть 3 содержит нагрузочные ролики 19, установленные с возможностью поворота вокруг общей оси d вращения перпендикулярно оси f пружин и перпендикулярно направлению t несущего усилия. Посредством нагрузочных роликов 19 грузонесущая часть 3 прилегает к кулачковым боковым поверхностям 18 с возможностью обката. В точках 24 обката нагрузочные ролики 19 прилегают к соответствующим им кулачковым боковым поверхностям 18, причем каждая точка 24 обката в каждой точке кулачковой боковой поверхности 18 дистанцирована от оси d вращения. За счет этого между точкой 24 обката и осью s поворота образуется нагрузочное плечо L, изменяющееся при обкате нагрузочного ролика 19 по кулачковой боковой поверхности 18. Это показано на фиг.9-11. В глаза бросается то, что кулачковые боковые поверхности 18, как показано на переднем кулачковом рычаге 16 на фиг.1, на всем своем нелинейном, криволинейном и постоянном протяжении одной составляющей направления всегда указывают в направлении t несущего усилия Т, чтобы создать его для груза в направлении t. Поскольку при эксплуатации несущее усилие Т должно находиться в равновесии с нагрузочным усилием Lk, грузонесущая часть 3 блокируется после заводской установки определенного натяжения амортизатора 5.
Соответствующие правым на чертеже пружинам 14 кулачковые рычаги 16 охватывают с боков два грузонесущих язычка 20, которые подвешены к оси d вращения и проходят параллельно вниз через рамку 12 для присоединения к дополнительному несущему элементу 21 с целью подвешивания груза (не показан). Соответствующие левым пружинам 14 кулачковые рычаги 16 расположены между дистанцированными грузонесущими язычками 20. Обе пружины 14 в показанном на фиг.1, 2, 3, 9-11 основном положении расположены на одной общей горизонтальной оси f. Таким образом, по отношению к плоскости зеркальной симметрии, перпендикулярной задней боковой стенке 9 корпуса 8 и перпендикулярной плоскости, проходящей в направлении несущего усилия параллельно осям пружин, держатель 1 имеет зеркально-симметричную характеристику усилий и в значительной степени зеркально-симметричное расположение конструктивных элементов.
Корректирующее устройство 13 расположено в корпусе 8. При этом частью корректирующего устройства 13 является направляющая 25 в виде продольного паза 26, который выполнен в каждом кулачковом рычаге 16. В пазу 26 по направляющему пути fw перемещается нагрузочная точка 15 пружины 14, причем направляющий путь fw ограничен тем, что нагрузочная точка 15 в направлении продольной оси 1 упирается концом в пазу 26. Обозначенный на чертеже направляющий путь fw относится к геометрической середине нагрузочной точки 15 по продольной оси 1 паза 26. Паз 26 своей продольной осью 1 расположен с наклоном к направлению t несущего усилия, а одной составляющей пути - в направлении оси f пружины. При этом расстояние между нагрузочной точкой 15 и осью s поворота образует силовое плечо К, которое можно изменять за счет перемещения нагрузочной точки 15 в направляющей 25 или в пазу 26 по направляющему пути fw. Как более подробно поясняется на фиг.3-5, корректировка устанавливающегося при изменении натяжения отклонения от желаемой постоянной характеристики несущего усилия Т по несущему пути tw происходит за счет изменения силового плеча К по длине и направлению относительно соответствующего ему кулачкового рычага. С помощью корректировки можно обнаружить, например, изменившиеся потери на трение подвижных частей и, в частности, скользящих по отношению друг к другу или обкатывающихся частей.
Для пояснения расположения нагрузочной точки 15 пружины 14 в пазу 26 на фиг.2 передний левый кулачковый рычаг 16 отсутствует и обозначен штрихпунктиром. С нагрузочной стороны каждая пружина 14 опирается на тарельчатую нагрузочную опору 27, которая, в свою очередь, опирается на поперечный палец 28. Он своими выполненными в виде направляющих концов 29 концами установлен в пазах 26 с возможностью перемещения. Каждый направляющий конец 29 с двух сторон с образованием заплечика 30 и двух параллельных направляющих боковых поверхностей 31 выполнен с лысками. За счет этого направляющий конец 29 направляющими боковыми поверхностями 31 прилегает к внутренним боковым поверхностям соответствующего ему паза 26 без проворачивания и с возможностью перемещения. Поскольку в этом месте усилия пружин передаются на компенсирующее устройство 6 или на соответствующие кулачковые рычаги 16, оба направляющих конца 29 поперечного пальца 28 образуют нагрузочную точку 15 соответствующей пружины 14.
В торцевой стороне направляющего конца 29 выполнена маркировка 32 в виде насечки V-образного сечения, которая проходит перпендикулярно направляющим боковым поверхностям 31 или перпендикулярно продольной оси 1 и указывает середину торцевой стороны относительно продольной оси 1 паза 26. Сбоку вдоль паза 26 расположена нагрузочная шкала 33 для указания направляющего пути fw направляющего конца 29 в пазу 26, причем шкала 33 указывает нагрузку в килоньютонах (кН) и в фунтах (lps) . Поперечный палец 28 удерживается в пазу 26 в определенном корректированном положении посредством удерживающего устройство 34, которое более подробно поясняется ниже с помощью фиг.7 и 8, и перемещается по направляющему пути fw.
С помощью фиг.3-5 более подробно поясняется принцип, лежащий в основе корректирующего устройства 13. Здесь правая пружина опущена. Кроме того, положение нагрузочной точки 15 левой пружины 14 остается неизменной в основном положении, чтобы пояснить изменение положения нагрузочной точки 15 опущенной правой пружины вследствие измененной предварительной установки натяжения. Однако на практике это вряд ли бы осуществлялось, поскольку всегда желательны симметричные соотношения сил и было бы установлено одинаковое натяжение обеих пружин. Положение самих кулачковых рычагов 16 остается на фиг.3-5 неизменным, так что расстояние между осью s поворота и точкой 24 обката и, тем самым, соответствующее нагрузочное плечо L остаются у всех кулачковых рычагов 16 одинаковыми и неизменными.
На фиг.3 обе нагрузочные точки 15 пружин 14 находятся в основном положении, тогда как правая нагрузочная точка 15 правой пружины 14 на фиг.4 смещена по направляющему пути fw вниз к одному концу паза 26, а на фиг. 5 - вверх к его другому концу. При смещении правой нагрузочной точки 15 вниз расстояние между нею и крепежной опорой 36, в которой со стороны закрепления установлена пружина (не показана), уменьшается и тем самым пружина соответственно сжимается, т.е. продолжает подвергаться напряжению. Одновременно силовое плечо К удлиняется, а его ориентация изменяется. Аналогичным образом при перемещении правой нагрузочной точки 15 вверх расстояние между нею и крепежной опорой 36 увеличивается и тем самым пружина соответственно ослабляется, а силовое плечо укорачивается с изменением своей ориентации. Таким образом, за счет перемещения нагрузочной точки 15 в пазу 26 регулируется натяжение (напряжение) пружины. Кроме того, в то же время с перемещением нагрузочной точки 15 вверх или вниз ось f пружины, которая в основном положении проходит приблизительно горизонтально, наклоняется соответственно вверх или вниз. Таким образом, при перемещении нагрузочной точки 15 вверх, что равнозначно ослаблению пружины, увеличивается отношение силовой составляющей в направлении t несущего усилия к силовой составляющей, перпендикулярной ему. Этим учитывается то обстоятельство, что менее натяженная пружина имеет меньшее усилие. Аналогичным образом при перемещении нагрузочной точки 15 вниз, что равнозначно дальнейшему натяжению пружины 14, уменьшается отношение силовой составляющей в направлении t несущего усилия к силовой составляющей, перпендикулярной ему. Этим учитывается то обстоятельство, что более натяженная пружина имеет большее усилие. Таким образом, в обоих случаях силовое плечо К изменяется по направлению и величине, тогда как нагрузочное плечо L остается неизменным до тех пор, пока грузонесущая часть остается без перемещения в положении на фиг.3-5. Тем самым, корректировка отклонений несущего усилия Т по несущему пути tw или поведения груза вследствие измененного усилия V натяжения происходит посредством корректировки силового плеча по его положению и направлению относительно кулачкового рычага 16.
В точке 24 обката качественно обозначены силовая составляющая Ts в направлении t несущего усилия и Тh в горизонтальном направлении. Кроме того, качественно обозначено усилие V натяжения, которое изменяется в соответствии с перемещением нагрузочной точки 15 в пазу 26. При этом силовая составляющая Ts изменяется пропорционально изменяющемуся усилию V натяжения, причем усилие V натяжения изменяется также в своем направлении вследствие перемещения пружины 14 из своего горизонтального основного положения. Из-за имеющейся симметрии усилий и использования четырех кулачковых рычагов 16 отдельная силовая составляющая Ts на нагрузочный ролик 19 составляет четверть всего несущего усилия Т, если не учитываются другие влияния, такие как изменившееся трение подвижных частей.
Решающим для степени изменения отношения силовой составляющей Тs в направлении t несущего усилия к силовой составляющей Тh, перпендикулярной ему, является, в том числе, наклон продольной оси 1 паза 26. Этот наклон обозначен на фиг.3 - 5 и 6, причем на фиг.6 для наглядности пружинная система 4 и нагрузочные ролики 19 изображены только на виде сбоку. Здесь наклон описан корректирующим углом µ, который образован силовым плечом К и продольной осью l паза 26. При используемых в этом примере геометрических размерах и при условии, что направляющая 25 должна быть линейной, оптимальный корректирующий угол µ оставляет около 30°. Другие геометрические размеры могут потребовать другого оптимального корректирующего угла.
Натяжное устройство 7 содержит далее регулировочное устройство 35 для предварительной установки усилия натяжения. Оно, в принципе, аналогично раскрытому в DE 102005045736 и PCT/DE 2006/001678 регулировочному устройству, однако благодаря корректирующему устройству 13 регулировочное устройство 35 выполнено менее затратно. Также здесь пружина 14 со стороны закрепления установлена в крепежной опоре 36, выполненной с возможностью перемещения в направлении оси f пружины и фиксации. Для этого выполненная в виде натяжной стенки 37 боковая стенка 9 корпуса 8, на которую пружина 14 опирается со стороны закрепления, установлена с возможностью перемещения в направлении оси f пружины и относительно передней и задней боковых стенок 9 и фиксации в определенном положении натяжения. Регулировочное устройство 35 содержит для каждой пружины 14 две поперечные подпорки 38 прямоугольного сечения, которые расположены перпендикулярно оси f пружины и закреплены торцевыми сторонами в передней и задней боковых стенках 9. От натяжной стенки 37 к поперечным подпоркам 38 ведут два расположенных по диагонали в ней натяжных винта 39, проходящих через сквозные отверстия 40 с внутренней резьбой, в которую ввинчены натяжные винты 39. При вращении натяжных винтов 39 натяжная стенка 37 смещается и натяжение пружин 14 изменяется. На натяжные винты 39 навинчена контргайка 41, которую для контрения в определенном положении натяжения затягивают к поперечным подпоркам 38. Установка натяжения посредством натяжной стенки 37 на всех фигурах остается одинаковой. В данном примере натяжение пружин 14 с помощью регулировочного устройства 35 производится на заводе или в мастерской, а затем в определенном натяжном устройстве фиксируется и, при необходимости, опломбировывается. При этом нагрузочная точка 15 находится в основном положении, в котором она удерживается посередине паза 26. В месте монтажа держателя 1 он с помощью корректирующего устройства 13 может быть согласован с фактической нагрузкой.
Удерживающее устройство 3 более подробно поясняется на фиг.7 и 8, на которых изображена пара параллельных кулачковых рычагов 16, поперечный палец 28, поворотный валик 17 вместе с втулками 23 и удерживающее устройство 34 в перспективном виде сверху и на виде снизу соответственно. При этом для наглядности правый на фиг.7 кулачковый рычаг 16 изображен лишь штрихпунктиром.
Для поддержания поперечного пальца 28 параллельно ему предусмотрена поперечная колодка 42 прямоугольного сечения. Поперечная колодка 42 расположена параллельно и дистанцировано от продольной оси 1 паза 26, а концами между кулачковыми рычагами 16 и соединена с ними посредством вставного соединения без проворачивания и оставаясь свободной, причем она концом проходит через кулачковый рычаг 16 и выступает за него не небольшую величину. Поперечный палец 28 имеет круглое сечение, до своих направляющих концов 29 с лысками. Направляющие концы 29 прилегают благодаря вставному соединению поперечного пальца 28 и поперечная колодка 42 с соответствующими кулачковыми рычагами 16 легко монтируется и демонтируется.
Поперечный палец 28 посредством установленного с возможностью вращения посередине в поперечной колодке 42 винта 43 соединен с ней и при вращении ходового винта 43 линейно перемещается в пазу 26. Для этого поперечный палец 28 имеет центральное первое сквозное отверстие 44 с резьбой (не показана), в которую ввинчен винт 43. При вращении ходового винта 43 установленный без проворачивания своими направляющими концами 29 в пазах 26 поперечный палец 28 может линейно перемещаться вдоль пазов 26. Поперечная колодка 42 имеет второе сквозное отверстие 45, в котором с возможностью проворачивания установлен ходовой винт 43.
Посредством законтренной и прилегающей сбоку к поперечной колодке 42 гайки 46 ходовой винт 43 и тем самым поперечный палец 28 с нагрузочным концом пружины 14 опираются на поперечную колодку 42 и тем самым на кулачковые рычаги 16.
Как видно, например, на фиг.1, 7, 8 поперечная колодка 42 расположена под поперечным пальцем 28. Винт 43 проходит регулировочным концом 47 через поперечную колодку 42, причем регулировочный конец 47 снабжен на торцевой стороне головкой 48, легко доступной снизу. Таким образом, изменение натяжения амортизатора 4 посредством вращения головки 48 или винта 43 может осуществляться, в частности, тогда, когда корпуса не имеет дна, как это принято и предусмотрено в данном примере.
Для своей надежной установки с возможностью перемещения направляющий конец 29 проходит через паз 26 и выступает за боковую стенку 9, в которой выполнен паз 26, на небольшую величину.
Из частичного разреза поворотного валика 17 на фиг.8 хорошо видно, что на него надеты втулки 23, которые упираются торцевыми сторонами в кулачковые рычаги 16 для их дистанцирования друг от друга и от корпуса 8. Ось d вращения выполнена в виде оси 49, на которой сообща расположены все четыре нагрузочных ролика 19, дистанцированных, в свою очередь, друг от друга и от стенок 9 корпуса 8 за счет втулок 23 и подвешенных несущих язычков 20. Кроме того, оба конца оси 49 расположены в вертикальных направляющих прорезях 22 передней и задней боковых стенок 9 корпуса 8, причем на фиг.12 направляющая прорезь 22 изображена также в передней боковой стенке 9 корпуса 8.
На фиг.9-11 в трех положениях показано перемещение грузонесущей части 3 по несущему пути tw. На фиг.9 грузонесущая часть 3 изображена в верхнем положении перемещения, в котором она максимально втянута в корпус 8. На фиг.10 грузонесущая часть 3 изображена в среднем положении перемещения, а на фиг.11 - в нижнем положении перемещения, в котором она максимально вытянута из корпуса 8.
За счет сочленения кулачковых рычагов 16 с корпусом 8 пружины 14 слегка поворачиваются. Геометрия держателя 1 установлена при этом так, что пружины 14 в среднем положении перемещения расположены приблизительно перпендикулярно направлению v перемещения. Кроме того, установленное с помощью корректирующего устройства 13 усилие V натяжения остается постоянным.
Посредством кулачковых рычагов 16 в каждом положении перемещения грузонесущей части 3 по несущему пути tw на нагрузочные ролики 19 действует несущее усилие Т с вертикальной здесь составляющей Ts в направлении t несущего усилия и горизонтальной здесь составляющей Th в направлении оси f пружины и перпендикулярно составляющей Ts, причем благодаря симметричной конструкции или симметричному расположению пружин 14 горизонтальные силовые составляющие Тs взаимно уничтожаются и вместе с расположенным на несущем элементе 21 грузонесущей части 3 грузом (не показан) обеспечивают соединение отдельных частей держателя 1. Кулачковые боковые поверхности 13 профилированы так, что силовая составляющая Ts возрастает от нижнего положения перемещения к верхнему непрерывно и нелинейно в расчетной степени так, что изменяющиеся усилия пружин 14 при их сжатии и растяжении и измененное за счет описанного выше поворота пружин 14 с поворотом кулачковых рычагов 16 направление оси f полностью компенсируются и на груз действует постоянное по несущему пути tw несущее усилие Т. Последнее является приблизительно суммой всех вертикальных силовых составляющих Ts на нагрузочных роликах 19. Поскольку здесь предусмотрены четыре кулачковых рычага 16, воздействующих на соответствующие нагрузочные ролики 19, несущее усилие Т составляет четырехкратное значение силовых составляющих Ts. На фиг.7а-с для дальнейшего пояснения изменения соотношений усилий показаны силовое плечо К и нагрузочное плечо L. При этом силовое плечо К и усилие V натяжения остаются постоянными, поскольку с помощью корректирующего устройства 13 никакие изменения не производились. Нагрузочное плечо L увеличивается с перемещением грузонесущей части 3 вниз. В этом отношении следует сослаться на PCT/DE 2006/001678.
На фиг.8 держатель 1, как и на фиг.1, изображен в перспективном виде сбоку, причем здесь показаны отсутствующие на фиг.1 боковые стенки 9 корпуса 8. В передней боковой стенке 9 выполнено два окошка 50 для рассмотрения паза 26 и шкалы 33 нагрузки.
Как уже сказано, с настройкой амортизатора 5 в рабочее положение держателя 1 на груз действует усилие пружинной системы 4. В случае отсутствия груза, например при транспортировке или установке держателя 1, предназначенное для поддержания трубопровода несущее усилие Т ускорило бы в направлении t грузонесущую часть 3 к корпусу 8. Для блокировки грузонесущей части 3 в случае ненагруженного держателя 1 предусмотрен изображенный на фиг.8 транспортный предохранитель 51. Он содержит зубчатую шайбу 52, которая надевается на проходящую через направляющую прорезь 22 ось d вращения или грузонесущую ось 49 и которая, будучи установлена между двумя зубчатыми рейками 53, расположенными на корпусе 8 и выполненными в виде блокировочных реек, входит в эти рейки, блокируя тем самым движение грузонесущей части 3 по несущему пути tw. После подвешивания груза к несущему элементу 21 зубчатая шайба 52 может быть снята.
Параллельно направляющей прорези 22 и сбоку от нее предусмотрена шкала 54 для указания несущего пути tw, которая имеет разметку в единицах пути (сантиметры, миллиметры и дюймы).
Грузонесущая ось 49 и поворотные валики 17 проходят своими концами через переднюю и заднюю боковые стенки 9 и посредством стопорных колец 55 защищены от осевого смещения или выпадения. Боковые стенки 9 корпуса 8, присоединительный язычок 10 и рамка 12 свинчены между собой (не показано), тогда как конструктивные элементы расположены в корпусе 8 свободно по отношению к компенсирующему устройству 6, корректирующему устройству 13, нагрузочным роликам 19 и грузонесушим язычкам 20, так что держатель 1 может быть легко монтирован и демонтирован.
Перечень ссылочных позиций
1 - постоянный держатель
2 - крепежная часть
3 - грузонесущая часть
4 - пружинная система
5 - амортизатор
6 - компенсирующее устройство
7 - натяжное устройство
8 - корпус
9 - боковая стенка
10 - присоединительный язычок
11 - крепежное отверстие
12 - рамка
13 - корректирующее устройство
14 - пружина
15 - нагрузочная точка
16 - кулачковый рычаг
17 - поворотный валик
18 - кулачковая боковая поверхность
19 - нагрузочные ролики
20 - грузонесущий язычок
21 - несущий элемент
22 - направляющая прорезь
23 - втулка
24 - точка обката
25 - направляющая
26 - паз
27 - нагрузочная опора
28 - поперечный палец
29 - направляющий конец
30 - заплечик
31 - направляющая боковая поверхность
32 - маркировка
33 - шкала нагрузки
34 - удерживающее устройство
35 - регулировочное устройство
36 - крепежная опора
37 - натяжная стенка
38 - поперечная подпорка
39 - натяжной винт
40 - сквозное отверстие
41 - контргайка
42 - поперечная колодка
43 - ходовой винт
44 - первое сквозное отверстие
45 - второе сквозное отверстие
46 - гайка
47 - регулировочный конец
48 - головка винта
49 - ось погрузочных роликов
50 - окошко в корпусе
51 - транспортный предохранитель
52 - зубчатая шайба
53 - зубчатая рейка
54 - шкала пути
55 - стопорные кольца
d - ось вращения
f - ось пружины
fw - направляющий путь
К - силовое плечо
1 - продольная ось
Lk - нагрузочное усилие
L - нагрузочное плечо
s - ось поворота
t - направление несущего усилия
Т - несущее усилие
Тs - вертикальная составляющая несущего усилия
Th - горизонтальная составляющая несущего усилия
tw - несущий путь
v - направление перемещения
V - усилие натяжения
µ - корректирующий угол
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОРИЗОНТАЛЬНЫЙ СТЕНД ДЛЯ ИСПЫТАНИЯ ИЗДЕЛИЙ НА МНОГОКРАТНЫЕ УДАРЫ | 1994 |
|
RU2086944C1 |
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2010 |
|
RU2479254C2 |
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ | 2013 |
|
RU2527626C1 |
| УСТРОЙСТВО ДЛЯ НАТЯЖКИ ПЕРЕДКА БОТИНКА НА КОЛОДКУ | 1971 |
|
SU322872A1 |
| ШЛИФОВАЛЬНЫЙ СТАНОК С МНОЖЕСТВОМ ПАРАЛЛЕЛЬНЫХ АБРАЗИВНЫХ ЛЕНТ ДЛЯ ОДНОВРЕМЕННОГО ШЛИФОВАНИЯ ПОВЕРХНОСТЕЙ ОБРАБАТЫВАЕМЫХ ДЕТАЛЕЙ | 1993 |
|
RU2116880C1 |
| СТОПОРНЫЙ МЕХАНИЗМ ДЛЯ МНОГОЛЕНТОЧНОГО ШЛИФОВАЛЬНОГО СТАНКА | 1993 |
|
RU2118586C1 |
| ТОРМОЗНОЕ УСТРОЙСТВО | 1999 |
|
RU2250852C9 |
| МЕХАНИЗМ ПРОТЯЖКИ ПЛЕНКИ ДЛЯ КИНОАППАРАТА | 1972 |
|
SU352482A1 |
| ПОСТОЯННАЯ ОПОРА | 2006 |
|
RU2427751C2 |
Изобретение относится к постоянному держателю (1) для перемещающихся грузов, в частности трубопроводов и т.п., содержащему крепежную часть (2), грузонесущую часть (3) и расположенную между крепежной и грузонесущей частями (2, 3) пружинную систему (4) для создания несущего усилия (Т), остающегося постоянным по несущему пути грузонесущей части относительно крепежной части, причем пружинная система (4) содержит воспринимающий груз амортизатор (5), компенсирующее устройство (6) для компенсации изменяющихся усилий амортизатора (5) по несущему пути (tw) и натяжное устройство (7) для регулирования усилия (V) натяжения амортизатора (5). Чтобы обеспечить простое согласование амортизатора (5) с изменением усилия (V) его натяжения предложено корректирующее устройство (13) для корректировки отклонений несущего усилия (Т) по несущему пути (tw) вследствие измененного усилия (V) натяжения. Технический результат: упрощение корректировки отклонений характеристики «усилие пружины - ход пружины» от теоретической характеристики без замены конструктивных элементов. 24 з.п. ф-лы, 12 ил.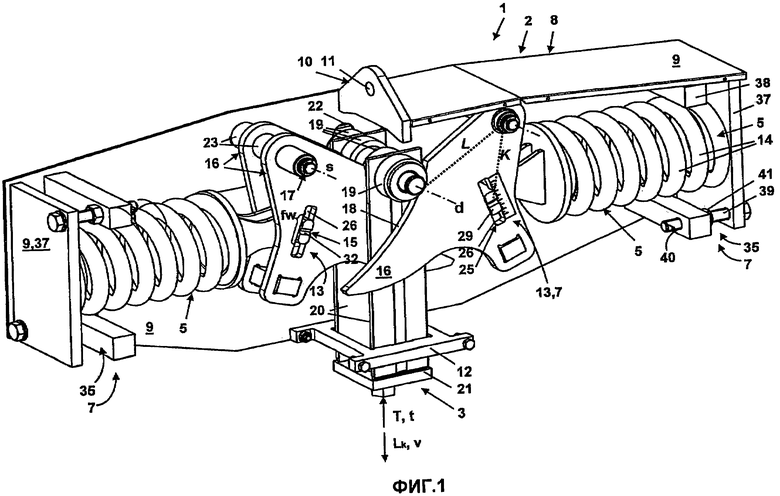
1. Постоянный держатель для перемещающихся грузов, в частности трубопроводов и т.п., содержащий крепежную часть (2), грузонесущую часть (3) и расположенную между крепежной и грузонесущей частями (2, 3) пружинную систему (4) для создания несущего усилия (Т), остающегося постоянным по несущему пути грузонесущей части относительно крепежной части, причем пружинная система содержит воспринимающий груз амортизатор, компенсирующее устройство для компенсации изменяющихся усилий амортизатора по несущему пути и натяжное устройство для регулирования усилия натяжения амортизатора, отличающийся тем, что предусмотрено корректирующее устройство (13) для корректировки отклонений несущего усилия (Т) по несущему пути (tw) вследствие измененного усилия (V) натяжения, причем корректирующее устройство связано с натяжным устройством так, что корректировка осуществляется автоматически с изменением усилия натяжения.
2. Держатель по п.1, отличающийся тем, что компенсирующее устройство (6) содержит связанный с грузонесущей частью (3) кулачок, амортизатор (5) содержит, по меньшей мере, одну пружину (14), в частности пружину сжатия, которая силовой стороной опирается в силовой точке на крепежную часть (2), а для передачи усилия с амортизатора (5) на грузонесущую часть (3) воздействует нагрузочной стороной в нагрузочной точке (15) на кулачок, при этом нагрузочная точка (15) и/или силовая точка для корректировки отклонений несущего усилия (Т) по несущему пути (tw) вследствие измененного усилия (V) натяжения расположена с возможностью изменения положения относительно кулачка и по пути регулирования с составляющей пути, перпендикулярной оси (f) соответствующей пружины (14), и в одной плоскости с несущим усилием (Т) или параллельно ему, а также с возможностью фиксации в определенном корректированном положении.
3. Держатель по п.2, отличающийся тем, что корректирующее устройство (13) содержит направляющую (25) для нагрузочной точки (15) и/или силовой точки одной или нескольких пружин (14).
4. Держатель по п.3, отличающийся тем, что нагрузочная точка (15) для своего регулирования расположена с возможностью перемещения в направляющей (25) по направляющему пути (fw) с одной составляющей пути по продольной оси (1) пружины (14) и с одной составляющей пути, перпендикулярной продольной оси (1) пружины (14), и в одной плоскости с несущим усилием (Т) и с возможностью фиксации в нужном положении регулирования в направляющей (25) относительно кулачка с силовым и/или с геометрическим замыканием.
5. Держатель по одному из пп.2-4, отличающийся тем, что амортизатор (5) содержит две пружины (14), выполненные в виде пружин сжатия, причем пружины сжатия расположены симметрично несущему усилию (Т) напротив друг друга, при этом каждая пружина сжатия своей нагрузочной стороной воздействует в нагрузочной точке (15) на кулачок или на соответствующий ей кулачок.
6. Держатель по п.5, отличающийся тем, что пружины (14) в основном положении расположены на одной общей оси (f) или под наклоном друг к другу.
7. Держатель по п.6, отличающийся тем, что пружины в основном положении расположены с одной составляющей пути против несущего усилия (Т) навстречу друг другу.
8. Держатель по п.2 или 3, отличающийся тем, что кулачок содержит, по меньшей мере, один выполненный в виде кулачкового рычага (16) и установленный на крепежной части (2) в поворотном шарнире рычаг с двумя противоположными друг другу боковыми поверхностями в его продольной протяженности, пружина (14) своей нагрузочной стороной установлена с возможностью поворота на одном участке обращенной к ней первой боковой поверхности или на обращенной к ней первой боковой поверхности или опирается на нее, при этом вторая боковая поверхность выполнена в виде кулачковой боковой поверхности (18), к которой с возможностью перемещения или обката прилегает грузонесущая часть (3).
9. Держатель по п.8, отличающийся тем, что грузонесущая часть (3) содержит нагрузочный ролик (19) с осью (d) вращения, перпендикулярной оси (f) пружины и перпендикулярной направлению (t) несущего усилия, при этом кулачковая боковая поверхность (18) прилегает к нагрузочному ролику с возможностью обката в плоскости, перпендикулярной оси (d) вращения.
10. Держатель по п.8, отличающийся тем, что кулачковая боковая поверхность (18) прилегает к грузонесущей части (3) перемещающейся с перемещением грузонесущей части (3) по несущему пути (tw) точкой или участком, которая/который с изменяющимся по несущему пути (tw) значением указывает в направлении несущего усилия (Т).
11. Держатель по п.2, отличающийся тем, что кулачок выполнен плоским с одной большей боковой поверхностью, кулачок установлен на крепежной части (2) держателя (1) в поворотной опоре вокруг оси (s) поворота, перпендикулярной своей большей боковой поверхности и перпендикулярной продольной оси (1) пружины (14) и несущему пути (tw), при этом направляющая (25) встроена в кулачок на расстоянии от поворотной опоры.
12. Держатель по п.10, отличающийся тем, что направляющая (25) имеет паз (26) или прорезь для размещения и направления нагрузочной точки (15).
13. Держатель по п.12, отличающийся тем, что паз (26) выполнен в своей продольной протяженности линейным.
14. Держатель по п.13, отличающийся тем, что расстояние между осью поворота кулачкового рычага (16) на крепежной части (2) и местом поворотной установки пружины на первой боковой поверхности кулачкового рычага (16) образовано в виде силового плеча, причем паз (26) и силовое плечо заключают между собой корректирующий угол (µ) больше 0°.
15. Держатель по п.3, отличающийся тем, что пружина (14) своей силовой стороной расположена на крепежной части (2) с возможностью поворота.
16. Держатель по п.12, отличающийся тем, что нагрузочная точка (15) пружины (14) в основном положении расположена в пазу (26) посередине относительно его продольной протяженности.
17. Держатель по п.3, отличающийся тем, что нагрузочная точка (15) в направляющей (25) посредством удерживающего устройства (34) опирается на кулачок.
18. Держатель по п.12, отличающийся тем, что для каждой пружины (14) предусмотрены два кулачковых рычага (16) с пазом (26) каждый для направления нагрузочной точки (15) соответствующей пружины (14), причем кулачковые рычаги расположены на крепежной части (2) параллельно на расстоянии друг от друга и по одной прямой с несущим усилием (Т), а также приблизительно перпендикулярно оси (f) пружины и на общем поворотном валике (17) с возможностью поворота.
19. Держатель по п.18, отличающийся тем, что пружина (14) опирается посередине на первый поперечный элемент в виде поперечного пальца (28), который одним направляющим концом (29) установлен с возможностью перемещения в одной из направляющих (25) в кулачковых рычагах (16).
20. Держатель по п.19, отличающийся тем, что направляющий конец (29) выполнен с двух сторон с лысками и с образованием заплечика (30) и двух параллельных направляющих боковых поверхностей (31), при этом направляющий конец (29) прилегает к внутренним боковым поверхностям соответствующей направляющей (25) без проворачивания и с возможностью перемещения.
21. Держатель по п.19 или 20, отличающийся тем, что для поддержания поперечного пальца (28) предусмотрен второй поперечный элемент в виде поперечной колодки (42), которая расположена параллельно и дистанцирована от продольной оси (1) паза (26) и соединена концами с кулачковыми рычагами (16), при этом поперечный палец (28) соединен с поперечной колодкой (42) посредством установленного в ней посередине с возможностью вращения ходового винта (43) и выполнен с возможностью перемещения в пазу (26) с вращением ходового винта (43).
22. Держатель по п.21, отличающийся тем, что поперечная колодка (42) в положении монтажа расположена с нижней стороны поперечного пальца (28), ходовой винт (43) проходит регулировочным концом (47) через поперечную колодку (42), при этом на регулировочном конце (47) расположена головка винта для вращения ходового винта (43).
23. Держатель по п.1, отличающийся тем, что натяжное устройство (7) содержит регулировочное устройство (35) для предварительной установки усилия (V) натяжения.
24. Держатель по п.23, отличающийся тем, что пружина (14) опирается на одной стороне, которая является крепежной стороной, и на другой стороне, которая является нагрузочной стороной, причем пружина (14) расположена с крепежной стороны в крепежной опоре (36) и/или с нагрузочной стороны - в нагрузочной опоре (27), причем крепежная опора (36) и/или нагрузочная опора (27) установлены с возможностью перемещения в направлении оси (f) пружины и фиксации.
25. Держатель по п.24, отличающийся тем, что крепежная опора (36) содержит выполненную в виде натяжной стенки (37) боковую стенку (9), на которую пружина (14) опирается крепежной стороной и которая посредством резьбового устройства выполнена с возможностью перемещения в направлении оси (f) пружины и фиксации.
| US 2924411 A, 09.02.1960 | |||
| DE 10104661 A1, 08.08.2002 | |||
| FR 2000305 A1, 05.09.1969 | |||
| ОДНОСТАДИЙНЫЙ СПОСОБ ПОЛУЧЕНИЯ 1,3-ПРОПАНДИОЛА ПУТЕМ ГИДРОФОРМИЛИРОВАНИЯ И ГИДРИРОВАНИЯ | 2002 |
|
RU2286330C2 |
| DE 8806433 U1, 14.09.1989 | |||
| Опора трубопровода | 1979 |
|
SU850965A1 |

