Предлагаемое устройство относится к области приборостроения и может быть использовано для оперативных регистрации и контроля технического состояния и функционирования автомобилей, а также психофизиологического состояния водителя при расследовании дорожно-транспортных происшествий в качестве «черного ящика».
Известны устройства контроля параметров движения транспортного средства (авт. свид. СССР №№457.054, 794.575, 915.035, 926.611, 1.327.713, 1.693.622; патенты РФ №№2.003.109, 2.021.927, 2.014.569, 2.169.929, 2.184.992, 2.190.238, 2.221.584, 2.222.830, 2.308.766; патенты США №№3.841.427, 3.898.652 и другие).
Из известных устройств наиболее близким к предлагаемому является «Устройство контроля параметров движения транспортного средства» (патент РФ №2.308.766, G07C 5/08, 2004), которое и выбрано в качестве прототипа.
Известное устройство обеспечивает регистрацию и контроль технического состояния и функционирования транспортного средства, а также психофизиологического состояния водителя до и в момент совершения дорожно-транспортного происшествия и передачи этих данных по радиоканалу на пункт приема и контроля. В состав устройства входит аппаратура, расположенная на транспортном средстве и предназначенная для магнитной записи, воспроизведения и передачи по радиоканалу информации как о состоянии транспортного средства, так и о состоянии водителя, а также аппаратура, расположенная на пункте приема и контроля.
Известное устройство обеспечивает передачу по радиоканалу на пункт приема и контроля только информации о дорожно-транспортном происшествии (ДТП), но не позволяет на пункте приема и контроля определить географические координаты ДТП, что особенно важно, если водитель и пассажиры в результате ДТП не имеют физической возможности сообщить об этом и нуждаются в скорой медицинской помощи.
Технической задачей изобретения является расширение функциональных возможностей устройства путем определения на пункте приема и контроля географических координат дорожно-транспортного происшествия и расстояния до него.
Поставленная задача решается тем, что устройство контроля параметров движения транспортного средства, содержащее в соответствии с ближайшим аналогом на транспортном средстве аппарат магнитной записи, первый привод механизма транспортирования носителя магнитной записи, который кинематически связан с колесом транспортного средства, второй и третий приводы механизма транспортирования носителя магнитной записи, генератор стирания, подключенный к магнитной стирающей головке, универсальную магнитную головку, блок управления, блок воспроизведения, подключенный к выходу первого переключателя, а входом управления - к выходу датчика меток носителя, выполненного в виде фотоэлектрического датчика и подключенного входом к выходу блока управления, реле времени, второй переключатель, первый и второй распределительные блоки, датчик состояния тормозной системы, датчик состояния приборов сигнализации, датчик состояния фар, датчик усилия сжатия водителем рулевого колеса, последовательно включенные задающий генератор, первый фазовый манипулятор, второй вход которого через второй распределительный блок соединен с выходом блока воспроизведения, частотный манипулятор, второй вход которого соединен со вторым выходом второго распределительного блока, и амплитудный модулятор, второй вход которого соединен с третьим выходом второго распределительного блока, и последовательно включенные усилитель мощности и передающую антенну, при этом входы управления первого, второго и, через реле времени, третьего приводов механизма транспортирования носителя магнитной записи, а также входы управления обоих переключателей связаны с соответствующими выходами блока управления, источник сигналов записи выполнен в виде переключаемого генератора импульсов, входом управления соединенного со входом управления второго переключателя, механизм транспортирования носителя магнитной записи выполнен по кинематической схеме кольцевого накопителя типа «роликовый лабиринт», носитель магнитной записи представляет собой кольцо магнитной ленты с равномерными по длине метками в виде перфораций, универсальная магнитная головка связана через последовательно соединенные первый распределительный блок, к которому подключены датчики состояния тормозной системы, приводов сигнализации, фар и усилия сжатия водителем рулевого колеса, и первый переключатель с источником сигналов записи либо с выходной шиной блока воспроизведения, на пункте приема и контроля последовательно включенные приемную антенну, первый усилитель высокой частоты, амплитудный ограничитель, синхронный детектор, второй вход которого соединен с выходом первого усилителя высокой частоты, и первый блок регистрации, последовательно подключенные к выходу амплитудного ограничителя первый удвоитель фазы, первый блок фазовой автоподстройки частоты, первый делитель фазы на два, частотный демодулятор, второй вход которого соединен с выходом амплитудного ограничителя, а третий вход через последовательно включенные второй блок фазовой автоподстройки частоты и второй делитель фазы на два соединен с выходом первого удвоителя фазы, и второй блок регистрации, последовательно подключенные к выходу амплитудного ограничителя первый фазовый детектор, второй вход которого соединен с выходом второго делителя фазы, сумматор, второй вход которого через второй фазовый детектор соединен с выходами амплитудного ограничителя и третьего делителя фазы на два, третий фазовый детектор, второй вход которого через последовательно включенные третий блок фазовой автоподстройки частоты и третий делитель фазы на два соединен с выходом первого удвоителя фазы, и третий блок регистрации, отличается от ближайшего аналога тем, что оно снабжено на транспортном средстве перемножителем, узкополосным фильтром, приемной антенной, приемником GPS-сигналов, компьютером, вторым фазовым манипулятором и сумматором, причем к выходу задающего генератора последовательно подключены перемножитель, второй вход которого соединен с выходом задающего генератора, узкополосный фильтр, второй фазовый манипулятор и сумматор, второй вход которого соединен с выходом амплитудного модулятора, а выход подключен ко входу усилителя мощности, к выходу приемной антенны последовательно подключены приемник GPS-сигналов и компьютер, выход которого соединен со вторым входом второго фазового манипулятора, на пункте приема и контроля вторым усилителем высокой частоты, вторым удвоителем фазы, тремя узкополосными фильтрами, четвертым и пятым делителями фазы на два, четвертым фазовым детектором, четвертым и пятым блоками регистрации, фазометром и арифметическим блоком, причем к выходу приемной антенны последовательно подключены второй усилитель высокой частоты, второй удвоитель фазы, первый узкополосный фильтр, четвертый делитель фазы на два, второй узкополосный фильтр, четвертый фазовый детектор, второй вход которого соединен с выходом второго усилителя высокой частоты, и четвертый блок регистрации, к выходу второго узкополосного фильтра последовательно подключены пятый делитель фазы на два, третий узкополосный фильтр, фазометр, второй вход которого соединен с выходом третьего делителя фазы на два, арифметический блок и пятый блок регистрации.
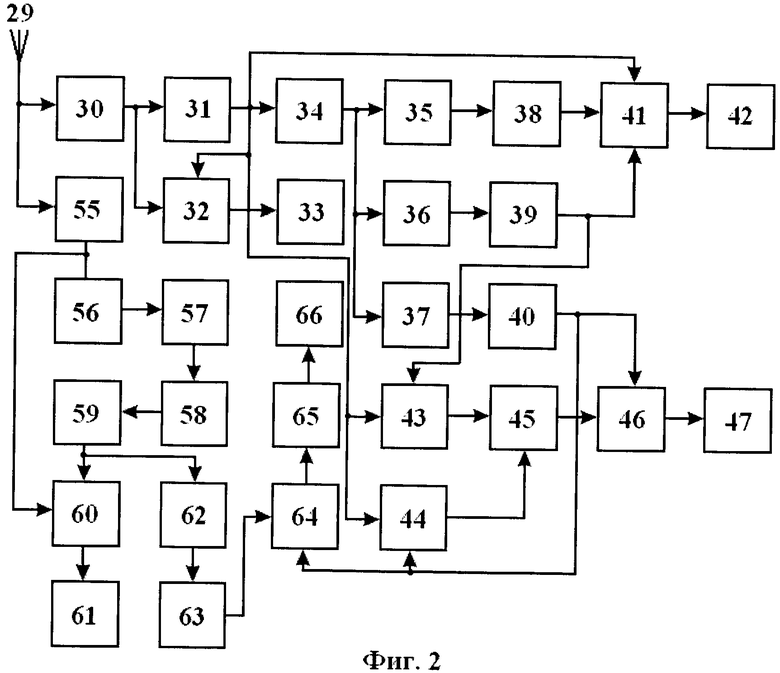
Структурная схема аппаратуры устройства, расположенной на транспортном средстве, представлена на фиг.1. Структурная схема аппаратуры устройства, расположенной на пункте приема и контроля, представлена на фиг.2. Временная диаграмма, поясняющая принцип работы устройства, изображена на фиг.3. Взаимное расположение частот изображено на фиг.4.
Аппаратура устройства, расположенная на транспортном средстве, содержит аппарат 1 магнитной записи, включающий в себя первый 2, второй 3 и третий 4 приводы механизма транспортирования носителя 5 магнитной записи; сопряженные с носителем 5 универсальную магнитную головку 6 и стирающую магнитную головку 7, подключенную к выходу генератора 8 стирания. Устройство содержит также блок 9 управления, соответствующие выходы которого связаны со входами управления первого 2, второго 3 и, через реле 10 времени, третьего 4 приводов механизма транспортирования, причем первый привод 2 имеет кинематическую связь с колесом транспортного средства; первый 12 и второй 13 переключатели; блок 14 воспроизведения, вход управления которого соединен с выходом датчика 16 меток носителя, вход которого соединен с выходом блока 9 управления, источник 17 сигналов записи, выполненный в виде переключаемого генератора импульсов, входом управления и выходами связанный соответственно со входом управления второго переключателя 13 и с его информационными входами, первый распределительный блок 15, к которому подключены датчики состояния тормозной системы 18, приборов сигнализации 19, фар 20, датчик усилия сжатия водителем рулевого колеса 21 и который связан с универсальной сигнальной головкой 6 и через первый переключатель 12 с источником 17 сигналов записи либо с блоком 14 воспроизведения. Вход управления первого переключателя 12 соединен с соответствующим выходом блока 9 управления. К выходу задающего генератора 23 последовательно подключены первый фазовый манипулятор 24, второй вход которого через второй распределительный блок 22 соединен с выходом блока 14 воспроизведения, частотный манипулятор 25, второй вход которого соединен со вторым выходом второго распределительного блока 22, амплитудный модулятор 26, второй вход которого соединен с третьим выходом распределительного блока 22, сумматор 54, усилитель 27 мощности и передающая антенна 28. К выходу задающего генератора последовательно подключены перемножитель 48, второй вход которого соединен с выходом задающего генератора 23, узкополосный фильтр 49 и второй фазовый манипулятор 50, выход которого соединен со вторым входом сумматора 54. К выходу приемной антенны 51 последовательно подключены приемник 52 GPS-сигналов и компьютер 53, выход которого соединен со вторым входом второго фазового манипулятора 50.
Носитель 5 магнитной записи представляет собой кольцо магнитной ленты с равномерными по длине метками в виде перфораций (не показаны). Механизм транспортирования (элементы внутренней структуры которого редукторы, муфты, электродвигатели и т.д. приводов 2-4 - не показаны) выполнен по кинематической схеме кольцевого накопителя типа «роликовый лабиринт», по которому перемещается «бесконечная» магнитная лента, а датчик 16 меток носителя выполнен в виде фотоэлектрического датчика.
Аппаратура устройства, расположенная на пункте приема и контроля, содержит последовательно включенные приемную антенну 29, первый усилитель 30 высокой частоты, амплитудный ограничитель 31, синхронный детектор 32, второй вход которого соединен с выходом первого усилителя 30 высокой частоты, и первый блок 32 регистрации. К выходу амплитудного ограничителя 31 последовательно подключены первый удвоитель 34 фазы, первый блок 35 фазовой автоподстройки частоты, первый делитель 38 фазы на два, частотный демодулятор 41, второй вход которого соединен с выходом амплитудного ограничителя 31, а третий вход через последовательно включенные второй блок 36 фазовой автоподстройки частоты и второй делитель 39 фазы на два соединен с выходом первого удвоителя 34 фазы, и второй блок 42 регистрации. К выходу амплитудного ограничителя 31 последовательно подключены первый фазовый детектор 43, второй вход которого соединен с выходом второго делителя 39 фазы на два, сумматор 45, второй вход которого через фазовый детектор 44 соединен с выходами амплитудного ограничителя 31 и третьего делителя 40 фазы на два, третий фазовый детектор 46, второй вход которого через последовательно включенные третий блок 37 фазовой автоподстройки частоты и третий делитель 40 фазы на два соединен с выходом удвоителя 34 фазы, и третий блок 47 регистрации. К выходу приемной антенны 29 последовательно подключены второй усилитель 55 высокой частоты, второй удвоитель 56 фазы, первый узкополосный фильтр 57, четвертый делитель 58 фазы на два, второй узкополосный фильтр 59, четвертый фазовый детектор 60, второй вход которого соединен с выходом второго усилителя 55 высокой частоты, и четвертый блок 61 регистрации. К выходу узкополосного фильтра 59 последовательно подключены пятый делитель 62 фазы на два, третий узкополосный фильтр 63, фазометр 64, второй вход которого соединен с выходом делителя 40 фазы на два, арифметический блок 63 и пятый блок 64 регистрации.
Устройство работает в двух режимах: в режиме записи и в режиме воспроизведения.
В режиме записи устройство работает следующим образом.
Принцип регистрации и контроля технического состоянии и функционирования транспортного средства, а также психофизиологического состояния водителя основан на использовании «бесконечной» магнитной ленты, запись на которой хранится в течение интервала времени, определяемого скоростью движения и длиной магнитной ленты. При этом непрерывность записи контролируемых параметров на ленту ограниченной длины обеспечивается созданием эффекта «бесконечности» путем склеивания ленты в кольцо и размещения ее в кассете на роликах в натянутом состоянии с возможностью движения мимо универсальной и стирающей магнитных головок.
При движении транспортного средства от его колеса 11, кинематически связанного с первым приводом 2 механизма транспортирования, начинается движение носителя 5 магнитной записи (в направлении, указанном на фиг.1 стрелкой). Блок 9 управления через переключатели 12 и 13 подключает к универсальной магнитной головке 6 один из выходов генератора 17 (источника сигналов записи), вырабатывающего по этому выходу импульсы постоянной частоты и амплитуды U1, которые записываются на носитель 5 и фиксируются на нем в виде магнитных отпечатков. Расстояния между отпечатками вдоль носителя прямо пропорциональны скорости транспортного средства. В результате формируются участки сигналограммы, содержащие информацию о скорости транспортного средства.
На магнитной ленте 5 записывается величина давления в тормозной системе, контролируемая датчиком 18, состояние приборов сигнализации, контролируемое датчиком 19, состояние фар (ближний или дальний свет), контролируемое датчиком 20, состояние и реакция водителя, контролируемые датчиком 21, как величина давления рук водителя на рулевое колесо, а также временные метки, контролируемые датчиком 16 меток носителя. В качестве датчика 18 давления в тормозной системе могут быть использованы манометры с индуктивным, емкостным или потенциометрическим преобразователем. В качестве датчика 19 состояния приборов сигнализации могут быть использованы герконы, диоды, фоторегистры и световоды. В качестве датчика 20 состояния фар (ближний или дальний свет) могут быть использованы герконы, диоды и световоды.
Таким образом, в режиме записи осуществляется постоянная запись на магнитную ленту 5 контролируемых параметров с привязкой их величин к бортовому времени, отсчет которого ведет датчик 16 меток. Запись хранится в течение интервала времени, определяемого скоростью движения и длиной магнитной ленты. При этом непрерывность записи контролируемых параметров на ленту ограниченной длины обеспечивается созданием эффекта «бесконечности» путем склеивания ленты в кольцо и размещения ее в кассете на роликах в натянутом состоянии с возможностью движения мимо универсальной 6 и стирающей 7 магнитных головок.
Запись производится с непрерывным стиранием зарегистрированных параметров так, что на ленте всегда остается информация последних нескольких минут движения транспортного средства. Каждый контролируемый параметр записывается на отдельную дорожку. При этом чем больше параметров регистрируется, тем больше записывается информации. Однако и при ограниченном числе записываемых параметров имеется возможность воссоздать функциональную картину движения транспортного средства в последние несколько минут до ДТП.
При остановке (или длительной стоянке) в пути первый привод 2 отключается и блок 9 управления включает третий привод 4, приводимый в движение электродвигателем (не показан) с постоянной скоростью; носитель продолжает движение в том же направлении, но уже с малой постоянной скоростью перемещения. Кроме того, в этом режиме с помощью переключателя 13 к магнитной головке 6 подключается другой выход генератора 17, на котором амплитуда импульсов U2 меньше, чем на первом выходе, т.е. U2<U1 (на втором выходе, при необходимости, может изменяться также частота или иные параметры выходных импульсов). Тем самым на носителе формируются участки сигналограммы во время остановки (стоянки) транспортного средства. Различие в амплитуде импульсов записи в обоих режимах записи позволяет в дальнейшем, при воспроизведении, отличить соответствующие участки сигналограммы (фиг.3).
Если время стоянки транспортного средства настолько продолжительное, что магнитная лента в аппарате 1 магнитной записи протягивается на длину, близкую к ее полной длине, то для исключения потерь ранее записанной информации о скорости движения транспортного средства на участке пути перед остановкой (а эта информация важна, если остановка транспортного средства произошла вследствие аварии или дорожного происшествия) включение и выключение третьего привода 4 производятся с задержкой через реле 10 времени.
Генератор 8 стирания и стирающая магнитная головка 7 обеспечивают в режиме записи стирание ранее записанной информации; в режиме воспроизведения генератор 8 отключен (цепи управления этим генератором не показаны).
В режиме воспроизведения устройство работает следующим образом.
По команде с пункта приема и контроля блок 9 управления включает только второй привод 3 механизма транспортирования (остальные приводы при этом отключены), электродвигатель которого обеспечивает движение носителя 5 с постоянной скоростью, значительно большей скорости протягивания этого носителя в режимах записи. К выходу универсальной магнитной головки 6 через первый разделительный блок 15 с помощью первого переключателя 12 подключается в этом режиме блок 14 воспроизведения. Кроме того, включается фотоэлектрический датчик 16 меток носителя. При прохождении метки датчик формирует короткий импульс, который поступает на вход управления блока 14 воспроизведения и, суммируясь в этот момент с сигналом воспроизведения универсальной магнитной головки 6, увеличивает амплитуды выходного сигнала до значения U3 (фиг.3). Эти импульсы увеличенной амплитуды служат отметками длины протянутого носителя, которая прямо пропорциональна длине пройденного пути.
Когда лента в аппарате 1 магнитной записи будет протянута на полную длину, процесс воспроизведения завершается. Блок 9 управления при этом обеспечивает небольшую дополнительную протяжку носителя на длину, меньшую расстояния между магнитными головками 6 и 7, с включением в этот момент режима стирания. Этот «стертый участок» без импульсов записи может служить меткой прохождения пункта контроля.
Для передачи записанной информации по радиоканалу на пункт приема и контроля эта информация поступает на вход второго распределительного блока 22.
Высокочастотное колебание
uc1(t)=Uc1·Cos(2πfc1t+φс1), 0≤t≤Tc1,
где Uc1, fc1, φc1, Tc1 - амплитуда, несущая частота, начальная фаза и длительность колебания;
с выхода задающего генератора 23 поступает на первый вход фазового манипулятора 24 и на два входа перемножителя 48. На выходе последнего образуется высокочастотное колебание
uc2(t)=Uc2·Cos(2πfc2t+φс2), 0≤t≤Tc1,
где  ;
;
fc2=2fc2; φc2=2φc1,
которое выделяется узкополосным фильтром 49 и поступает на первый вход второго фазового манипулятора 50.
На второй вход первого фазового манипулятора 24 подается модулирующий код M1(t) с первого выхода второго распределительного блока 22. Модулирующий код M1(t) содержит в цифровом виде информацию о номерном знаке автомобиля, его цвете и паспортные данные о владельце. Кроме того, модулирующий код M1(t) содержит в цифровом виде информацию о величине давления в тормозной системе, контролируемой датчиком 18, о состоянии приборов сигнализации, контролируемом датчиком 19, о состоянии фар (ближний или дальний свет), контролируемом датчиком 20. На выходе фазового манипулятора 24 образуется фазоманипулируемый (ФМн) сигнал
u1(t)=Uc1·Cos[2πfc1t+φк1(t)+φс1], 0≤t≤Тс1,
где φк1(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t), причем φк1(t)=const при Kτэ<t<(K+1)τэ и может изменяться скачком при t=Кτэ, т.е. на границах между элементарными посылками (радиоимпульсами) (K=1, 2,…,N1-1);
τэ, N1 - длительность и количество элементарных посылок (радиоимпульсов), из которых составлен сигнал длительностью Tc1 (Tc1=N1·τэ);
который поступает на первый вход частотного манипулятора 25. На второй вход частотного манипулятора 25 подается модулирующий код M2(t), который в цифровом виде содержит информацию о скорости транспортного средства. На выходе частотного манипулятора 25 образуется сложный сигнал с комбинированной фазовой и частотной манипуляцией (ФМн-ЧМн)
u2(t)=Uc1·Cos[2πfmt+φк1(t)+φс1], 0≤t≤Tc1,
где m=1, 2;  .
.
Этот сигнал поступает на первый вход амплитудного модулятора 26, на второй вход которого подается аналоговая модулирующая функция m(t), отображающая усилия сжатия водителем («хватка») рулевого колеса. На выходе амплитудного модулятора 26 образуется сложный сигнал с комбинированной фазовой манипуляцией, частотной манипуляцией и амплитудной модуляцией (ФМн-ЧМн-AM)
u3(t)=Uc1·[1+m(t)]·Cos[2πfmt+φк1(t)+φc1], 0≤t≤Tc1,
где m(t) - модулирующая функция амплитудной модуляции.
Этот сигнал поступает на первый вход сумматора 54.
Для определения географических координат ДТП используются приемная антенна 51 и приемник GPS-сигналов 52, которые обеспечивают прием специального навигационного сигнала в виде бинарного ФМн-сигнала, манипулированного по фазе псевдослучайной последовательностью длиной 1023 символа. В сигнале зашифровываются два кода. Один из них - код C/A - доступен широкому кругу гражданских потребителей. Он позволяет получать лишь приблизительную оценку местоположения транспортного средства, поэтому называется грубым кодом. Другой код - Р - обеспечивает более точное вычисление координат, но пользоваться им способны не все, доступ к нему ограничивается провайдером услуг GPS. Компьютер 53 обеспечивает определение местоположения транспортного средства, попавшего в ДТП, которое в виде модулирующего кода M3(х) поступает на второй вход второго фазового манипулятора 50. На выходе фазового манипулятора 50 формируется ФМн-сигнал
u4(t)=Uc2·Cos[2πfc2t+φк2(t)+φс2], 0≤t≤Tc,
где φк2(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M3(t),
который поступает на второй вход сумматора 54. На выходе сумматора 54 образуется суммарный сигнал
uΣ1(t)=U3(t)+U4(t)=Uc1·[1+m(t)·Cos[2πfmt+φк1(t)+φc1]+Uc2·Cos[2πfc2t+φк2(t)+φc2], 0≤t≤Tc1,
который после усиления в усилителе 27 мощности поступает в передающую антенну 28, излучается ею в эфир и улавливается приемной антенной 29 на пункте приема и контроля. При этом усилитель 30 высокой частоты настроен на частоту  , а усилитель 55 высокой частоты на частоту fc2.
, а усилитель 55 высокой частоты на частоту fc2.
Напряжение u3(t) с выхода усилителя 30 высокой частоты поступает на первый (информационный) вход синхронного детектора 32 и на вход амплитудного ограничителя 31, где оно усиливается и ограничивается по амплитуде
u5(t)=U0·Cos[2πfmt+φк1(t)+φc1],
где U0 - порог ограничения.
Полученный сигнал используется в качестве опорного напряжения и подается на второй (опорный) вход синхронного детектора 32, на выходе которого образуется низкочастотное напряжение
uн1(t)=Uн1·[1+m(t)],
где  ,
,
пропорциональное модулирующей функции m(t), которое фиксируется блоком 33 регистрации.
Напряжение u5(t) с выхода амплитудного ограничителя 31 одновременно поступает на входы удвоителя 34 фазы, частотного демодулятора 41, фазовых детекторов 43 и 44.
При удвоении фазы сплошной спектр ФМн-ЧМн-сигнала сворачивается в N1 раз и трансформируется в три дискретные составляющие на частотах 2f1, 2f2 и 2fc1.
Ширина спектра Δfc ФМн-ЧМн-сигнала определяется длительностью элементарных посылок τэ
 ,
,
тогда как ширина спектра второй гармоники сигнала определяется длительностью Tc1 сигнала
Следовательно, при удвоении фазы сложного сигнала его спектр сворачивается в N1 раз
 .
.
С помощью блоков 35-37 фазовой автоподстройки частоты осуществляется фильтрация дискретных составляющих, а делители 38-40 фазы на два предназначены для приведения в соответствие частот сигналов синхронизации и принимаемого сигнала. На выходе делителей 38-40 фазы на два образуются следующие гармонические колебания:
u6(t)=U6·Cos(2πf1t+φ1),
u7(t)=U7·Cos(2πf2t+φ2),
u8(t)=U8·Cos(2πfc1t+φc1),
которые поступают на вторые входы фазовых детекторов 43, 44, 46 и частотного демодулятора 41. С выхода последнего двоичная последовательность, переданная с помощью частотной манипуляции и пропорциональная модулирующему коду M2(t), фиксируется блоком регистрации 42. На выходе фазовых детекторов 43 и 44 образуются следующие напряжения:
u9(t)=U9·Cos[2π(fc1-f1)t+φк1(t)+φс1-φ1],
u10(t)=U9·Cos[2π(f2-fc1)t+φк2(t)+φ2-φс1],
где  ,
,
которые суммируются в сумматоре 45
 Суммарное напряжение uΣ2(t) поступает на первый (информационный) вход фазового детектора 46, на второй (опорный) вход которого подается напряжение u8(t) с выхода делителя 40 фазы на два. В результате синхронного детектирования на выходе фазового детектора 46 образуется низкочастотное напряжение
Суммарное напряжение uΣ2(t) поступает на первый (информационный) вход фазового детектора 46, на второй (опорный) вход которого подается напряжение u8(t) с выхода делителя 40 фазы на два. В результате синхронного детектирования на выходе фазового детектора 46 образуется низкочастотное напряжение
uн2(t)=Uн2·Cosφк1(t),
где  ,
,
которое пропорционально модулирующему коду M1(t) и фиксируется блоком 47 регистрации.
Фазоманипулированный сигнал u4(t) выделяется усилителем 55 высокой частоты и подается на первый (информационный) вход фазового детектора 60 и на вход удвоителя 56 фазы. На выходе последнего формируется гармоническое напряжение
u11(t)=U11·Cos(4πfc2t+2φс2), 0≤t≤Tc1,
где 
Так как 2φк2(t)={0, 2π}, то в указанном напряжении фазовая манипуляция отсутствует.
Гармоническое напряжение u11(t) выделяется узкополосным фильтром 57 и поступает на вход делителя 58 фазы на два, на выходе которого образуется гармоническое напряжение
u12(t)=U12·Cos(2πfc2t+φc2), 0≤t≤Tc1,
которое выделяется узкополосным фильтром 59 и подается на второй (опорный) вход фазового детектора 60. В результате синхронного детектирования на выходе фазового детектора 60 образуется низкочастотное напряжение
uн3(t)=Uн3·Cosφк2(t),
где  ,
,
пропорциональное манипулирующему коду M3(t), которое фиксируется блоком 61 регистрации.
Модулирующий код M3(t) содержит полезную информацию о географических координатах (долгота, широта) ДТП.
Напряжение
u12(t)=U12·Cos(2πfc2t+φс2),
где fc2=2fc1,
φс2=2(φс1+Δφ),
Δφ - дополнительная разность фаз между колебаниями с частотами fc1 и fc2, обусловленная разной скоростью распространения в дисперсионной среде,
с выхода узкополосного фильтра 59 поступает на вход делителя 62 фазы на два, на выходе которого образуется следующее напряжение
u13(t)=U13·Cos(2πfc1t+φс1+Δφ).
Это напряжение выделяется узкополосным фильтром 63 и подается на первый вход фазометра 64, на второй вход которого подается напряжение u8(t) с выхода делителя 40 фазы на два.
Дополнительная разность фаз между колебаниями с частотами fc1 и fc2, обусловленная разной скоростью распространения волн в дисперсионной среде, равна
где R - расстояние от места ДТП до пункта приема и контроля;
V1 - фазовая скорость распространения колебаний частоты f1;
V2 - фазовая скорость распространения колебаний частоты f2.
Эта разность фаз Δφ измеряется фазометром 64 и поступает в арифметический блок 65, где определяется искомое расстояние
 ,
,
которое фиксируется блоком 66 регистрации.
Запись на магнитной ленте хранится в течение интервала времени, определяемого ее скоростью движения и длиной. При этом непрерывность записи контролируемых параметров на ленту ограниченной длины обеспечивается созданием эффекта «бесконечности» путем склеивания ленты в кольцо и размещения ее в кассетах на роликах в натянутом состоянии с возможностью движения мимо универсальной и стирающей магнитных головок. Запись производится с непрерывным стиранием зарегистрированных параметров так, что на ленте всегда остается информация последних нескольких минут движения транспортного средства до остановки, вызванной аварией или дорожным происшествием. Сохранение записанной информации обеспечивается аппаратом магнитной записи (контейнером), выполняющим роль «черного ящика», который используется при расследовании дорожно-транспортных происшествий и при других спорных случаях.
«Черный ящик» обеспечивает сохранение записи при воздействии ударной перегрузки до 10 ед., статистической распределенной нагрузки до 100 кг/см2 и теплового удара до +100°C в течение 20 минут.
Таким образом, предлагаемое устройство по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает определение на пункте приема и контроля географических координат (долготы и широты) дорожно-транспортного происшествия и расстояния до него.
Для оперативной связи транспортного средства, попавшего в ДТП, с пунктом приема и контроля используется симплексная радиосвязь с двумя несущими частотами, на которых формируются сложные сигналы с фазовой манипуляцией (ФМн) и с комбинированной фазовой манипуляцией, частотной манипуляцией и амплитудной модуляцией (ФМн-ЧМн-АМ).
Указанные сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный сигнал в точке приема может оказаться замаскированным шумами, причем энергия сложного сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов.
Структурная скрытность данных сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Указанные сигналы позволяют применять перспективный вид селекции - структурную селекцию. Это значит, что появляется возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
Анализ полученной по радиоканалам информации от различных транспортных средств на пункте приема и контроля позволяет объективно восстановить всю путевую обстановку на контролируемом участке, например, в период дорожно-транспортного происшествия и установить его виновников, географические координаты и расстояние до происшествия.
Тем самым функциональные возможности устройства расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля параметров движения транспортного средства | 2019 |
|
RU2741668C1 |
| Устройство контроля параметров движения транспортного средства (чёрный ящик) | 2022 |
|
RU2787806C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПРОТИВОТРАНСПОРТНЫХ МИН | 2011 |
|
RU2447509C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2308766C2 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА | 2005 |
|
RU2290059C2 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА КОНТРОЛЯ НАД УЧАСТНИКАМИ ДОРОЖНОГО ДВИЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ ВОЗНИКНОВЕНИЯ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ ПРИ ДОРОЖНОМ ДВИЖЕНИИ | 2011 |
|
RU2467399C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРОТИВОТРАНСПОРТНЫХ МИН | 2001 |
|
RU2212712C2 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2412835C1 |
| SOS-СИСТЕМА ДЛЯ АВТОМАГИСТРАЛЕЙ | 2010 |
|
RU2434299C1 |
| СПОСОБ РАННЕГО ОБНАРУЖЕНИЯ ПОЖАРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2427922C1 |
Устройство относится к области приборостроения и может быть использовано для оперативных регистрации и контроля технического состояния и функционирования автомобилей, а также психофизиологического состояния водителя при расследовании дорожно-транспортных происшествий в качестве «черного ящика». Техническим результатом является расширение функциональных возможностей устройства за счет определения на пункте приема и контроля географических координат дорожно-транспортного происшествия и расстояния до него. Аппаратура устройства, расположенная на транспортном средстве, содержит аппарат магнитной записи, первый, второй и третий приводы механизма транспортирования носителя магнитной записи, универсальную магнитную головку, стирающую магнитную головку, генератор стирания, блок управления, реле времени, колесо транспортного средства, первый и второй переключатели, блок воспроизведения, первый и второй распределительные блоки, датчик меток носителя, источник сигналов записи, датчики состояния тормозной системы, приборов сигнализации, фар, датчик усилия сжатия водителем рулевого колеса, задающий генератор, первый и второй фазовые манипуляторы, частотный манипулятор, амплитудный модулятор, усилитель мощности, передающую антенну, перемножитель, узкополосный фильтр, приемную антенну, приемник GPS-сигналов и компьютер. 4 ил.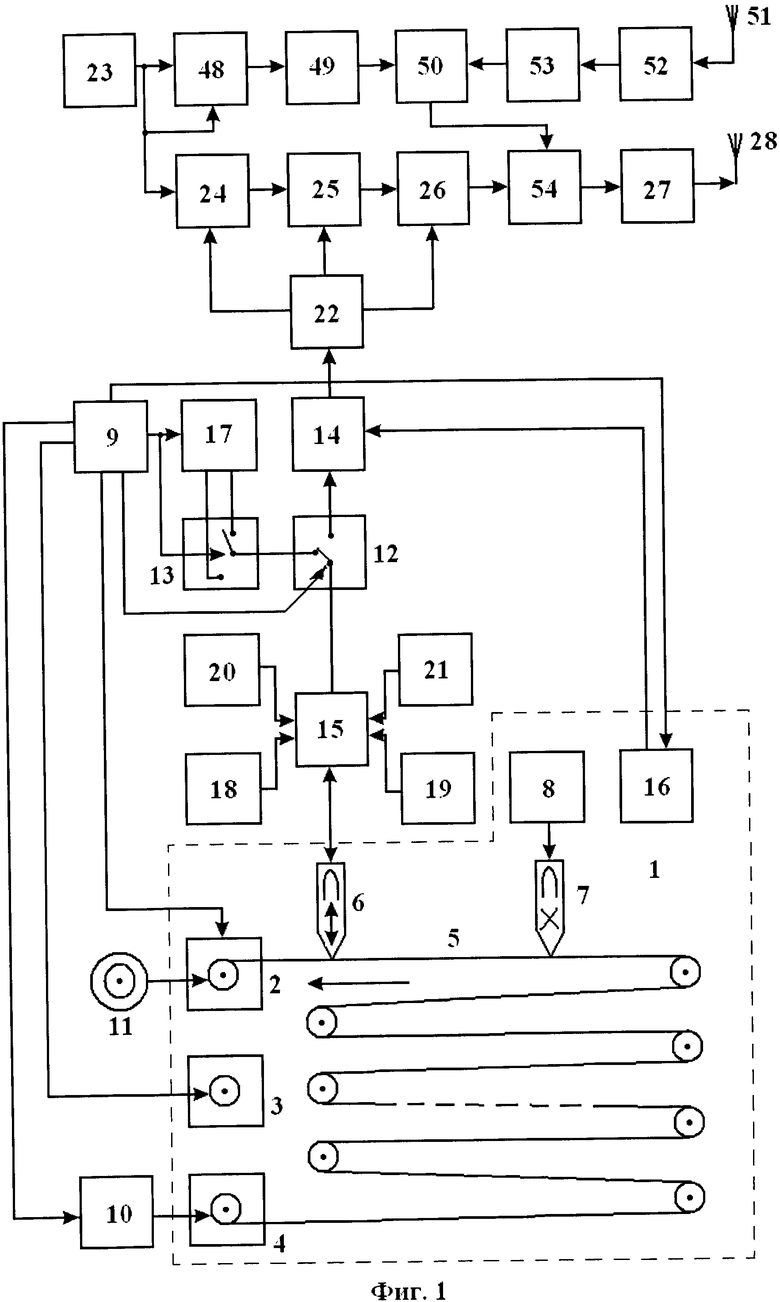
Устройство контроля параметров движения транспортного средства, содержащее на транспортном средстве аппарат магнитной записи, первый привод механизма транспортирования носителя магнитной записи, который кинематически связан с колесом транспортного средства, второй и третий приводы механизма транспортирования носителя магнитной записи, генератор стирания, подключенный к магнитной стирающей головке, универсальную магнитную головку, блок управления, блок воспроизведения, подключенный к выходу первого переключателя, а входом управления - к выходу датчика меток носителя, выполненного в виде фотоэлектрического датчика и подключенного входом к выходу блока управления, реле времени, второй переключатель, первый и второй распределительные блоки, датчик состояния тормозной системы, датчик состояния приборов сигнализации, датчик состояния фар, датчик усилия сжатия водителем рулевого колеса, последовательно включенные задающий генератор, первый фазовый манипулятор, второй вход которого через второй распределительный блок соединен с выходом блока воспроизведения, частотный манипулятор, второй вход которого соединен со вторым выходом второго распределительного блока, и амплитудный модулятор, второй вход которого соединен с третьим выходом второго распределительного блока, и последовательно включенные усилитель мощности и передающую антенну, при этом входы управления первого, второго и через реле времени третьего приводов механизма транспортирования носителя магнитной записи, а также входы управления обоих переключателей связаны с соответствующими выходами блока управления, источник сигналов записи выполнен в виде переключаемого генератора импульсов, входом управления и выходами связанный соответственно со входом управления второго переключателя и его информационными входами, а механизм транспортирования носителя магнитной записи выполнен по кинематической схеме кольцевого накопителя типа «роликовый лабиринт», носитель магнитной записи представляет собой кольцо магнитной ленты с равномерными по длине метками в виде перфораций, универсальная магнитная головка связана через последовательно соединенные первый распределительный блок, к которому подключены датчики состояния тормозной системы, приводов сигнализации, фар и усилия сжатия водителем рулевого колеса, и первый переключатель с выходом второго переключателя либо с выходной шиной блока воспроизведения, на пункте приема и контроля последовательно включенные приемную антенну, первый усилитель высокой частоты, амплитудный ограничитель, синхронный детектор, второй вход которого соединен с выходом первого усилителя высокой частоты, и первый блок регистрации, последовательно подключенные к выходу амплитудного ограничителя первый удвоитель фазы, первый блок фазовой автоподстройки частоты, первый делитель фазы на два, частотный демодулятор, второй вход которого соединен с выходом амплитудного ограничителя, а третий вход через последовательно включенные второй блок фазовой автоподстройки частоты и второй делитель фазы на два соединен с выходом первого удвоителя фазы, и второй блок регистрации, последовательно подключенные к выходу амплитудного ограничителя первый фазовый детектор, второй вход которого соединен с выходом второго делителя фазы, сумматор, второй вход которого через второй фазовый детектор соединен с выходами амплитудного ограничителя и третьего делителя фазы на два, третий фазовый детектор, второй вход которого через последовательно включенные третий блок фазовой автоподстройки частоты и третий делитель фазы на два соединен с выходом первого удвоителя фазы, и третий блок регистрации, отличающееся тем, что оно снабжено на транспортном средстве перемножителем, узкополосным фильтром, приемной антенной, приемником GPS-сигналов, компьютером, вторым фазовым манипулятором и сумматором, причем к выходу задающего генератора последовательно подключены перемножитель, второй вход которого соединен с выходом задающего генератора, узкополосный фильтр, второй фазовый манипулятор и сумматор, второй вход которого соединен с выходом амплитудного модулятора, а выход подключен ко входу усилителя мощности, к выходу приемной антенны последовательно подключены приемник GPS-сигналов и компьютер, выход которого соединен со вторым входом второго фазового манипулятора, на пункте приема и контроля вторым усилителем высокой частоты, вторым удвоителем фазы, тремя узкополосными фильтрами, четвертым и пятым делителями фазы на два, четвертым фазовым детектором, четвертым и пятым блоками регистрации, фазометром и арифметическим блоком, причем к выходу приемной антенны последовательно подключены второй усилитель высокой частоты, второй удвоитель фазы, первый узкополосный фильтр, четвертый делитель фазы на два, второй узкополосный фильтр, четвертый фазовый детектор, второй вход которого соединен с выходом второго усилителя высокой частоты, и четвертый блок регистрации, к выходу второго узкополосного фильтра последовательно подключены пятый делитель фазы на два, третий узкополосный фильтр, фазометр, второй вход которого соединен с выходом третьего делителя фазы на два, арифметический блок и пятый блок регистрации.
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2308766C2 |
| СИСТЕМА СБОРА И АНАЛИЗА ДАННЫХ О ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ | 2003 |
|
RU2222830C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ | 2001 |
|
RU2190238C1 |
| RU 2002109430 А, 10.11.2003 | |||
| US 3841427 А, 15.10.1974 | |||
| US 3898652 А, 05.08.1975. | |||

