Предлагаемое устройство относится к приборостроению и может быть использовано для оперативных регистрации и контроля технического состояния и функционирования автомобилей, а также психофизиологического состояния водителя при расследовании дорожно-транспортных происшествий.
Известны устройства контроля параметров транспортного средства (авт. свид. СССР №№457054, 794575, 915035, 926611, 1327713, 1693622; патент РФ № 2169929; патенты США №№3841427, 3898652 и другие ).
Из известных устройств наиболее близким к предлагаемому является «Устройство контроля параметров движения транспортного средства» (авт. свид. СССР №1693622, G08В 23/00, 1988), которое и выбрано в качестве прототипа.
Данное устройство позволяет организовать дополнительный режим при останове транспортного средства, отличающийся по параметрам от режима записи при движении транспортных средств, с сохранением при этом информации, записанной непосредственно перед остановкой, а также режим воспроизведения с большой постоянной скоростью. Механизм транспонирования носителя магнитной записи выполнен по кинематической схеме кольцевого накопителя типа «роликовый лабиринт», а сам носитель представляет собой кольцо магнитной ленты с равномерным по его длине метками в виде перфораций. Датчик меток выполнен в виде фотоэлектрического датчика. При воспроизведении его сигналы суммируются с сигналами, воспроизведенными с носителя, и эти сигналы увеличенной амплитуды служат метками времени, соответствующими длине протянутого носителя. Полнота и достоверность контроля повышаются за счет того, что кроме скорости транспортных средств фиксируются время и продолжительность остановок (стоянок), время проследования контрольных пунктов и эти данные объективно зафиксированы на носителе в виде соответствующих участков сигналограммы с физическими, надежно различимыми при воспроизведении, параметрами сигналов. Это позволяет объективно оценить всю путевую обстановку на контролируемом участке пути, например, в период дорожно-транспортного происшествия.
Безопасность дорожного движения в сильной степени зависит от скорости транспортных средств. В зависимости от состояния дорожного покрытия, погоды, времени года и суток для снижения уровня аварийности устанавливается определенная скорость движения транспортных средств.
Однако указанное ограничение не всегда выполняется, что в ряде случаев приводит к дорожно-транспортным происшествиям. Указанное устройство обеспечивает измерение и регистрацию скорости транспортных средств.
Следует отметить, что кроме скорости транспортных средств на безопасность дорожного движения оказывают существенное влияние техническое состояние и функционирование автомобилей, а также психофизиологическое состояние водителей.
Технической задачей изобретения является расширение функциональных возможностей устройства путем регистрации и контроля технического состояния и функционирования транспортного средства, а также психофизиологического состояния водителя до и в момент совершения дорожно-транспортного происшествия и передачи этих данных по радиосигналу на пункт приема и контроля.
Поставленная задача решается тем, что устройство контроля параметров движения транспортного средства, содержащее на транспортном средстве аппарат магнитной записи, первый привод механизма транспортирования носителя магнитной записи, который кинематически связан с колесом транспортного средства, второй и третий приводы механизма транспортирования носителя магнитной записи, генератор стирания, подключенный к магнитной стирающей головке, универсальную магнитную головку, блок управления, блок воспроизведения, подключенный к выходу первого переключателя, вход управления которого связан с выходом датчика меток носителя, выполненного в виде фотоэлектрического датчика, реле времени и второй переключатель, при этом входы управления первого, второго и, через реле времени, третьего приводов механизма транспортирования носителя магнитной записи, а также входы управления обоих переключателей связаны с соответствующими выходами блока управления, а источник сигналов записи выполнен в виде переключаемого генератора импульсов, входом управления соединенного с входом управления второго переключателя, механизм транспортирования носителя магнитной записи выполнен по кинематической схеме кольцевого накопителя типа «роликовой лабиринт», носитель магнитной записи представляет собой кольцо магнитной ленты с равномерными по длине метками в виде перфораций, снабжено на транспортном средстве двумя распределительными блоками, датчиком состояния тормозной системы, датчиком состояния приборов сигнализации, датчиком состояния фар, датчиком усилия сжатия водителем рулевого колеса и последовательно включенными задающим генератором, фазовым манипулятором, второй вход которого через второй распределительный блок соединен с выходом блока воспроизведения, частотным манипулятором, второй вход которого соединен с вторым выходом второго распределительного блока, амплитудным модулятором, второй вход которого соединен с третьим выходом второго распределительного блока, усилителем мощности и передающей антенной, причем универсальная магнитная головка связана через последовательно соединенные первый распределительный блок, к которому подключены датчики состояния тормозной системы, приборов сигнализации, фар и усилия сжатия водителем рулевого колеса, и первый переключатель с источником сигналов записи либо с входной шиной блока воспроизведения, на пункте приема и контроля последовательно включенными приемной антенной, усилителем высокой частоты, амплитудным ограничителем, синхронным детектором, второй вход которого соединен с выходом усилителя высокой частоты, и первым блоком регистрации, последовательно подключенными к выходу амплитудного ограничителя удвоителем фазы, первым блоком фазовой автоподстройки частоты, первым делителем фазы на два, частотным демодулятором, второй вход которого соединен с выходом амплитудного ограничителя, а третий вход через последовательно включенные второй блок фазовой автоподстройки частоты и второй делитель фазы на две соединен с выходом удвоителя фазы, и вторым блоком регистрации, последовательно подключенными к выходу амплитудного ограничителя первым фазовым детектором, второй вход которого соединен с выходом второго делителя фазы на два, сумматором, второй вход которого через второй фазовый детектор соединен с выходом амплитудного ограничителя и третьего делителя фазы на два, третьим фазовым детектором, второй вход которого через последовательно включенные третий блок фазовой автоподстройки частоты и третий делитель фазы на два соединен с выходом удвоителя фазы, и третьим блоком регистрации.
Структурная схема аппаратуры устройства, расположенной на транспортном средстве, представлена на фиг.1. Структурная схема аппаратуры устройства, расположенной на пункте приема и контроля, представлена на фиг.2. Временные диаграммы, поясняющие принцип работы устройства, изображены на фиг.3 и 4. Взаимное расположение частот изображено на фиг.5.
Аппаратура устройства, расположенная на транспортном средстве, содержит аппарат 1 магнитной записи, включающий в себя первый 2, второй 3 и третий 4 приводы механизма транспортирования носителя 5 магнитной записи; сопряженные с носителем 5 универсальную магнитную головку 6 и стирающую магнитную головку 7, подключенную к выходу генератора 8 стирания. Устройство содержит также блок 9 управления, соответствующие выходы которого связаны с входами управления первого 2, второго 3 и, через реле 10 времени, третьего 4 приводов механизма транспортирования, причем первый привод 2 имеет кинематическую связь с колесом 11 транспортного средства; первый 12 и второй 13 переключатели; блок 14 воспроизведения, вход управления которого соединен с выходом датчика 16 меток носителя, вход которого соединен с выходом блока 9 управления, источник 17 сигналов записи, выполненный в виде переключаемого генератора импульсов, входом управления и выходами связанный соответственно с входом управления второго переключателя 13 и с его информационными входами, первый распределительный блок 15, к которому подключены датчики состояния тормозной системы 18, приборов сигнализации 19, фар 20, усилия сжатия водителем рулевого колеса 21 и который связан с универсальной сигнальной головкой 6 и через первый переключатель 12 с источником 17 сигналов записи либо с блоком 14 воспроизведения. Вход управления первого переключателя 12 соединен с соответствующим выходом блока 9 управления. К выходу задающего генератора 23 последовательно подключены фазовый манипулятор 24, второй вход которого через второй распределительный блок 22 соединен с выходом блока 14 воспроизведения, частотный манипулятор 25, второй вход которого соединен с вторым выходом второго распределительного блока 22, амплитудный модулятор 26, второй вход которого соединен с третьим выходом второго распределительного блока 22, усилитель 27 мощности и передающая антенна 28.
Носитель 5 магнитной записи представляет собой кольцо магнитной ленты с равномерными по длине метками в виде перфораций (не показаны). Механизм транспортирования (элементы внутренней структуры которого редукторы, муфты, электродвигатели и т.д. приводов 2...4 - не показаны) выполнены по кинематической схеме кольцевого накопителя типа «роликовый лабиринт», по которому перемещается «бесконечная» магнитная лента, а датчик 16 меток носителя выполнен в виде фотоэлектрического датчика.
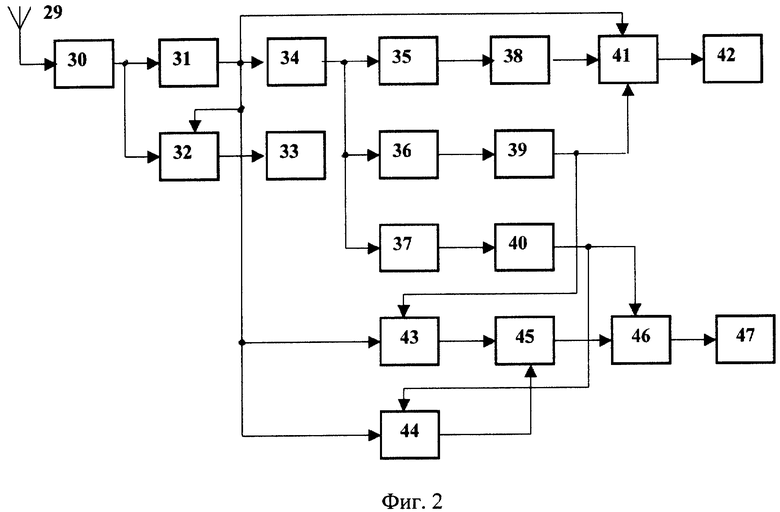
Аппаратура устройства, расположенная на пункте приема и контроля содержит последовательно включенные приемную антенну 29, усилитель 30 высокой частоты, амплитудный ограничитель 31, синхронный детектор 32, второй вход которого соединен с выходом усилителя 30 высокой частоты, и первый блок 32 регистрации. К выходу амплитудного ограничителя 31 последовательно подключены удвоитель 34 фазы, первый блок 35 фазовой автоподстройки частоты, первый делитель 38 фазы на два, частотный демодулятор 41, второй вход которого соединен с выходом амплитудного ограничителя 31, а третий вход через последовательно включенные второй блок 36 фазовой автоподстройки частоты и второй делитель 39 фазы на два соединен с выходом удвоителя 34 фазы, и второй блок 42 регистрации. К выходу амплитудного ограничителя 31 последовательно подключены первый фазовый детектор 43, второй вход которого соединен с выходом второго делителя 39 фазы на два, сумматор 45, второй вход которого через второй фазовый детектор 44 соединен с выходами амплитудного ограничителя 31 и третьего делителя 40 фазы на два, третий фазовый детектор 46, второй вход которого через последовательно включенные третий блок 37 фазовой автоподстройки частоты и третий делитель 40 фазы на два соединен с выходом удвоителя 34 фазы, и третий блок 47 регистрации.
Устройство работает в двух режимах: в режиме записи и в режиме воспроизведения.
В режиме записи устройство работает следующим образом.
Принцип регистрации и контроля технического состояния и функционирования транспортного средства, а также психофизиологического состояния водителя основан на использовании «бесконечной» магнитной ленты, запись на которой хранится в течение интервала времени, определяемого скоростью движения и длиной магнитной ленты. При этом непрерывность записи контролируемых параметров на ленту ограниченной длины обеспечивается созданием эффекта «бесконечности» путем склеивания ленты в кольцо и размещения ее в кассете на роликах в натянутом состоянии с возможностью движения мимо универсальной и стирающей магнитных головок.
При движении транспортного средства от его колеса 11, кинематически связанного с первым приводом 2 механизма транспортирования, начинается движение носителя 5 магнитной записи (в направлении, указанном на фиг.1 стрелкой). Блок 9 управления через переключатели 12 и 13 подключает к универсальной магнитной головке 6 один из выходов генератора 17 (источника сигналов записи), вырабатывающего по этому выходу импульсы постоянной частоты и полной амплитуды U1, которые записываются на носитель 5 и фиксируются на нем в виде магнитных отпечатков. Расстояния между отпечатками вдоль носителя прямо пропорциональны скорости транспортного средства. В результате формируются участки сигналограммы, содержащие информацию о скорости транспортного средства.
На магнитной ленте 5 фиксируются состояние тормозной системы, при этом на ленту 5 записывается величина давления в тормозной системе, контролируемая датчиком 18, состояние приборов сигнализации, контролируемое датчиком 19, состояние фар (ближний или дальний свет), контролируемое датчиком 20, состояние и реакция водителя, контролируемое датчиком 21, как величина давления рук водителя на рулевое колесо, а также временные метки, контролируемые датчиком 16 меток носителя. В качестве датчика 18 давления в тормозной системе могут быть использованы манометры с индуктивным, емкостным или потенциометрическим преобразователем. В качестве датчика 19 состояния приборов сигнализации могут быть использованы герконы, диоды, фоторегистры и световоды. В качестве датчика 20 состояния фар (ближний или дальний свет) могут быть использованы герконы, диоды и световоды.
Таким образом, в режиме записи осуществляется постоянная запись на магнитную ленту 5 контролируемых параметров с привязкой их величин к бортовому времени, отсчет которого ведет датчик 16 меток. Запись хранится в течение интервала времени, определяемого скоростью движения и длиной магнитной ленты. При этом непрерывность записи контролируемых параметров на ленту ограниченной длины обеспечивается созданием эффекта «бесконечности» путем склеивания ленты в кольцо и размещении ее в кассете на роликах в натянутом состоянии с возможностью движения мимо универсальной 6 и стирающей 7 магнитных головок.
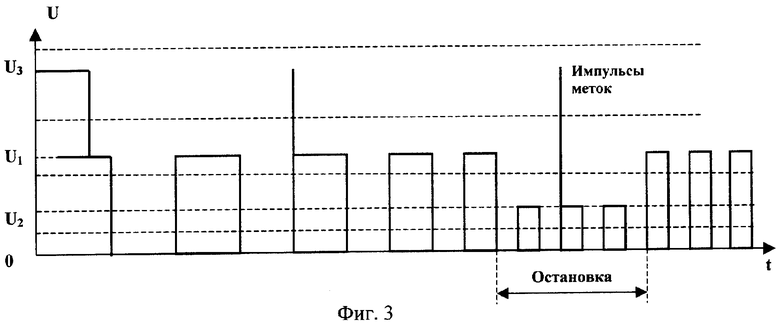
При остановке (или длительной стоянке) в пути первый привод отключается и блок 9 управления включает третий привод 4, приводимый в движение электродвигателем (не показан) с постоянной скоростью; носитель продолжает движение в том же направлении, но уже с малой постоянной скоростью перемещения. Кроме того, в этом режиме с помощью переключателя 13 к магнитной головке 6 подключается другой выход генератора 17, на котором амплитуда импульсов U2 меньше, чем на первом выходе, т.е. U2<U1 (на втором выходе, при необходимости, может изменяться также частота или иные параметры выходных импульсов). Тем самым на носителе формируются участки сигналограммы во время остановки (стоянки) транспортного средства. Различие в амплитуде импульсов записи в обоих режимах записи позволяет в дальнейшем, при воспроизведении, отличить соответствующие участки сигналограммы (фиг.3).
Если время стоянки транспортного средства настолько продолжительное, что магнитная лента в аппарате 1 магнитной записи протягивается на длину, близкую к ее полной длине, то для исключения потерь ранее записанной информации о скорости движения транспортного средства на участке пути перед остановкой (а эта информация важна, если остановка транспортного средства произошла вследствие аварии или дорожного происшествия) включение и выключение третьего привода 4 производится с задержкой через реле 10 времени.
Генератор 8 стирания и стирающая магнитная головка 7 обеспечивают в режиме записи стирание ранее записанной информации; в режиме воспроизведения генератор 8 отключен (цепи управления этим генератором не показаны).
В режиме воспроизведения устройство работает следующим образом.
По команде с пункта приема и контроля блок 9 управления включает только второй привод 3 механизма транспортирования (остальные приводы при этом отключены), электродвигатель которого обеспечивает движение носителя 5 с постоянной скоростью, значительно большей скорости протягивания этого носителя в режимах записи. К выходу универсальной магнитной головки 6 через первый разделительный блок 15 с помощью первого переключателя 12 подключается в этом режиме блок 14 воспроизведения. Кроме того, включается фотоэлектрический датчик 16 меток носителя. При прохождении метки датчик формирует короткий импульс, который поступает на вход управления блока воспроизведения и, суммируясь в этот момент с сигналом воспроизведения универсальной магнитной головки 6, увеличивает амплитуду выходного сигнала до значения U3 (фиг.3). Эти импульсы увеличенной амплитуды служат отметками длины протянутого носителя, которая прямо пропорциональна длине пройденного пути.
Когда лента в аппарате 1 магнитной записи будет протянута на полную длину, процесс воспроизведения завершается. Блок 9 управления при этом обеспечивает небольшую дополнительную протяжку носителя на длину, меньшую расстояния между магнитными головками 6 и 7, с включением в этот момент режима стирания. Этот «стертый участок» без импульсов записи может служить меткой прохождения пункта контроля. Для передачи записанной информации по радиоканалу на пункт приема и контроля эта информация поступает на вход второго распределительного блока 22.
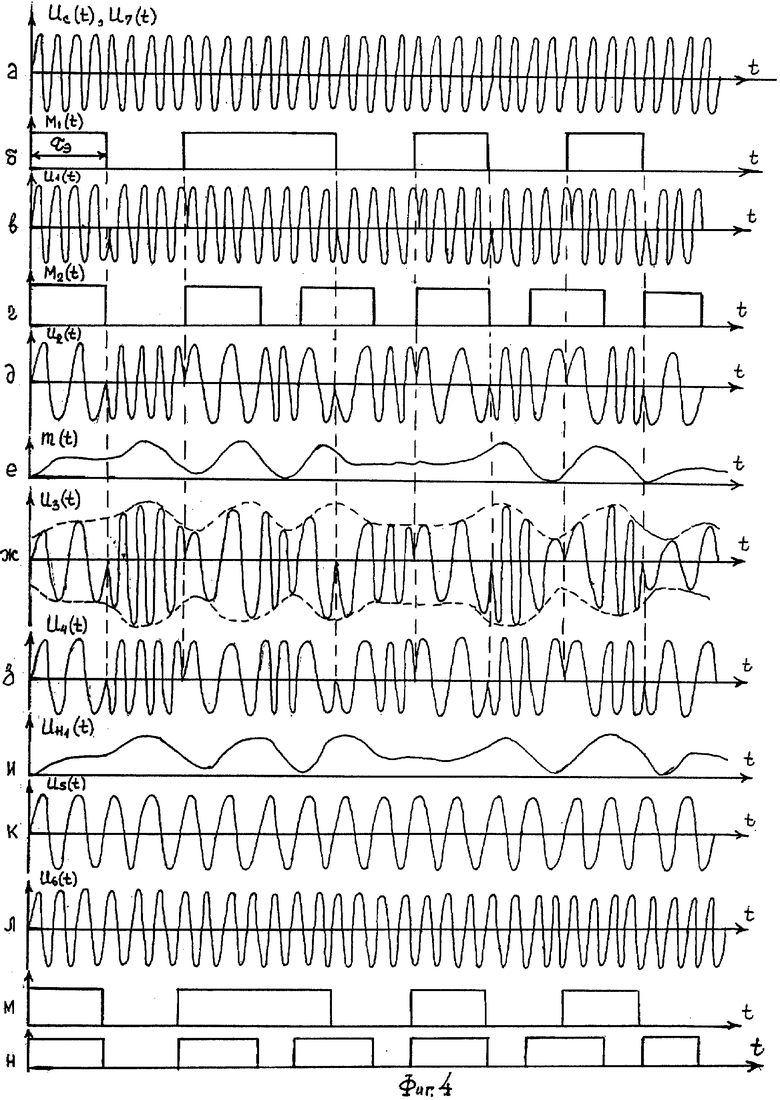
Высокочастотное колебание (фиг.4,а)
 0≤t≤Tc
0≤t≤Tc
где Uc, fc, ϕc, Тc - амплитуда, несущая частота, начальная фаза и длительность колебания;
с выхода задающего генератора 23 поступает на первый вход фазового манипулятора 24, на второй вход которого подается модулирующий код M1(t) с первого выхода второго распределительного блока 22. Модулирующий код M1(t) (фиг.4, б) содержит в цифровом виде информацию о номерном знаке автомобиля, его цвете и паспортные данные о владельце. Кроме того, модулирующий код M1(t) содержит в цифровом виде информацию о величине давления в тормозной системе, контролируемая датчиком 18, о состоянии приводов сигнализации, контролируемое датчиком 19, о состоянии фар (ближний или дальний свет), контролируемое датчиком 20. На выходе фазового манипулятора 24 образуется фазоманипулируемый (ФМн) сигнал (фиг.4, в)
 0≤t≤Tc,
0≤t≤Tc,
где ϕk(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом, причем ϕk(t)=const при
kτЭ<t<(k+1)τЭ и может изменяться скачком при t=kτэ,
т.е. на границах между элементарными посылками
(K=1, 2, ..., N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс(Тс=Nτэ);
который поступает на первый вход частотного манипулятора 25. На второй вход частотного манипулятора 25 подается манипулирующий код M2(t) (фиг.4, г). Модулирующий код M2(t) содержит в цифровом виде информацию о скорости транспортного средства. На выходе частотного манипулятора 25 образуется сложный сигнал с комбинированной фазовой и частотной манипуляцией (ФМн-ЧМн) (фиг.4, д)
 0≤t≤Tc,
0≤t≤Tc,
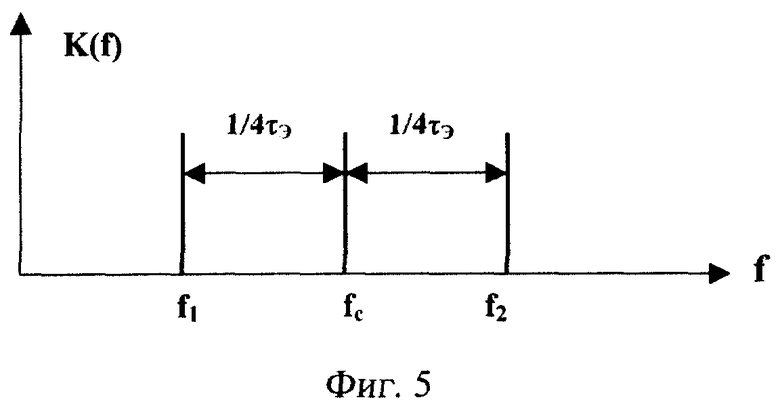
где m=1, 2;  (фиг.5).
(фиг.5).
Этот сигнал поступает на первый вход амплитудного модулятора 26, на второй вход которого подается аналоговая модулирующая функция m(t) (фиг.4, е), отображающая усилия сжатия водителем («хватка») рулевого колеса. На выходе амплитудного модулятора 26 образуется сложный сигнал с комбинированной фазовой манипуляцией, частотной манипуляцией и амплитудной модуляцией (ФМн-ЧМн-AM) (фиг.4, ж)
 0≤t≤Tc,
0≤t≤Tc,
где m(t) - модулирующая функция амплитудной модуляции.
Этот сигнал после усиления в усилителе мощности 27 излучается передающей антенной 28 в эфир и улавливается приемной антенной 29 на пункте приема и контроля. Через усилитель 30 высокой частоты данный сигнал поступает на информационный вход синхронного детектора 32 и на вход амплитудного ограничителя 31, где он усиливается и ограничивается по амплитуде (фиг.4, з)
 0≤t≤Tc,
0≤t≤Tc,
где U0 - порог ограничения.
Полученный сигнал используется в качестве опорного напряжения и подается на опорный вход синхронного детектора 32, на выходе которого образуется низкочастотное напряжение (фиг.4, и)

где  ;
;
К1 - коэффициент передачи синхронного детектора;
пропорциональное модулирующей функции m(t) (фиг.4, е), которое фиксируется блоком 33 регистрации.
Напряжение u4(t) (фиг.4, з) с выхода амплитудного ограничителя 31 одновременно поступает на входы удвоителя 34 фазы, частотного демодулятора 41, фазовых детекторов 43 и 44. При удвоении фазы сплошной спектр ФМн-ЧМн - сигналы сворачиваются в N раз и трансформируются в три дискретные составляющие 2f1, 2f2, и 2fc. Ширина спектра Δfc ФМн-ЧМн - сигнала определяется длительностью элементарных посылок  тогда как ширина спектра Δf2 второй гармоники сигнала определяется длительностью Тc сигнала (Δf2=1/Tc). Следовательно, при удвоении фазы спектра сигнала сворачивается в N раз (
тогда как ширина спектра Δf2 второй гармоники сигнала определяется длительностью Тc сигнала (Δf2=1/Tc). Следовательно, при удвоении фазы спектра сигнала сворачивается в N раз ( ). С помощью блоков 35-37 фазовой автоподстройки частоты осуществляется фильтрация дискретных составляющих, а делители 38-40 фазы на два предназначены для приведения в соответствие частот сигналов синхронизации и принимаемого сигнала. На выходе делителей 38-40 фазы на два образуются следующие гармонические колебания (фиг.4, к, л, а)
). С помощью блоков 35-37 фазовой автоподстройки частоты осуществляется фильтрация дискретных составляющих, а делители 38-40 фазы на два предназначены для приведения в соответствие частот сигналов синхронизации и принимаемого сигнала. На выходе делителей 38-40 фазы на два образуются следующие гармонические колебания (фиг.4, к, л, а)



которые поступают на вторые входы фазовых детекторов 43, 44, 46 и частотного демодулятора 41. С выхода последнего двоичная последовательность (фиг.4, н), переданная с помощью частотной манипуляции, фиксируется блоком 42 регистрации.
На выходе фазовых детекторов 43 и 44 образуются следующие напряжения:
 ,
,

где  ;
;
К2 - коэффициент передачи фазовых детекторов; которые суммируются в сумматоре 45
 и поступают на информационный вход фазового детектора 46. В результате синхронного детектирования на выходе фазового детектора 46 образуется низкочастотное напряжение (фиг.4, м)
и поступают на информационный вход фазового детектора 46. В результате синхронного детектирования на выходе фазового детектора 46 образуется низкочастотное напряжение (фиг.4, м)
 ,
,
где  ,
,
которое пропорционально модулирующему коду M1(t) (фиг.4, б) и фиксируется блоком 47 регистрации.
Таким образом, предлагаемое устройство по сравнению с прототипом обеспечивает не только измерение и регистрацию скорости транспортного средства, но и измерение, регистрацию других контролируемых параметров, характеризующих техническое состояние и функционирование транспортного средства, а также психофизиологическое состояние водителя, на «бесконечную» магнитную ленту. Запись на магнитной ленте хранится в течение интервала времени, определяемого ее скоростью движения и длиной. При этом непрерывность записи контролируемых параметров на ленту ограниченной длины обеспечивается созданием эффекта «бесконечности» путем склеивания ленты в кольцо и размещении ее в кассете на роликах в натянутом состоянии с возможностью движения мимо универсальной и стирающей магнитных головок. Запись производится с непрерывным стиранием зарегистрированных параметров так, что на ленте всегда остается информация последних нескольких минут движения транспортного средства до остановки, вызванной аварией или дорожным происшествием. Сохранение записанной информации обеспечивается аппаратом магнитной записи (контейнером), выполняющим роль «черного ящика», который используется при расследовании дорожно-транспортных происшествий и при других спорных случаях.
Для оперативной связи транспортного средства с пунктом приема и контроля используется радиоканал одной несущей частоты, на которой формируется сложный сигнал с комбинированной фазовой манипуляцией, частотной манипуляцией и амплитудной модуляцией (ФМн-ЧМн-AM).
Данные сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный сигнал в точке приема может оказаться замаскированным шумами. Причем энергия сложного сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов.
Структурная скрытность сложных сигналов обусловлена большим разнообразием их форм и значительными диапазонами излучения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Указанные сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени.
Анализ полученной по радиоканалам информации от различных транспортных средств на пункте приема и контроля позволяет объективно восстановить всю путевую обстановку на контролируемом участке. Например, в период дорожно-транспортного происшествия и установить его виновников.
| название | год | авторы | номер документа |
|---|---|---|---|
| SOS-СИСТЕМА ДЛЯ АВТОМАГИСТРАЛЕЙ | 2005 |
|
RU2282897C1 |
| КОГЕРЕНТНАЯ РАДИОЛИНИЯ | 2005 |
|
RU2286026C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ПЕРЕДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2348552C1 |
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОПЛЕРОВСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2008 |
|
RU2368550C1 |
| МОНИТОРНАЯ СИСТЕМА ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2008 |
|
RU2371085C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ТЕРРОРИСТИЧЕСКОГО АКТА С ИСПОЛЬЗОВАНИЕМ САМОЛЕТА И СИСТЕМА ПРЕДОТВРАЩЕНИЯ ТЕРРОРИСТИЧЕСКОГО АКТА С ИСПОЛЬЗОВАНИЕМ САМОЛЕТА | 2007 |
|
RU2349511C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
| СПАСАТЕЛЬНАЯ СИСТЕМА | 2007 |
|
RU2339972C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2363009C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2007 |
|
RU2339925C1 |
Изобретение относится к приборостроению и может быть использовано для оперативных регистрации и контроля технического состояния и функционирования автомобилей, а также психофизиологического состояния водителей при расследовании дорожно-транспортных происшествий. Технической задачей изобретения является расширение функциональных возможностей устройства путем регистрации и контроля технического состояния и функционирования транспортного средства, а также психофизиологического состояния водителя до и в момент совершения дорожно-транспортного происшествия и передачи этих данных по радиоканалу на пункт приема и контроля. В состав устройства входит аппаратура, расположенная на транспортном средстве и предназначенная для записи носитель магнитной записи, воспроизведения и передачи по радиоканалу информации как о состоянии транспортного средства, так и о состоянии водителя, а также аппаратура, расположенная на пункте приема и контроля. 5 ил.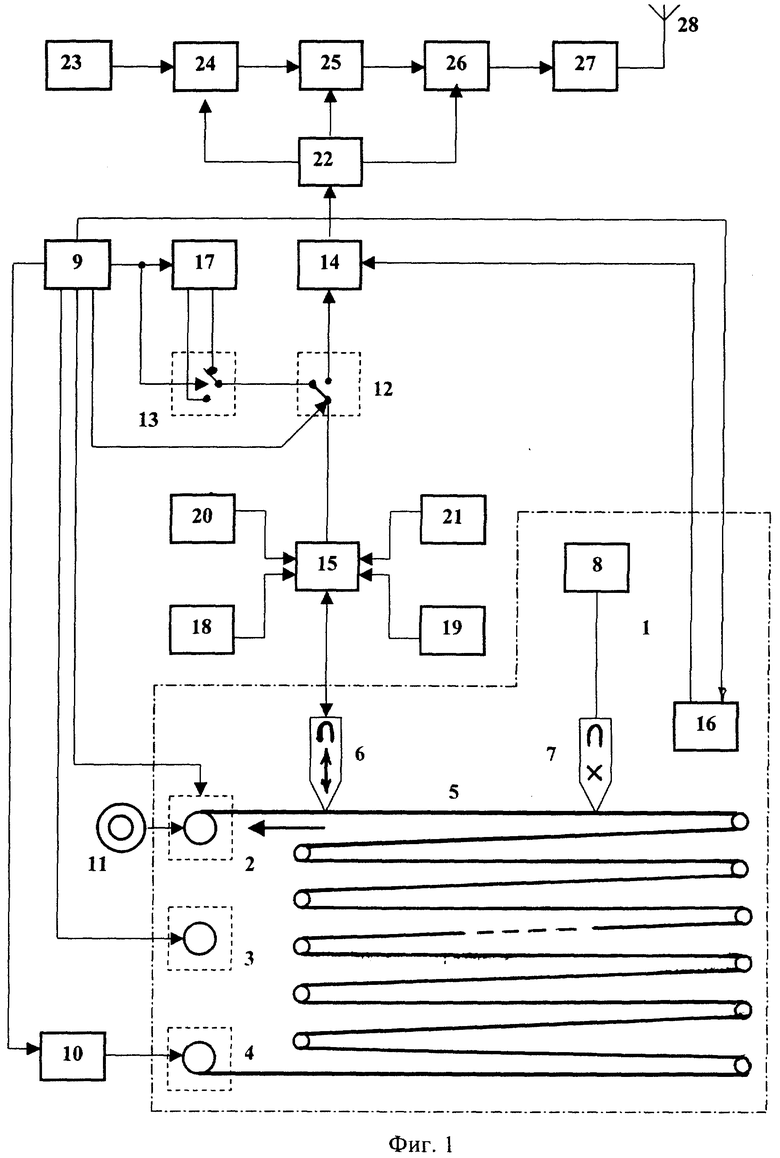
Устройство контроля параметров движения транспортного средства, содержащее на транспортном средстве аппарат магнитной записи, первый привод механизма транспортирования носителя магнитной записи, который кинематически связан с колесом транспортного средства, второй и третий приводы механизма транспортирования носителя магнитной записи, генератор стирания, подключенный к магнитной стирающей головке, универсальную магнитную головку, блок управления, блок воспроизведения, подключенный к выходу первого переключателя, а входом управления - к выходу датчика меток носителя, выполненного в виде фотоэлектрического датчика и подключенного входом к выходу блока управления, реле времени и второй переключатель, при этом входы управления первого, второго и, через реле времени, третьего приводов механизма транспортирования носителя магнитной записи, а также входы управления обоих переключателей связаны с соответствующими выходами блока управления, а источник сигналов записи выполнен в виде переключаемого генератора импульсов, входом управления соединенного с входом управления второго переключателя, механизм транспортирования носителя магнитной записи выполнен по кинематической схеме кольцевого накопителя типа "роликовый лабиринт", носитель магнитной записи представляет собой кольцо магнитной ленты с равномерными по длине метками в виде перфораций, отличающееся тем, что оно снабжено на транспортном средстве двумя распределительными блоками, датчиком состояния тормозной системы, датчиком состояния приборов сигнализации, датчиком состояния фар, датчиком усилия сжатия водителем рулевого колеса и последовательно включенными задающим генератором, фазовым манипулятором, второй вход которого через второй распределительный блок соединен с выходом блока воспроизведения, частотным манипулятором, второй вход которого соединен с вторым выходом второго распределительного блока, амплитудным модулятором, второй вход которого соединен с третьим выходом второго распределительного блока, усилителем мощности и передающей антенной, причем универсальная магнитная головка связана через последовательно соединенные первый распределительный блок, к которому подключены датчики состояния тормозной системы, приборов сигнализации, фар и усилия сжатия водителем рулевого колеса, и первый переключатель с источником сигналов записи либо с выходной шиной блока воспроизведения, на пункте приема и контроля последовательно включенными приемной антенной, усилителем высокой частоты, амплитудным ограничителем, синхронным детектором, второй вход которого соединен с выходом усилителя высокой частоты, и первым блоком регистрации, последовательно подключенными к выходу амплитудного ограничителя удвоителем фазы, первым блоком фазовой автоподстройки частоты, первым делителем фазы на два, частотным демодулятором, второй вход которого соединен с выходом амплитудного ограничителя, а третий вход через последовательно включенные второй блок фазовой автоподстройки частоты и второй делитель фазы на два соединен с выходом удвоителя фазы, и вторым блоком регистрации, последовательно подключенными к выходу амплитудного ограничителя первым фазовым детектором, второй вход которого соединен с выходом второго делителя фазы на два, сумматором, второй вход которого через второй фазовый детектор соединен с выходами амплитудного ограничителя и третьего делителя фазы на два, третьим фазовым детектором, второй вход которого через последовательно включенные третий блок фазовой автоподстройки частоты и третий делитель фазы на два соединен с выходом удвоителя фазы, и третьим блоком регистрации.
| Устройство контроля параметров движения транспортного средства | 1988 |
|
SU1693622A1 |
| УСТРОЙСТВО ДЛЯ ЗАМЕРА И ФИКСАЦИИ ПАРАМЕТРОВ ДВИЖЕНИЯ И СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА, А ТАКЖЕ ФИКСАЦИИ ОКРУЖАЮЩЕЙ ОБСТАНОВКИ | 2003 |
|
RU2219584C1 |
| СИСТЕМА СБОРА И АНАЛИЗА ДАННЫХ О ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ | 2003 |
|
RU2222830C1 |
| US 2004078125 A1, 22.04.2004. | |||

