Изобретение относится к системам обеспечения безопасности дорожного движения и предназначено для контроля параметров движения и состояния транспортного средства (ТС), а также для информационной поддержки служб оперативного реагирования при оказании помощи пострадавшим в дорожно-транспортном происшествии (ДТП).
В современных условиях автомобилизации общества одним из важных направлений обеспечения безопасности дорожного движения является контроль за соблюдением водителями ТС скоростного режима, предупреждение аварийной ситуации, а в случае, когда ДТП все же произошло, - своевременное оказание квалифицированной помощи пострадавшим и создание необходимых условий для объективного расследования ДТП.
В связи с этим весьма актуальным направлением развития автоэлектроники является создание технических средств, позволяющих получать объективную и достоверную информацию о состоянии ТС, водителя и пассажиров в процессе движения ТС по трассе, и, в случаях возникновения ДТП, оперативно анализировать указанную информацию с привлечением внешних информационных источников, и использовать результаты этого анализа при экспертизе и принятии решений об оказании экстренной медицинской помощи и спасении пострадавших в ДТП.
К указанному классу технических средств относятся регистраторы маршрутных данных, или тахографы, установка которых на крупнотоннажных грузовых ТС и в многоместных автобусах является обязательным условием перевозок грузов и людей. Тахограф представляет собой автоматическое бортовое устройство, устанавливаемое взамен спидометра или совместно с ним и предназначенное для непрерывной индикации и регистрации скорости движения, пробега ТС и периодов труда и отдыха водителя ТС. Материалы об этих устройствах представлены, например, на Web-сервере журнала "За рулем".
Недостатки штатных тахографов обусловлены применяемой в них устаревшей технологией регистрации с помощью самописца данных на бумажном носителе.
Более технически совершенными и удобными в пользовании являются цифровые регистраторы маршрутных данных.
Так, в патенте US 4188618, G 08 G 17/00, 12.02.1980 описан цифровой тахограф для записи параметров ТС, содержащий установленный на борту ТС измеритель динамических параметров ТС, который содержит измеритель скорости ТС и выполнен с возможностью непрерывной записи цифровых данных, соответствующих другим измеренным параметрам ТС (скорости вращения вала двигателя, расходу горючего и др.), цифровой дисплей, выполненный с возможностью оперативного выборочного отображения мгновенных значений измеренных параметров ТС, блок хранения данных, выполненный с возможностью установки на борту ТС для непрерывного приема и записи сигналов, соответствующих измеряемым параметрам ТС, установленный вне ТС компьютерный терминал, а также канал связи, выполненный с возможностью оперативной передачи из установленного на борту ТС блока хранения данных в компьютерный терминал выбранных фрагментов записей параметров ТС, при этом компьютерный терминал выполнен с возможностью выборочного считывания данных с борта ТС.
Указанное техническое решение реализовано, в частности, в цифровом регистраторе BR-6800/6802 фирмы Baoruh Electronic Co, Ltd. (Тайвань). Он включает в себя 32-битный микроконтроллер, флэш-память на 128 Кбайт и память на жестком диске на 8 Мбайт с возможностью расширения до 128 Мбайт, имеет 16 входов для записи цифровых сигналов, 8 входов для записи аналоговых сигналов и 7 цифровых выходов. Считываемая из флэш-памяти информация может быть передана по каналам связи в центр обработки для последующего анализа (www.baomh. com.tw).
Регистратор BR-6800/6802 является универсальным прибором, который может быть установлен на различных типах ТС в качестве дополнительного электронного оборудования. С одной стороны, такая универсальность является достоинством данного прибора, а, с другой стороны, его недостатком, поскольку обуславливает его высокую стоимость. Кроме того, регистратор BR-6800/6802 недостаточно эффективен при ДТП, поскольку на аварийном участке (от начала ДТП до полной остановки ТС) требуются более полный набор записываемых параметров движения и более высокая разрешающая способность записей, чем способен обеспечить вышеупомянутый регистратор. Кроме того, должна быть обеспечена возможность оперативной передачи данных в соответствующие службы, например в диспетчерские центры скорой неотложной медицинской помощи, в службу спасения и т.п.
Способностью передачи данных о состоянии ТС, водителя и пассажиров во время ДТП обладает система поддержки принятия решений по патенту US 2002/0103622, G 06 F 15/00, 01.08.2002. Эта система включает в себя установленные на борту ТС измерители параметров движения ТС, датчики, выполненные с возможностью определения состояния узлов и агрегатов ТС и биометрических данных, указывающих на физические состояния водителя и пассажиров ТС, а также другие бортовые средства измерений, подключенные с помощью общей шины к бортовой подсистеме обработки данных, включающей в себя процессорный блок обработки данных, связанный через интерфейс с общей шиной, блок хранения информации, блок определения местоположения ТС, например GPS-приемник, и приемопередатчик с антенной для беспроводной связи с центром управления, включающим в себя подсистему сбора и обработки данных о ДТП, которая с помощью одной или нескольких стандартных сетей связи, например радиосети подвижной связи стандарта GSM, подключена к внешним источникам информации, относящейся к ДТП, в качестве которых могут выступать центры экстренной и медицинской помощи, травмопункты, госпитали и т.п., при этом блок хранения информации, блок определения местоположения ТС и приемопередатчик связаны с блоком обработки данных, а центр управления выполнен с возможностью передачи данных в центры скорой медицинской помощи, в службу спасения и другие организации, обладающие силами и средствами для оперативного реагирования и экстренной помощи пострадавшим в ДТП.
Недостатком данной системы является то, что в ней отсутствуют средства, позволяющие использовать дополнительное бортовое оборудование (бортовые измерители, подсистему обработки данных и др.) в штатном режиме эксплуатации ТС, а не только для фиксации параметров, характеризующих ДТП. Это значительно сужает сферу применения указанного оборудования, поскольку, как правило, заводы-производители и владельцы ТС отдают предпочтение дополнительному оборудованию двойного (или тройного) применения, которые могут использоваться как в штатном режиме, так и в ДТП. Примером может служить GPS-приемник, который используется одновременно в составе охранно-противоугонных комплексов ТС и в бортовых навигационных системах. Еще более широкое и многофункциональное применение нашел в настоящее время сотовый телефон. Помимо применения по своему прямому назначению в качестве средства подвижной связи, он широко используется для передачи телеметрических данных и управляющих воздействий с борта ТС и обратно.
В качестве прототипа заявленного технического решения выбрана система регистрации параметров движения и состояния ТС по патенту GB 2055469, G 07 C 5/08, 15.07.1980.
Указанная система содержит установленные на ТС аналого-цифровой преобразователь (АЦП), выполненный с возможностью преобразования в цифровую форму аналоговых сигналов, поступающих от измерителя скорости и акселерометра, задающий генератор, обеспечивающий ввод в АЦП с заданной тактовой частотой измеренных значений скорости и ускорения, регистр сдвига, содержащий набор ячеек памяти, достаточный для записи параметров движения ТС в течение времени протекания ДТП и выполненный в виде съемного блока, обеспечивающего пересылку записанных в него данных во внешний микропроцессор, а также блокирующее устройство, выполненное с возможностью прерывания потока цифровых данных, поступающих из АЦП в регистр сдвига при достижении скоростью движения ТС нулевого значения, и внутренний микропроцессор, связанный с регистром сдвига и выполненный с возможностью управления блокирующим устройством через блок задержки.
Главным недостатком системы-прототипа является отсутствие в ней технических возможностей для оперативного дистанционного съема записанных данных, последующей обработки, анализа и поддержки принятия решений об оказании помощи водителю и пассажирам ТС, попавшим в ДТП.
Задачей настоящего изобретения является устранение указанных недостатков системы-прототипа, а именно обеспечение возможности восстановления более полной картины ДТП по данным, полученным различными бортовыми измерителями, а также возможности оперативного анализа этих данных с использованием экспертной информации из внешних источников с целью поддержки принятия решений об оказании экстренной медицинской помощи и о спасении водителя и пассажиров, пострадавших в ДТП.
Поставленная задача решается благодаря тому, что в известную систему сбора и анализа данных о ДТП, содержащую установленные на ТС блок измерителей параметров движения ТС, входящий в состав бортового измерительного узла, АЦП, регистр памяти и решающее устройство, введены навигационный блок, общая шина, к которой подключены вход АЦП и выходы навигационного блока и бортового измерительного узла, блок обработки данных бортовых измерений, блок формирования команд управления и последовательно соединенные блок преобразования формата данных, энергонезависимая память, блок считывания данных и блок беспроводной передачи данных, центр сбора и анализа информации о ДТП, содержащий последовательно соединенные приемник беспроводной связи, связанный по радиоэфиру с установленным на борту ТС блоком беспроводной передачи данных, блок первичной обработки данных, блок вторичной обработки данных и блок поддержки принятия решений, выполненный с возможностью информационной поддержки служб экстренной медицинской помощи и спасения, при этом выход АЦП через блок обработки данных бортовых измерений подключен ко входу регистра памяти, выход которого подключен ко входу блока преобразования формата данных, вход управления которого через блок формирования команд управления соединен с выходом решающего устройства, вход которого связан с выходом АЦП.
Решению поставленной задачи способствуют следующие частные существенные признаки заявленного технического решения.
Блок измерителей параметров движения ТС содержит измеритель путевой скорости ТС, три измерителя ортогональной составляющей угловой скорости и три измерителя ортогональной составляющей ускорения.
Навигационный блок выполнен в виде GPS-приемника глобальной спутниковой системы радионавигации.
Бортовой измерительный узел выполнен с возможностью формирования сигналов, характеризующих состояние узлов и агрегатов ТС, бортовых средств обеспечения безопасности, а также физических состояний водителя и пассажиров.
Блок вторичной обработки данных выполнен с возможностью интеграции различных источников пространственной, в том числе картографической, растровой и векторной, а также семантической и математической информации посредством драйверов различных форматов хранения данных, и с возможностью оперативного доступа к информации, хранящейся в хранилищах и базах данных внешних источников информации.
Блок поддержки принятия решений выполнен с возможностью экспертной оценки характера и тяжести повреждений, полученных водителем и пассажирами ТС в ДТП, и формирования рекомендаций по оказанию им экстренной медицинской помощи и спасению.
Блок поддержки принятия решений содержит лингвистический процессор, связанный с рабочей памятью, интерпретатор, связанный с рабочей памятью и с базой знаний, выполненной с возможностью приема информации от внешних источников, при этом рабочая память выполнена с возможностью ввода информации из блока вторичной обработки данных, а лингвистический процессор - с возможностью взаимодействия с человеком-оператором на ограниченном естественном языке.
Суть предлагаемого изобретения поясняется на фиг.1-5.
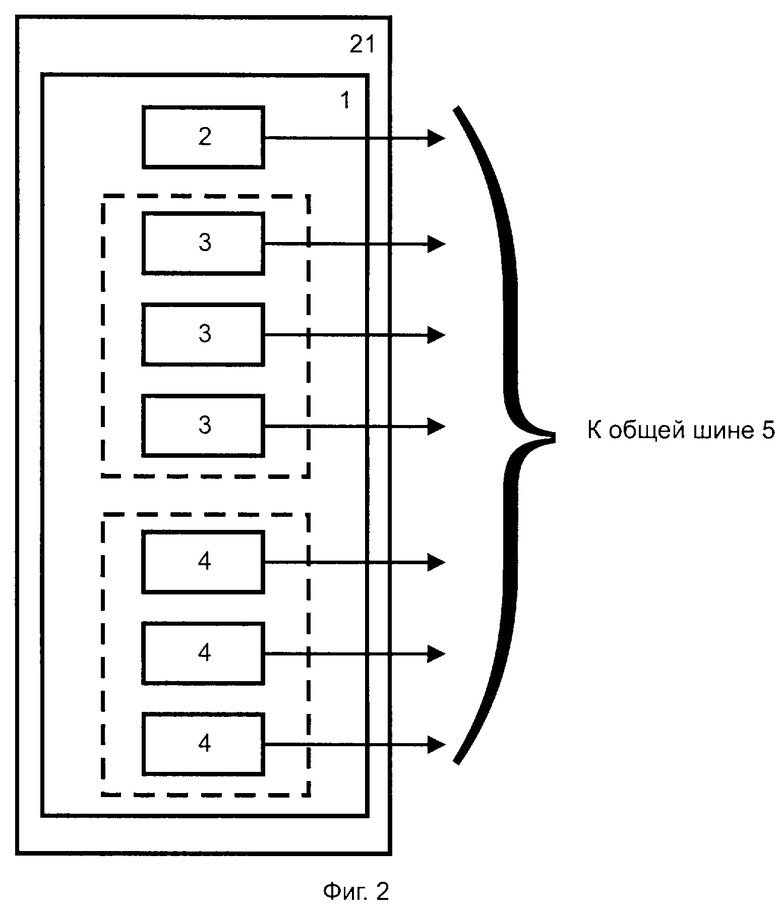
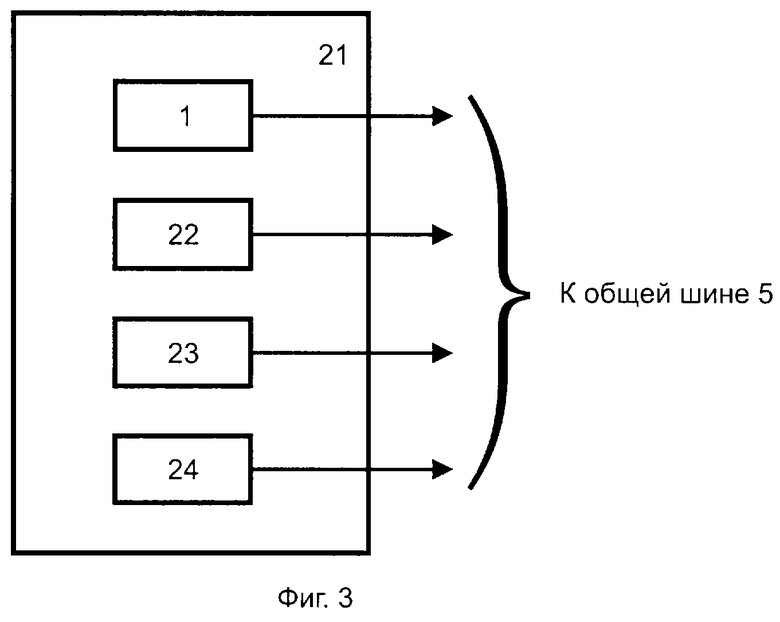
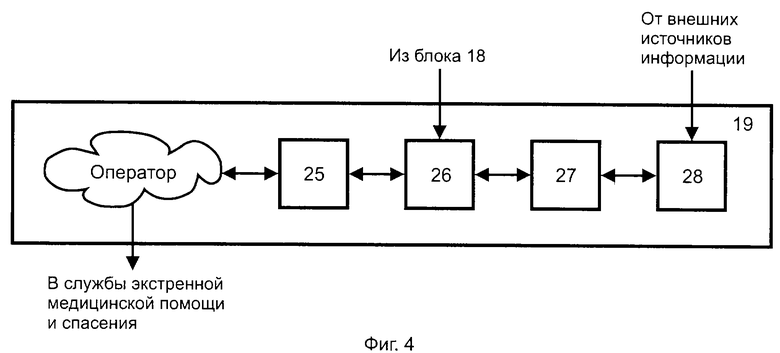
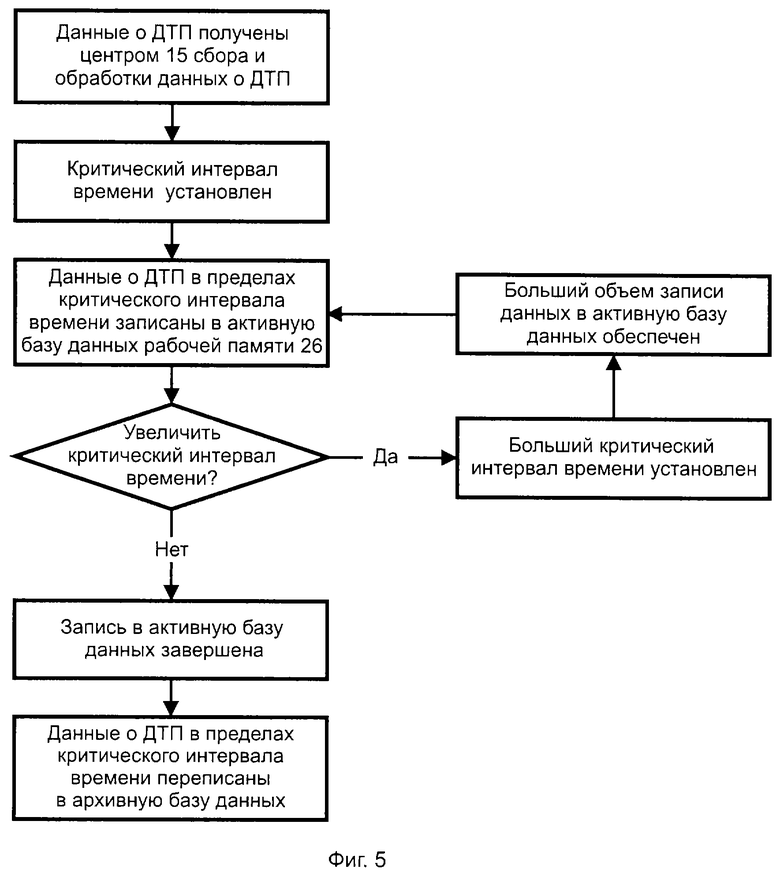
На фиг. 1 представлена структурная схема заявленной системы. На фиг.2 - структурная схема одного из возможных вариантов построения блока измерителей параметров движения ТС. На фиг.3 - структурная схема одного из возможных вариантов построения бортового измерительного узла. На фиг.4 - структурная схема одного из возможных вариантов построения блока поддержки принятия решений. На фиг.5 - алгоритм определения момента времени начала перезаписи данных о ДТП в архивную базу данных рабочей памяти.
На фиг.1-5 использованы следующие обозначения:
1 - блок измерителей параметров движения ТС; 2 - измеритель путевой скорости ТС; 3 - измеритель ортогональной составляющей угловой скорости; 4 - измеритель ортогональной составляющей ускорения; 5 - общая шина; 6 - АЦП; 7 - блок обработки данных бортовых измерений; 8 - регистр памяти; 9 - решающее устройство; 10 - блок формирования команд управления; 11 - блок преобразования формата данных; 12 - энергонезависимая память; 13 - блок считывания данных; 14 - блок беспроводной передачи данных; 15 - центр сбора и анализа информации о ДТП; 16 - приемник беспроводной связи; 17 - блок первичной обработки данных; 18 - блок вторичной обработки данных; 19 - блок поддержки принятия решений; 20 - навигационный блок; 21 - бортовой измерительный узел; 22 - комплекс измерителей состояния узлов и агрегатов ТС; 23 - комплекс бортовых средств обеспечения безопасности; 24 - комплекс измерителей биометрических данных о физических состояниях водителя и пассажиров; 25 - лингвистический процессор; 26 - рабочая память; 27 - интерпретатор; 28 - база знаний.
Система содержит блок 1 измерителей параметров движения ТС, входящий в состав бортового измерительного узла 21.
Общими с прототипом являются измеритель 2 путевой скорости ТС, роль которого могут выполнять спидометр, одометр или тахометр, либо совокупность указанных устройств, и один из измерителей 4 ортогональной составляющей ускорения - акселерометр. Как правило, указанные измерители входят в состав штатного или дополнительного электротехнического оборудования ТС, устанавливаемого на заводе-изготовителе ТС. Вновь введенными являются два измерителя 4 ортогональной составляющей ускорения и три измерителя 3 ортогональной составляющей угловой скорости.
Продольная и две поперечные составляющие ускорения измеряются с помощью трех акселерометров, жестко связанных с корпусом ТС и установленных ортогонально друг другу. Принципы действия автомобильных акселерометров хорошо известны и не требуют дополнительных пояснений.
Три измерителя 3 ортогональной составляющей угловой скорости представляют собой три ортогонально ориентированных гироскопических датчика типа ADXRS 300 (см. информацию фирмы Analog Devices, Inc. на сайте www.analog.com). Указанный датчик сравнительно недавно появился на рынке автомобильной электроники и поэтому его устройство требует дополнительных пояснений.
Датчик ADXRS 300 действует по принципу гироскопического резонатора. Он содержит две многослойные кремниевые чувствительные пластины, каждая из которых находится в вибрирующей рамке, вводимой в состояние резонанса с помощью электростатического поля. Скорость резонансного движения пластин достаточно велика для появления при попытке поворота пластин вокруг осей, перпендикулярных их поверхностям, кориолисовой силы. На двух внешних границах каждой рамки перпендикулярно направлению вибрационных колебаний пластин расположены неподвижные штифты, между которыми находятся подвижные штифты. Штифты расположены друг относительно друга таким образом, что образуют конденсорную тензочувствительную структуру, реагирующую на кориолисово ускорение. Формируемый в такой конденсорной структуре сигнал пропускается через несколько интегрирующих, усиливающих и демодулирующих каскадов электронной схемы. Конструкция датчика позволяет компенсировать воздействие внешних сил и вибраций. Кроме того, встроенная в датчик электроника предохраняет выходной сигнал от воздействия внешних шумов.
Для измерения угловой скорости изменения ориентации направления движения ТС в плоскости его перемещения по дороге достаточно одного датчика ADXRS 300, жестко связанного с корпусом, например с днищем ТС. Для измерения всех трех ортогональных составляющих угловой скорости необходимы соответственно три датчика, установленных во взаимно перпендикулярных плоскостях.
Конструктивно датчик ADXRS 300 выполнен в виде микрочипа размерами (7х7х3) мм и по своим параметрам приспособлен для работы на борту ТС (допускает воздействие высоких перегрузок, а также широкого диапазона минусовых и плюсовых рабочих температур).
Наряду с блоком 1 измерителей параметров движения ТС в состав бортового измерительного узла 21 могут входить также и другие измерители. Так, в варианте, представленном на фиг.3, на борту ТС установлены также комплекс 22 измерителей состояния узлов и агрегатов ТС, комплекс 23 бортовых средств обеспечения безопасности, комплекс 24 измерителей биометрических данных о физических состояниях водителя и пассажиров ТС. Подобный состав бортового измерительного узла 21 представлен, к примеру, в вышеупомянутом патенте US 2002/0103622, G 06 F 15/00, 01.08.2002. Согласно этому изобретению на борту ТС измеряются следующие параметры состояния:
- Параметры состояния узлов и агрегатов ТС
- положения кресел;
- угла наклона рулевой колонки;
- уровня топлива в баке;
- состояния двигателя и др.
- Параметры состояния средств обеспечения безопасности:
- воздушной подушки;
- ремней безопасности и др.
- Параметры состояния водителя и пассажиров ТС:
- температуры тела;
- артериального давления и пр.
Местоположение ТС определяют с помощью навигационного блока 20. Как правило, для этого используют GPS-приемник, принципы работы которого хорошо известны (см. например, статью "Система слежения и безопасности TRACER", "12 Вольт", 1, 2001, с. 62 - 64, патент RU 2122239, G 08 B 25/10, 20.11.1998 и др.).
Измерители (датчики) состояний узлов и агрегатов ТС, позволяющие передавать измеренные данных по общей шине 5, применяются в охранно-противоугонных комплексах элитного и среднего классов, серийно выпускаемых предприятием-заявителем. Их устройство описано, например, в Каталоге "Автомобильные охранные системы", "Альтоника", 2002.
Комплекс 23 бортовых средств обеспечения безопасности и комплекс 24 измерителей биометрических данных о физических состояниях водителя и пассажиров представлены в вышеупомянутом патенте US 2002/0103622, G 06 F 15/00, 01.08.2002.
Выход каждого из вышеуказанных комплексов 22-24, как и выходы блока 1 измерителей параметров движения ТС и навигационного блока 20, подключены к общей шине 5.
Общая шина 5 подключена к АЦП 6. Выход АЦП 6 связан со входом блока 7 обработки данных бортовых измерений, выполненного на базе микроконтроллера, и со входом решающего устройства 9, представляющего собой микропроцессор с внутренней памятью. Блок 7 обработки данных бортовых измерений предназначен для селекции данных, поступающих от различных бортовых измерителей и преобразуемых в цифровую форму в АЦП 6. Также блок 7 предназначен для формирования пакетов данных, посылаемых далее в регистр 8 памяти.
Решающее устройство 9 содержит схему пороговой обработки данных, позволяющую определить моменты достижения определенными параметрами своих критических значений (например, обнуления путевой скорости ТС в момент завершения ДТП), и сформировать соответствующие управляющие воздействия для блока 10 формирования команд управления.
Выход блока 10 формирования команд управления подключен ко входу управления блока 11 преобразования формата данных. Данный вход управления предназначен для приема команд считывания содержимого регистра 8 памяти для преобразования и передачи в энергонезависимую память 12, представляющую собой, к примеру, флэш-память. Емкость регистра 8 памяти выбирается исходя из длины регистрируемого участка траектории ТС и разрешающей способности, необходимых для установления достаточно объективной картины ДТП. Емкость энергонезависимой памяти 12 определяется в основном стоимостными ограничениями (в настоящее время стоимость одного Мбайт флэш-памяти составляет примерно 0,5 долларов США).
Блок 11 преобразования формата данных предназначен также для более экономного использования емкости энергонезависимой памяти 12 при последовательной записи в нее отрезков траектории ТС, поскольку эта информация не уничтожается и предназначена для длительного хранения.
Выход энергонезависимой памяти 12 подключен ко входу блока 13 считывания данных, выход которого подключен ко входу блока 14 беспроводной передачи данных, в качестве которого может использоваться, например, коммерчески доступное терминальное оборудование сотовой подвижной связи REEF GSM-1000, серийно выпускаемое предприятием-заявителем (сертификат соответствия РОСС RU. ME30.B.01155). Принципы работы и характеристики указанного оборудования описаны, например, в журнале "12 Вольт", 3, 2003, с. 18-21.
Блок 14 беспроводной передачи данных связан по радиоэфиру с приемником 16 беспроводной связи, входящим в состав центра 15 сбора и анализа информации о ДТП. При использовании, например, сотовой сети подвижной связи стандарта GSM данные о ДТП передаются в виде стандартных SMS-сообщений, а приемник 16 беспроводной связи выполнен в виде GSM-модема, связанного с блоком 17 первичной обработки данных.
Блок 17 первичной обработки данных представляет собой микропроцессор, предназначенный для селекции различных видов информации (параметров движения и местоположения ТС, параметров узлов и агрегатов ТС, биометрических данных о физических состояниях водителя и пассажиров ТС), и преобразования этой информации в вид, необходимый для ее обработки в блоке 18 вторичной обработки данных с последующей интерпретацией в блоке 19 поддержки принятия решений с использованием дополнительной информации из внешних источников.
Блок 18 вторичной обработки данных предназначен для создания, ведения и поддержания пространственного банка данных о ДТП. Составными частями этого банка являются векторная, семантическая и растровая базы данных, а также банк цифровых моделей местности, например улично-дорожной сети.
Векторная база данных представляет собой хранилище координатного описания объектов, подключенное через специализированный драйвер к соответствующему источнику этой информации.
Семантическая база данных является хранилищем атрибутивного описания объектов (семантические таблицы и классификаторы, связанные с одним или несколькими векторными слоями одной или нескольких векторных баз данных).
Растровая база данных представляет собой набор растровых файлов, логически объединенных в слои, подключенные через специализированные драйверы данного графического формата.
Цифровая модель местности - это графическая интерпретация математического описания данных.
Блок 18 вторичной обработки данных представляет собой программно-аппаратный комплекс, включающий в себя
- сервер картографической (векторной и растровой) информации;
- геоинформационную систему;
- средство пользовательского доступа к пространственным данным из внешних источников;
- подсистему трехмерного моделирования;
- специализированные программные приложения (сервер семантики, редактор стилей, блок контроля топологии, сервер отображения и печати).
В полномасштабном варианте реализации рассматриваемой системы в качестве блока 18 вторичной обработки данных может быть использован программно-аппаратный комплекс "Геобилдер®", серийно выпускаемый и поставляемый фирмой ПК "Геокибернетика" (сертификат соответствия РОСС RU. КР02. С00014).
Описание и принципы функционирования программно-аппаратного комплекса "Геобилдер" представлены в фирменном материале "Комплекс программных средств GeoBuilder", 2002 г. и на сайте www.geobuilder.ru. Возможны и упрощенные варианты построения блока 18 вторичной обработки данных, при которых возможности комплекса "Геобилдер" используются частично.
Блок 19 поддержки принятия решений представляет собой автоматизированное рабочее место оператора, построенное, например, по принципу экспертных систем. Схема обобщенной экспертной системы представлена на фиг.4 (Попов Э.В., "Экспертные системы", М., "Наука", 1987, с. 12).
Экспертная система включает в себя лингвистический процессор 25, с которым взаимодействует человек-оператор, рабочую память 26, в которую поступает информация из блока 18 вторичной обработки данных, интерпретатор 27 и базу знаний 28, подключенную к внешним источникам информации. Лингвистический процессор 25 предназначен для
- преобразования входных данных, представленных на ограниченном естественном языке, в представление на внутреннем языке экспертной системы;
- преобразования сообщений экспертной системы, выраженных на ее внутреннем языке, в сообщения на ограниченном естественном языке.
Лингвистический процессор 25 связан с рабочей памятью 26, которая в свою очередь связана с интерпретатором 27. Интерпретатор 27 представляет собой цифровое логическое устройство, которое на основе входных данных, получаемых из рабочей памяти 26 и из базы знаний 28, формирует с помощью продукционных правил (типа, "если не, то...") решение поставленной задачи.
Различные варианты построения блока 19 поддержки принятия решений при анализе ДТП представлены в описании вышеупомянутого патента US 2002/0103622, G 06 F, 15/00, 01.08.2002. Выбор конкретного варианта построения блока 19 зависит от условий практической реализации предлагаемой системы и не является предметом настоящего изобретения.
Следует отметить, что архитектура и схема построения экспертных систем различаются в первую очередь по следующим характеристикам:
- способам представления данных и знаний;
- составу используемых знаний;
- методам работы интерпретатора 27.
Выбор тех или иных характеристик экспертной системы определяется характером решаемых задач и ожидаемыми свойствами экспертной системы, что также не относится к предмету настоящего изобретения.
Рассматриваемая система сбора и анализа данных о ДТП работает следующим образом.
В процессе движения ТС блоком 1 измерителей параметров движения ТС в общем случае измеряются семь параметров движения, по которым в дальнейшем восстанавливается трехмерная картина траектории перемещения центра масс и изменения ориентации корпуса ТС относительно указанной траектории в трехмерном пространстве. Это:
- путевая скорость, определяемая измерителем 2 путевой скорости, в качестве которого могут быть использованы спидометр, одометр и/или тахометр, входящие в состав штатного электротехнического оборудования ТС, либо дополнительный акселерометр с интегратором, входящий в состав большинства противоугонных систем;
- три взаимно ортогональные составляющие угловой скорости, определяемые с помощью трех измерителей 3 ортогональной составляющей угловой скорости, которые устанавливаются на борту ТС во взаимно перпендикулярных плоскостях и каждый из которых построен на основе описанного выше гироскопического датчика типа ADXRS 300;
- три взаимно ортогональные составляющие ускорения, определяемые с помощью трех измерителей 4 ортогональной составляющей ускорения, в качестве которых используются акселерометры, установленные во взаимно перпендикулярных плоскостях.
В зависимости от требуемой точности восстановления картины ДТП и размерности решаемой задачи (трехмерная или плоская), количество измеряемых параметров движения может быть различным. Например, в простейшем случае может быть использован измеритель 2 путевой скорости и один измеритель 3 ортогональной составляющей угловой скорости на базе гироскопического датчика, позволяющий определить, например, только скорость изменения угла рыскания (курсового угла).
Аналоговые сигналы, получаемые с помощью вышеуказанных измерителей, циклически с частотой, зависящей от заданной разрешающей способности, подаются через общую шину 5 на входы АЦП 6, в котором они преобразуются в соответствующие кодовые сообщения. С выхода АЦП 6 эти кодовые сообщения поступают на вход блока 7 обработки данных бортовых измерений и далее в регистр 8 памяти, количество ячеек памяти которого определяется заданной продолжительностью восстанавливаемого участка траектории, на котором произошло ДТП, и требуемой разрешающей способностью записи. После заполнения всех ячеек памяти регистра 8 памяти каждое новое кодовое сообщение вытесняет хранящееся в регистре 8 памяти самое раннее сообщение. Этот процесс протекает циклически.
Одновременно поток кодовых сообщений с выхода АЦП 6 поступает в решающее устройство 9, представляющее собой микропроцессор с памятью, в котором из указанных кодовых сообщений формируются управляющие воздействия для формирования команд управления.
Такими командами могут быть, например,
- команда фиксации положения ТС - подается с заранее установленными интервалами, например один раз в каждые два часа, и служит для периодической записи положения ТС на трассе;
- команда фиксации остановок - подается при каждой остановке движения ТС и служит для контроля за соблюдением водителем режима движения по трассе;
- команда начала ДТП - подается при возникновении таких показаний блоков 1-3, которые свидетельствуют о начале ДТП, и служит для фиксации ближайшей предыстории ДТП (последние 5-15 с), чтобы в дальнейшем облегчить специальным органам анализ причин ДТП;
- команда окончания ДТП - подается после команды начала ДТП при показаниях блоков 1-3, которые свидетельствуют о полной неподвижности ТС, и служит для полной фиксации ДТП.
С выхода решающего устройства 9 управляющие воздействия поступают на вход блока 10 формирования команд управления. Блок 10 формирования команд управления по управляющему воздействию формирует соответствующие команды и подает их на управляющий вход регистра 8 памяти для активации режима считывания требуемых данных из регистра 8 памяти через блок 11 преобразования формата данных в энергонезависимую память 12.
Так, например, в соответствии с командой окончания ДТП полное содержимое регистра 8 считывается через блок 11 преобразования формата данных в энергонезависимую память 12, например во флэш-память. В отличие от прототипа, в котором при ДТП после достижения путевой скоростью нулевого значения процесс записи информации в регистр 8 памяти прекращается, в рассматриваемой системе этого не происходит.
Соответственно, в случае повторного наезда на остановившееся ТС другого ТС траектория последующего движения ТС будет зафиксирована так же, как и на первичной фазе ДТП. Это является существенным преимуществом рассматриваемой системы по сравнению с прототипом.
Другим преимуществом заявленной системы является возможность оперативного съема данных из энергонезависимой памяти 12 с помощью блока 13 считывания данных и передачи их с помощью блока 14 беспроводной передачи данных на приемник 16 беспроводной связи, находящийся в центре 15 сбора и анализа информации о ДТП для последующего оперативного анализа.
В качестве блока 14 беспроводной передачи данных может быть использован, например, стандартный модем GSM 900/1800, а в качестве приемника 16 беспроводной связи - аналогичный модем GSM 900/1800.
Сигнал с выхода приемника 16 беспроводной связи поступает на вход блока 17 первичной обработки данных. В блоке 17 осуществляется селекция информационных сообщений, несущих информацию о характере траектории движения центра масс ТС, об ориентации ТС в пространстве, о местоположении ТС, о характеристиках узлов и агрегатов ТС и о данных биометрических измерений, свидетельствующих о физических состояниях водителя и пассажиров ТС. Эти данные преобразуются в требуемый формат и подаются в блок 18 вторичной обработки данных. Информационные сообщения, поступающие из приемника 16 беспроводной связи, представляют собой семантическую информацию, характеризующую изменения параметров движения ТС в трехмерном пространстве, состояний узлов и агрегатов ТС, бортовых средств обеспечения безопасности, а также физических состояний водителя и пассажиров ТС при наступлении ДТП. Для удобства анализа эту информацию отображают на фоне цифровой модели местности, в которой произошло ДТП. Указанный фрагмент карты запрашивается из внешнего источника информации и скачивается с сервера соответствующего поставщика указанной карты в блок 18 вторичной обработки данных. Блок 18 вторичной обработки данных имеет доступ к различным типам внешних данных через систему независимых драйверов, обеспечивающих развязку графического ядра и пользовательского интерфейса с системой хранения и управления данными, что обеспечивает возможность использования различных форматов хранения данных (СУБД, CAD-файлы, специализированные хранилища и т.п.).
Организация доступа к внешним источникам информации из блока 18 вторичной обработки данных обеспечивается следующим образом: графическое ядро работает через открытый интерфейс с набором драйверов внешних источников информации. Каждый драйвер в свою очередь может работать с любым внешним источником информации, что позволяет интегрировать в единой среде информацию из различных внешних источников, например, клиент-серверные СУБД, файл-серверные СУБД, CAD-файлы, растровые массивы. Одним из внешних источников данных может быть TCP/IP соединение через INTRANET/INTERNET. Так как интерфейс работы ГИС Geobuilder с драйвером описан, пользователь может сам разрабатывать драйверы для различных хранилищ и баз данных.
Из блока 18 вторичной обработки данных информация поступает в блок 19 поддержки принятия решений, работающий по принципу экспертной системы и выполненный в виде автоматизированного рабочего места оператора, связанного с внешними источниками информации (см. фиг.4).
Рекомендации и предложения для лиц, принимающих решения об оказании экстренной медицинской помощи и о спасении пострадавших в ДТП, принимаются оператором по совокупности данных
- о параметрах движения ТС в трехмерном пространстве на аварийном участке траектории, определяемых с помощью блока 1 измерителей параметров движения ТС;
- о местоположении ТС относительно местности, например на улично-дорожной сети, определяемом с помощью навигационного блока 20;
- о состояниях ТС, водителя и пассажиров, определяемых с помощью следующих комплексов, входящих в состав бортового измерительного узла 21;
- комплекса 22 измерителей состояния узлов и агрегатов ТС;
- комплекса 23 бортовых средств обеспечения безопасности;
- комплекса 24 измерителей биометрических данных о физических состояниях водителя и пассажиров.
Указанные семантические и картографические данные поступают на монитор оператора блока 19 поддержки принятия решений и оцениваются им с учетом экспертных данных, получаемых от внешних источников информации (например, запрашиваемых оператором в центрах скорой медицинской помощи, травмопунктах и других организациях, владеющих такой информацией).
Оператор на ограниченном естественном языке вводит через лингвистический процессор 25 запросы на получение необходимых данных из рабочей памяти 26. Рабочая память 26 получает данные о ДТП из блока 18 вторичной обработки данных и взаимодействует с интерпретатором 27. Интерпретатор 27 на основе входных данных, продукционных правил и получаемых из базы знаний 28 подсказок формирует решение поставленной задачи. Указанное решение в виде экспертной оценки поступает в рабочую память 26, откуда оно запрашивается оператором, участвующим в информационной поддержке процесса принятия решений об экстренной медицинской помощи и спасении пострадавших в ДТП.
В качестве примера на фиг.5 приведен алгоритм определения момента времени начала перезаписи данных о ДТП из активной базы данных рабочей памяти 26 в архивную базу данных рабочей памяти 26. Указанный алгоритм включает в себя первичную экспертную оценку критического интервала времени, проводимую в центре 15 сбора и анализа информации о ДТП после получения данных о ДТП с борта ТС. После установления критического интервала времени данные о ДТП в пределах указанного интервала записываются в рабочую память 26 и активируют интерпретатор 27, который в свою очередь вызывает из базы знаний 28 необходимую экспертную информацию из внешних источников. По характеру и тяжести повреждений, полученных ТС, водителем и пассажирами в результате ДТП, с использованием необходимой экспертной информации из внешних источников, получают ответ на вопрос - увеличить ли размер критического интервала времени ? При положительном ответе на этот вопрос устанавливают больший критический интервал времени и увеличивают объем записи данных о ДТП в рабочую память 26. Если тяжесть повреждений столь велика, что необходимо немедленное реагирование, запись и анализ данных прекращают, оператор выдает в службы экстренной медицинской помощи и/или в службу спасения тревожное сообщение о необходимости незамедлительного выезда, а данные о ДТП переписываются в архивную базу данных, входящую в состав рабочей памяти 26.
Схема построения блока 19 поддержки принятия решений является обобщенной и не претендует на универсальность. Построение аппаратуры и конкретных алгоритмов, используемых для анализа траекторной информации и различных параметров, зарегистрированных во время ДТП, выходит за рамки настоящего изобретения, и в данной заявке этот вопрос не рассматривается. Поэтому в качестве существенного отличительного признака в данной заявке заявлен лишь сам блок 19 поддержки принятия решений, а не входящие в его состав элементы.
Таким образом, в результате применения предлагаемой системы лица, принимающие решения об оказании экстренной медицинской помощи пострадавшим и об их спасении, имеют объективную оперативную информацию
- о траектории движения и ориентации ТС относительно указанной траектории,
- о состоянии отдельных узлов и агрегатов ТС,
- о состоянии систем обеспечения безопасности ТС (воздушной подушки, ремней безопасности пр.),
- о физическом состоянии пострадавших.
Наличие объективной оперативной информации может помочь разобраться в истинной картине ДТП и выбрать оптимальный вариант экстренной медицинской помощи и спасения пострадавших.
Следует отметить, что реализация столь сложной системы стала возможной лишь в последние годы, когда на коммерческом рынке появились сравнительно недорогие и высокоэффективные приборы, пригодные для работы на борту ТС: гироскопический датчик ADXRS 300, энергонезависимая флэш-память, высокопроизводительные микропроцессорные системы и др.
Это позволяет заменить традиционный автомобильный тахограф с непрерывной записью маршрутных данных на бумажном носителе и последующей их длительной расшифровкой на более совершенное устройство цифровой регистрации и воспроизведения маршрутных данных, расширить спектр измеряемых параметров на участках ДТП и реализовать дистанционный съем записанной на борту ТС информации с последующим ее анализом в специализированных центрах сбора и анализа информации о ДТП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГИСТРАЦИИ И ВОССТАНОВЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2221277C1 |
| СПОСОБ КООРДИНАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ И КОМПЛЕКСНОГО КОНТРОЛЯ ЗА БЕЗОПАСНОСТЬЮ ДОРОЖНОГО ДВИЖЕНИЯ | 2010 |
|
RU2457544C2 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ОПОВЕЩЕНИЯ | 2006 |
|
RU2298494C1 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2279714C1 |
| Способ экстренного оповещения при опасных ситуациях и авариях на дорогах | 2019 |
|
RU2728951C1 |
| Способ непрерывного контроля психофизиологического состояния водителей, перевозящих опасные грузы и пассажиров по дорогам общего пользования, система, его реализующая, и блок обработки и управления, используемый в ней | 2015 |
|
RU2662293C2 |
| СПОСОБ И СИСТЕМА АВТОМАТИЗИРОВАННОЙ КЛАССИФИКАЦИИ ПОВРЕЖДЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2814788C1 |
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2207262C1 |
| БОРТОВОЕ УСТРОЙСТВО РЕГИСТРАЦИИ | 2018 |
|
RU2698290C1 |
| БОРТОВОЕ УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ | 2011 |
|
RU2480834C1 |
Изобретение относится к технике обеспечения безопасности дорожного движения. На транспортном средстве (ТС) установлены блок измерителей параметров движения ТС, входящий в состав бортового измерительного узла, аналого-цифровой преобразователь, регистр памяти и решающее устройство. В системе имеются также навигационный блок, блок обработки данных бортовых измерений, блок формирования команд управления и последовательно соединенные блок преобразования формата данных, энергозависимая память, блок считывания данных и блок беспроводной передачи данных. Центр сбора и анализа информации о дорожно-транспортных происшествиях содержит последовательно соединенные приемник беспроводной связи, связанный по радиоэфиру с установленным на ТС блоком беспроводной передачи данных, блоки первичной и вторичной обработки данных от ТС и блок поддержки принятия решений, выполненный с возможностью информационной поддержки в служб экстренной медицинской помощи и спасения. Изобретение обеспечивает возможность восстановления более полной картины дорожно-транспортных происшествий и оперативного анализа данных. 6 з.п. ф-лы, 5 ил.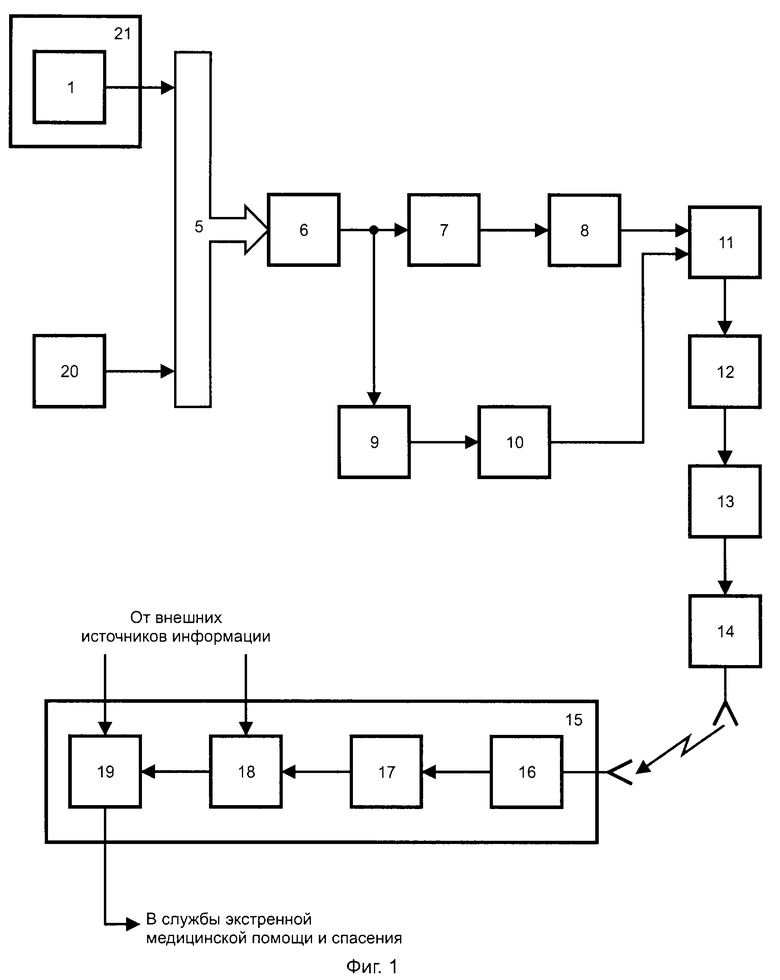
| GB 2055469 A, 04.03.1981 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 4188618 A, 12.02.1980 | |||
| УСТРОЙСТВО ЗАМЕРА И ФИКСАЦИИ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2102263C1 |

